
Electrically Driven Lower Limb Exoskeleton Rehabilitation Robot Based on Anthropomorphic Design

 , ,
, ,
Abstract
:1. Introduction
- (1)
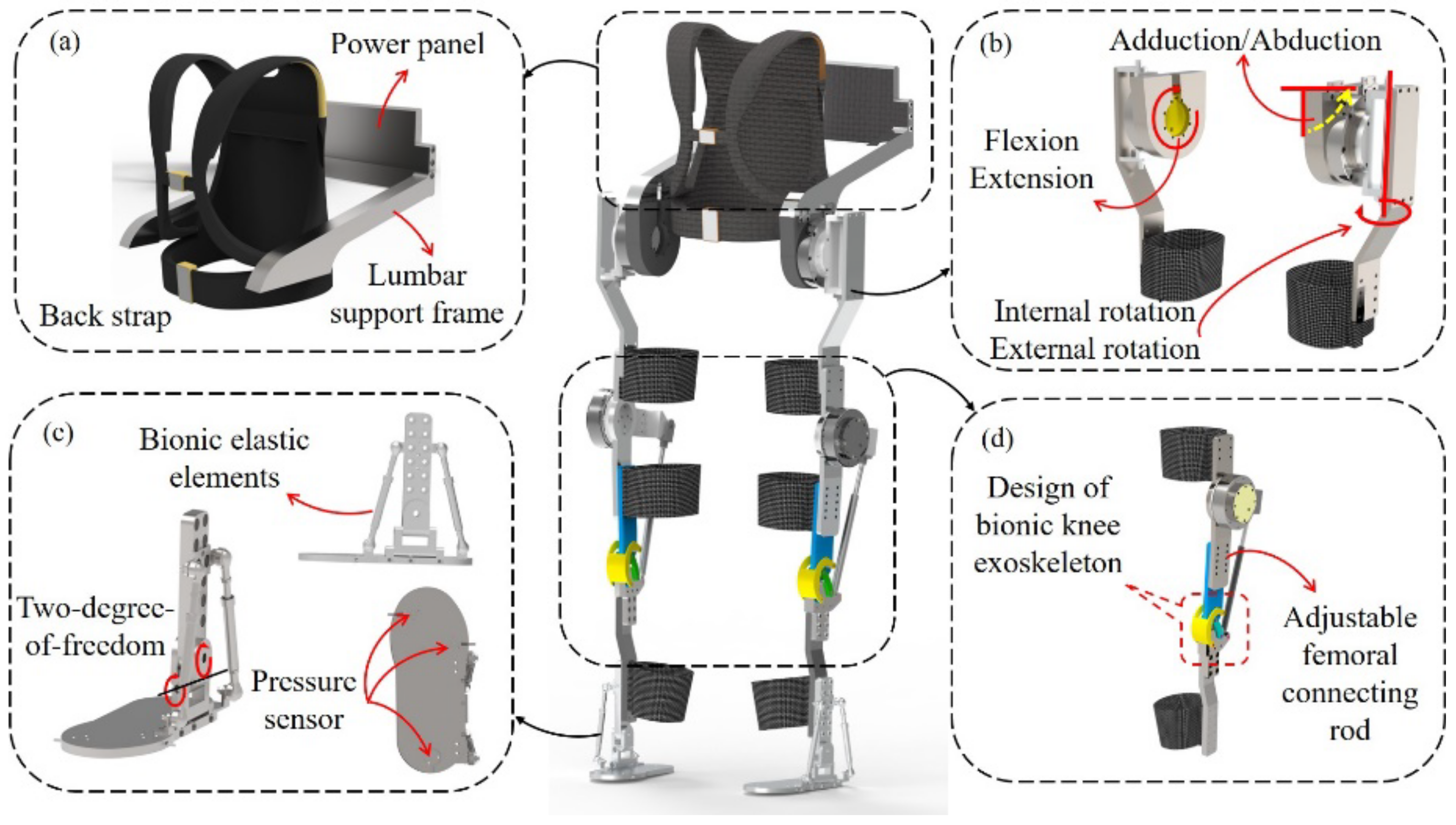
- An anthropomorphic, multi-degree-of-freedom (DOF), electrically driven lower-limb exoskeleton rehabilitation robot walking aid was proposed. The robot adopted an active–passive anthropomorphic design with 12 degrees of freedom. The multi-degree-of-freedom hip exoskeleton, bionic artificial knee exoskeleton and passive rigid–flexible-coupling ankle exoskeleton can assist patients in rehabilitation exercises with better wear comfort and exercise flexibility. The innovative anthropomorphic structural design method will play an important reference role in assisting lower-limb exoskeleton rehabilitation training and also provide theoretical support for the optimization and upgrading of lower-limb exoskeleton rehabilitation robots.
- (2)
- Based on the Lagrange mechanics method, the dynamic model of a seven-bar lower-limb exoskeleton rehabilitation robot and data analysis of dynamic trajectory capture were established, and the accuracy of exoskeleton robot motion is verified by simulation analysis. The control system of passive rehabilitation training for the lower-limb exoskeleton rehabilitation robot was designed. The wearing comfort and movement flexibility of the lower-limb exoskeleton rehabilitation robot system were verified by having test subjects wear the device, confirming it can provide adequate assistance for patients in standing and walking rehabilitation training.
2. Biomechanical Analysis of the Human Body
2.1. Design Concept
2.2. Hip Structural Design
2.3. Knee Structural Design
2.4. Ankle Structural Design
3. Mathematical Model Analysis of Lower-Limb Exoskeleton Kinetic Analysis
3.1. Analysis of Lower-Limb Dynamic Model
- : Lower-limb exoskeleton robot torque;
- : Patient torque;
- : Inertia matrix;
- : Coriolis force and centripetal force matrix;
- : Gravity matrix.
3.2. Single-Leg Support Phase Mode
3.3. Double-Leg Support Phase Mode

4. Human Gait Data Collection and Dynamic Simulation
4.1. Human Gait Data Acquisition and Processing
4.2. Dynamic Simulation Analysis
5. Control System and Experiment of Lower-Limb Rehabilitation Robot
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- World Health Organization. World Population Trend Report. In Proceedings of the 51st Meeting of the United Nations Commission on Population and Development, New York, NY, USA, 9–13 April 2018; Available online: https://news.un.org/zh/story/2004/09/21452 (accessed on 1 April 2022).
- Shi, J.; Hua, W.; Tang, D.; Xu, K.; Xu, Q. A Study on Supply–Demand Satisfaction of Community-Based Senior Care Combined with the Psychological Perception of the Elderly. Healthcare 2021, 9, 643. [Google Scholar] [CrossRef] [PubMed]
- He, Y.; Li, N.; Wang, C.; Xia, L.; Yong, X.; Wu, X. Development of a novel autonomous lower extremity exoskeleton robot for walking assistance. Front. Inf. Technol. Electron. Eng. 2019, 20, 318–329. [Google Scholar] [CrossRef]
- Chen, S.; Han, T.; Dong, F.; Lu, L.; Liu, H.; Tian, X.; Han, J. Precision interaction force control of an underactuated hydraulic stance leg exoskeleton considering the constraint from the wearer. Machines 2021, 9, 96. [Google Scholar] [CrossRef]
- Xu, F.; Huang, R.; Cheng, H.; Qiu, J.; Xiang, S.; Shi, C.; Ma, W. Stair-ascent strategies and performance evaluation for a lower limb exoskeleton. Int. J. Intell. Robot. Appl. 2020, 4, 278–293. [Google Scholar] [CrossRef]
- Mir-Nasiri, N. Conceptual design of energy efficient lower extremity exoskeleton for human motion enhancement and medical assistance. Mechatron. Robot. Eng. Adv. Intell. Manuf. 2017, 2017, 289–301. [Google Scholar]
- Hou, Z.; Zhao, X.; Cheng, L.; Wang, Q. Recent advances in rehabilitation robots and intelligent assistance systems. Acta Autom. Sin. 2016, 42, 1765–1779. [Google Scholar]
- Riener, R.; Lünenburger, L.; Maier, G.; Colombo, V. Locomotor training in subjects with sensori-motor deficits: An overview of the robotic gait orthosis lokomat. J. Healthc. Eng. 2010, 1, 197–216. [Google Scholar] [CrossRef] [Green Version]
- Gonçalves, R.; Rodrigues, L. Development of nonmotorized mechanisms for lower limb rehabilitation. Robotica 2022, 40, 102–119. [Google Scholar] [CrossRef]
- Lu, Z.; Ye, D.; Chen, Q.; Liu, C.; Dong, H.; Cheng, D. Adaptive Adjustment Strategy for Walking Characteristics of Single-Legged Exoskeleton Robots. Machines 2022, 10, 134. [Google Scholar] [CrossRef]
- Tefertiller, C.; Hays, K.; Jones, J.; Jayaraman, A.; Hartigan, C.; Bushnik, T.; Forrest, G. Initial outcomes from a multicenter study utilizing the Indego powered exoskeleton in spinal cord injury. Top. Spinal Cord Inj. Rehabil. 2018, 24, 78–85. [Google Scholar] [CrossRef]
- Zeilig, G.; Weingarden, H.; Zwecker, M.; Dudkiewicz, I.; Bloch, A.; Esquenazi, A. Safety and tolerance of the ReWalk™ exoskeleton suit for ambulation by people with complete spinal cord injury: A pilot study. J. Spinal Cord Med. 2012, 35, 96–101. [Google Scholar] [CrossRef] [Green Version]
- Sczesny-Kaiser, M.; Höffken, O.; Aach, M.; Cruciger, O.; Grasmücke, D.; Meindl, R.; Schildhauer, T.; Schwenkreis, P.; Tegenthoff, M. HAL® exoskeleton training improves walking parameters and normalizes cortical excitability in primary somatosensory cortex in spinal cord injury patients. J. Neuroeng. Rehabil. 2015, 12, 68. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Wang, B.; Liang, Y.; Xu, D.; Wang, Z.; Ji, J. Design on electrohydraulic servo driving system with walking assisting control for lower limb exoskeleton robot. Int. J. Adv. Robot. Syst. 2021, 18, 1729881421992286. [Google Scholar] [CrossRef]
- Wang, Y.; Wang, K.; Chai, Y.; Mo, Z.; Wang, K. Research on mechanical optimization methods of cable-driven lower limb rehabilitation robot. Robotica 2022, 40, 154–169. [Google Scholar] [CrossRef]
- Lee, Y.; Kim, Y.; Lee, J.; Lee, M.; Choi, B.; Kim, J.; Park, Y. Biomechanical design of a novel flexible exoskeleton for lower extremities. IEEE/ASME Trans. Mechatron. 2017, 22, 2058–2069. [Google Scholar] [CrossRef]
- Woods, C.; Callagher, L.; Jaffray, T. Walk tall: The story of Rex Bionics. J. Manag. Organ. 2021, 27, 239–252. [Google Scholar] [CrossRef]
- Shi, D.; Zhang, W.; Zhang, W.; Ding, X. A review on lower limb rehabilitation exoskeleton robots. Chin. J. Mech. Eng. 2019, 32, 74. [Google Scholar] [CrossRef] [Green Version]
- Ding, Y.; Galiana, I.; Asbeck, A.; De Rossi, S.; Bae, J.; Santos, T. Biomechanical and physiological evaluation of multi-joint assistance with soft exosuits. IEEE Trans. Neural Syst. Rehabil. Eng. 2016, 25, 119–130. [Google Scholar] [CrossRef]
- Panizzolo, F.; Galiana, I.; Asbeck, A.; Siviy, C.; Schmidt, K.; Holt, K.; Walsh, C. A biologically-inspired multi-joint soft exosuit that can reduce the energy cost of loaded walking. J. Neuroeng. Rehabil. 2016, 13, 43. [Google Scholar] [CrossRef] [Green Version]
- Hussain, F.; Goecke, R.; Mohammadian, M. Exoskeleton robots for lower limb assistance: A review of materials, actuation, and manufacturing methods. Proc. Inst. Mech. Eng. Part H J. Eng. Med. 2021, 235, 1375–1385. [Google Scholar] [CrossRef]
- Wang, X.; Feng, Y.; Zhang, J.; Li, Y.; Niu, J.; Yang, Y.; Wang, H. Design and Analysis of a Lower Limb Rehabilitation Training Component for Bedridden Stroke Patients. Machines 2021, 9, 224. [Google Scholar] [CrossRef]
- Ning, M.; Luo, C.; Wang, Y.; Shi, X.; Wang, W.; Zhu, C. Theory analysis and structure optimization design of powered gait orthosis. Adv. Mech. Eng. 2016, 8, 1687814016633625. [Google Scholar] [CrossRef] [Green Version]
- Zhang, C.; Liu, G.; Li, C.; Zhao, J.; Yu, H.; Zhu, Y. Development of a lower limb rehabilitation exoskeleton based on real-time gait detection and gait tracking. Adv. Mech. Eng. 2016, 8, 1687814015627982. [Google Scholar] [CrossRef] [Green Version]
- Meda-Gutiérrez, J.; Zúñiga-Avilés, L.; Vilchis-González, A.; Ávila-Vilchis, J. Knee Exoskeletons Design Approaches to Boost Strength Capability: A Review. Appl. Sci. 2021, 11, 9990. [Google Scholar] [CrossRef]
- Kittisares, S.; Nabae, H.; Endo, G.; Suzumori, K.; Sakurai, R. Design of knee support device based on four-bar linkage and hydraulic artificial muscle. Robomech J. 2020, 7, 16. [Google Scholar] [CrossRef]
- Wang, Y.; Zhao, G.; Diao, Y.; Feng, Y.; Li, G. Performance analysis of unpowered lower limb exoskeleton during sit down and stand up. Robotica 2021, 1–19. [Google Scholar] [CrossRef]
- Li, F.; Wang, Q.; Xie, Y.; Xie, H. Admittance control of four-link bionic knee exoskeleton with inertia compensation. Tehnički Vjesnik 2020, 27, 891–897. [Google Scholar]
- Olinski, M.; Gronowicz, A.; Ceccarelli, M. Development and characterization of a controllable adjustable knee joint mechanism. Mech. Mach. Theory 2021, 155, 101–104. [Google Scholar] [CrossRef]
- Gao, M.; Wang, Z.; Li, S.; Pang, Z.; Li, J. Design and optimization of exoskeleton structure of lower limb knee joint based on cross four-bar linkage. AIP Adv. 2021, 11, 065124. [Google Scholar] [CrossRef]
- Jamisola, R.; Roberts, R. An approach to drastically reduce the required legs DOFs for bipedal robots and lower-limb exoskeletons. Robotica 2022, 40, 1207–1221. [Google Scholar] [CrossRef]
- Cestari, M.; Sanz-Merodio, D.; Garcia, E. Preliminary assessment of a compliant gait exoskeleton. Soft Robot. 2017, 4, 135–146. [Google Scholar] [CrossRef] [PubMed]
- Wang, L.; Tian, J.; Du, J.; Zheng, S.; Niu, J.; Zhang, Z.; Wu, J. A Hybrid Mechanism-Based Robot for End-Traction Lower Limb Rehabilitation: Design, Analysis and Experimental Evaluation. Machines 2022, 10, 99. [Google Scholar] [CrossRef]
- Zhang, P.; Zhang, J. Lower limb exoskeleton robots’ dynamics parameters identification based on improved beetle swarm optimization algorithm. Robotica 2022, 1–16. [Google Scholar] [CrossRef]
- Liu, B.; Liu, Y.; Zhou, Z.; Xie, L. Control of flexible knee joint exoskeleton robot based on dynamic model. Robotica 2022, 1–17. [Google Scholar] [CrossRef]
- Lin, M.; Wang, H.; Niu, J.; Tian, Y.; Wang, X.; Liu, G.; Sun, L. Adaptive Admittance Control Scheme with Virtual Reality Interaction for Robot-Assisted Lower Limb Strength Training. Machines 2021, 9, 301. [Google Scholar] [CrossRef]
- Wang, Y.; Li, Z.; Wang, X.; Yu, H.; Liao, W.; Arifoglu, D. Human Gait Data Augmentation and Trajectory Prediction for Lower-Limb Rehabilitation Robot Control Using GANs and Attention Mechanism. Machines 2021, 9, 367. [Google Scholar] [CrossRef]
- Rose, L.; Bazzocchi, M.; Nejat, G. A model-free deep reinforcement learning approach for control of exoskeleton gait patterns. Robotica 2021, 1–26. [Google Scholar] [CrossRef]
- Zhang, P.; Zhang, J. Motion generation for walking exoskeleton robot using multiple dynamic movement primitives sequences combined with reinforcement learning. Robotica 2022, 1–16. [Google Scholar] [CrossRef]



































{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parts | Degrees of Freedom | Human Range of Motion | Robot Range of Motion |
|---|---|---|---|
| Hip | Flexion/Extension | −15~120° | 0~100° |
| Abduction/Adduction | −30~45° | 0~45° | |
| Internal rotation external rotation | −45~45° | −25~25° | |
| Knee | Flexion/Extension | 0~135° | 0~120° |
| Ankle | Flexion/Extension | −20~45° | −10~30° |
| Inversion/Eversion | −30~20° | −15~15° |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Gao, M.; Wang, Z.; Pang, Z.; Sun, J.; Li, J.; Li, S.; Zhang, H. Electrically Driven Lower Limb Exoskeleton Rehabilitation Robot Based on Anthropomorphic Design. Machines 2022, 10, 266. https://doi.org/10.3390/machines10040266
Gao M, Wang Z, Pang Z, Sun J, Li J, Li S, Zhang H. Electrically Driven Lower Limb Exoskeleton Rehabilitation Robot Based on Anthropomorphic Design. Machines. 2022; 10(4):266. https://doi.org/10.3390/machines10040266
Chicago/Turabian StyleGao, Moyao, Zhanli Wang, Zaixiang Pang, Jianwei Sun, Jing Li, Shuang Li, and Hansi Zhang. 2022. "Electrically Driven Lower Limb Exoskeleton Rehabilitation Robot Based on Anthropomorphic Design" Machines 10, no. 4: 266. https://doi.org/10.3390/machines10040266
APA StyleGao, M., Wang, Z., Pang, Z., Sun, J., Li, J., Li, S., & Zhang, H. (2022). Electrically Driven Lower Limb Exoskeleton Rehabilitation Robot Based on Anthropomorphic Design. Machines, 10(4), 266. https://doi.org/10.3390/machines10040266