
Design and Simulation Experiment of Rigid-Flexible Soft Humanoid Finger

 ,
, 
Abstract
:1. Introduction
2. Design and Manufacturing
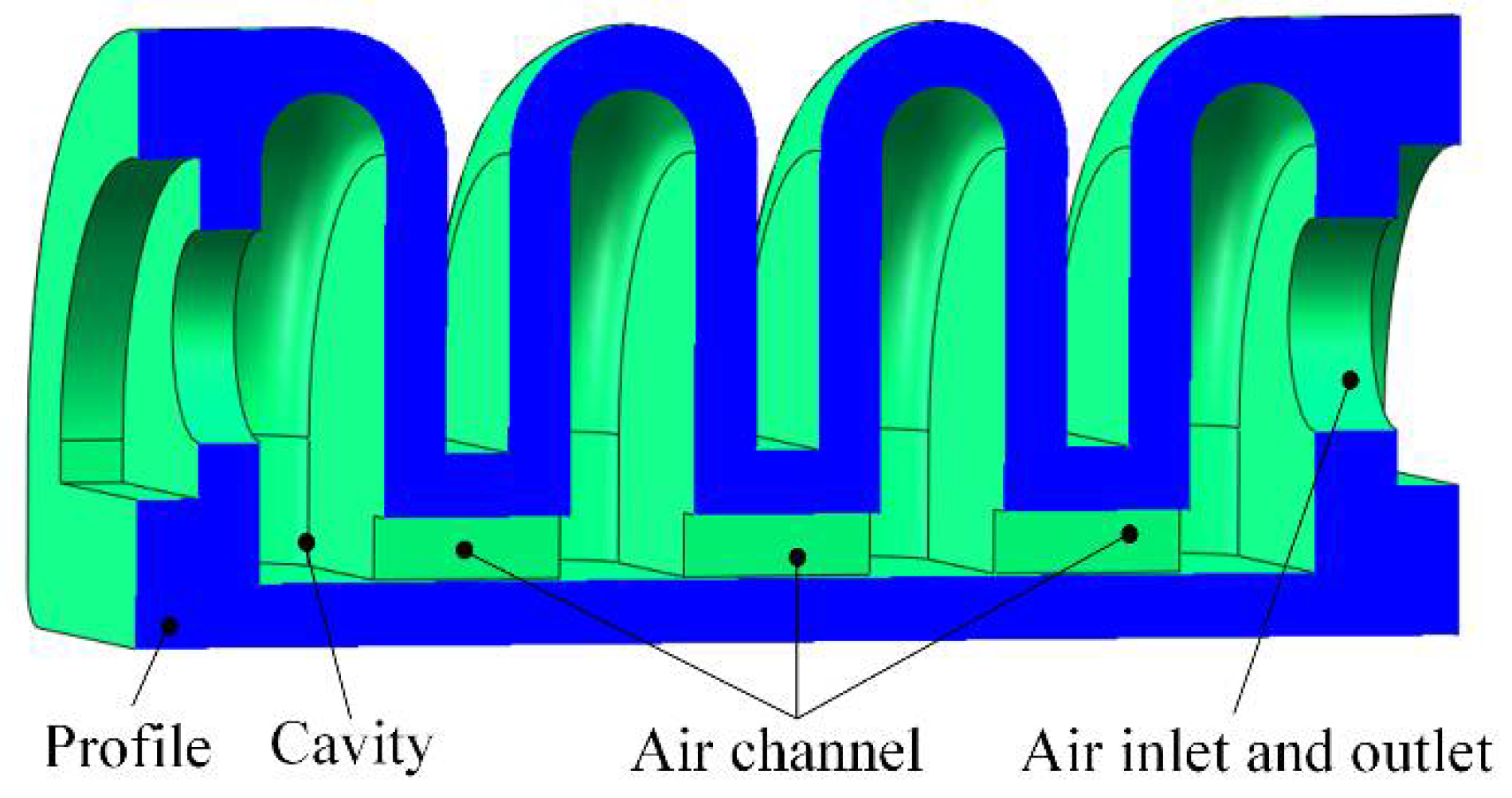
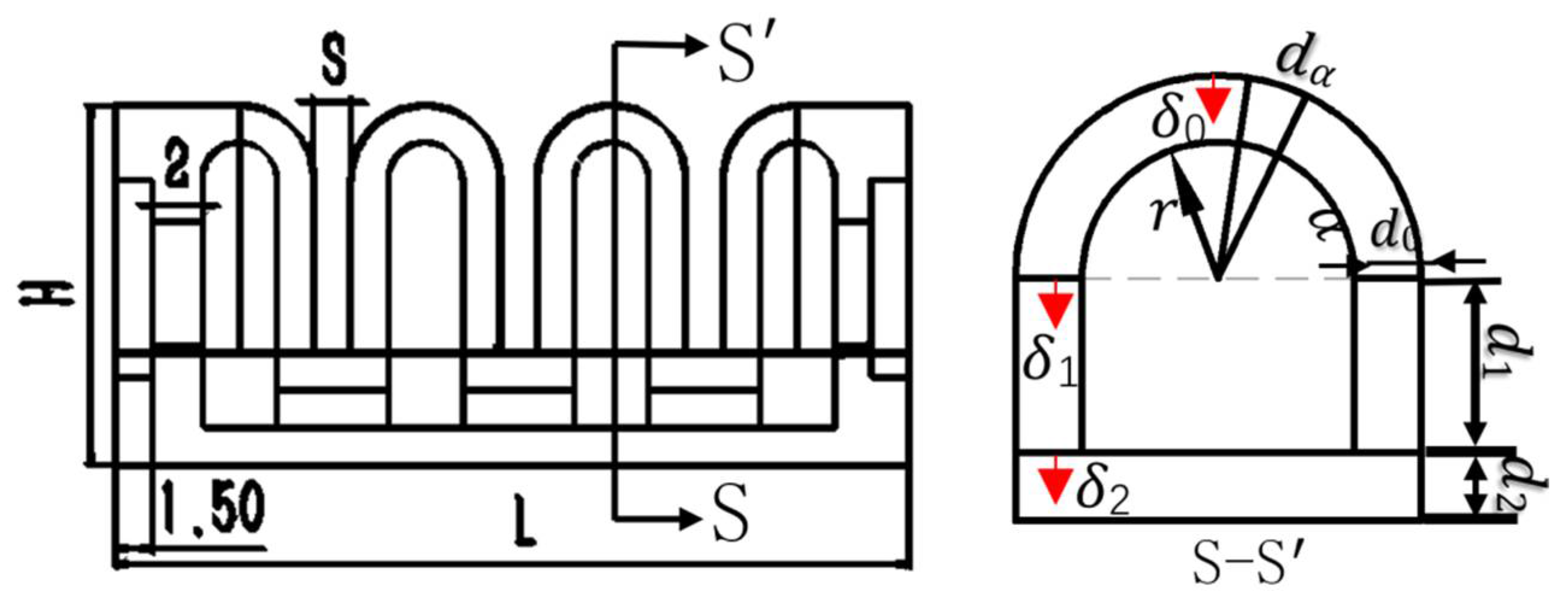
2.1. Finger Structure Design
2.2. Humanoid Finger Making
- preparation of cartilage joint of middle phalanx and distal phalanx;
- preparation of proximal phalanx joint;
- 3D printing of connecting skeleton;
- assembly of soft-body bionic finger.
3. Mathematical Model and Simulation Analysis
3.1. Movement Principle
3.2. Yeoh Strain Energy Density Function Model
- The silicone rubber material is isotropic and incompressible.
- The strain limiting layer used is not extensible.
- Under the constraint of the strain limiting layer, the width and height of the driver remain unchanged during the deformation of the driver joint.
3.3. Theoretical Analysis on Bending Deformation of Soft Bionic Fingers
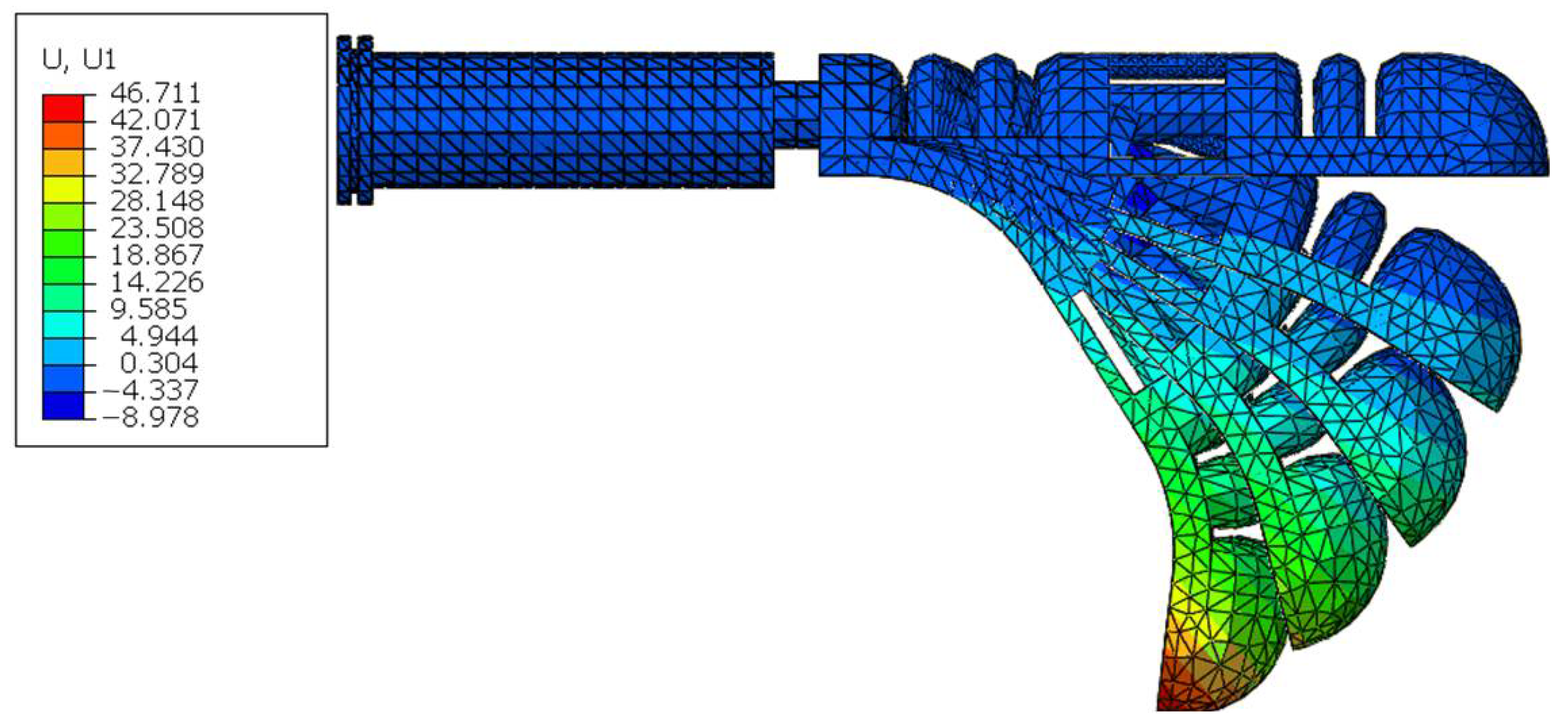
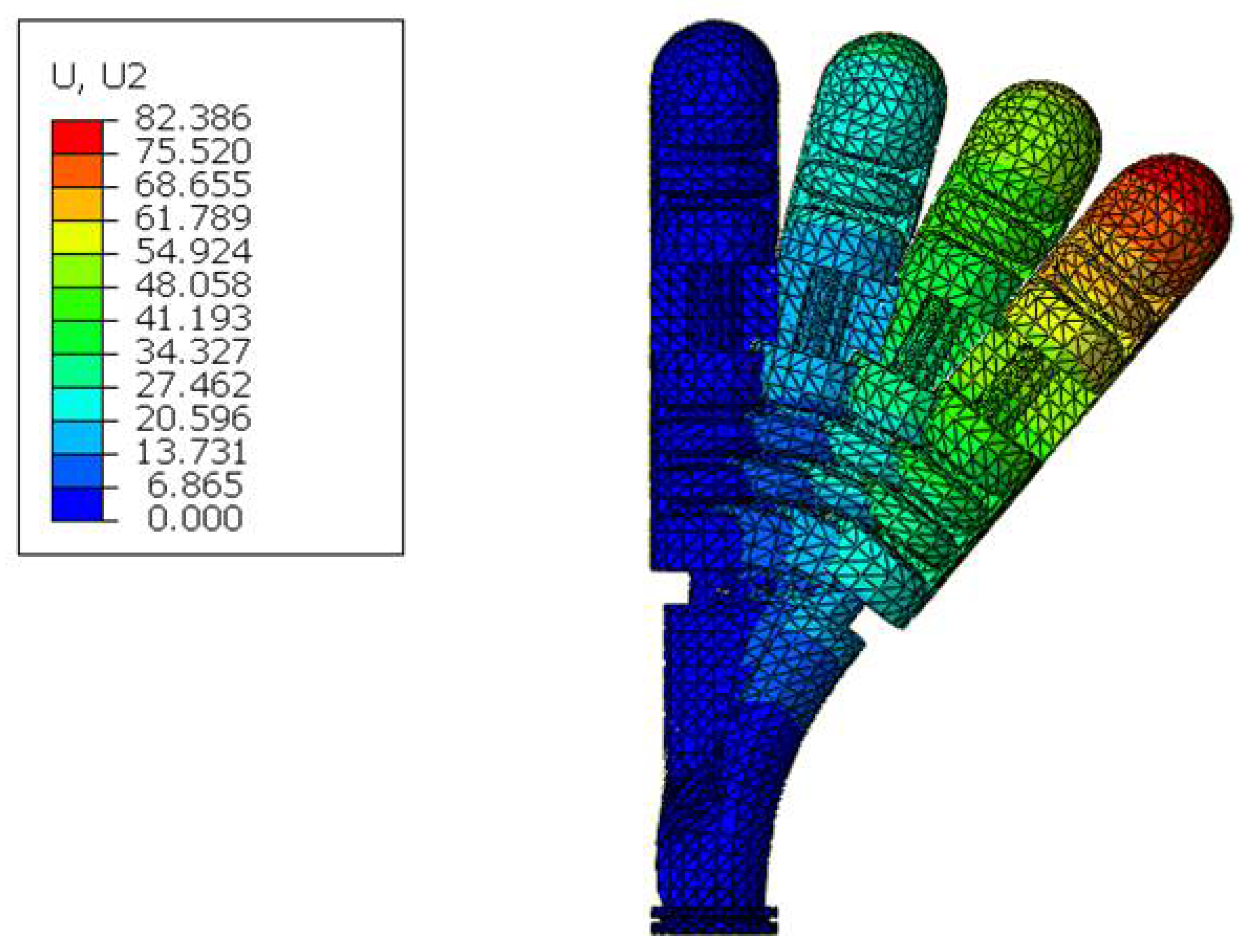
3.4. Simulation Analysis
3.5. Influence of Structural Parameters on Bending Deformation
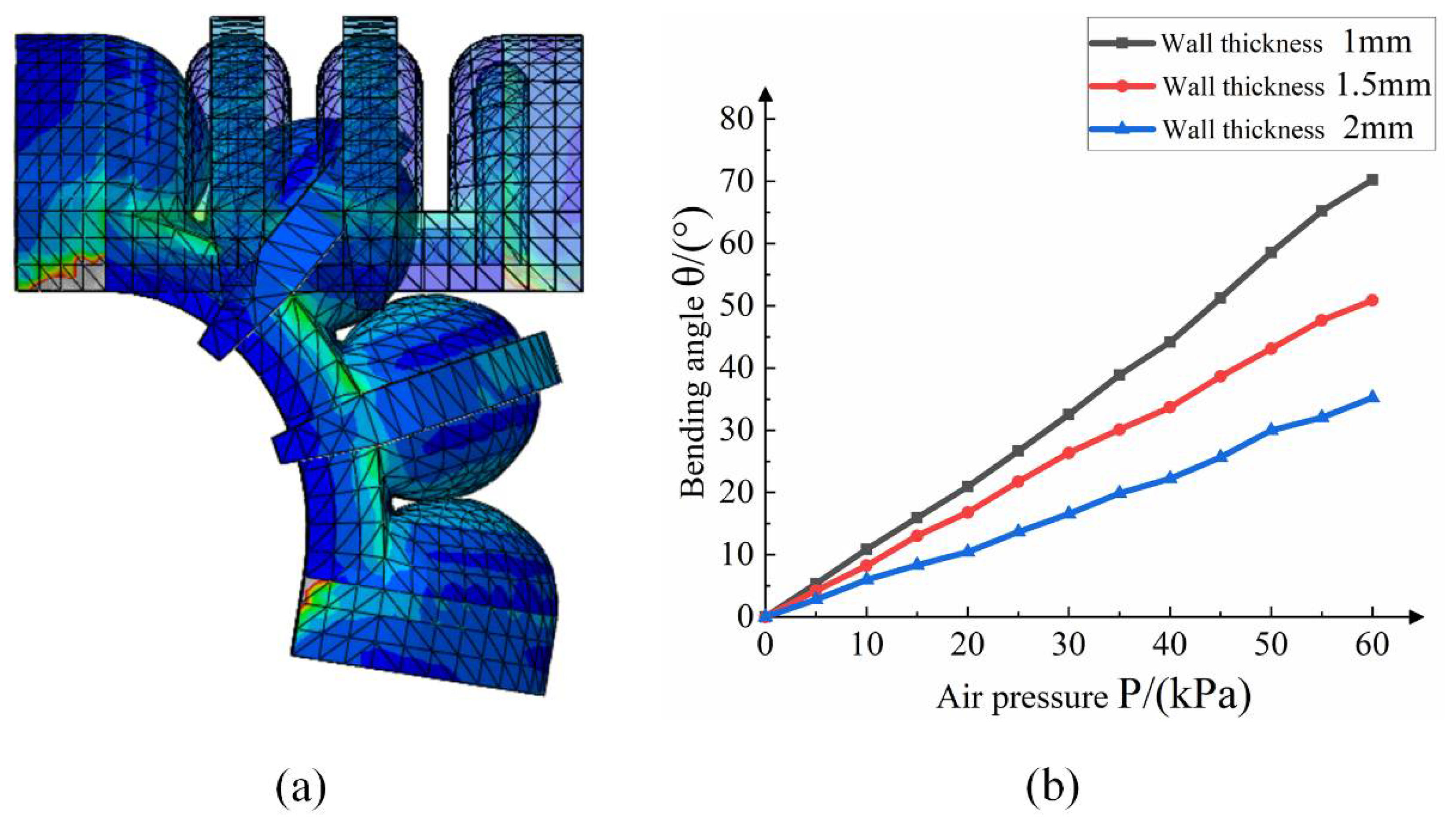
3.5.1. Influence of Air Cavity Wall Thickness on Bending
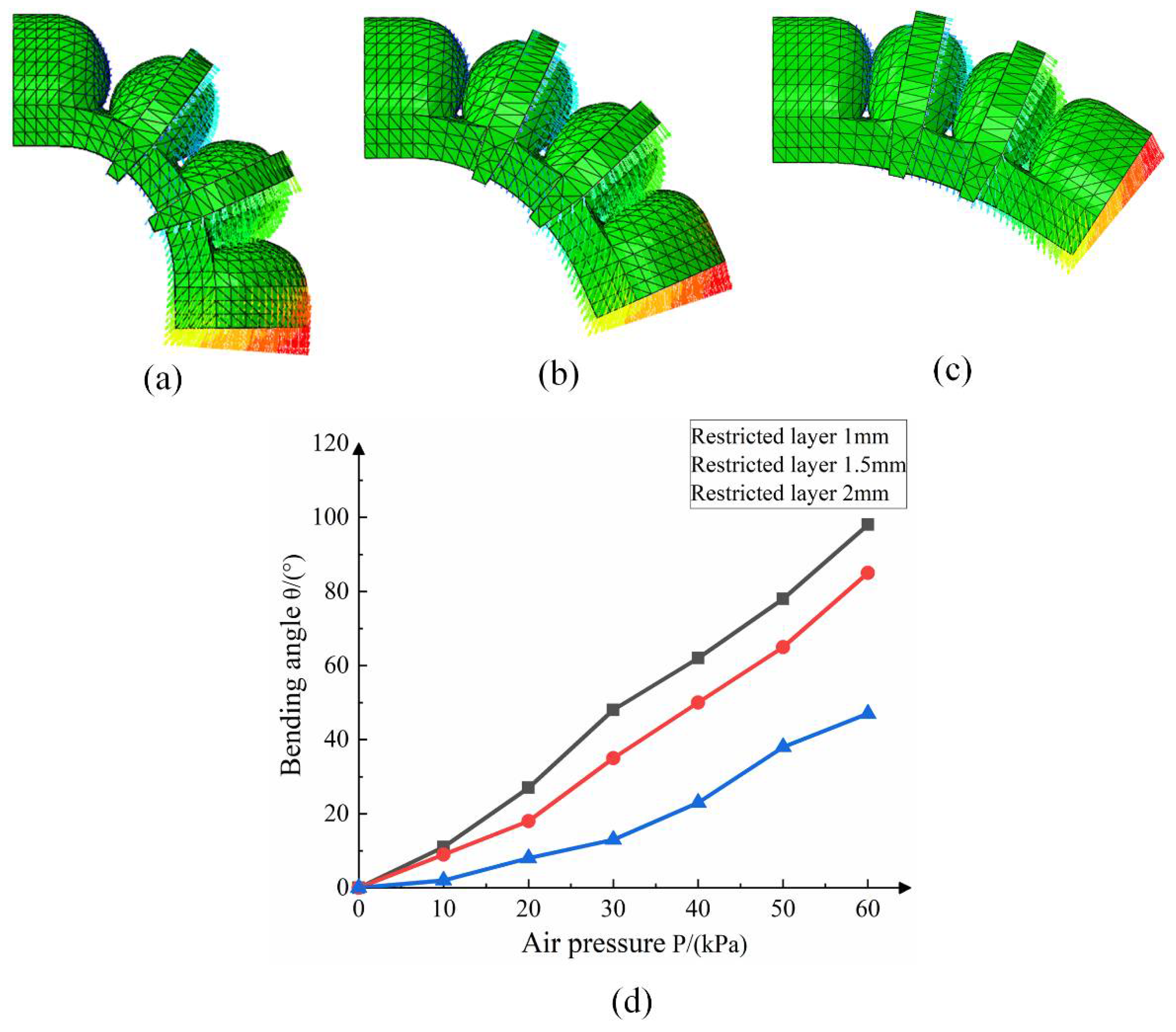
3.5.2. The Effect of Limiting Layer Thickness on Bending
4. Experiment
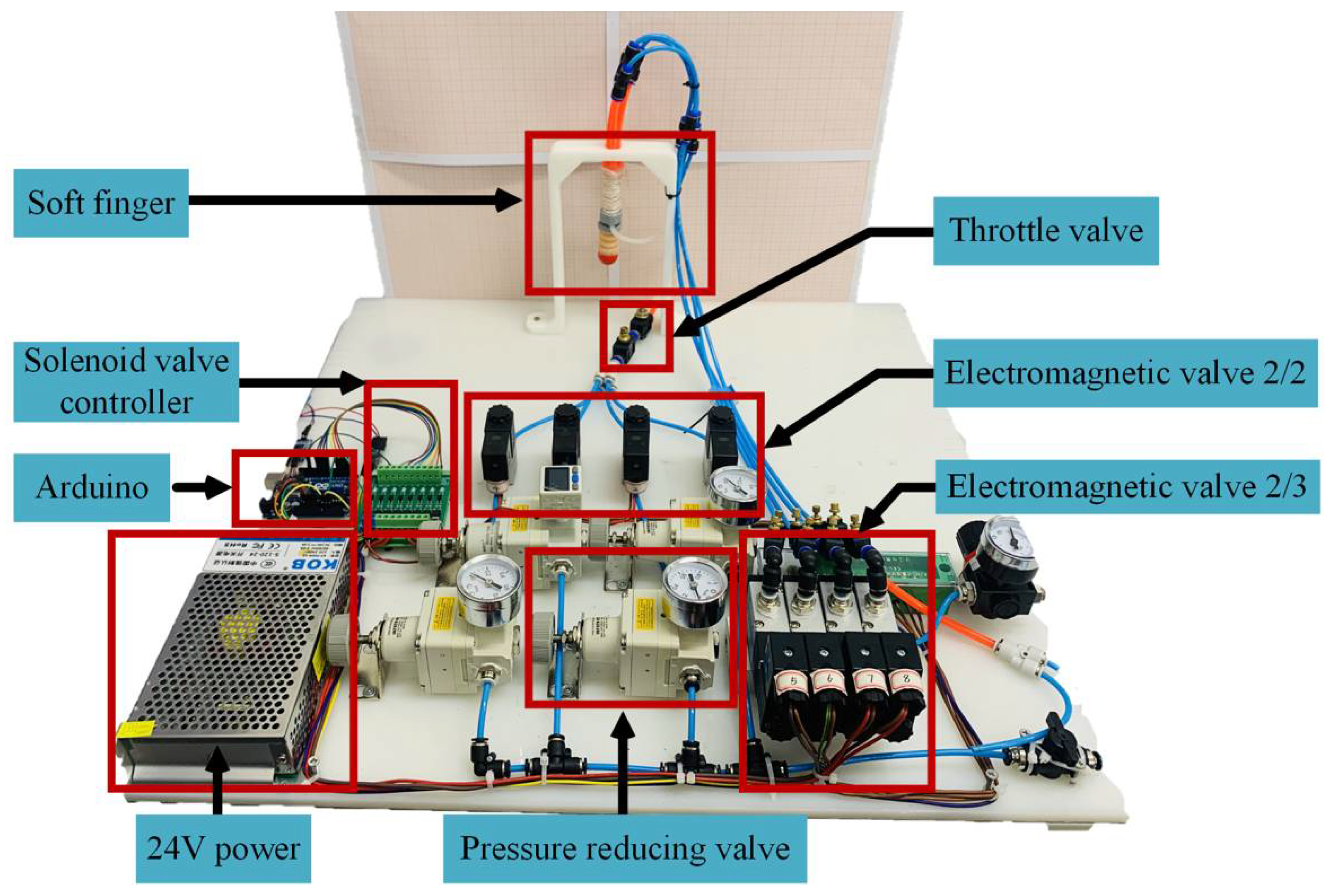
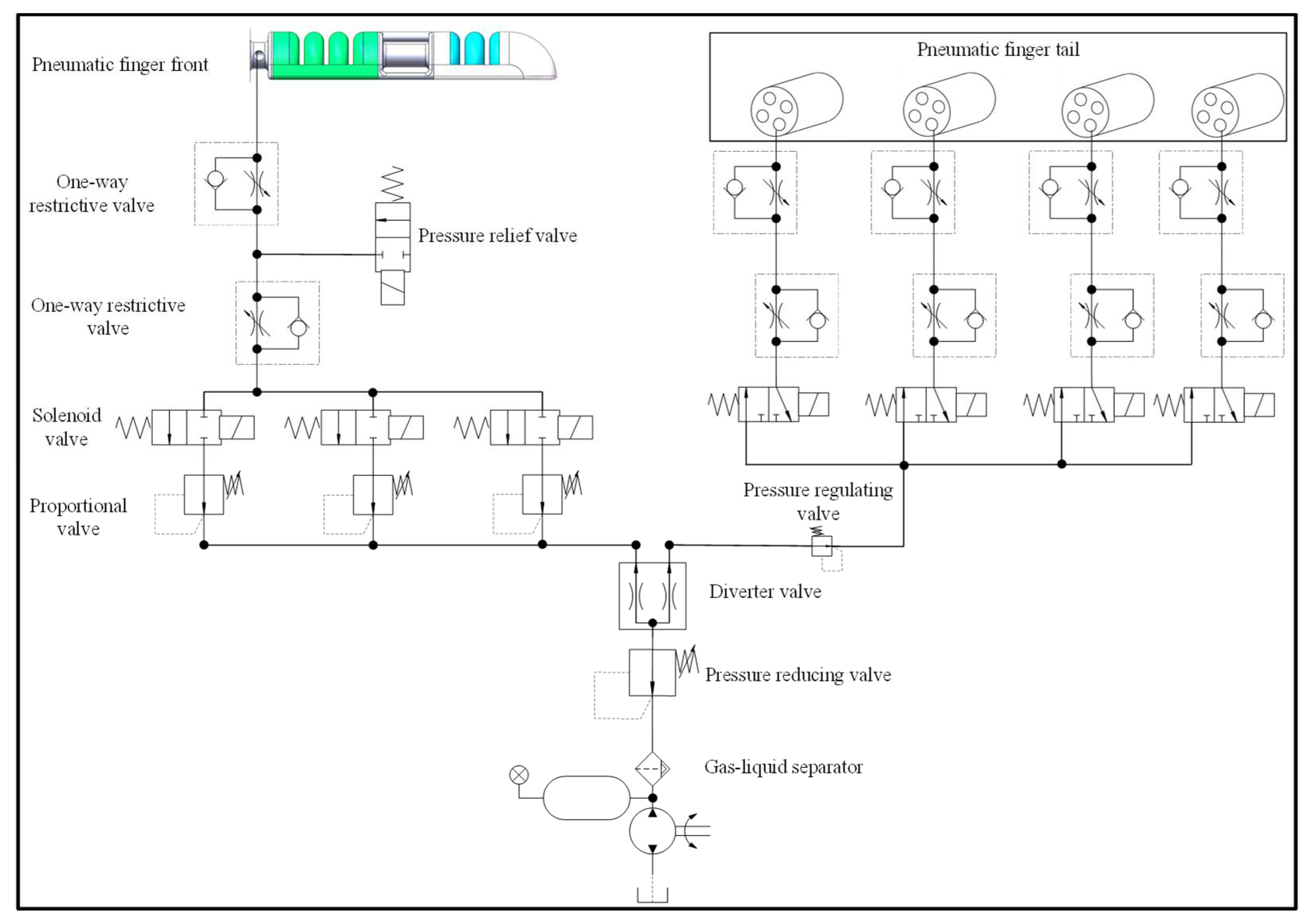
4.1. Experimental Platform and Method
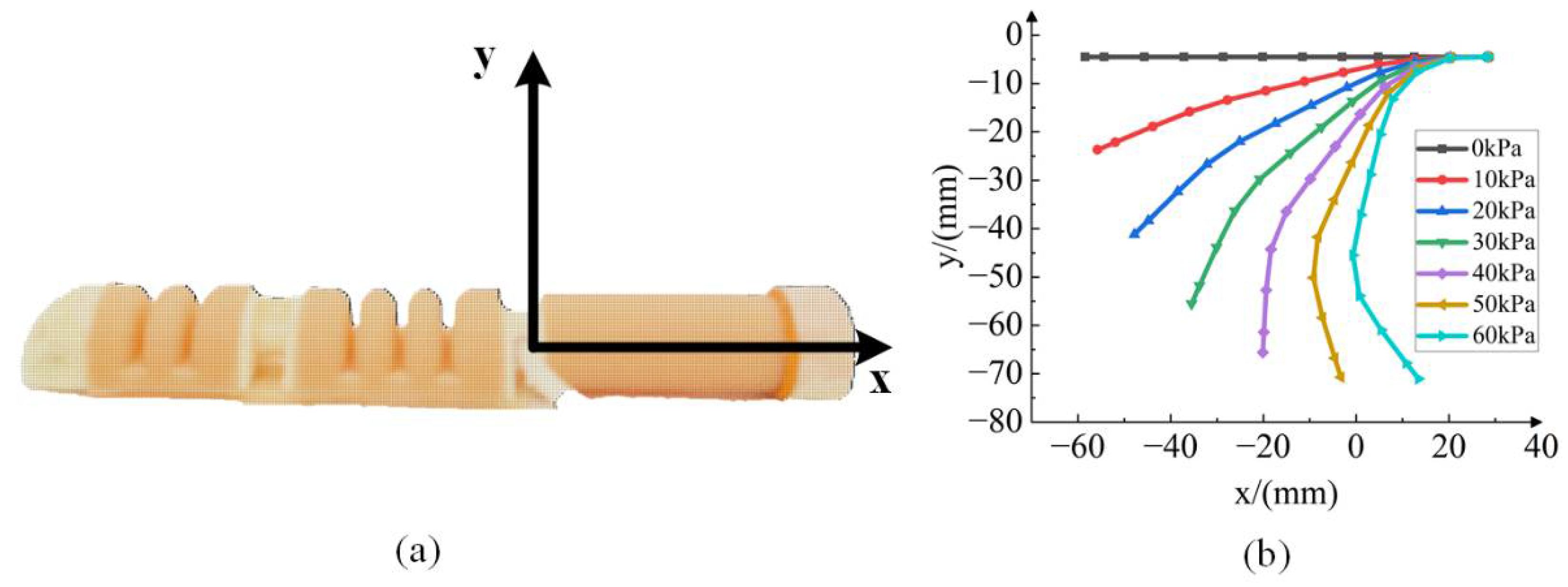
4.2. Bending Capacity Analysis
4.2.1. Analysis of Bending Performance of Interphalangeal Joints
4.2.2. Analysis of Bending Performance of Proximal Phalangeal Joint
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Guan, Q.; Sun, J.; Liu, Y.; Wereley, N.M.; Leng, J. Novel Bending and Helical Extensile/Contractile Pneumatic Artificial Muscles Inspired by Elephant Trunk. Soft Robot. 2020, 7, 597–614. [Google Scholar] [CrossRef] [PubMed]
- Chen, C.; Sun, J.; Wang, L.; Chen, G.; Xu, M.; Ni, J.; Ramli, R.; Su, S.; Chu, C. Pneumatic Bionic Hand with Rigid-Flexible Coupling Structure. Materials 2022, 15, 1358. [Google Scholar] [CrossRef]
- Guan, Q.H.; Sun, J.; Liu, Y.J.; Leng, J. Status of and trends in soft pneumatic robotics. Sci. Sin. Technol. 2020, 50, 897–934. [Google Scholar]
- Hu, Y.; Li, J.; Chen, Y.; Wang, Q.; Chi, C.; Zhang, H.; Gao, Q.; Lan, Y.; Li, Z.; Mu, Z. Design and Control of a Highly Redundant Rigid-Flexible Coupling Robot to Assist the COVID-19 Oropharyngeal-Swab Sampling. IEEE Robot. Autom. Lett. 2021, 7, 1856–1863. [Google Scholar] [CrossRef] [PubMed]
- Wattanasiri, P.; Tangpornprasert, P.; Virulsri, C. Design of Multi-Grip Patterns Prosthetic Hand with Single Actuator. IEEE Trans. Neural Syst. Rehabil. Eng. 2018, 26, 1188–1198. [Google Scholar] [CrossRef] [PubMed]
- Zhou, J.; Chen, X.; Chang, U.; Lu, J.; Leung, C.; Chen, Y.; Hu, Y.; Wang, Z. A Soft-Robotic Approach to Anthropomorphic Robotic Hand Dexterity. IEEE Access 2019, 7, 1. [Google Scholar] [CrossRef]
- Zhou, J.; Shu, C.; Zheng, W. A Soft-Robotic Gripper With Enhanced Object Adaptation and Grasping Reliability. IEEE Robot. Autom. Lett. 2017, 2, 2287–22931. [Google Scholar] [CrossRef]
- Hardman, D.; Thuruthel, T.G.; Iida, F. Self-healing ionic gelatin/glycerol hydrogels for strain sensing applications. NPG Asia Mater. 2022, 14, 11. [Google Scholar] [CrossRef]
- Liu, S.; Wang, F.; Liu, Z.; Zhang, W.; Zhang, D. A Two-Finger Soft-Robotic Gripper With Enveloping and Pinching Grasping Modes. IEEE/ASME Trans. Mechatron. 2020, 26, 146–155. [Google Scholar] [CrossRef]
- Jing, X.; Chen, S.; Zhang, C.; Xie, F. Increasing Bending Performance of Soft Actuator by Silicon Rubbers of Multiple Hardness. Machines 2022, 10, 272. [Google Scholar] [CrossRef]
- Ming, X.; Guan, W.; Cheng, R. Fiber-reinforced flexible joint actuator for soft arthropod robots. Sens. Actuators A Phys. 2022, 340, 113522. [Google Scholar] [CrossRef]
- Chen, F.; Miao, Y.; Zhang, L.; Chen, S.; Zhu, X. Triply Periodic Channels Enable Soft Pneumatic Linear Actuator with Single Material and Scalability. IEEE Robot. Autom. Lett. 2022, 7, 2668–2675. [Google Scholar] [CrossRef]
- Huang, W.; Xiao, J.; Xu, Z. A variable structure pneumatic soft robot. Sci. Rep. 2020, 10, 18778. [Google Scholar] [CrossRef]
- Xie, Z.; Domel, A.G.; An, N.; Green, C.; Wen, L. Octopus Arm-Inspired Tapered Soft Actuators with Suckers for Improved Grasping. Soft Robot 2020, 7, 639–648. [Google Scholar] [CrossRef]
- Zhao, Y.; Shan, Y.; Guo, K.; Qi, L.; Yu, H. A soft continuum robot, with a large variable-stiffness range, based on jamming. Bioinspir. Biomim. 2019, 14, 66007. [Google Scholar] [CrossRef]
- Ge, L.; Chen, F.; Wang, D.; Zhang, Y.; Gu, G. Design, Modeling, and Evaluation of Fabric-Based Pneumatic Actuators for Soft Wearable Assistive Gloves. Soft Robot 2020, 7, 583–596. [Google Scholar] [CrossRef]
- Zhang, G.; Li, S.; Wu, Y.; Zhu, M. An Investigation on the Grasping Position Optimization-Based Control for Industrial Soft Robot Manipulator. Machines 2021, 9, 363. [Google Scholar] [CrossRef]
- Ogden, R.W. Large Deformation Isotropic Elasticity: On the Correlation of Theory and Experiment for Compressible Rubberlike Solids. Proc. R. Soc. A Math. Phys. Eng. Sci. 1972, 328, 567–583. [Google Scholar] [CrossRef]
- Saunders, R.S.R.W. Large Elastic Deformations of Isotropic Materials. VII. Experiments on the Deformation of Rubber. Philos. Trans. R. Soc. London. Ser. A Math. Phys. Sci. 1951, 243, 251–288. [Google Scholar] [CrossRef]
- Huang, J.; Xie, G.; Liu, Z. Finite Element Analysis of Hyperelastic Rubber Materials Based on Mooney-Rivlin Model and Yeoh Model. Rubber Ind. 2008, 55, 467–471. [Google Scholar] [CrossRef]
- Polygerinos, P.; Zheng, W.; Overvelde, J.; Galloway, K.C.; Walsh, C.J. Modeling of Soft Fiber-Reinforced Bending Actuators. IEEE T Robot 2015, 31, 778–789. [Google Scholar] [CrossRef] [Green Version]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Number |
|---|---|
| Hardness (A) | 20 ± 2 |
| Tensile strength (Mpa) | 6.5 |
| Tear strength (kN/m) | 28 ± 2 |
| Curing time (h) | 4 |
| Parameter | Number |
|---|---|
| 0.072 | |
| 0.0025 |
| Name | Material | Elastic Modulus (Mpa) | Poisson Ratio |
|---|---|---|---|
| connection frame | ABS plastic | 2200 | 0.394 |
| constrained fibers | elastic material | 31,076 | 0.36 |
| Parameters | |||||||
| Number (mm) | 14.5 | 32 | 1.5 | 1.5 | 1.5 | 10 | 2 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Sun, J.; Chen, C.; Wang, L.; Liang, Y.; Chen, G.; Xu, M.; Xi, R.; Shao, H. Design and Simulation Experiment of Rigid-Flexible Soft Humanoid Finger. Machines 2022, 10, 448. https://doi.org/10.3390/machines10060448
Sun J, Chen C, Wang L, Liang Y, Chen G, Xu M, Xi R, Shao H. Design and Simulation Experiment of Rigid-Flexible Soft Humanoid Finger. Machines. 2022; 10(6):448. https://doi.org/10.3390/machines10060448
Chicago/Turabian StyleSun, Jiteng, Chang Chen, Long Wang, Yuandong Liang, Guojin Chen, Ming Xu, Ruru Xi, and Huifeng Shao. 2022. "Design and Simulation Experiment of Rigid-Flexible Soft Humanoid Finger" Machines 10, no. 6: 448. https://doi.org/10.3390/machines10060448
APA StyleSun, J., Chen, C., Wang, L., Liang, Y., Chen, G., Xu, M., Xi, R., & Shao, H. (2022). Design and Simulation Experiment of Rigid-Flexible Soft Humanoid Finger. Machines, 10(6), 448. https://doi.org/10.3390/machines10060448