





Linear Quadratic Optimal Control with the Finite State for Suspension System



Abstract
:1. Introduction
2. Suspension Control Model
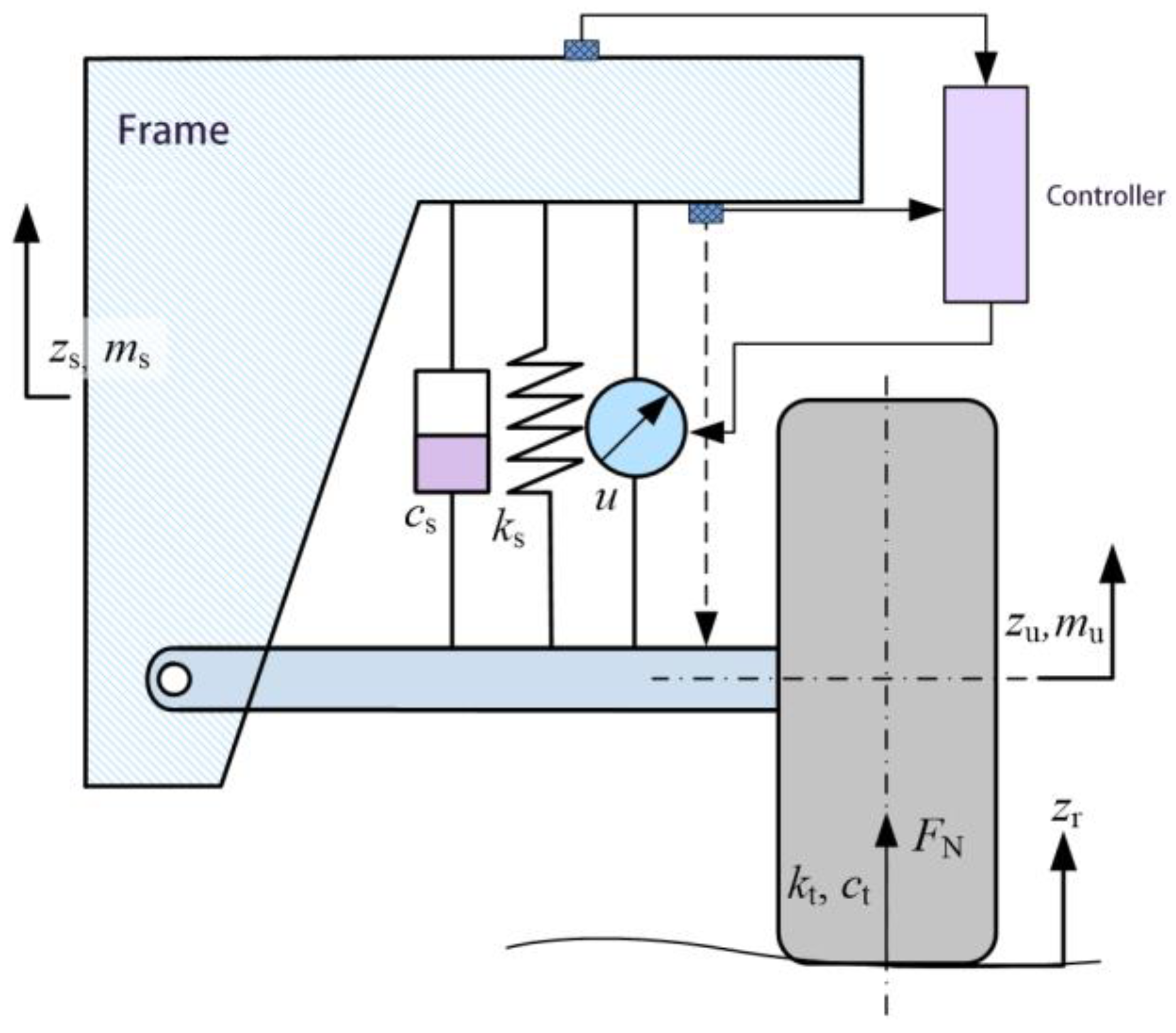
2.1. Quarter-Car Model
2.2. Suspension Performance Index
2.3. Ideal Sensor Output
2.4. State-Space Equation
3. Finite State LQR Control
3.1. Linear Quadratic Regulator
3.2. Optimization Model of Finite LQR Control
3.3. Finite State LQR Control Law
4. Examples Adopting Finite LQR Control
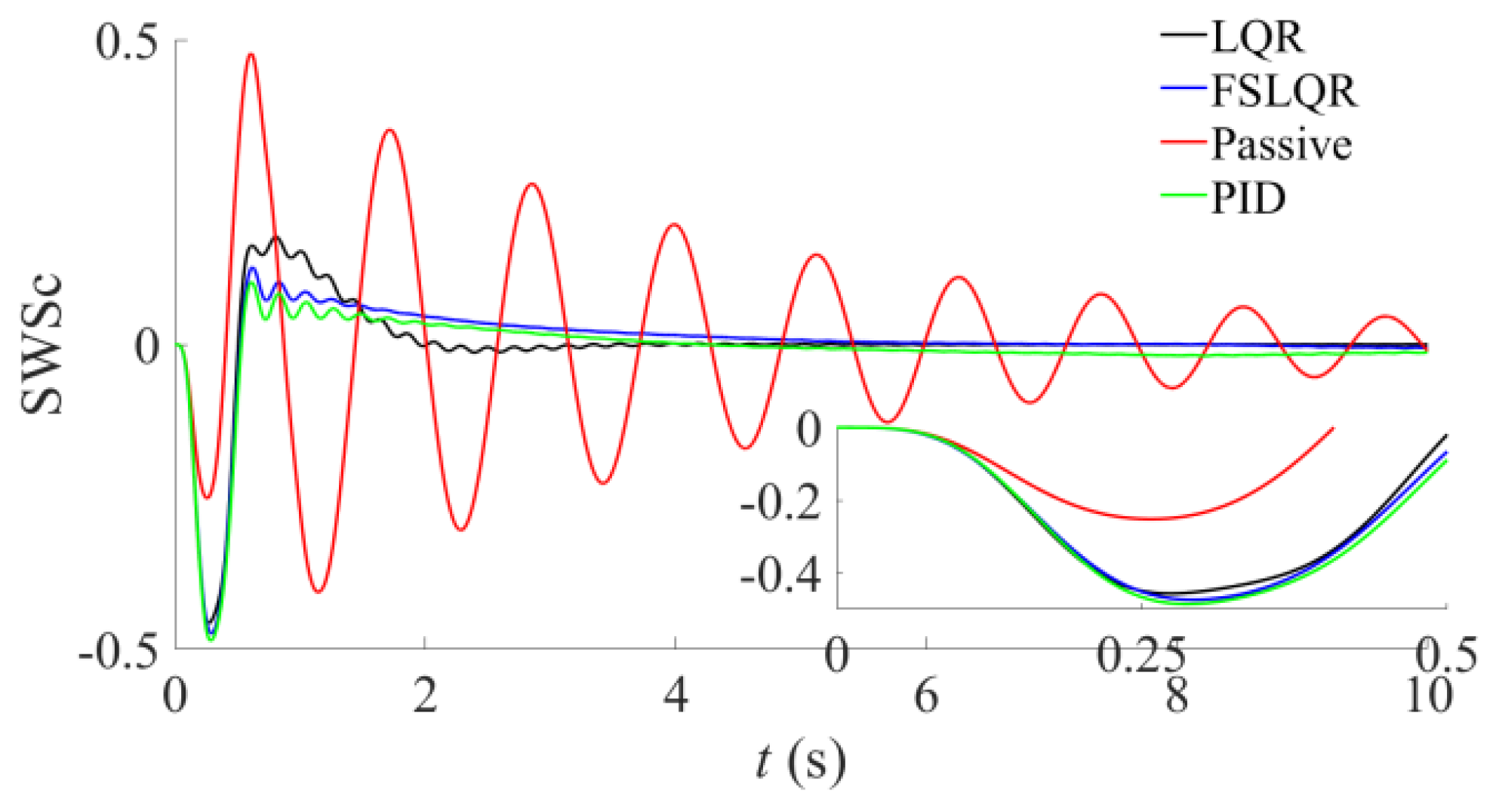
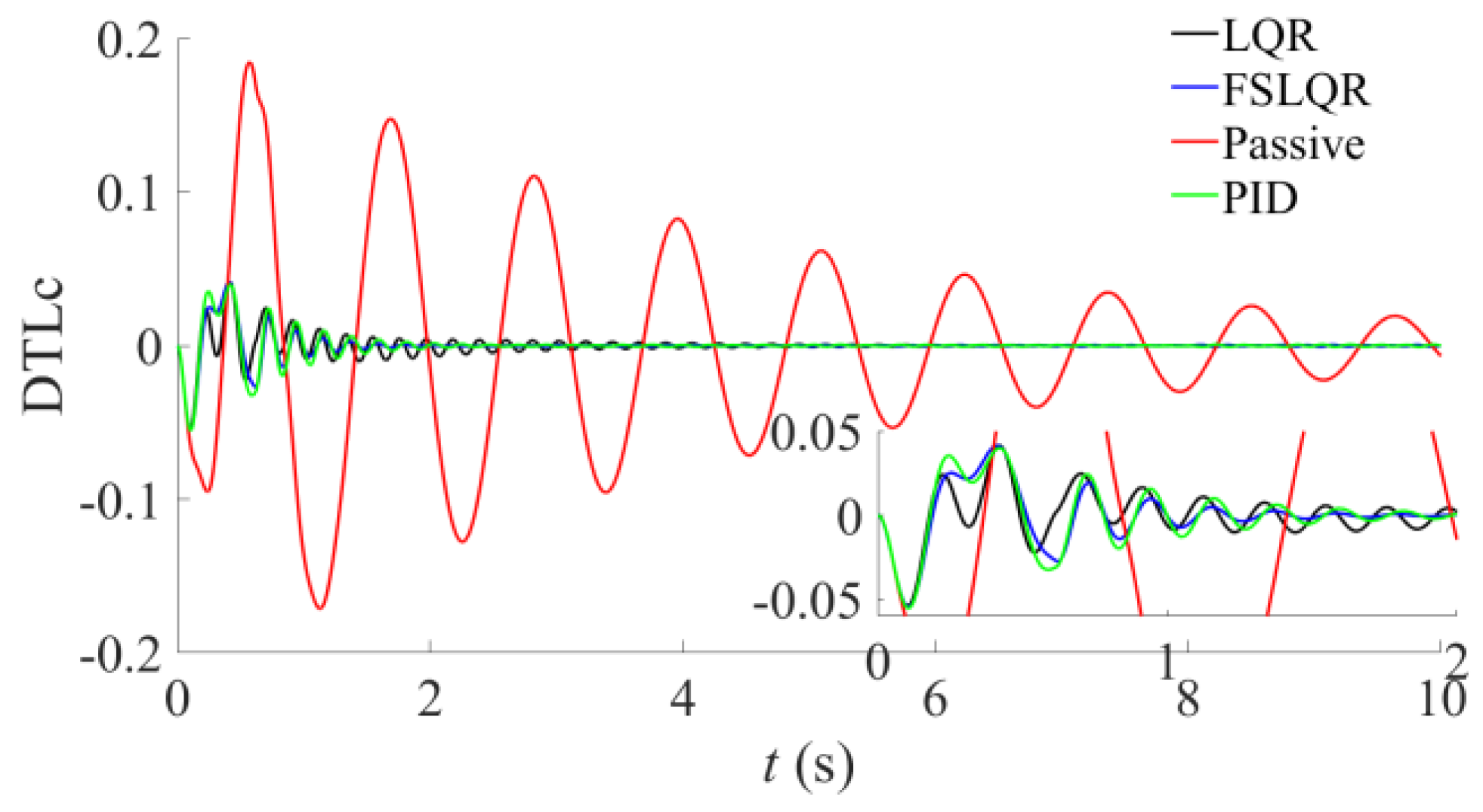
4.1. Impact Excitation
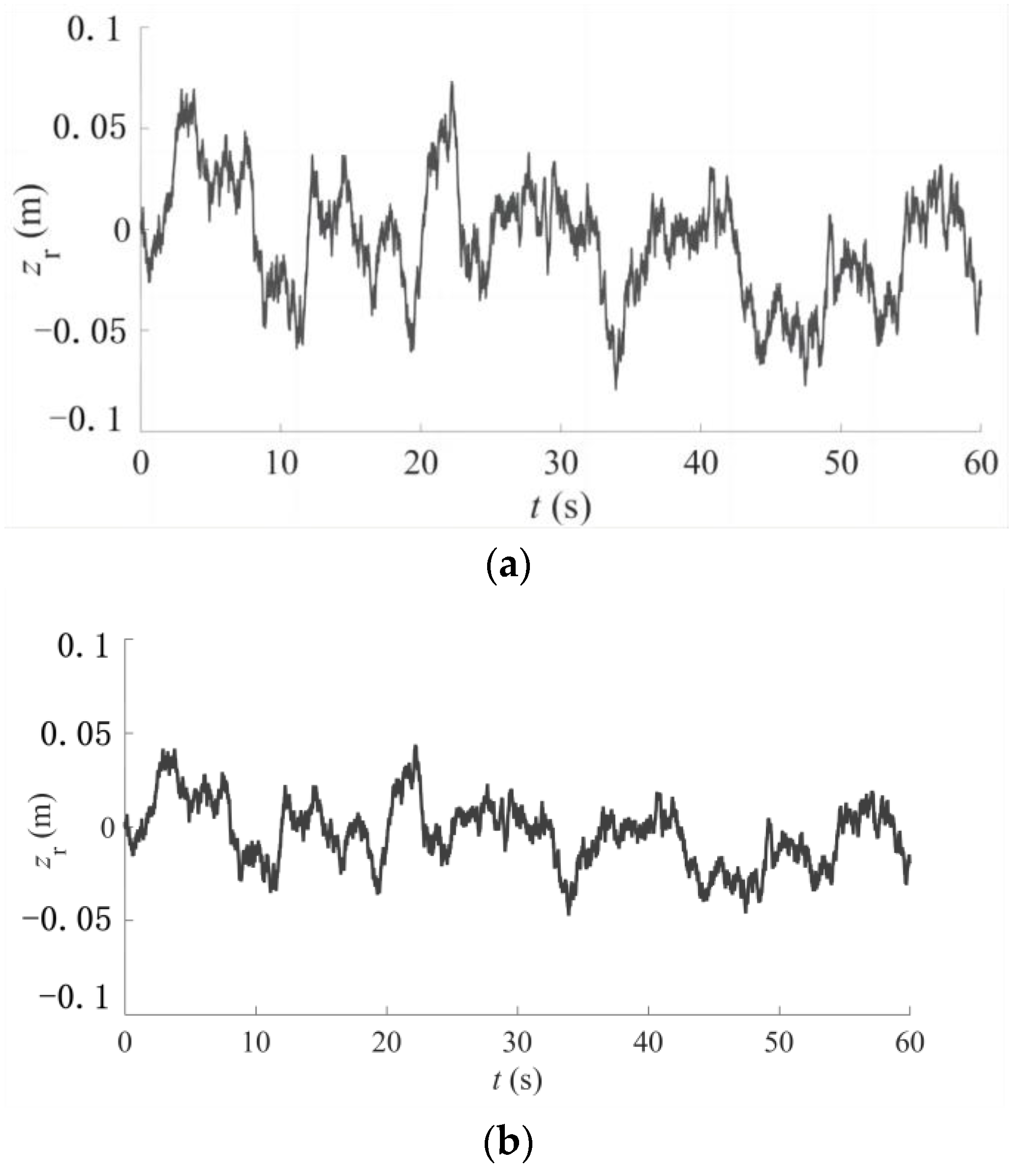
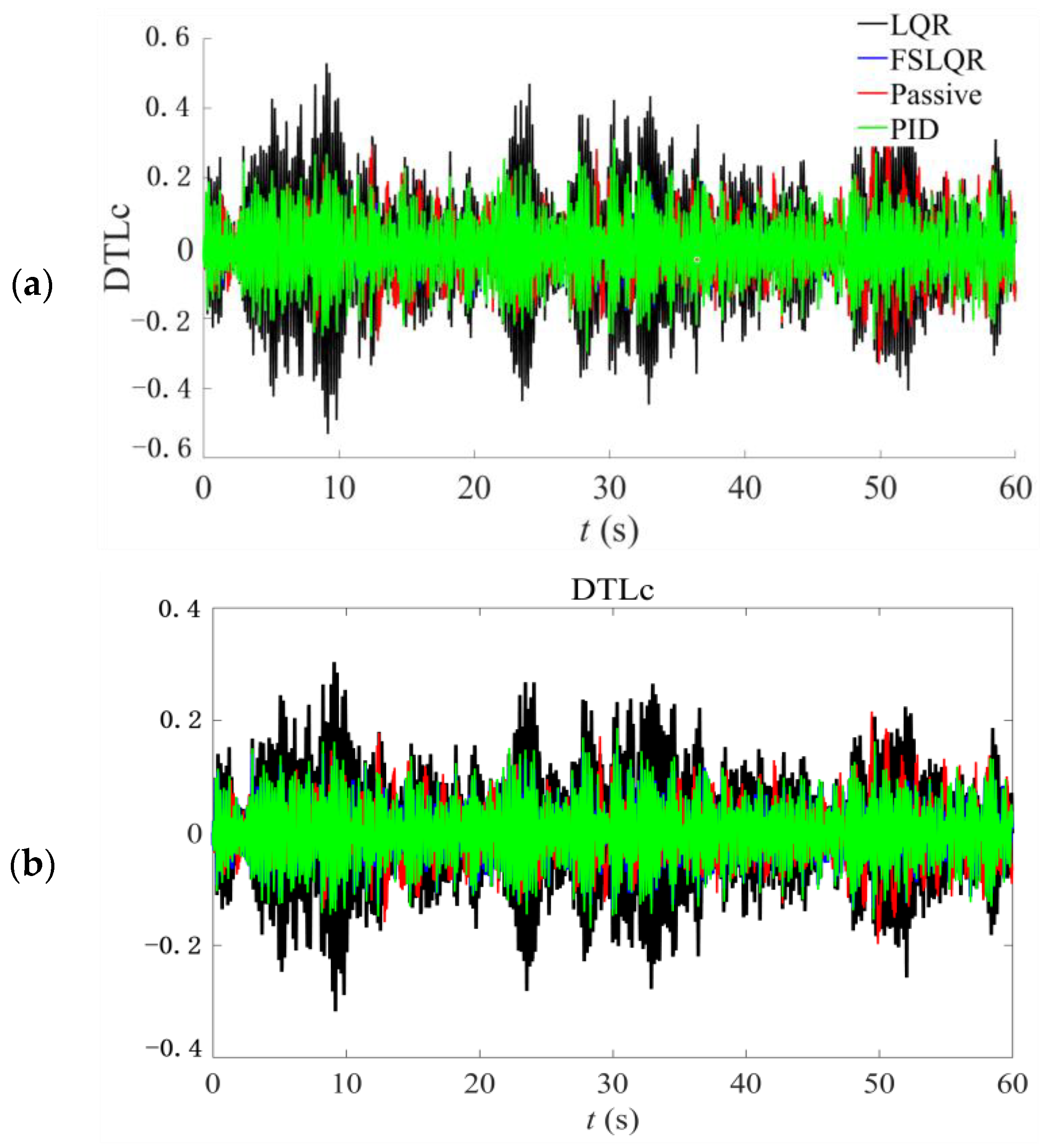
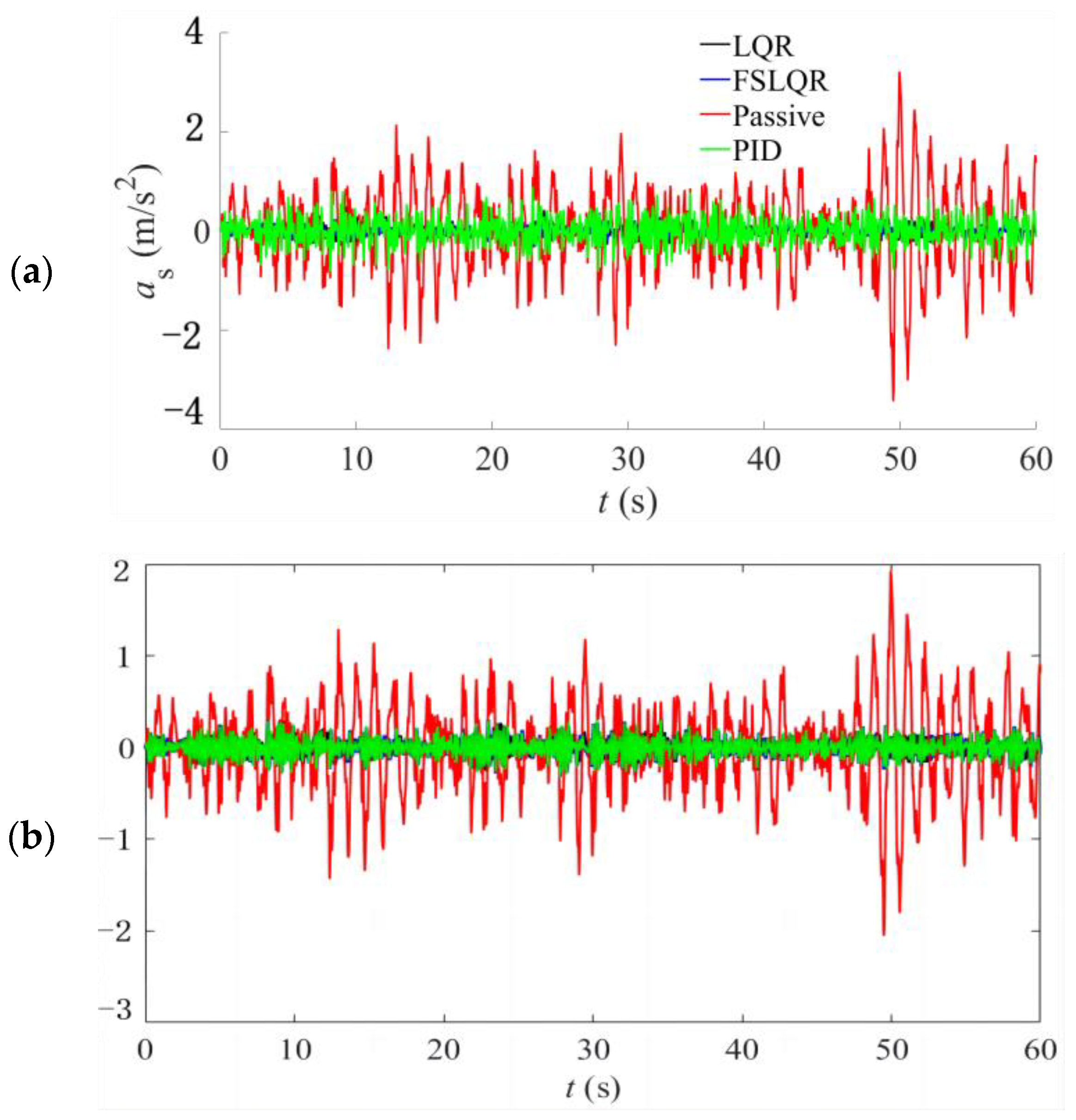
4.2. Random Excitation
4.3. Establishment of Finite State LQR Control System
5. Conclusions
- (1)
- Combining the linear quadratic regulator (LQR), finite sensor arrangement, and modern control theory, a finite state LQR control method is proposed for the application of suspension. Utilizing the information from finite sensors, an optimization model with LQR weight coefficients as design variables is established and linear quadratic optimistic control objective is achieved.
- (2)
- Considering sensor noises and suspension uncertainties, the performance of the FSLQR method is evaluated through simulation comparison among four control methods under impact and random excitation. The results indicated that under impact excitation, full state LQR control, FSLQR control, and PID control have similar response values. However, full state LQR cannot achieve control objectives when the sensor arrangement is limited. Under random excitation, the ride comfort indexes are almost the same for full state LQR, FSLQR, and PID control. However, FSLQR improves DTLc greatly and the deterioration of SWSc is also small, indicating favorable comprehensive control performance.
- (3)
- The proposed FSLQR overcomes the deficiency of the existing methods requiring intermediate states, and thus shows strong practicability. The FSLQR control method makes full use of the existing sensing information and does not need an estimation of unknown states. In this way, the design of the control system is greatly simplified, indicating strong practicability. Meanwhile, the proposed FSLQR control adopts the optimization strategy for the desired simple-formed control law, without massive training like a neural network algorithm. Thus, FSLQR has strong universality and is very suitable for the control system with finite sensing information.
- (4)
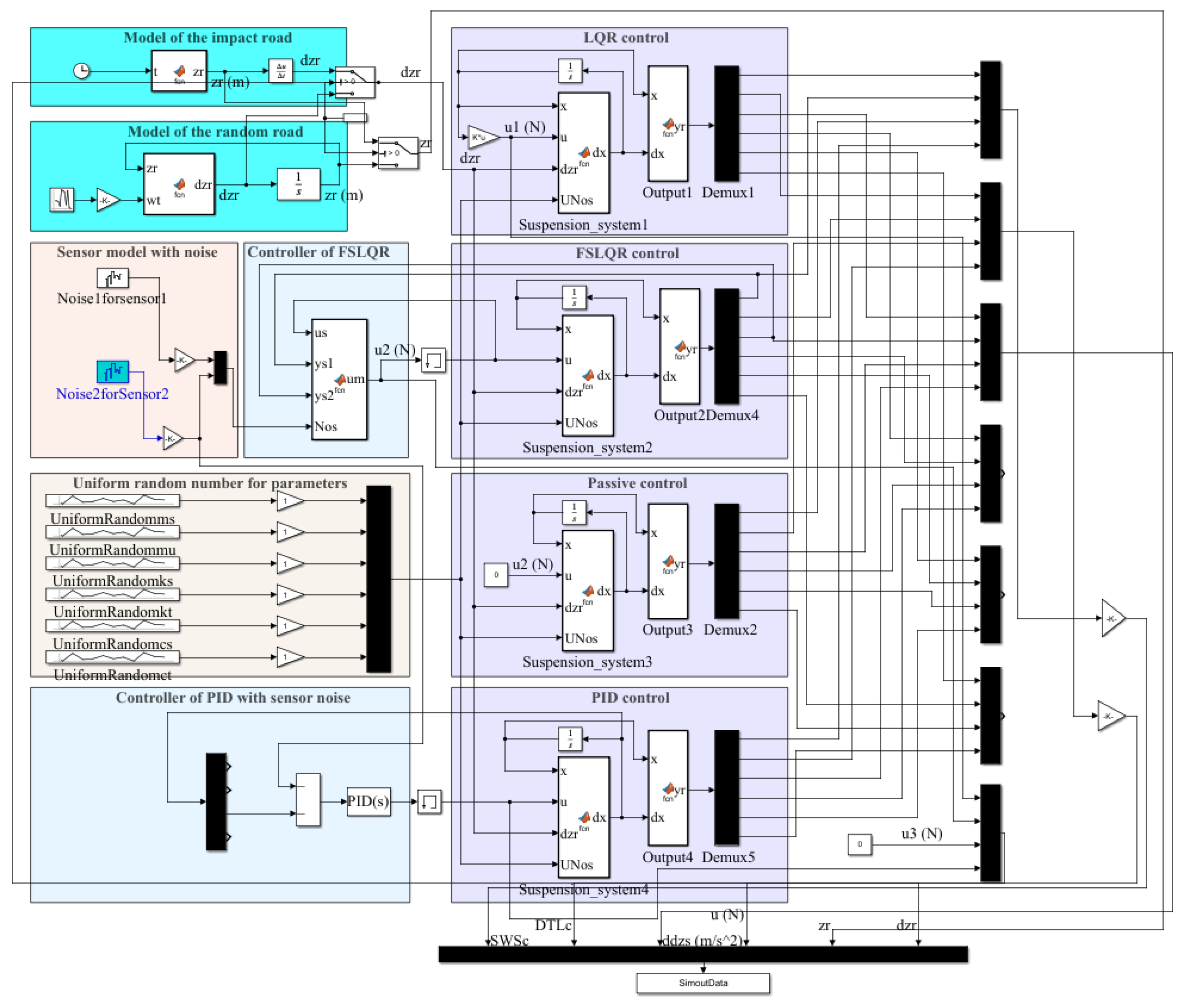
- The “Vehicle Suspension FSLQR Control Simulation System” was developed based on MATALB for the evaluation of suspension systems with uncertainties in different control methods under impact and random excitation as well as suspension uncertainties.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Dong, X.-M.; Yu, M.; Liao, C.-R.; Chen, W.-M. Comparative research on semi-active control strategies for magneto-rheological suspension. Nonlinear Dyn. 2010, 59, 433–453. [Google Scholar] [CrossRef]
- Aboud, W.S.; Haris, S.M.; Yaacob, Y. Advances in the control of mechatronic suspension systems. J. Zhejiang Univ. -Sci. C-Comput. Electron. 2014, 15, 848–860. [Google Scholar] [CrossRef]
- Li, W.; Xie, Z.; Wong, P.K.; Cao, Y.; Hua, X.; Zhao, J. Robust nonfragile H∞ optimum control for active suspension systems with time-varying actuator delay. J. Vib. Control. 2019, 25, 2435–2452. [Google Scholar] [CrossRef]
- Sun, Y.G.; Xu, J.Q.; Chen, C.; Guo-Bin, L. Fuzzy H∞ robust control for magnetic levitation system of maglev vehicles based on TS fuzzy model: Design and experiments. J. Intell. Fuzzy Syst. 2019, 36, 911–922. [Google Scholar] [CrossRef]
- Zhang, Y.; Liu, Y.; Wang, Z.; Bai, R.; Liu, L. Neural networks-based adaptive dynamic surface control for vehicle active suspension systems with time-varying displacement constraints. Neurocomputing 2020, 408, 176–187. [Google Scholar] [CrossRef]
- Wang, G.; Chadli, M.; Basin, M.V. Practical Terminal Sliding Mode Control of Nonlinear Uncertain Active Suspension Systems with Adaptive Disturbance Observer. IEEE/ASME Trans. Mechatronics 2021, 26, 789–797. [Google Scholar] [CrossRef]
- Zhang, J.; Ding, F.; Zhang, B.; Jiang, C.; Du, H.; Li, B. An effective projection-based nonlinear adaptive control strategy for heavy vehicle suspension with hysteretic leaf spring. Nonlinear Dyn. 2020, 100, 451–473. [Google Scholar] [CrossRef]
- Kheloufi, H.; Zemouche, A.; Bedouhene, F.; Boutayeb, M. On LMI conditions to design observer-based controllers for linear systems with parameter uncertainties. Automatica 2013, 49, 3700–3704. [Google Scholar] [CrossRef]
- Wang, Z.; Dong, M.; Qin, Y.; Du, Y.; Zhao, F.; Gu, L. Suspension system state estimation using adaptive Kalman filtering based on road classification. Veh. Syst. Dyn. 2016, 55, 371–398. [Google Scholar] [CrossRef]
- Kim, G.-W.; Kang, S.-W.; Kim, J.-S.; Oh, J.-S. Simultaneous estimation of state and unknown road roughness input for vehicle suspension control system based on discrete Kalman filter. Proc. Inst. Mech. Eng. Part D J. Automob. Eng. 2019, 234, 1610–1622. [Google Scholar] [CrossRef]
- Lin, C.; Liu, W.; Ren, H. State estimation based on unscented Kalman filter for semi-active suspension systems. J. Vibroengineering 2016, 18, 446–457. [Google Scholar]
- Zhang, Z.; Xu, N.; Chen, H.; Wang, Z.; Li, F.; Wang, X. State Observers for Suspension Systems with Interacting Multiple Model Unscented Kalman Filter Subject to Markovian Switching. Int. J. Automot. Technol. 2021, 22, 1459–1473. [Google Scholar] [CrossRef]
- Wang, Z.; Xu, S.; Li, F.; Wang, I.; Yang, J. Integrated Model Predictive Control and Adaptive Unscented Kalman Filter for Semi-Active Suspension System Based on Road Classificatio. In Proceedings of the SAE World Congress Experience, online, 11–14 April 2020. [Google Scholar]
- Xin, W.; Liang, G.; Mingming, D.; Xiaolei, L. Comparative simulation study on two estimation methods and two control strategies for semi-active suspension. Adv. Mech. Eng. 2021, 13, 1–16. [Google Scholar] [CrossRef]
- Hernandez-Alcantara, D.; Amezquita-Brooks, L.; Morales, N.; Juarez-Tamez, O.-A. Velocity Estimation Algorithms for Suspensions. In Proceedings of the 2019 IEEE Global Conference on Signal and Information Processing (GlobalSIP), Ottawa, ON, Canada, 11–14 October 2019. [Google Scholar]
- Wang, T.; Chen, S.; Ren, H.; Zhao, Y. State estimation and damping control for unmanned ground vehicles with semi-active suspension system. Proc. Inst. Mech. Eng. Part D J. Automob. Eng. 2019, 234, 1361–1376. [Google Scholar] [CrossRef]
- Chen, L.; Xu, X.; Liang, C.; Jiang, X.-W.; Wang, F.; Chen, L.; Xu, X.; Liang, C.; Jiang, X.; Wang, F. Semi-active control of a new quasi-zero stiffness air suspension for commercial vehicles based on H2H∞ state feedback. J. Vib. Control. 2022. [Google Scholar] [CrossRef]
- Lin, B.; Su, X.; Li, X. Fuzzy Sliding Mode Control for Active Suspension System with Proportional Differential Sliding Mode Observer. Asian J. Control 2019, 21, 264–276. [Google Scholar] [CrossRef] [Green Version]
- Imine, H.; Madani, T. Heavy vehicle suspension parameters identification and estimation of vertical forces: Experimental results. Int. J. Control 2015, 88, 324–334. [Google Scholar] [CrossRef]
- Attia, T.; Vamvoudakis, K.G.; Kochersberger, K.; Bird, J.; Furukawa, T. Simultaneous dynamic system estimation and optimal control of vehicle active suspension. Veh. Syst. Dyn. 2019, 57, 1467–1493. [Google Scholar] [CrossRef]
- Hu, M.-J.; Park, J.H.; Cheng, J. Robust fuzzy delayed sampled-data control for nonlinear active suspension systems with varying vehicle load and frequency-domain constraint. Nonlinear Dyn. 2021, 105, 2265–2281. [Google Scholar] [CrossRef]
- Li, H.; Jing, X.; Lam, H.-K.; Shi, P. Fuzzy Sampled-Data Control for Uncertain Vehicle Suspension Systems. IEEE Trans. Cybern. 2014, 44, 1111–1126. [Google Scholar]
- Hamersma, H.A.; Els, P.S. Vehicle suspension force and road profile prediction on undulating roads. Veh. Syst. Dyn. 2021, 59, 1616–1642. [Google Scholar] [CrossRef]
- Wang, G.; Qu, W.; Chen, C.; Chen, Z.; Fang, Y. A road level identification method for all-terrain crane based on Support Vector Machine. Measurement 2021, 187, 110319. [Google Scholar] [CrossRef]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Symbol | Value | Unit |
|---|---|---|---|
| Unsprung mass | mu | 110~118 | kg |
| Sprung mass | ms | 950~974 | kg |
| Tire’s stiffness | kt | 101,115 | N/m |
| Tire’s damping | ct | 14.6 | N·s/m |
| Suspension’s stiffness | ks | 42,720 | N/m |
| Suspension’s damping | cs | 1095 | N·s/m |
| Maximum travel | zmax | 100 | mm |
| Parameter | Symbol | Value | Unit |
|---|---|---|---|
| LQR weight coefficients | 2, 1, 5, 0 | — | |
| FSLQR weight coefficients | 1, 9990, 2197, 0 | — | |
| PID controller | Kp, Ki, Kd | 0, 80,000, 0 | N·s/m |
| Time step | h | 0.001 | s |
| Methods | Suspension Dynamic Travel Coefficient | Tire’s Dynamic Load Coefficient | Sprung Mass’s Acceleration (m/s2) | |||
|---|---|---|---|---|---|---|
| Pavement level | C | B | C | B | C | B |
| LQR | 0.2285 | 0.1365 | 0.1537 | 0.0917 | 0.1364 | 0.0819 |
| FSLQR | 0.2240 | 0.1343 | 0.0708 | 0.0421 | 0.1531 | 0.0919 |
| Passive control | 0.1774 | 0.106 | 0.0846 | 0.0505 | 0.8065 | 0.482 |
| PID | 0.1416 | 0.1329 | 0.0531 | 0.0513 | 0.2532 | 0.0968 |
| Methods | Suspension Dynamic Travel Coefficient (%) | Tire’s Dynamic Load Coefficient (%) | Sprung Mass’s Acceleration (%) | |||
|---|---|---|---|---|---|---|
| Pavement level | C | B | C | B | C | B |
| LQR | −28.76 | −28.77 | −81.47 | −81.58 | 83.00 | 83.01 |
| FSLQR | −26.04 | −26.70 | 16.66 | 16.64 | 81.00 | 80.93 |
| Passive control | 0.00 | 0.00 | 0.00 | 0.00 | 0.00 | 0.00 |
| PID | −25.81 | −25.37 | −1.54 | −1.58 | 79.89 | 79.92 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Fu, Q.; Wu, J.; Yu, C.; Feng, T.; Zhang, N.; Zhang, J. Linear Quadratic Optimal Control with the Finite State for Suspension System. Machines 2023, 11, 127. https://doi.org/10.3390/machines11020127
Fu Q, Wu J, Yu C, Feng T, Zhang N, Zhang J. Linear Quadratic Optimal Control with the Finite State for Suspension System. Machines. 2023; 11(2):127. https://doi.org/10.3390/machines11020127
Chicago/Turabian StyleFu, Qidi, Jianwei Wu, Chuanyun Yu, Tao Feng, Ning Zhang, and Jianrun Zhang. 2023. "Linear Quadratic Optimal Control with the Finite State for Suspension System" Machines 11, no. 2: 127. https://doi.org/10.3390/machines11020127
APA StyleFu, Q., Wu, J., Yu, C., Feng, T., Zhang, N., & Zhang, J. (2023). Linear Quadratic Optimal Control with the Finite State for Suspension System. Machines, 11(2), 127. https://doi.org/10.3390/machines11020127