A Coyote Optimization-Based Residual Attention Echo State Reactive Controller for Improving Power Quality in Grid-PV Systems



Abstract
1. Introduction
- Increased power quality
- Minimal switching loss
- Reduced harmonics
- Better compatibility
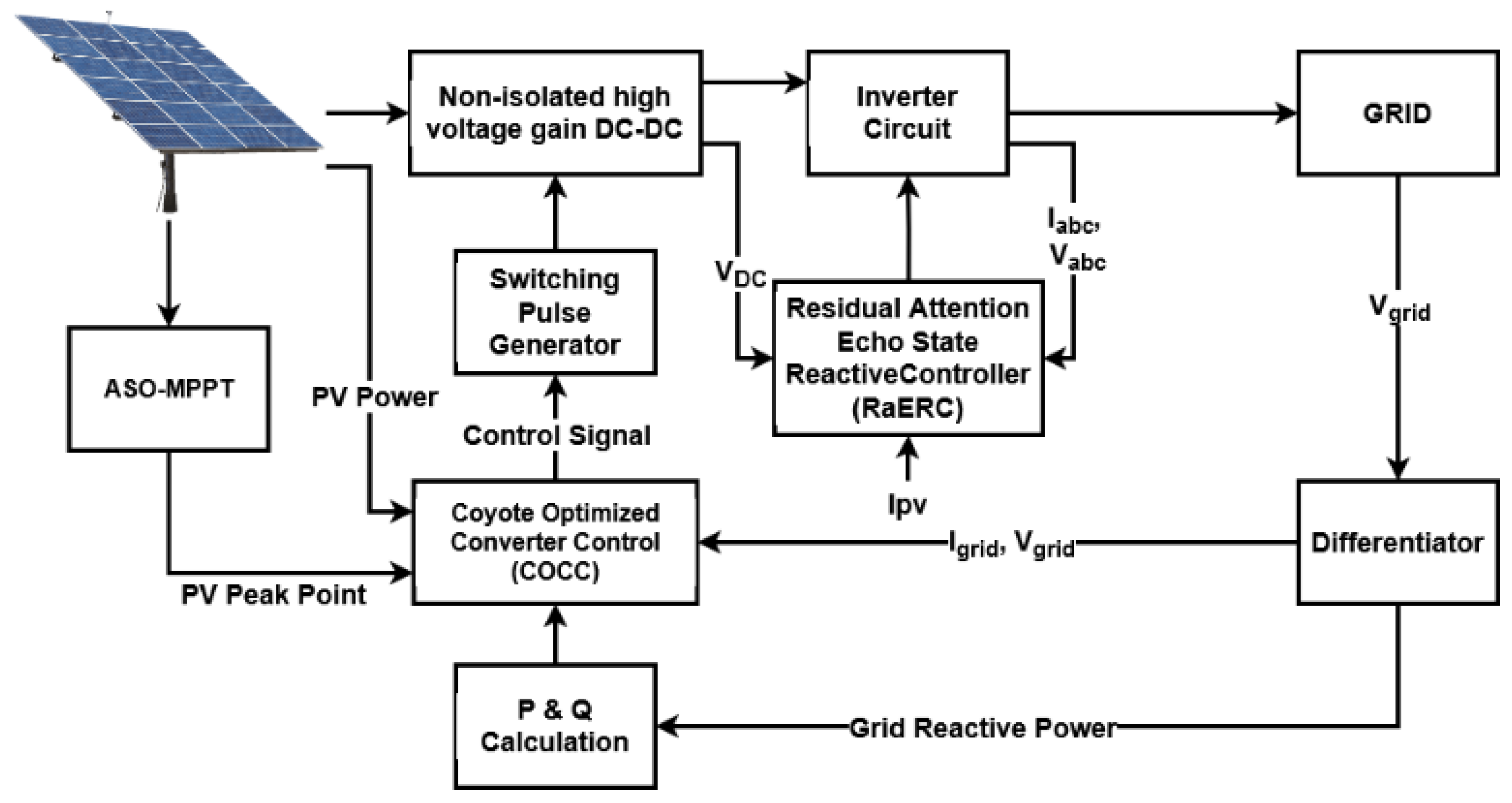
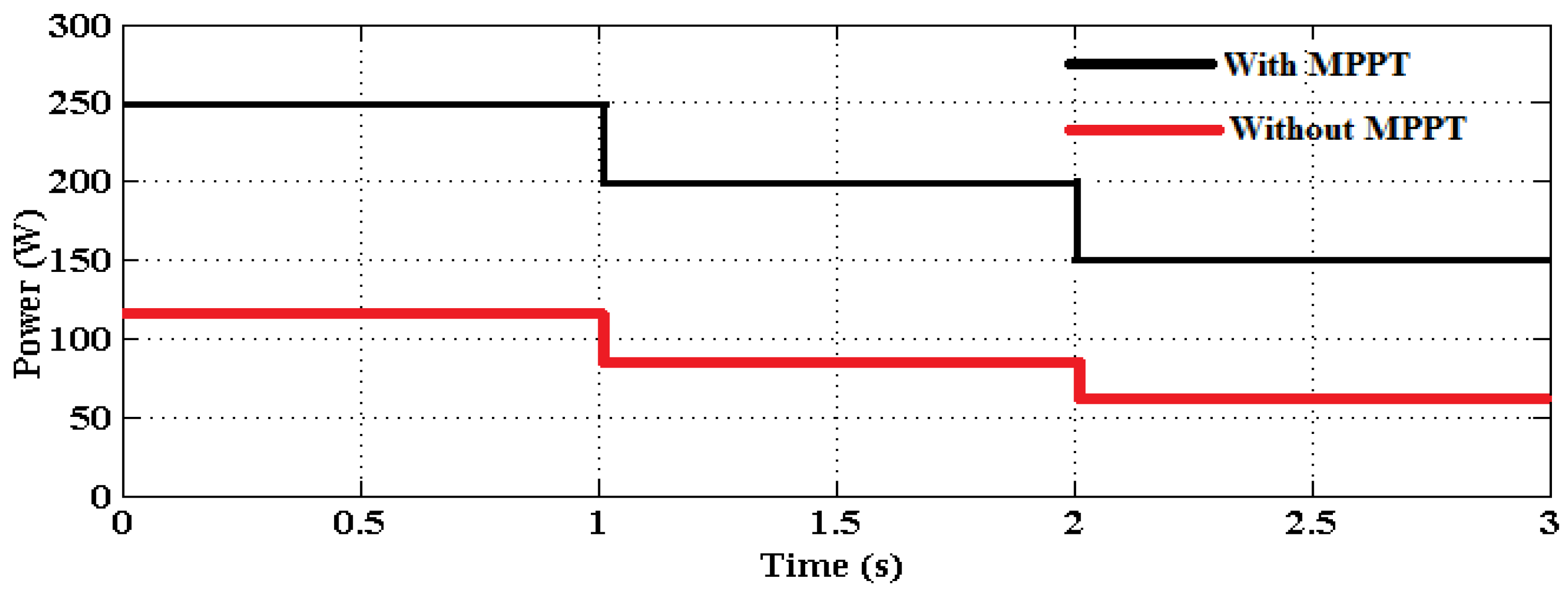
- To extract the maximum possible energy yield from the PV panels, an advanced ATOM search optimization (ASO) based MPPT controlling technique is developed.
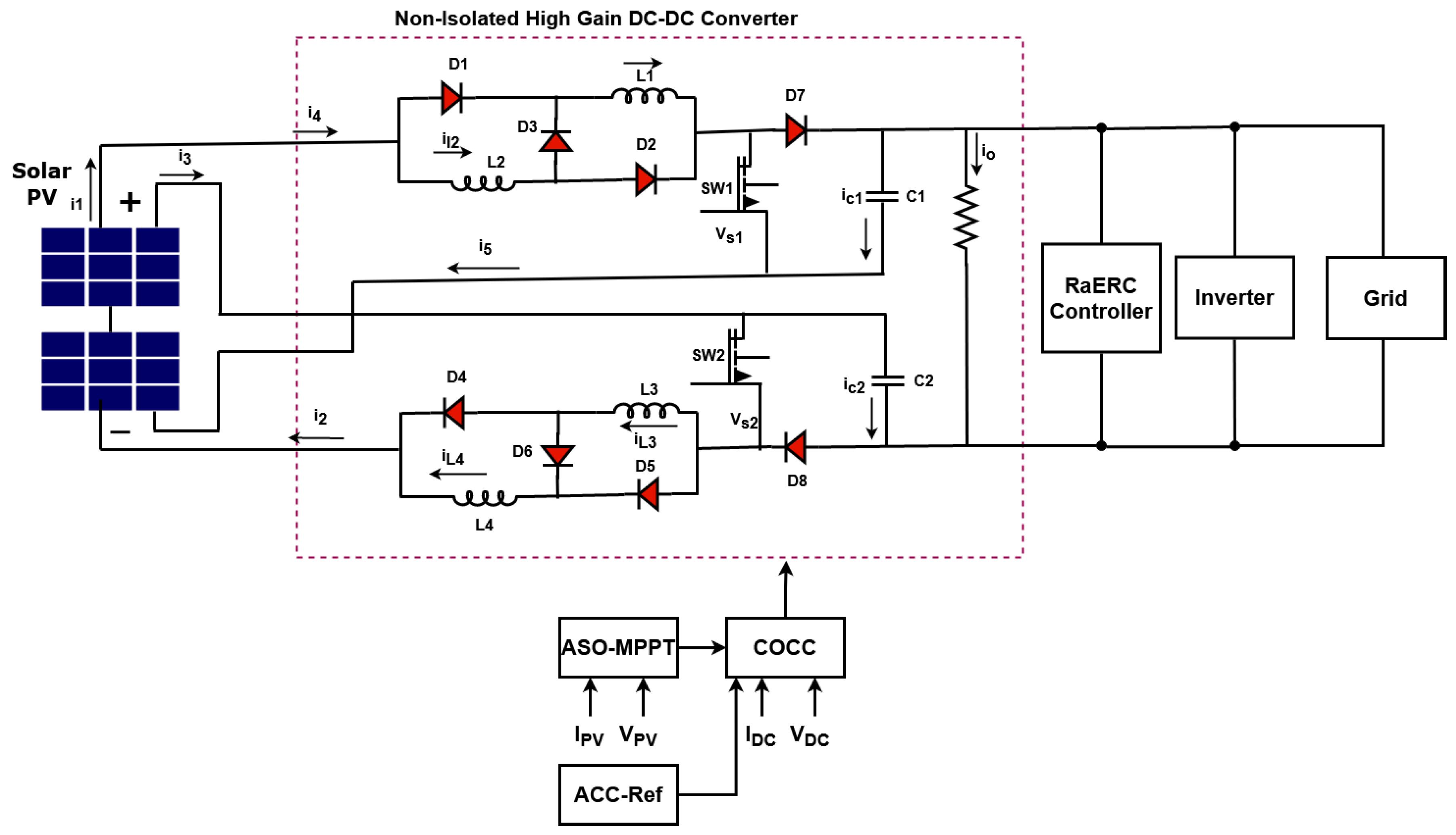
- To efficiently regulate the output PV voltage with reduced switching frequency and losses, a non-isolated high voltage gain DC-DC converter topology has been utilized.
- To generate the controlling signals for operating the converter, a novel coyote optimized converter control (COCC) mechanism is implemented.
- To improve the power quality with better reactive power injection capability, a nine-level inverter topology is used, which is properly operated by using the residual attention echo state reactive controller (RaERC).
- To validate and test simulation results of the proposed COCC-RaERC controlling scheme, an extensive analysis has been performed.
2. Proposed Methodology
- An ATOM search optimization (ASO)-based MPPT controlling algorithm
- Coyote optimized converter control (COCC)
- Residual attention echo state reactive control (RaERC)
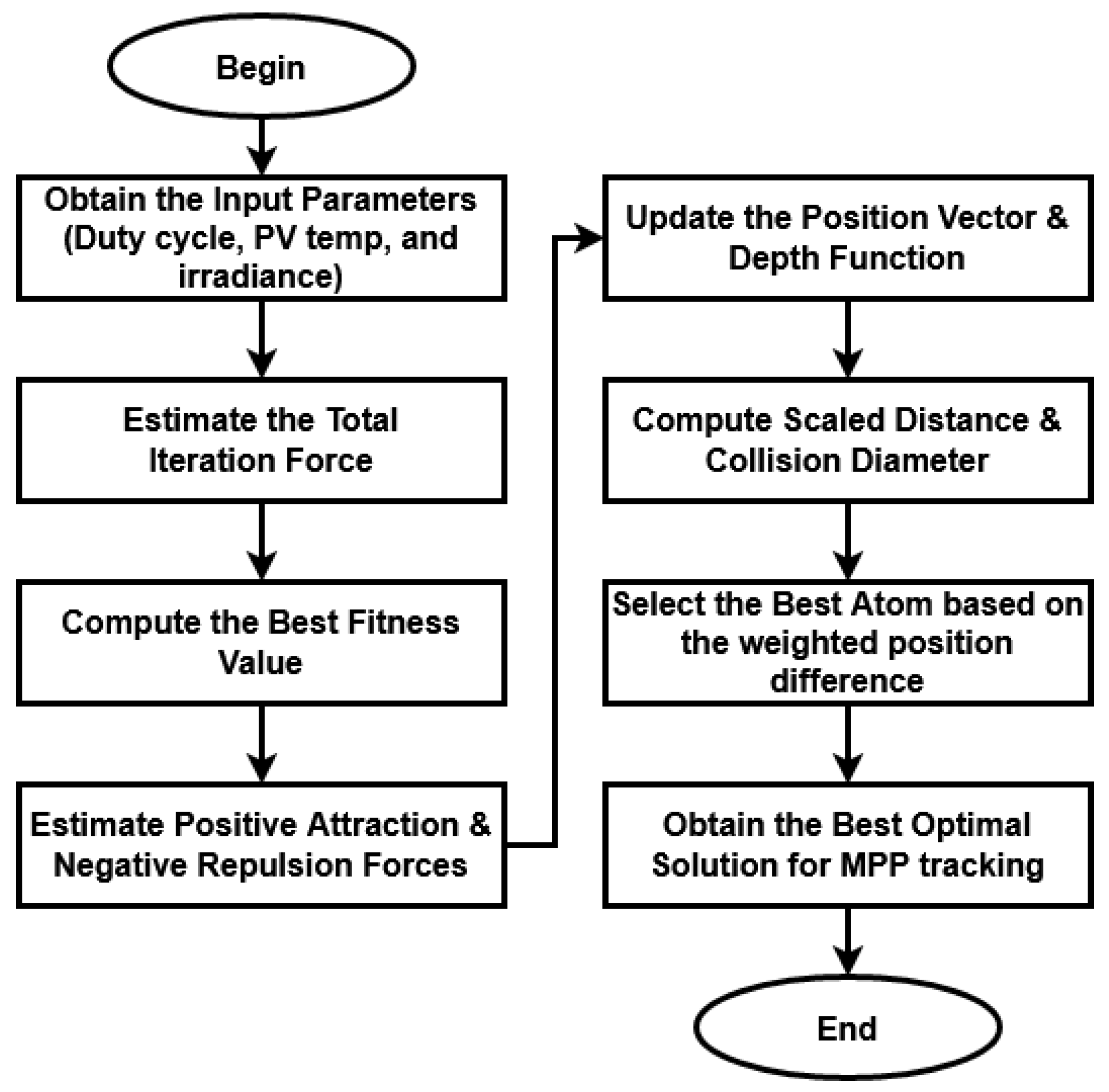
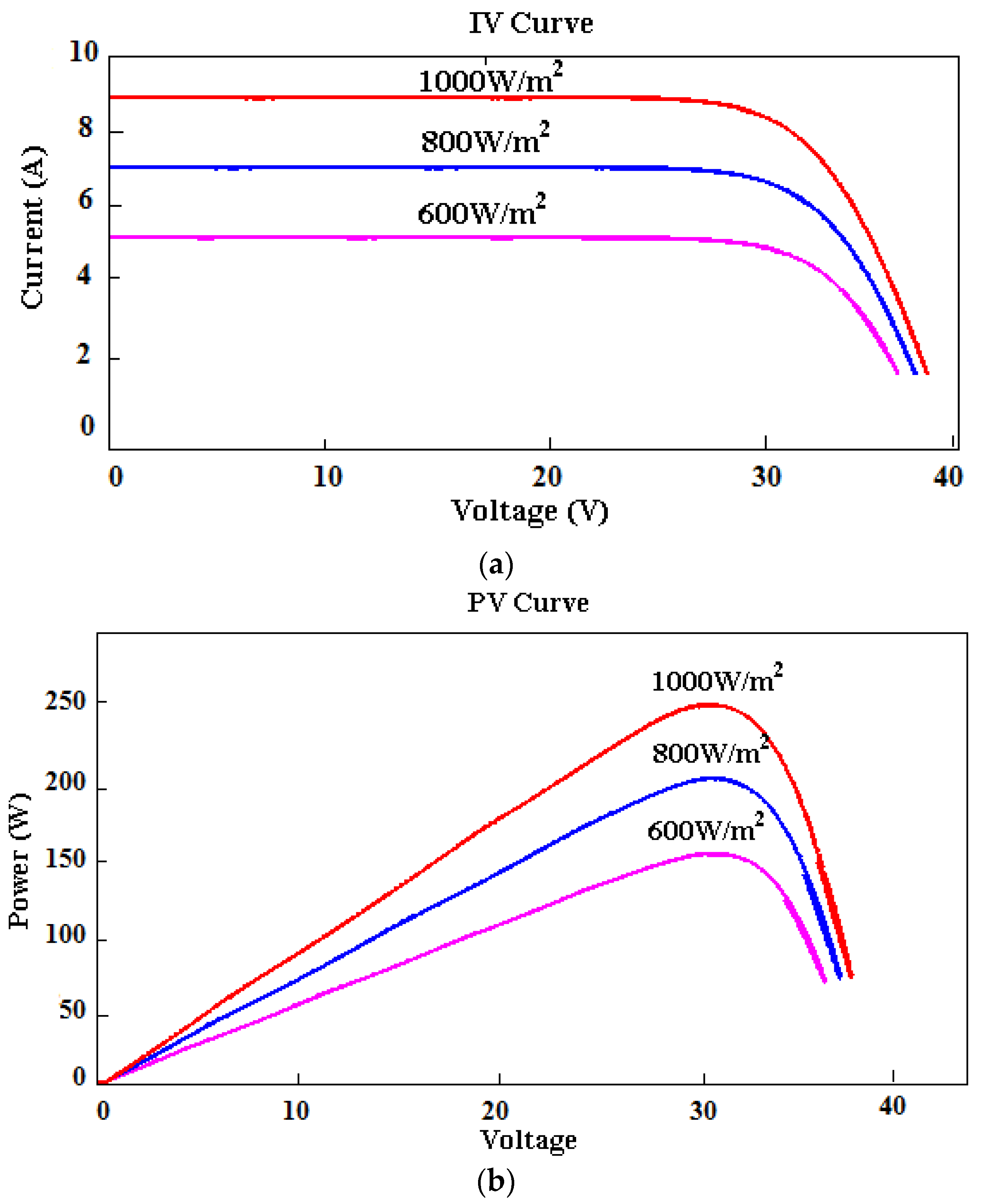
2.1. ASO Based MPPT Controlling
| Algorithm 1: ASO based MPPT Controlling. |
| Input: Initialize Duty cycle DC, cell temperature PVT, solar irradiance SG; Output: Optimal solution; Procedure: Step 1: The total interaction forces acting on the jth atom in mth dimension as shown in Equation (1); Step 2: To make algorithm more exploitation at final iteration, each atom needs to interact as few atoms with better fitness values as computed in Equation (2) Step 3: The interaction force is the gradient of Lennard-Jones (L-J) potential, the revised version of this model with positive attraction and negative repulsion forces as represented in Equation (3) Step 4: The depth function is computed by using Equation (5); Step 5: The scaled distance is estimated between two atoms as shown in Equation (6); Step 6: The relation between the solar panel voltage and duty cycle is estimated by using Equation (7); Step 5: The length scale α(t) is estimated using Equation (8); Step 6: The resulting geometric constraint force is computed using Equation (9); Step 7: The acceleration of the jth atom in mth dimension at iteration t is calculated as represented in Equation (10); Step 8: The relation between the PV current and voltage is estimated as shown in Equation (12); Step 9: Finally, the optimal solution of voltage and current is estimated to obtain the power as represented in Equation (17); |
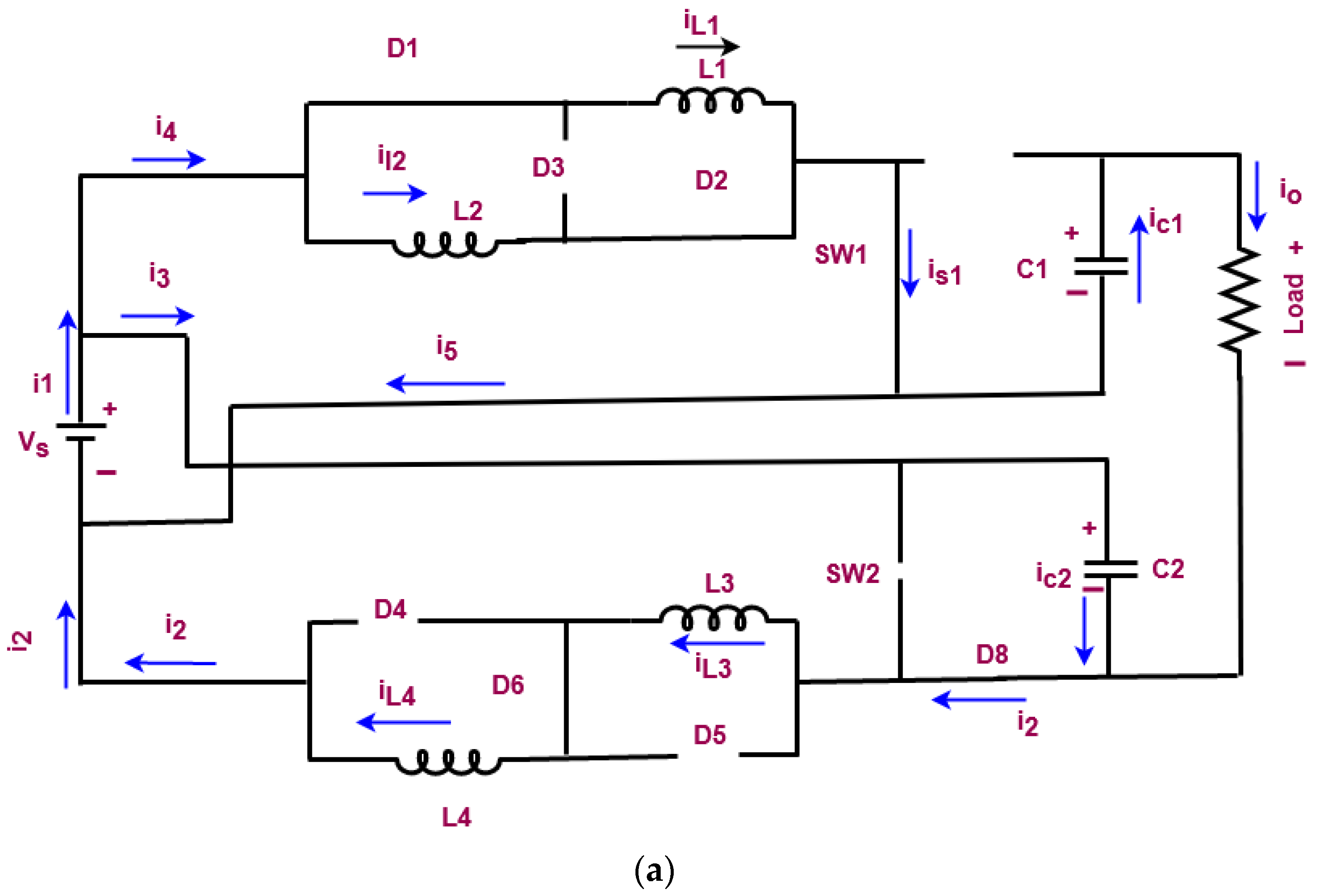
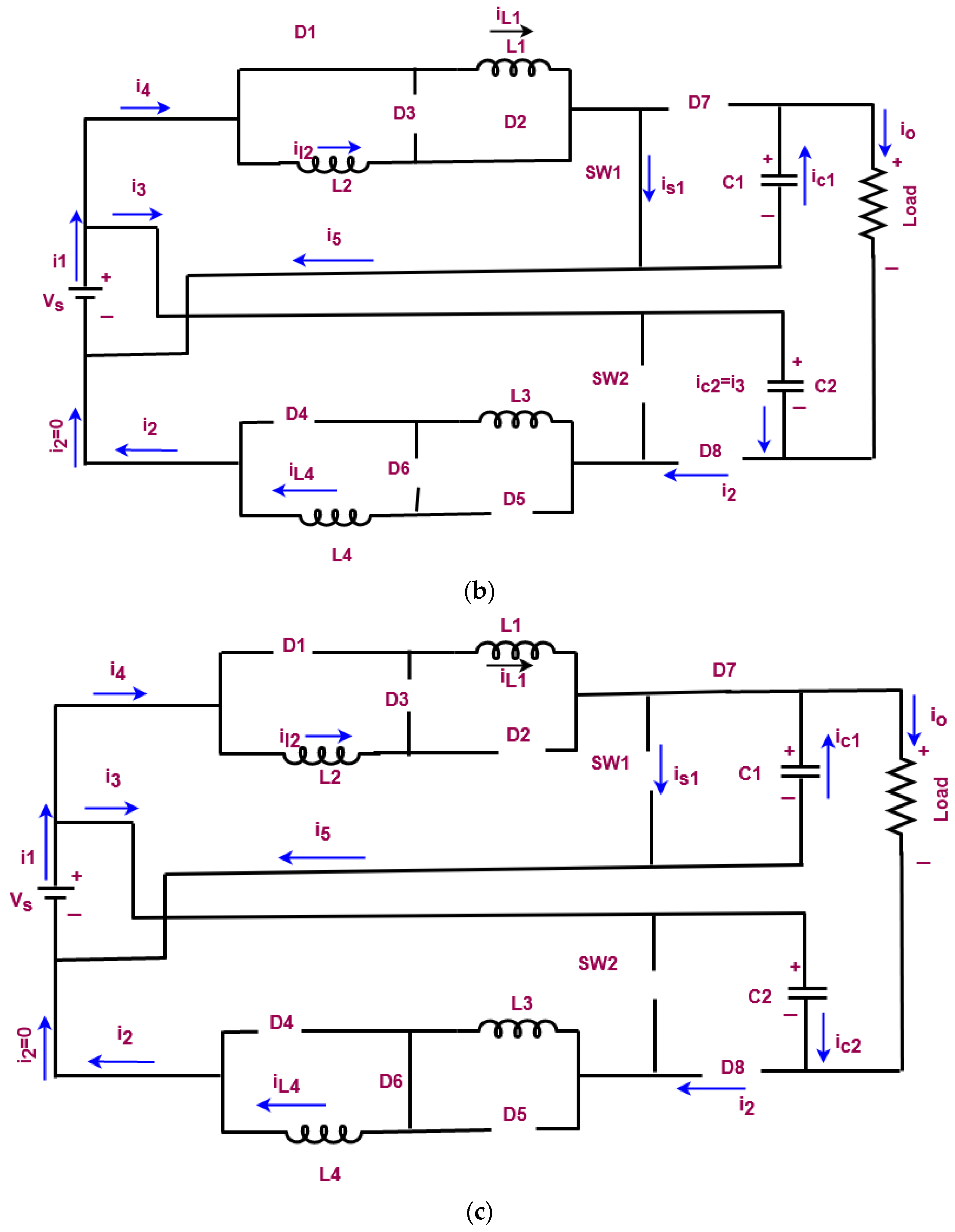
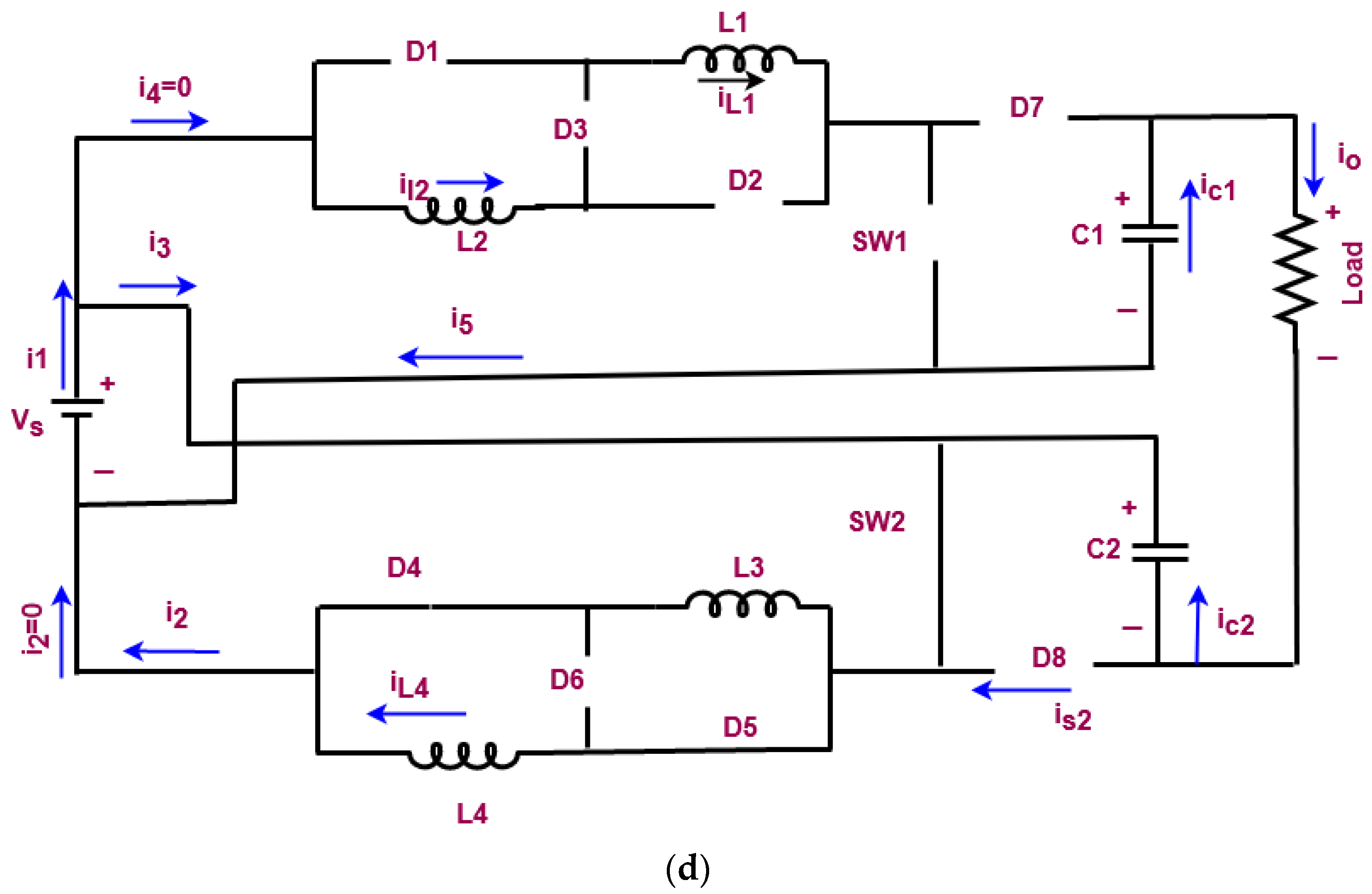
2.2. Non-Isolated High Voltage Gain DC-DC Converter
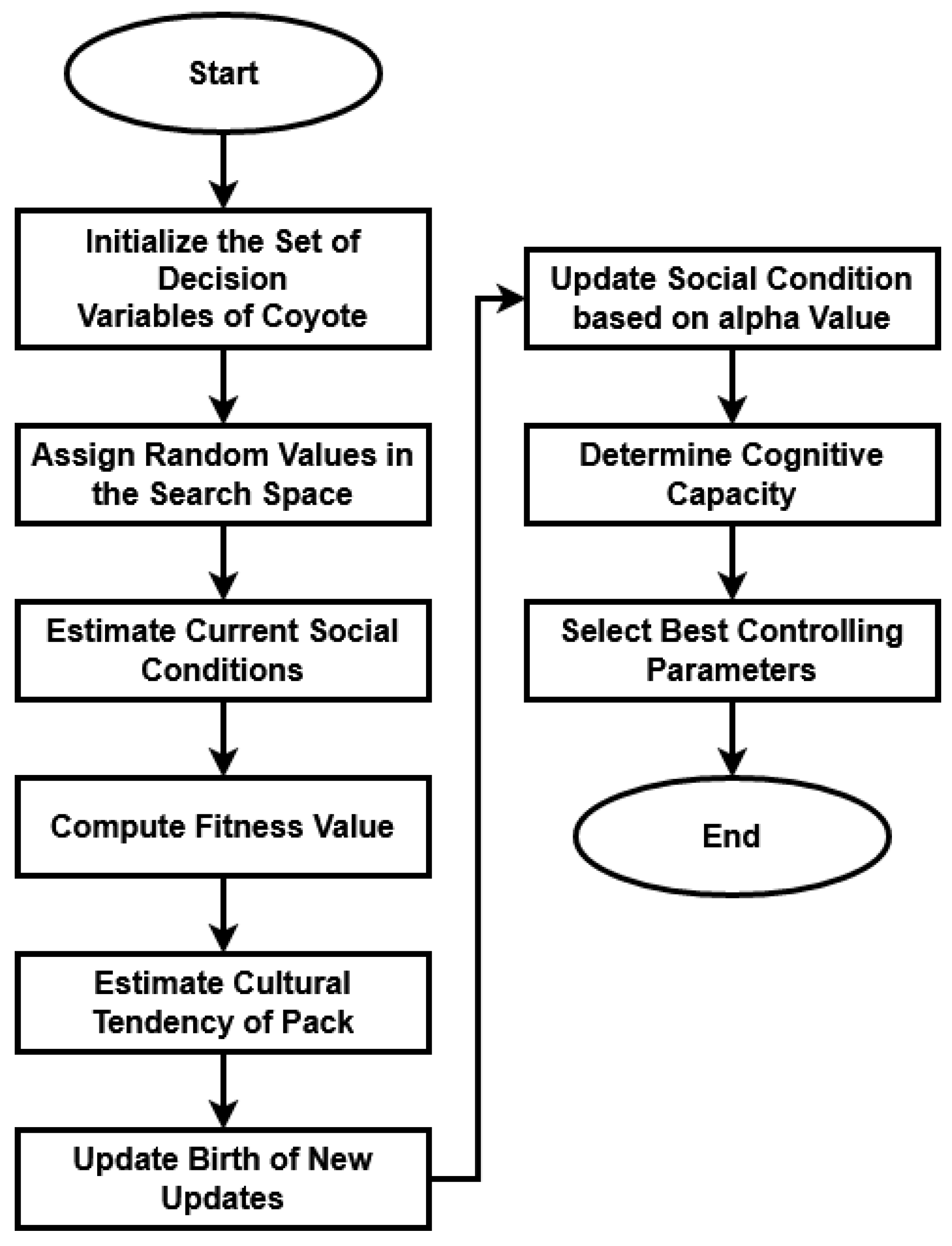
2.3. Coyote Optimized Converter Control (COCC)
| Algorithm 2: Coyote Optimized Converter Control (COCC). |
| Input: Output Voltage PVV, error signal Es and sampling time Tsp; Output: Optimal selection of parameters; Step 1: The social condition SC (set of decision variables) of the coyote of the pack in the t th instant of time is computed by using Equation (18); Sampling Time is estimated by Ts = 1/Fs//Fs − switching frequency Step 2: The random value is assigned inside the searching space for the coyote of the pack in kth dimension by using Equation (19); Step 3: After that, the coyotes’ adaptation in the respective current social conditions are evaluated by using Equation (20); Step 4: The minimization problem is considered in this model, where the alpha of the coyote of the pack in the tth instant of time is estimated by using Equation (21); Step 5: The cultural tendency of the pack is computed based on Equation (22); Step 6: The birth of a new coyotes is updated based on the combination of the social conditions of two parents (randomly chosen) as shown in Equation (23); Step 7: The coyote’s new social condition is updated with the alpha pack influence through Equations (24)–(26); Step 8: The coyote’s cognitive capacity decide if the new social condition is better than the older one to keep it, which is represented in Equation (27); Step 9: Finally, the best controlling parameters kp, ki, kd are selected based on the Equations (28)–(30); |
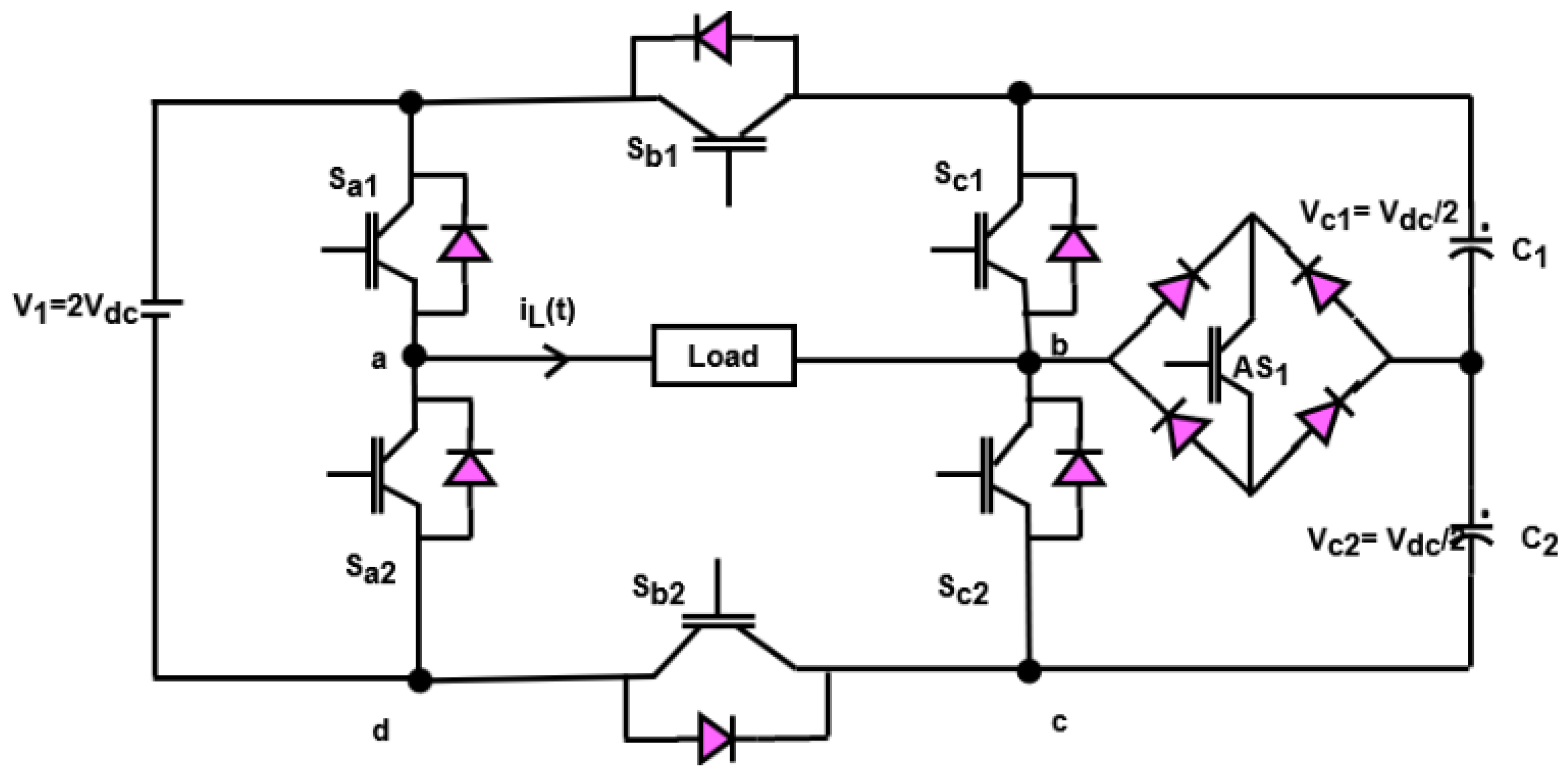
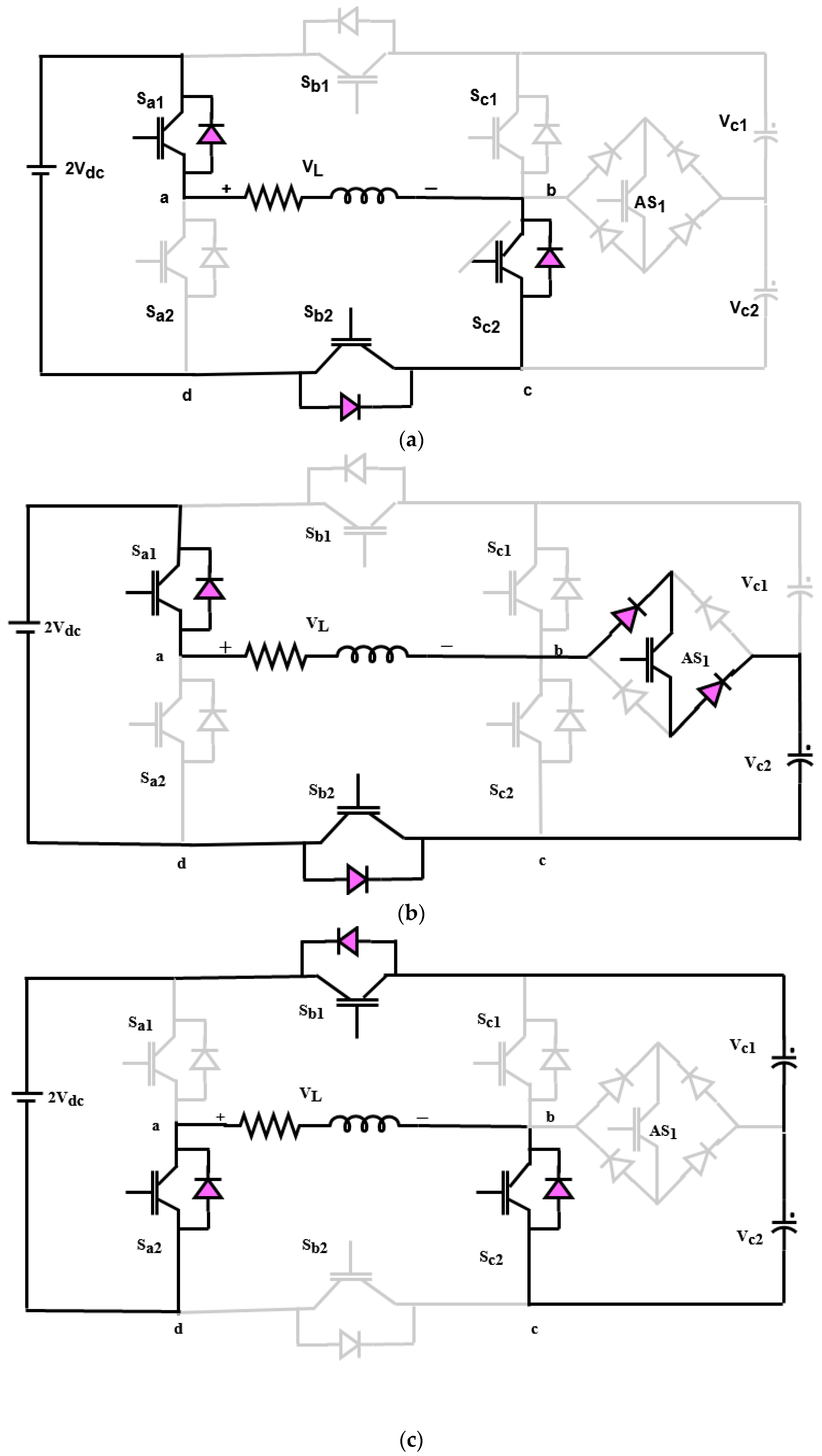
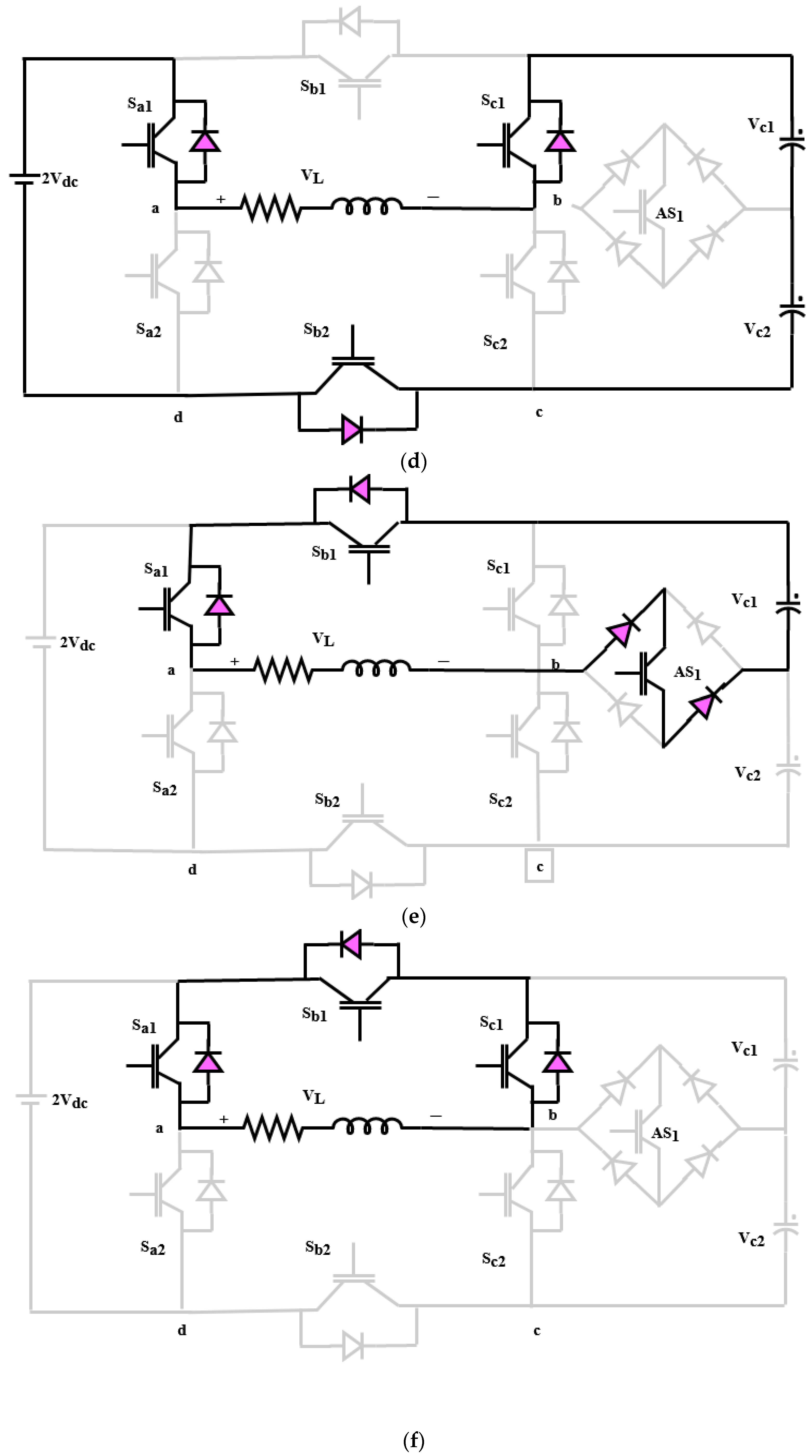
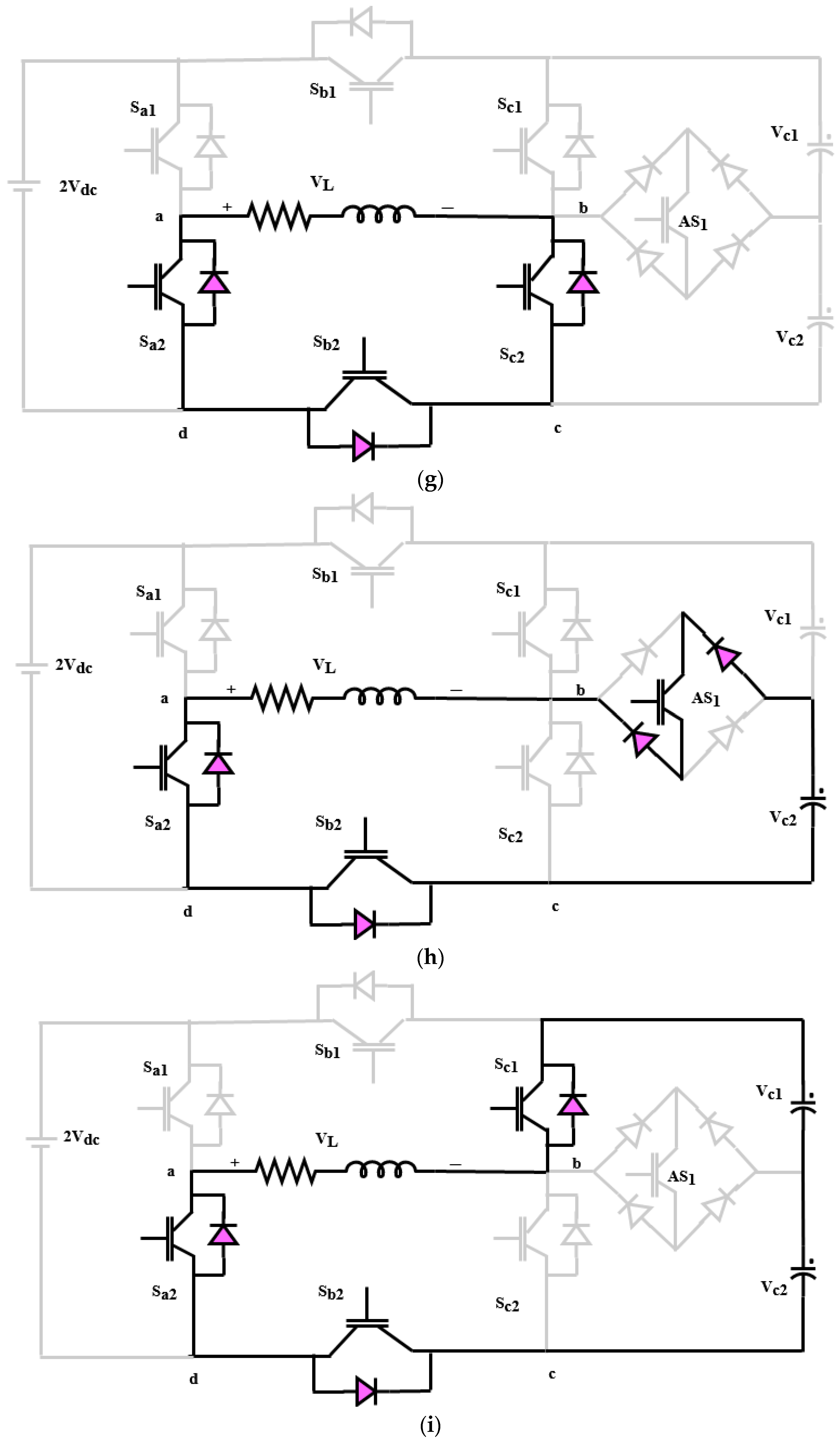
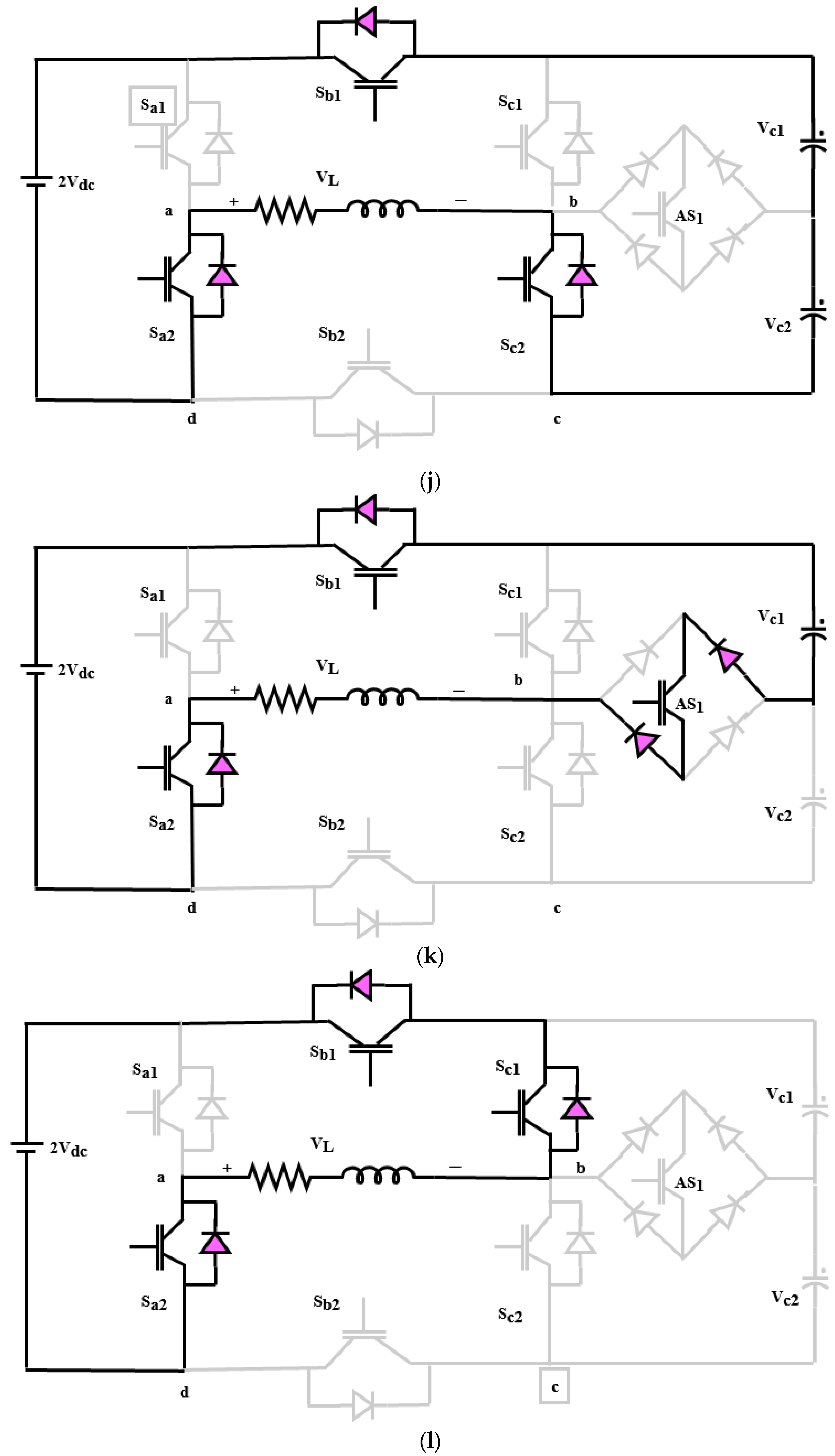
2.4. Nine-Level Inverter
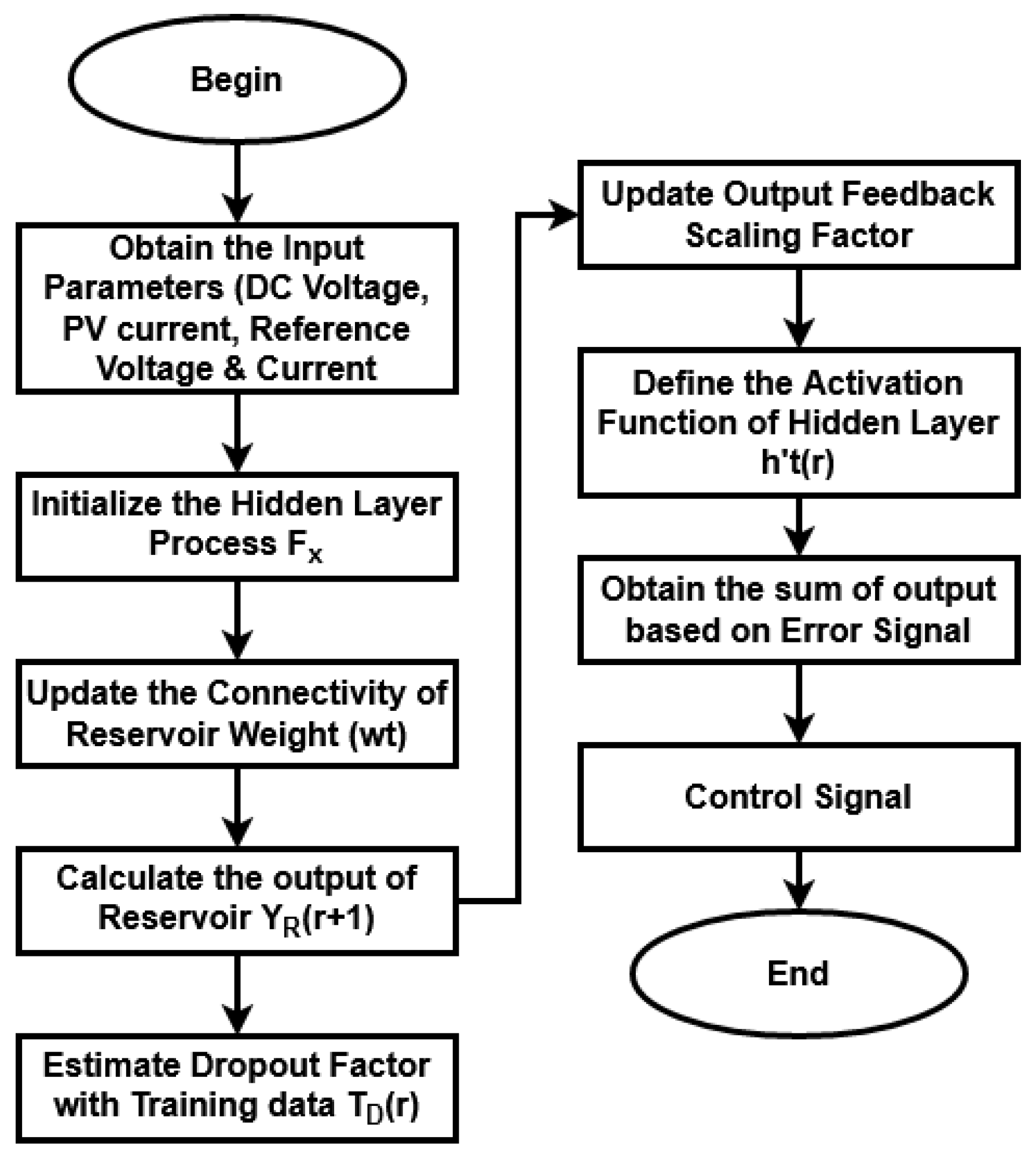
2.5. Hybrid Residual Attention Echo State Reactive Controller (RaERC)
| Algorithm 3: Residual Attention Echo State Reactive Controller (RaERC). |
| Input: DC voltage VDC, PV current IPV, reference voltage VRef and reference current IRef; Output: Control signal; Procedure: Step 1: The dynamic echo state hidden network process is performed by using Equations (40) and (41); Step 2: Then, the connectivity of reservoir weight is formulated with respect to weight matrix as shown in Equation (42); Step 3: The output of reservoir is estimated by using Equation (43): Step 4: Estimate the dropout factor by randomly selecting the neurons for training by using Equation (44); Step 5: Output feedback scaling is updated with forward pass as shown in Equation (45); Step 6: Define the activation function for the hidden layer by using Equation (46); Step 7: The squares’ sum of output is called as the error signal, which is estimated by using Equation (47); Step 8: Return the control signal parameter as the output Pd; |
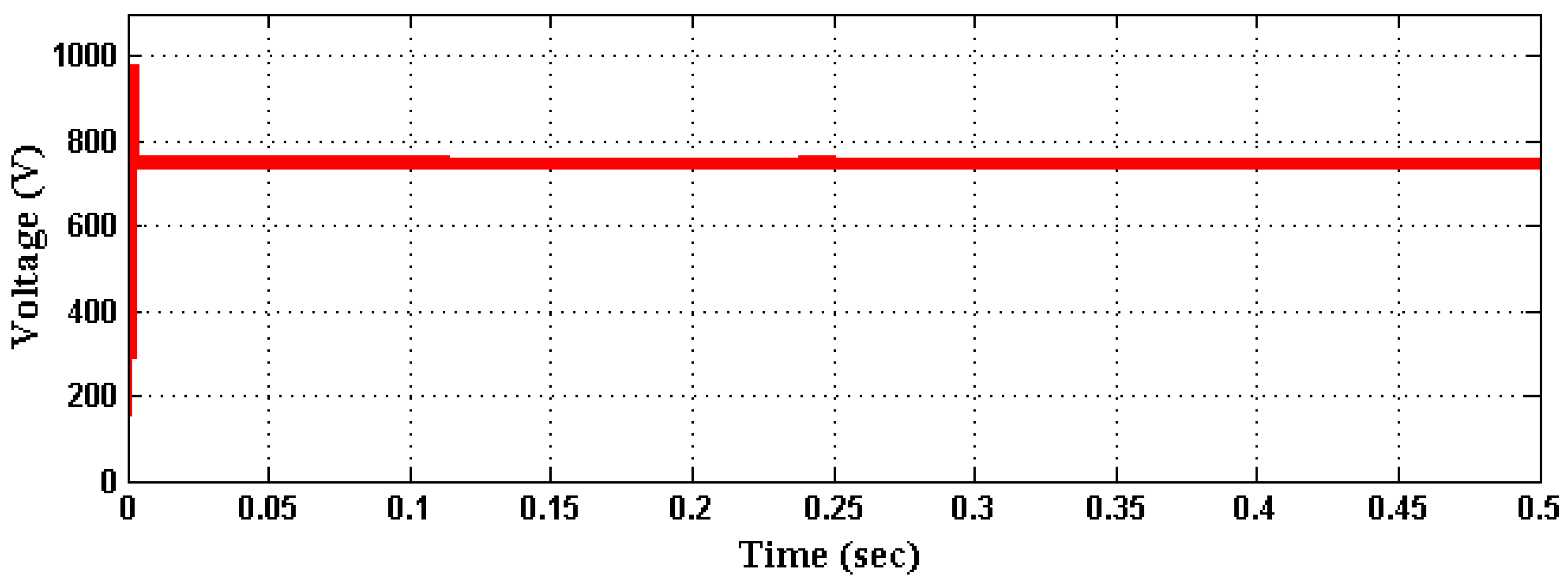
3. Results and Discussion
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Nomenclature
| Symbol | Description |
| Total interaction force | |
| Random number [0 to 1] | |
| Subset of atom population | |
| Total number of atoms in the atomic system | |
| Current iteration | |
| Maximum number of iterations | |
| Depth function | |
| Dynamic parameter | |
| Position distance | |
| Atom | |
| Length scale | |
| Depth weight | |
| Position of best atom | |
| Lagrangian multiplier | |
| Multiplier weight | |
| Mass of atom | |
| Iteration | |
| Electron charge | |
| Short circuit current | |
| Solar irradiance at standard test conditions | |
| Saturation current | |
| Diode current | |
| Ideal factor | |
| Boltzmann constant | |
| Parallel resistance | |
| Diode current |
References
- Eluri, H.; Naik, M.G. Energy Management System and Enhancement of Power Quality with Grid Integrated Micro-Grid using Fuzzy Logic Controller. IJEER 2022, 10, 256–263. [Google Scholar] [CrossRef]
- Nair, D.R.; Nair, M.G.; Thakur, T. A Smart Microgrid System with Artificial Intelligence for Power-Sharing and Power Quality Improvement. Energies 2022, 15, 5409. [Google Scholar] [CrossRef]
- Nagadurga, T.; Narasimham, P.; Vakula, V.; Devarapalli, R. Gray wolf optimization-based optimal grid connected solar photovoltaic system with enhanced power quality features. Concurr. Comput. Pract. Exp. 2022, 34, e6696. [Google Scholar] [CrossRef]
- Tercan, S.M.; Demirci, A.; Gokalp, E.; Cali, U. Maximizing self-consumption rates and power quality towards two-stage evaluation for solar energy and shared energy storage empowered microgrids. J. Energy Storage 2022, 51, 104561. [Google Scholar] [CrossRef]
- Paramasivam, S.K.; Ramu, S.K.; Mani, S.; Muthusamy, S.; Sundararajan, S.C.M.; Panchal, H.; Sadasivuni, K.k. Solar photovoltaic based dynamic voltage restorer with DC-DC boost converter for mitigating power quality issues in single phase grid. Energy Sources Part A Recovery Util. Environ. Eff. 2022, 44, 91–115. [Google Scholar] [CrossRef]
- Andela, M.; Shaik, A.; Beemagoni, S.; Kurimilla, V.; Veramalla, R.; Kodakkal, A.; Salkuti, S.R. Solar photovoltaic system-based reduced switch multilevel inverter for improved power quality. Clean Technol. 2022, 4, 1–13. [Google Scholar] [CrossRef]
- Kumar, R. Fuzzy particle swarm optimization control algorithm implementation in photovoltaic integrated shunt active power filter for power quality improvement using hardware-in-the-loop. Sustain. Energy Technol. Assess. 2022, 50, 101820. [Google Scholar] [CrossRef]
- Salem, W.; Gabr Ibrahim, W.; Abdelsadek, A.M.; Nafeh, A. Grid connected photovoltaic system impression on power quality of low voltage distribution system. Cogent Eng. 2022, 9, 2044576. [Google Scholar] [CrossRef]
- Gupta, A. Power quality evaluation of photovoltaic grid interfaced cascaded H-bridge nine-level multilevel inverter systems using D-STATCOM and UPQC. Energy 2022, 238, 121707. [Google Scholar] [CrossRef]
- Das, B.; Panigrahi, P.K.; Das, S.R.; Mishra, D.P.; Salkuti, S.R. Power quality improvement in a photovoltaic based microgrid integrated network using multilevel inverter. Int. J. Emerg. Electr. Power Syst. 2022, 23, 197–209. [Google Scholar] [CrossRef]
- Alqarni, Z.A. Design of Active Fault-Tolerant Control System for Multilevel Inverters to Achieve Greater Reliability With Improved Power Quality. IEEE Access 2022, 10, 77791–77801. [Google Scholar] [CrossRef]
- Ahmad, S.; Iqbal, A.; Ashraf, I.; Meraj, M. Improved power quality operation of symmetrical and asymmetrical multilevel inverter using invasive weed optimization technique. Energy Rep. 2022, 8, 3323–3336. [Google Scholar] [CrossRef]
- Bughneda, A.; Salem, M.; Richelli, A.; Ishak, D.; Alatai, S. Review of multilevel inverters for PV energy system applications. Energies 2021, 14, 1585. [Google Scholar] [CrossRef]
- Kulkarni, J.; Yadav, S.K.; Singh, B.; Kumar, N. Power quality investigation of CHB nine-level converter based large-scale solar PV system with different modulation schemes. Energy Convers. Econ. 2021, 2, 145–156. [Google Scholar] [CrossRef]
- Upreti, S.; Yadav, S.K.; Singh, B.; Kumar, N. New Multicarrier Modulation Scheme for Harmonics Mitigation of T-Type Solar Multilevel Inverter. J. Inst. Eng. Ser. B 2022, 103, 903–911. [Google Scholar] [CrossRef]
- Maheswari, K.; Bharanikumar, R.; Arjun, V.; Amrish, R.; Bhuvanesh, M. A comprehensive review on cascaded H-bridge multilevel inverter for medium voltage high power applications. Mater. Today Proc. 2021, 45, 2666–2670. [Google Scholar] [CrossRef]
- Yadav, S.K.; Mishra, N.; Singh, B. Optimal third harmonic injection based nearest level control of large-scale solar photovoltaic multilevel converter. Energy Convers. Econ. 2022, 3, 61–71. [Google Scholar] [CrossRef]
- Vanaja, D.S.; Stonier, A.A.; Mani, G.; Murugesan, S. Investigation and validation of solar photovoltaic-fed modular multilevel inverter for marine water-pumping applications. Electr. Eng. 2022, 104, 1163–1178. [Google Scholar] [CrossRef]
- Srinivasan, S.; Muthubalaji, S.; Devadasu, G.; Anand, R. Bat algorithm based selective harmonic elimination PWM for an eleven level inverter. Int. J. Recent Technol. Eng. 2019, 8, 1164–1169. [Google Scholar]
- Patra, B.; Nema, P. Analysis of Solar Integrated Multilevel Inverter for Smart Grid Power Filters. In Proceedings of the 2021 International Conference on Advances in Electrical, Computing, Communication and Sustainable Technologies (ICAECT), Bhilai, India, 19–20 February 2021; pp. 1–5. [Google Scholar]
- Yadav, S.K.; Mishra, N.; Singh, B. Multilevel Converter with Nearest Level Control for Integrating Solar Photovoltaic System. IEEE Trans. Ind. Appl. 2022, 58, 5117–5126. [Google Scholar] [CrossRef]
- Upreti, S.; Singh, B.; Kumar, N. Harmonics Minimization in PUC Type Solar Multilevel Converter with Multicarrier Switching Schemes. IETE J. Res. 2022, 1–10. [Google Scholar] [CrossRef]
- Sidhartha, P.; Muthubalaji, S.; Devadas, G. Fuzzy Pi Controller Based Single Phase Hybrid Inverter for Domestic Applications. Int. J. Eng. Adv. Technol. (IJEAT) ISSN 2019, 9, 2249–8958. [Google Scholar] [CrossRef]
- Shunmugham Vanaja, D.; Stonier, A.A.; Moghassemi, A. A novel control topology for grid-integration with modular multilevel inverter. Int. Trans. Electr. Energy Syst. 2021, 31, e13135. [Google Scholar] [CrossRef]
- Tariq, M.; Zaheer, H.; Mahmood, T. Modeling and Analysis of STATCOM for Renewable Energy Farm to Improve Power Quality and Reactive Power Compensation. Eng. Proc. 2021, 12, 44. [Google Scholar]
- Jamil, H.; Qayyum, F.; Iqbal, N.; Kim, D.-H. Enhanced Harmonics Reactive Power Control Strategy Based on Multilevel Inverter Using ML-FFNN for Dynamic Power Load Management in Microgrid. Sensors 2022, 22, 6402. [Google Scholar] [CrossRef]
- Varma, P.R.; Mukundan, C.N.; Jayaprakash, P.; Al Durra, A.; El-Fouly, T. High Gain Multilevel Inverter Based Grid Integrated Solar Power Transfer System with Power Quality Enhancement. In Proceedings of the IECON 2021–47th Annual Conference of the IEEE Industrial Electronics Society, Toronto, ON, Canada, 13–16 October 2021; pp. 1–6. [Google Scholar]
- Wu, F.; Wu, H.; Song, L. A New Multilevel Converter Applied to Photovoltaic Grid-connected system. In Proceedings of the 2020 5th Asia Conference on Power and Electrical Engineering (ACPEE), Chengdu, China, 4–7 June 2020; pp. 1250–1254. [Google Scholar]
- Das, S.R.; Ray, P.K.; Mishra, A.K.; Mohanty, A. Performance of PV integrated multilevel inverter for PQ enhancement. Int. J. Electron. 2021, 108, 945–982. [Google Scholar] [CrossRef]
- Lenka, R.K.; Panda, A.K.; Patel, R.; Guerrero, J. PV Integrated Multifunctional Off-Board EV Charger with Improved Grid Power Quality. IEEE Trans. Ind. Appl. 2022, 58, 5520–5532. [Google Scholar] [CrossRef]
- Stonier, A.A.; Murugesan, S.; Samikannu, R.; Venkatachary, S.K.; Kumar, S.S.; Arumugam, P. Power quality improvement in solar fed cascaded multilevel inverter with output voltage regulation techniques. IEEE Access 2020, 8, 178360–178371. [Google Scholar] [CrossRef]
- Prasad, D.; Dhanamjayulu, C. Solar PV-fed multilevel inverter with series compensator for power quality improvement in grid-connected systems. IEEE Access 2022, 10, 81203–81219. [Google Scholar] [CrossRef]
- Samal, S.; Hota, P.K.; Barik, P.K. Power quality assessment of a solar PV and fuel cell-based distributed generation system using unified power quality conditioner. Int. J. Ambient Energy 2022, 43, 3294–3304. [Google Scholar] [CrossRef]
- Dhineshkumar, K.; Subramani, C.; Geetha, A.; Vimala, C. Performance analysis of PV powered multilevel inverter. Int. J. Electr. Comput. Eng. 2019, 9, 753. [Google Scholar] [CrossRef]
- Srinivasan, G.K.; Rivera, M.; Loganathan, V.; Ravikumar, D.; Mohan, B. Trends and challenges in multi-level inverter with reduced switches. Electronics 2021, 10, 368. [Google Scholar] [CrossRef]
- Hassan, A.; Yang, X.; Chen, W.; Houran, M.A. A state of the art of the multilevel inverters with reduced count components. Electronics 2020, 9, 1924. [Google Scholar] [CrossRef]
- Aganah, K.A.; Luciano, C.; Ndoye, M.; Murphy, G. New switched-dual-source multilevel inverter for symmetrical and asymmetrical operation. Energies 2018, 11, 984. [Google Scholar] [CrossRef]
- Choudhury, S.; Bajaj, M.; Dash, T.; Kamel, S.; Jurado, F. Multilevel inverter: A survey on classical and advanced topologies, control schemes, applications to power system and future prospects. Energies 2021, 14, 5773. [Google Scholar] [CrossRef]
- Li, G.; Wang, L.; Li, F. Single-Phase Voltage Source Multi-Level Inverter Hysteresis SVPWM Reconfigurable Fault-Tolerant Control Method. Energies 2022, 15, 2557. [Google Scholar] [CrossRef]
- Rafiq, M.A.; Ulasyar, A.; Uddin, W.; Zad, H.S.; Khattak, A.; Zeb, K. Design and Control of a Quasi-Z Source Multilevel Inverter Using a New Reaching Law-Based Sliding Mode Control. Energies 2022, 15, 8002. [Google Scholar] [CrossRef]
- Rawa, M.; Siddique, M.D.; Mekhilef, S.; Mohamed Shah, N.; Bassi, H.; Seyedmahmoudian, M.; Horan, B.; Stojcevski, A. Design and implementation of a hybrid single T-type double H-bridge multilevel inverter (STDH-MLI) topology. Energies 2019, 12, 1810. [Google Scholar] [CrossRef]
- Shayeghi, H.; Seifi, A.; Hosseinpour, M.; Bizon, N. Developing a Generalized Multi-Level Inverter with Reduced Number of Power Electronics Components. Sustainability 2022, 14, 5545. [Google Scholar] [CrossRef]
- Li, H.; Liu, Y.; Yang, J. A novel FCS-MPC method of multi-level APF is proposed to improve the power quality in renewable energy generation connected to the grid. Sustainability 2021, 13, 4094. [Google Scholar] [CrossRef]
- Chakravarthi, B.C.V.; Siva Krishna Rao, G. Optimal Real Power Penetration to Solar PV-Fed Double Boost Integrated Multilevel Converter with Improved Power Quality. J. Circuits Syst. Comput. 2020, 29, 2050256. [Google Scholar] [CrossRef]
- Jahan, S.; Biswas, S.P.; Hosain, M.K.; Islam, M.R.; Haq, S.; Kouzani, A.Z.; Mahmud, M.P. An advanced control technique for power quality improvement of grid-tied multilevel inverter. Sustainability 2021, 13, 505. [Google Scholar] [CrossRef]
- Mukundan, N.; Vineeth, K.; Kumar, S.S.; Jayaprakash, P. Improved H-bridge multilevel inverter for grid integration of photovoltaic power conversion system with power quality enhancement. In Proceedings of the 2020 IEEE International Conference on Power Electronics, Smart Grid and Renewable Energy (PESGRE2020), Cochin, India, 2–4 January 2020; pp. 1–6. [Google Scholar]
- Lova Lakshmi, T.; Gopichand Naik, M.; Rajendra Prasad, S. TLBO algorithm for multi-level inverter-based multi-terminal HVDC system in grid-tied photovoltaic power plant. J. Inst. Eng. Ser. B 2020, 101, 435–442. [Google Scholar] [CrossRef]
- Roslan, M.; Al-Shetwi, A.Q.; Hannan, M.; Ker, P.; Zuhdi, A. Particle swarm optimization algorithm-based PI inverter controller for a grid-connected PV system. PLoS ONE 2020, 15, e0243581. [Google Scholar] [CrossRef] [PubMed]































{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| State | Sa1 | Sa2 | Sb1 | Sb2 | Sc1 | Sc2 | AS1 | Charging | |
|---|---|---|---|---|---|---|---|---|---|
| C1 | C2 | ||||||||
| S1 | 1 | 0 | 0 | 1 | 0 | 1 | 0 | NE | NE |
| S2 | 1 | 0 | 0 | 1 | 0 | 0 | 1 | NE | C |
| S3 | 1 | 0 | 1 | 0 | 0 | 1 | 0 | DC | DC |
| S4 | 1 | 0 | 0 | 0 | 1 | 0 | 0 | C | C |
| S5 | 1 | 0 | 1 | 0 | 0 | 0 | 1 | DC | NE |
| S6 | 1 | 0 | 1 | 0 | 1 | 0 | 0 | NE | NE |
| S7 | 0 | 1 | 0 | 1 | 0 | 1 | 0 | NE | NE |
| S8 | 0 | 1 | 0 | 1 | 0 | 0 | 1 | NE | DC |
| S9 | 0 | 1 | 0 | 1 | 1 | 0 | 0 | DC | DC |
| S10 | 0 | 1 | 1 | 0 | 0 | 1 | 0 | C | C |
| S11 | 0 | 1 | 1 | 0 | 0 | 0 | 1 | C | NE |
| S12 | 0 | 1 | 1 | 0 | 1 | 0 | 0 | NE | NE |
| Methods | Tracking Speed | Complexity | Tracking Efficiency | Reliability | MPP Oscillations | Tracking Accuracy |
|---|---|---|---|---|---|---|
| P&O | Slow | Less | Less | Low | High | Medium |
| FLC | Moderate | Less | Medium | Moderate | Medium | Medium |
| ACO-FLC | Moderate | Moderate | Medium | Low | Moderate | Medium |
| Fuzzy PSO | Moderate | Moderate | Medium | High | High | Medium |
| GWO-FLC | Fast | Less | High | High | Less | High |
| Proposed | Fast | Very Less | Very High | Very High | Very Less | Very High |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Sekar, R.M.; Murugesan, S.; Devadasu, G.; Salkuti, S.R. A Coyote Optimization-Based Residual Attention Echo State Reactive Controller for Improving Power Quality in Grid-PV Systems. Machines 2023, 11, 384. https://doi.org/10.3390/machines11030384
Sekar RM, Murugesan S, Devadasu G, Salkuti SR. A Coyote Optimization-Based Residual Attention Echo State Reactive Controller for Improving Power Quality in Grid-PV Systems. Machines. 2023; 11(3):384. https://doi.org/10.3390/machines11030384
Chicago/Turabian StyleSekar, Rathinam Marimuthu, Sankar Murugesan, Ghanta Devadasu, and Surender Reddy Salkuti. 2023. "A Coyote Optimization-Based Residual Attention Echo State Reactive Controller for Improving Power Quality in Grid-PV Systems" Machines 11, no. 3: 384. https://doi.org/10.3390/machines11030384
APA StyleSekar, R. M., Murugesan, S., Devadasu, G., & Salkuti, S. R. (2023). A Coyote Optimization-Based Residual Attention Echo State Reactive Controller for Improving Power Quality in Grid-PV Systems. Machines, 11(3), 384. https://doi.org/10.3390/machines11030384