
Design and Experimental Validation of a Rapidly Deployable Folding Floating Bridge Based on Rigid-Flexible Combination

Abstract
1. Introduction
- We have designed a rigid-flexible combination folding structure, which ingeniously combines the advantages of the two materials, greatly improving the load capacity and trafficability compared with the current rigid-flexible composite floating bridge;
- We have improved the design of the flexible connector, allowing for pre-connection and folding. This approach enables storage and transportation space savings and rapid erection;
- We have adopted a reliable and stable structural design, which can be used in various scenarios (e.g., military shoal landing, emergency rescue, and disaster relief);
- We have conducted a series of calculations and analyses to evaluate the safety and reliability of the floating bridge (e.g., buoyancy calculation, strength check of the connections, and bearing capacity calculation). Additionally, we have used AQWA software to calculate and verify the anchoring scheme of the floating bridge and its motion response under wave loads. Finally, we used a physical model to conduct a ballast test to confirm the feasibility of the inflatable capsule as the primary bearing structure of the floating bridge.
2. The Structural Design
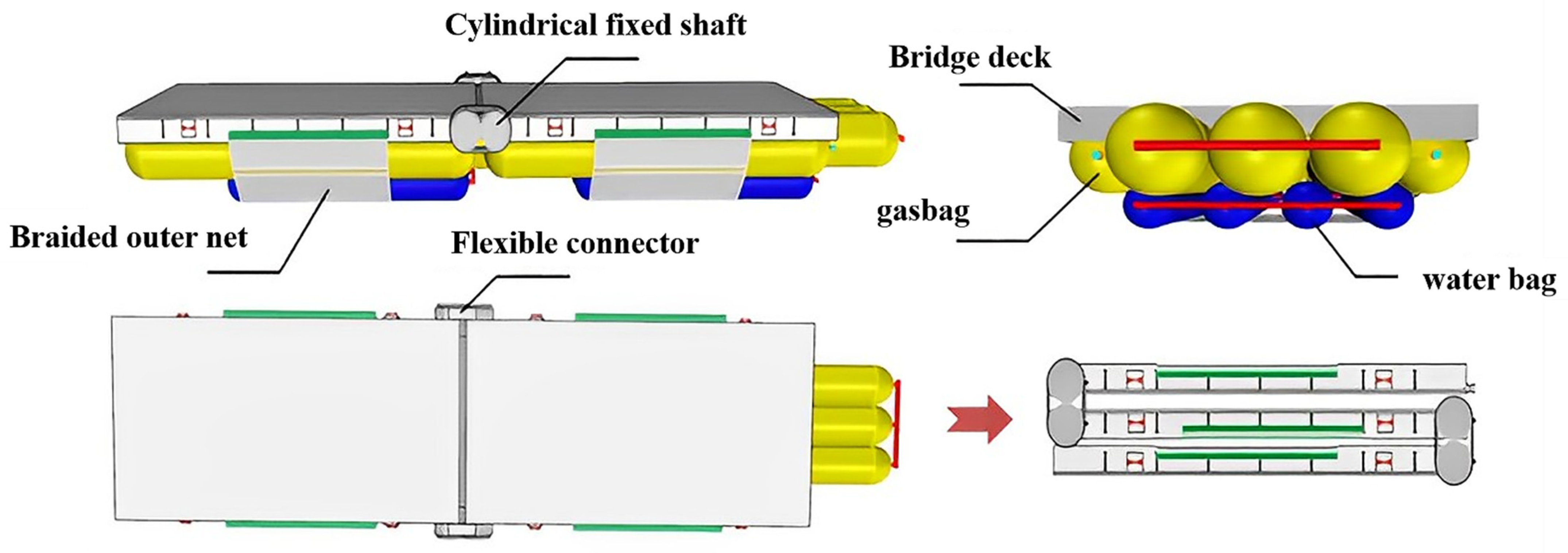
2.1. The Overall Structural Design of the Rigid-Flexible Folding Floating Bridge
2.2. Structure Design of Airbag and Water Bag
2.3. Structural Design of the Connection
2.4. Bridge Deck Design
2.5. Implementation Plan
3. Ballast Numerical Calculation
3.1. Floating Calculation
3.2. Strength Check of the Floating Bridge Connection
3.2.1. Establishment of the Abstract Model
3.2.2. Determination of Stiffness Coefficient k and Distributed Load q of Elastic Foundation
3.2.3. Deflection at Point B
3.2.4. Internal Force Model of the Connecting Ring
3.3. Formatting of Mathematical Components
3.3.1. Establishment of a Simplified Model
3.3.2. Calculation of Pontoon Parameters
- When x approaches infinity, the displacement and bending moment of the beam are zero. The bending moment equation of the beam is:
- At x = 0, due to the left-right symmetry, θ = 0, Q = P/2. The rotation equation of the beam is:
4. Simulation Analysis of Motion Response and Mooring
Motion Response and Mooring Check
5. Experiments
5.1. Experiment 1: Bearing Reliability Test of the Floating Bridge
5.2. Experiment 2: Relationship between Lateral Eccentric Load and Transverse Inclination of Pontoon
6. Discussion and Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Appendix A
Appendix A.1. The Detailed Calculation Process of Pontoon Parameters Is as Follows
Appendix A.2. Specific Experimental Verification Process
Appendix A.2.1. Experiment 1 Implementation Plan
- Confirm that the weather is good and that the wind will not affect the test.
- Determine the maximum load allowed by the deflection of the floating bridge.
- Observe the pontoon for damage. If damage is present, replace the affected airbag immediately.
- Ensure that all instruments are functioning correctly.
- Connect the air pump and inflate the airbag until the air pressure reaches the specified value. Disconnect the air pump interface, lift the pontoon with four people, and slowly put it into the water (near the edge of the pool).
- Model water injection: Connect the pontoon water inlet to the water pump, put the water pump into the water, connect the power supply, and inject water until the corresponding pressure value is reached. Then disconnect the water pump interface.
- Record the no-load draft reading. After the model is stable, record the draft depth d of the floating bridge when it is empty with the bottom water bag.
- Conduct the ballast test: Perform the ballast test at 2 calibration scales on the pontoon deck, place 50 kg weights, and read the readings of the three calibration scales on the pontoon after the pontoon is stable. Then increase the ballast weight with a gradient of 50 kg until the ballast reaches 400 kg and record the corresponding scale readings.
- Data summary: Fit a curve of the relationship between the ballast and draft of the floating bridge with the bottom water pocket based on the different draft values obtained under different ballast conditions.
Appendix A.2.2. Experiment 2 Implementation Plan
- Airbag Inflation: Connect the air pump and inflate the airbag until the air pressure reaches the specified value, then disconnect the air pump interface.
- Water Injection: Connect the water pump to fill the pontoon water bag.
- Record the No-load Draft Reading: After the model stabilizes, read the draft of the floating bridge when it is not loaded.
- Carry out the Ballast Test: Place a 50 kg weight at the pontoon position and conduct a partial load test. After the pontoon stabilizes, read the scale reading in the middle of the pontoon. Then increase the ballast weight with a gradient of 50 kg until the ballast reaches 400 kg and record the corresponding scale readings.
Appendix A.3. The Source of Formula (7) and the Description of This Formula Variables
References
- Lwin, M. Floating bridges. In Bridge Engineering Handbook; CRC Press: Boca Raton, FL, USA, 2019; pp. 2201–2221. [Google Scholar]
- Zhou, J.; Liang, H. An intelligent floating bridge system with strong maneuverability on the sea. In Proceedings of the 2022 IEEE Asia-Pacific Conference on Image Processing, Electronics and Computers (IPEC), Dalian, China, 14–16 April 2022. [Google Scholar]
- Lee, D.; Kim, Y. Control system for installation and position keeping of interconnected flexible floating bridge. Meas. Control 2020, 53, 2092–2100. [Google Scholar] [CrossRef]
- Liu, Y.; Ye, H.; Geng, B.; Zhou, J.; Li, Y. FE analyses and structural optimization on refitted floating container. J. Phys. Conf. Ser. 2019, 1303, 012039. [Google Scholar] [CrossRef]
- Minoretti, A.; Xiang, X.; Johansen, I.; Eidem, M. The future of the tunnel crossing: The submerged floating tube bridge. Struct. Eng. Int. 2020, 30, 493–497. [Google Scholar] [CrossRef]
- Moan, T.; Eidem, M. Floating bridges and submerged tunnels in Norway—The history and future outlook. In WCFS2019: Proceedings of the World Conference on Floating Solutions, Singapore, 22–23 April 2019; Springer: Singapore, 2019. [Google Scholar]
- Silva, A.L.L.; Correia, J.A.; Xin, H.; Lesiuk, G.; De Jesus, A.M.; Fernandes, A.A.; Berto, F. Fatigue strength assessment of riveted details in railway metallic bridges. Eng. Fail. Anal. 2021, 121, 105120. [Google Scholar] [CrossRef]
- Montenegro, P.A.; Castro, J.M.; Calcada, R.; Soares, J.M.; Coelho, H.; Pacheco, P. Probabilistic numerical evaluation of dynamic load allowance factors in steel modular bridges using a vehicle-bridge interaction model. Eng. Struct. 2021, 226, 111316. [Google Scholar] [CrossRef]
- Chen, Z.Q.; Zheng, S.X.; Ding, Z.H.; Zhang, J.; Tai, Y.J. Seismic reliability evaluation of bridges under spatially varying ground motions using a four-parameter distribution. Eng. Struct. 2021, 247, 113157. [Google Scholar] [CrossRef]
- Somala, S.; Karthik, K.; Mangalathu, S. Diaphragm abutment Californian bridges subjected to UCERF2 rupture scenarios: Complete damage state evolution with improvements to seismic codes. Soil Dyn. Earthq. Eng. 2022, 155, 107204. [Google Scholar] [CrossRef]
- Fenerci, A.; Kvåle, K.A.; Xiang, X.; Øiseth, O. Hydrodynamic interaction of floating bridge pontoons and its effect on the bridge dynamic responses. Mar. Struct. 2022, 83, 103174. [Google Scholar] [CrossRef]
- Thomas, J.; Van, A. An exact solution for inflated orthotropic membrane tubes. Thin Wall Struct. 2013, 67, 116–120. [Google Scholar] [CrossRef]
- Cheng, Z.; Gao, Z.; Moan, T. Extreme responses and associated uncertainties for a long end-anchored floating bridge. Eng. Struct. 2020, 219, 110858. [Google Scholar] [CrossRef]
- Thomas, J.; Jiang, Z.; Wielgosz, C. Continuous and finite element methods for the vibrations of inflatable beams. Int. J. Steel Struct. 2006, 21, 197–222. [Google Scholar] [CrossRef]
- Viuff, T.; Leira, B.; Xiang, X.; Øiseth, O. Effects of wave directionality on extreme response for a long end-anchored floating bridge. Appl. Ocean Res. 2019, 90, 101843. [Google Scholar] [CrossRef]
- Xu, Y.; Øiseth, O.; Moan, T.; Naess, A. Prediction of long-term extreme load effects due to wave and wind actions for cable-supported bridges with floating pylons. Eng. Struct. 2018, 172, 321–333. [Google Scholar] [CrossRef]
- Skorpa, L. Developing new methods to cross wide and deep Norwegian fjords. Procedia Eng. 2010, 4, 81–89. [Google Scholar] [CrossRef]
- Xu, Y.; Øiseth, O.; Moan, T. Time domain simulations of wind- and wave-induced load effects on a three-span suspension bridge with two floating pylons. Mar. Struct. 2018, 58, 434–452. [Google Scholar] [CrossRef]
- Cheng, Z.; Svangstu, E.; Moan, T.; Gao, Z. Long-term joint distribution of environmental conditions in a Norwegian fjord for design of floating bridges. Ocean Eng. 2019, 191, 106472. [Google Scholar] [CrossRef]
- Martins, A.; Simões, L.; Negrão, J. Optimization of extradosed concrete bridges subjected to seismic action. Comput. Struct. 2021, 245, 106460. [Google Scholar] [CrossRef]
- Salman, N.; Issa, M. Calibration and parametric investigation of integral abutment bridges. Eng. Struct. 2021, 227, 111381. [Google Scholar] [CrossRef]
- Broch, E. Planning and utilisation of rock caverns and tunnels in Norway. Tunn. Undergr. Space Technol. 2016, 55, 329–338. [Google Scholar] [CrossRef]
- Wang, H.; Jin, X. Dynamic analysis of maritime gasbag-type floating bridge subjected to moving loads. Int. J. Nav. Arch. Ocean Eng. 2016, 8, 137–152. [Google Scholar] [CrossRef]
- Seo, J.; Kidd, B. Parametric study of deteriorating precast concrete double-tee girder bridges using computational models. Eng. Struct. 2021, 230, 111714. [Google Scholar] [CrossRef]
- Zhu, D.; Yuan, P.; Dong, Y. Probabilistic performance of coastal bridges under hurricane waves using experimental and 3D numerical investigations. Eng. Struct. 2021, 242, 112493. [Google Scholar] [CrossRef]
- Farvizi, F.; Melville, B.W.; Shamseldin, A.Y.; Shafiei, S.; Hendi, E. Experimental investigation of tsunami bore-induced forces and pressures on skewed box section bridges. Ocean Eng. 2021, 224, 108730. [Google Scholar] [CrossRef]
- Van, A.; Wielgosz, C. Finite element formulation for inflatable beams. Thin Wall Struct. 2007, 45, 221–236. [Google Scholar] [CrossRef]
- Viuff, T.; Xiang, X.; Leira, B.; Øiseth, O. Software-to-software comparison of end-anchored floating bridge global analysis. J. Bridge Eng. 2020, 25, 04020022. [Google Scholar] [CrossRef]
- Bertolesi Elisa Buitrago, M.; Adam, J.; Calderon, P.A. Fatigue assessment of steel riveted railway bridges: Full-scale tests and analytical approach. J. Constr. Steel Res. 2021, 182, 106664. [Google Scholar] [CrossRef]
- Rajeeth, T.; Ravi, G. Fatigue reliability evaluation of aged railway steel bridges based on probabilistic fracture mechanics. Trans. Tianjin Univ. 2022, 7, 593–599. [Google Scholar] [CrossRef]
- Xu, Z.; Melville, B.; Nandasena, N.A.K.; Whittaker, C.; Shamseldin, A.; Farvizi, F. Tsunami loads on slab bridges. Coast. Eng. 2021, 165, 103853. [Google Scholar] [CrossRef]
- Razzaq, M.; Sennah, K.; Ghrib, F. Live load distribution factors for simply-supported composite steel I-girder bridges. J. Constr. Steel Res. 2021, 181, 106612. [Google Scholar] [CrossRef]
- Qu, K.; Sun, W.Y.; Kraatz, S.; Deng, B.; Jiang, C.B. Effects of floating breakwater on hydrodynamic load of low-lying bridge deck under impact of cnoidal wave. Ocean Eng. 2020, 203, 107217. [Google Scholar] [CrossRef]
- He, Y.; Ji, W.; Ying, J.; Han, B. Hydrodynamic performance of a continuous floating bridge with heave plates. Appl. Ocean Res. 2021, 108, 102442. [Google Scholar] [CrossRef]
- Hou, W.; Zheng, Y.; Guo, W.; Pengcheng, G. Piezoelectric vibration energy harvesting for rail transit bridge with steel-spring floating slab track system. J. Clean. Prod. 2020, 291, 125283. [Google Scholar] [CrossRef]
- Viuff, T.; Xiang, X.; Øiseth, O.; Leira, B.J. Model uncertainty assessment for wave- and current-induced global response of a curved floating floating bridge. Appl. Ocean Res. 2020, 105, 102368. [Google Scholar] [CrossRef]
- Jun, Z.; Wei, L. Dynamic model of a hinged-girder floating bridge subjected by moving loads. Appl. Ocean Res. 2021, 114, 102804. [Google Scholar] [CrossRef]
- Manisha; Kaligatla, R.; Sahoo, T. Effect of bottom undulation for mitigating wave-induced forces on a floating bridge. Wave Motion 2019, 89, 166–184. [Google Scholar] [CrossRef]
- Kar, P.; Sahoo, T.; Meylan, M. Bragg scattering of long waves by an array of floating flexible plates in the presence of multiple submerged trenches. Phys. Fluids 2020, 32, 096603. [Google Scholar] [CrossRef]
- Vernon, A. Squire. Ocean wave interactions with sea ice: A reappraisal. Annu. Rev. Fluid Mech. 2020, 5, 37–60. [Google Scholar]
- Fu, S.; Cui, W.; Chen, X.; Cong, W. Hydroelastic analysis of a nonlinearly connected floating bridge subjected to moving loads. Mar. Struct. 2005, 18, 85–107. [Google Scholar]
- Dai, J.; Leira, B.; Moan, T.; Kvittem, M.I. Inhomogeneous wave load effects on a long, straight and side-anchored floating floating bridge. Mar. Struct. 2020, 72, 102763. [Google Scholar] [CrossRef]
- Cheng, Z.; Gao, Z.; Moan, T. Wave load effect analysis of a floating bridge in a fjord considering inhomogeneous wave conditions. Eng. Struct. 2018, 163, 197–214. [Google Scholar] [CrossRef]
- Gutiérrez-Romero, J.E.; García-Espinosa, J.; Serván-Camas, B.; Zamora-Parra, B. Non-linear dynamic analysis of the response of moored floating structures. Mar. Struct. 2016, 49, 116–137. [Google Scholar] [CrossRef]




















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Size |
|---|---|
| Total weight | 33–36 t |
| Length (gun forward) | 9.2 m |
| Body length | 7.5 m |
| Width | 2.5 m |
| Height | 2.5 m |
| Parameter | Size |
|---|---|
| Pontoon unit size (mm) | 10,000 × 5000 × 1334 |
| Airbag size (mm) | 10,000 m long, 1000 m in diameter |
| Water sac size (mm) | 6500 m long, 500 m in diameter |
| Bridge deck size (mm) | 10,000 × 5000 × 25 |
| Number of airbags | 5 |
| Number of water sacs | 4 |
| The dead weight of pontoon (t) | 1 |
| The load capacity of pontoon (t) | 40 |
| Parameter | Size |
|---|---|
| Airbag material | Laminated composite |
| Airbag thickness (mm) | 3.5 |
| The internal pressure of the airbag (MPa) | 0.313 |
| The load capacity of pontoon (t) | 40 |
| Floating bridge erection time (min) | 20 |
| Floating bridge roll-up time (min) | 30 |
| Position | Deadweight (kg) | Midpoint Scale (cm) | Left Calibration Scale (cm) | Right End Scale (cm) | The Average Value of the Left and Right Scale (cm) |
|---|---|---|---|---|---|
| Dead load position | 0 | 0.0 | 0.0 | 0.0 | 0 |
| 50 | 2.0 | 0.5 | 0.5 | 0.5 | |
| 100 | 3.5 | 0.8 | 1.0 | 0.9 | |
| 150 | 5.0 | 1.0 | 1.2 | 1.1 | |
| Pontoon midpoint | 200 | 6.7 | 1.0 | 1.2 | 1.1 |
| 250 | 8.0 | 1.3 | 1.5 | 1.4 | |
| 300 | 10.0 | 1.8 | 1.5 | 1.65 | |
| 350 | 10.9 | 1.8 | 1.5 | 1.65 | |
| 400 | 12.4 | 1.8 | 1.5 | 1.65 | |
| The left end of the pontoon | 400 | 3.8 | 1.7 | −5.0 | −1.65 |
| nothing | Unload | 1.0 | 3.0 | −3.0 | 0 |
| Position | Deadweight (kg) | Inside Waterline Scale (cm) | Outside Waterline Scale (cm) |
|---|---|---|---|
| The pontoon midpoint trolley is close to the shoreside | 0 | 1.0 | 17.5 |
| 200 | 13.5 | 15.0 | |
| 250 | 16.0 | 15.5 | |
| 300 | 20.0 | 14.2 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, C.; Hu, H.; Gan, J. Design and Experimental Validation of a Rapidly Deployable Folding Floating Bridge Based on Rigid-Flexible Combination. Machines 2023, 11, 415. https://doi.org/10.3390/machines11040415
Wang C, Hu H, Gan J. Design and Experimental Validation of a Rapidly Deployable Folding Floating Bridge Based on Rigid-Flexible Combination. Machines. 2023; 11(4):415. https://doi.org/10.3390/machines11040415
Chicago/Turabian StyleWang, Chenxin, Haiyue Hu, and Jin Gan. 2023. "Design and Experimental Validation of a Rapidly Deployable Folding Floating Bridge Based on Rigid-Flexible Combination" Machines 11, no. 4: 415. https://doi.org/10.3390/machines11040415
APA StyleWang, C., Hu, H., & Gan, J. (2023). Design and Experimental Validation of a Rapidly Deployable Folding Floating Bridge Based on Rigid-Flexible Combination. Machines, 11(4), 415. https://doi.org/10.3390/machines11040415