
A Human Error Analysis in Human–Robot Interaction Contexts: Evidence from an Empirical Study
 , , ,
, , ,  , and
, and
Abstract
:1. Introduction
2. Literature Review
3. Materials and Methods
3.1. Task and Virtual Environment
3.2. Participants
3.3. Procedure and Experimental Design
3.4. Error Assessment and Data Collection
- Low-severity errors: Errors considered in this category cause a small increase in the lead times of the entire task, but do not cause any problem to the final quality of the product.
- Medium-severity errors: Errors considered in this category cause a medium increase in the lead times of the entire task with very limited consequences on the quality of the final product.
- High-severity errors: Errors considered in this category cause an increase in the lead times of the entire task as well as quality damage that compromise the final quality of the products. Products subject to this type of error should be reworked to make their quality conform to the quality standards.
3.5. Statistical Analysis
4. Results and Discussion
4.1. Descriptive Statistics
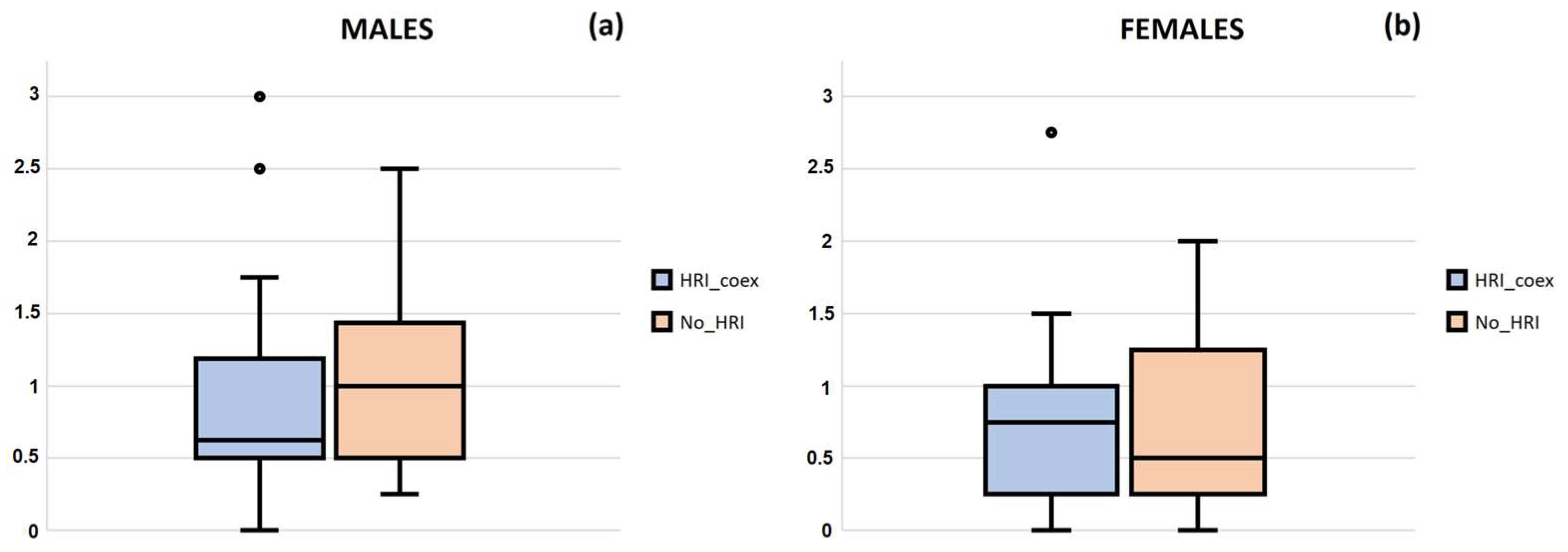
4.2. Statistical Results
- H0: the median of HRI_coex is equal to the median of No_HRI;
- H1: the median of HRI_coex is not equal to the median of No_HRI.
4.3. Discussion
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Appendix A

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Type of Error | Error Code | Severity Level |
|---|---|---|
| No errors committed during the task | E0 | - |
| Error in the removal of panel’s pop rivets | E1 | Low |
| Error in the positioning of the tool for pop rivets’ removal after usage | E2 | Medium |
| Error in the removal of a panel’s stringer | E3 | Low |
| Error in the positioning of the panel’s stringer on the work table | E4 | Low |
| Error in the operation of deburring | E5 | High |
| Error in the positioning of the deburring tool after usage | E6 | Medium |
| Error in positioning the sealant application tool after usage | E7 | Low |
| Error in releasing the stringer during the transportation to the panel | E8 | Medium |
| Error in positioning the stringer on the panel | E9 | Medium |
| Error during the grasp of elements supporting the stringer | E10 | Low |
| Error in positioning the elements supporting the stringer | E11 | Low |
References
- Devol, G. Mechanical Arm. U.S. Patent 2,988,237, 16 June 1961. Available online: https://patents.google.com/patent/US2988237A/en (accessed on 6 June 2023).
- Humlum, A. Robot Adoption and Labor Market Dynamics; Rockwool Foundation Research Unit: Berlin, Germany, 2022. [Google Scholar]
- Bartneck, C.; Belpaeme, T.; Eyssel, F.; Kanda, T.; Keijsers, M.; Šabanović, S. Human-Robot Interaction: An Introduction; Cambridge University Press: Cambridge, UK, 2020. [Google Scholar]
- Salem, M.; Dautenhahn, K. Evaluating trust and safety in HRI: Practical issues and ethical challenges. In Emerging Policy and Ethics of Human-Robot Interaction; University of Hertfordshire: London, UK, 2015. [Google Scholar]
- De Santis, A.; Siciliano, B.; De Luca, A.; Bicchi, A. An atlas of physical human–robot interaction. Mech. Mach. Theory 2008, 43, 253–270. [Google Scholar] [CrossRef] [Green Version]
- Zacharaki, A.; Kostavelis, I.; Gasteratos, A.; Dokas, I. Safety bounds in human robot interaction: A survey. Saf. Sci. 2020, 127, 104667. [Google Scholar] [CrossRef]
- Sharkawy, A.N.; Koustoumpardis, P.N. Human–robot interaction: A review and analysis on variable admittance control, safety, and perspectives. Machines 2022, 10, 591. [Google Scholar] [CrossRef]
- Caterino, M.; Chiacchio, P.; Cristalli, C.; Fera, M.; Lettera, G.; Natale, C.; Nisi, M. Robotized assembly and inspection of composite fuselage panels: The LABOR project approach. In IOP Conference Series: Materials Science and Engineering; IOP Publishing: Bristol, UK, 2021; Volume 1024, p. 012019. [Google Scholar]
- ISO/TS 15066; Robots and Robotic Devices: Collaborative Robots. International Organization for Standardization: Geneva, Switzerland, 2016.
- Lee, J.D.; See, K.A. Trust in automation: Designing for appropriate reliance. Hum. Factors 2004, 46, 50–80. [Google Scholar] [CrossRef] [Green Version]
- Rossi, A.; Dautenhahn, K.; Koay, K.L.; Walters, M.L. How the timing and magnitude of robot errors influence peoples’ trust of robots in an emergency scenario. In Proceedings of the Social Robotics: 9th International Conference, ICSR 2017, Tsukuba, Japan, 22–24 November 2017; pp. 42–52. [Google Scholar]
- Rossi, A.; Dautenhahn, K.; Koay, K.L.; Walters, M.L.; Holthaus, P. Evaluating people’s perceptions of trust in a robot in a repeated interactions study. In Proceedings of the Social Robotics: 12th International Conference, ICSR 2020, Golden, CO, USA, 14–18 November 2020; pp. 453–465. [Google Scholar]
- Charalambous, G.; Fletcher, S.; Webb, P. The development of a scale to evaluate trust in industrial human-robot collaboration. Int. J. Soc. Robot. 2016, 8, 193–209. [Google Scholar] [CrossRef]
- Koppenborg, M.; Nickel, P.; Naber, B.; Lungfiel, A.; Huelke, M. Effects of movement speed and predictability in human–robot collaboration. Hum. Factors Ergon. Manuf. Serv. Ind. 2017, 27, 197–209. [Google Scholar] [CrossRef]
- Kadir, B.A.; Brober, O. Human-centered Design of Work Systems in the Transition to Industry 4.0. Appl. Ergon. 2021, 92, 103334. [Google Scholar] [CrossRef]
- Caterino, M.; Rinaldi, M.; Fera, M. Digital ergonomics: An evaluation framework for the ergonomic risk assessment of heterogeneous workers. Int. J. Comput. Integr. Manuf. 2022, 1–21. [Google Scholar] [CrossRef]
- Cárdenas-Robledo, L.A.; Hernández-Uribe, Ó.; Reta, C.; Cantoral-Ceballos, J.A. Extended reality applications in industry 4.0.-A systematic literature review. Telemat. Inform. 2022, 73, 101863. [Google Scholar] [CrossRef]
- Or, C.K.; Duffy, V.G.; Cheung, C.C. Perception of safe robot idle time in virtual reality and real industrial environments. Int. J. Ind. Ergon. 2009, 39, 807–812. [Google Scholar] [CrossRef]
- Ottogalli, K.; Rosquete, D.; Rojo, J.; Amundarain, A.; María Rodríguez, J.; Borro, D. Virtual reality simulation of human-robot coexistence for an aircraft final assembly line: Process evaluation and ergonomics assessment. Int. J. Comput. Integr. Manuf. 2021, 34, 975–995. [Google Scholar] [CrossRef]
- Zio, E. Reliability engineering: Old problems and new challenges. Reliab. Eng. Syst. Saf. 2009, 94, 125–141. [Google Scholar] [CrossRef] [Green Version]
- Swain, A.D.; Guttmann, H.E. Handbook of Human-Reliability Analysis with Emphasis on Nuclear Power Plant Applications; Final report (No. NUREG/CR-1278; SAND-80-0200); Sandia National Labs: Albuquerque, NM, USA, 1983.
- Di Pasquale, V.; Miranda, S.; Iannone, R.; Riemma, S. A simulator for human error probability analysis (SHERPA). Reliab. Eng. Syst. Saf. 2015, 139, 17–32. [Google Scholar] [CrossRef]
- Hou, L.X.; Liu, R.; Liu, H.C.; Jiang, S. Two decades on human reliability analysis: A bibliometric analysis and literature review. Ann. Nucl. Energy 2021, 151, 107969. [Google Scholar] [CrossRef]
- Kern, C.; Refflinghaus, R. Cross-disciplinary method for predicting and reducing human error probabilities in manual assembly operations. Total Qual. Manag. Bus. Excell. 2013, 24, 847–858. [Google Scholar] [CrossRef]
- Kern, C.; Refflinghaus, R. Assembly-specific database for predicting human reliability in assembly operations. Total Qual. Manag. Bus. Excell. 2015, 26, 1056–1070. [Google Scholar] [CrossRef]
- Caputo, A.C.; Pelagagge, P.M.; Salini, P. Modelling human errors and quality issues in kitting processes for assembly lines feeding. Comput. Ind. Eng. 2017, 111, 492–506. [Google Scholar] [CrossRef]
- Di Pasquale, V.; Miranda, S.; Iannone, R.; Riemma, S. An HRA-based simulation model for the optimization of the rest breaks configurations in human-intensive working activities. IFAC-PapersOnLine 2015, 48, 332–337. [Google Scholar] [CrossRef]
- Torres, Y.; Nadeau, S.; Landau, K. Classification and quantification of human error in manufacturing: A case study in complex manual assembly. Appl. Sci. 2021, 11, 749. [Google Scholar] [CrossRef]
- Wang, Y.B.; Zhang, T.; Xue, Q. The design and realization of HRA service system for the engine assembly. In Applied Mechanics and Materials; Trans Tech Publications Ltd.: Wollerau, Switzerland, 2014; Volume 635, pp. 1900–1905. [Google Scholar]
- Pan, X.; Lin, Y.; He, C. A review of cognitive models in human reliability analysis. Qual. Reliab. Eng. Int. 2017, 33, 1299–1316. [Google Scholar] [CrossRef]
- Mosleh, A.; Chang, Y.H. Model-based human reliability analysis: Prospects and requirements. Reliab. Eng. Syst. Saf. 2004, 83, 241–253. [Google Scholar] [CrossRef]
- Sauppé, A.; Mutlu, B. The social impact of a robot co-worker in industrial settings. In Proceedings of the 33rd Annual ACM Conference on Human Factors in Computing Systems, Seoul, Republic of Korea, 18–23 April 2015; pp. 3613–3622. [Google Scholar]
- Laudante, E.; Greco, A.; Caterino, M.; Fera, M. Human–robot interaction for improving fuselage assembly tasks: A case study. Appl. Sci. 2020, 10, 5757. [Google Scholar] [CrossRef]
- Lu, L.; Xie, Z.; Wang, H.; Li, L.; Xu, X. Mental stress and safety awareness during human-robot collaboration-Review. Appl. Ergon. 2022, 105, 103832. [Google Scholar] [CrossRef] [PubMed]
- Stanton, N.A.; Chambers, P.R.; Piggott, J. Situational awareness and safety. Saf. Sci. 2001, 39, 189–204. [Google Scholar] [CrossRef] [Green Version]
- Gasparetto, A.; Zanotto, V. A technique for time-jerk optimal planning of robot trajectories. Robot. Comput-Integr. Manuf. 2008, 24, 415–426. [Google Scholar] [CrossRef]
- Di Pasquale, V.; De Simone, V.; Giubileo, V.; Miranda, S. A taxonomy of factors influencing worker’s performance in human–robot collaboration. IET Collab. Intell. Manuf. 2023, 5, e12069. [Google Scholar] [CrossRef]
- Alves, C.; Cardoso, A.; Colim, A.; Bicho, E.; Braga, A.C.; Cunha, J.; Faria, C.; Rocha, L.A. Human–robot interaction in industrial settings: Perception of multiple participants at a crossroad intersection scenario with different courtesy cues. Robotics 2022, 11, 59. [Google Scholar] [CrossRef]
- Bethel, C.L.; Salomon, K.; Murphy, R.R.; Burke, J.L. Survey of psychophysiology measurements applied to human-robot interaction. In Proceedings of the RO-MAN 2007-The 16th IEEE International Symposium on Robot and Human Interactive Communication, Jeju, Republic of Korea, 26–29 August 2007; pp. 732–737. [Google Scholar]
- Huber, M.; Rickert, M.; Knoll, A.; Brandt, T.; Glasauer, S. Human-robot interaction in handing-over tasks. In Proceedings of the RO-MAN 2008-The 17th IEEE International Symposium on Robot and Human Interactive Communication, Munich, Germany, 1–3 August 2008; pp. 107–112. [Google Scholar]
- Zhang, B.; Amirian, J.; Eberle, H.; Pettré, J.; Holloway, C.; Carlson, T. From HRI to CRI: Crowd Robot Interaction—Understanding the Effect of Robots on Crowd Motion: Empirical Study of Pedestrian Dynamics with a Wheelchair and a Pepper Robot. Int. J. Soc. Robot. 2021, 14, 631–643. [Google Scholar] [CrossRef]
- Chen, Z.; Jiang, C.; Guo, Y. Pedestrian-robot interaction experiments in an exit corridor. In Proceedings of the 2018 15th International Conference on Ubiquitous Robots (UR), Honolulu, HI, USA, 26–30 June 2018; pp. 29–34. [Google Scholar]
- Xie, Y.; Bodala, I.P.; Ong, D.C.; Hsu, D.; Soh, H. Robot capability and intention in trust-based decisions across tasks. In Proceedings of the 2019 14th ACM/IEEE International Conference on Human-Robot Interaction (HRI), Daegu, Republic of Korea, 11–14 March 2019; pp. 39–47. [Google Scholar]
- Vassallo, C.; Olivier, A.H.; Souères, P.; Crétual, A.; Stasse, O.; Pettré, J. How do walkers avoid a mobile robot crossing their way? Gait Posture 2017, 51, 97–103. [Google Scholar] [CrossRef] [Green Version]
- De Simone, V.; Di Pasquale, V.; Giubileo, V.; Miranda, S. Human-Robot Collaboration: An analysis of worker’s performance. Procedia Comput. Sci. 2022, 200, 1540–1549. [Google Scholar] [CrossRef]
- Hashemi-Petroodi, S.E.; Thevenin, S.; Kovalev, S.; Dolgui, A. Operations management issues in design and control of hybrid human-robot collaborative manufacturing systems: A survey. Annu. Rev. Control 2020, 49, 264–276. [Google Scholar] [CrossRef]
- Morioka, M.; Sakakibara, S. A new cell production assembly system with human–robot cooperation. CIRP Ann. 2010, 59, 9–12. [Google Scholar] [CrossRef]
- Weems, C.F.; Costa, N.M.; Watts, S.E.; Taylor, L.K.; Cannon, M.F. Cognitive errors, anxiety sensitivity, and anxiety control beliefs: Their unique and specific associations with childhood anxiety symptoms. Behav. Modif. 2007, 31, 174–201. [Google Scholar] [CrossRef] [PubMed]
- Barker, L.M.; Nussbaum, M.A. The effects of fatigue on performance in simulated nursing work. Ergonomics 2011, 54, 815–829. [Google Scholar] [CrossRef]
- Rahimi, M.; Karwowski, W. Human perception of robot safe speed and idle time. Behav. Inf. Technol. 1990, 9, 381–389. [Google Scholar] [CrossRef]
- Dehais, F.; Sisbot, E.A.; Alami, R.; Causse, M. Physiological and subjective evaluation of a human–robot object hand-over task. Appl. Ergon. 2011, 42, 785–791. [Google Scholar] [CrossRef] [Green Version]
- Taherdoost, H. What Is the Best Response Scale for Survey and Questionnaire Design; Review of Different Lengths of Rating Scale/Attitude Scale/Likert Scale. Int. J. Acad. Res. Manag. 2019, 8, 1–10. [Google Scholar]
- De Barros RS, M.; Hidalgo JI, G.; de Lima Cabral, D.R. Wilcoxon rank sum test drift detector. Neurocomputing 2018, 275, 1954–1963. [Google Scholar] [CrossRef]







| HRI_coex | No_HRI | |
|---|---|---|
| Number of male participants | 23 | 22 |
| Number of female participants | 16 | 17 |
| Mean age of participants (years) | 24.5 | 25.1 |
| Standard deviation of age (years) | 3.49 | 3.49 |
| HRI_coex | No_HRI | |
|---|---|---|
| First experiment | ||
| Number of operations without errors | 191 | 186 |
| Number of operations with low-severity errors | 19 | 28 |
| Number of operations with medium-severity errors | 19 | 19 |
| Number of operations with high-severity errors | 11 | 7 |
| Second experiment | ||
| Number of operations without errors | 201 | 211 |
| Number of operations with low-severity errors | 15 | 12 |
| Number of operations with medium-severity errors | 11 | 7 |
| Number of operations with high-severity errors | 13 | 10 |
| Third experiment | ||
| Number of operations without errors | 210 | 210 |
| Number of operations with low-severity errors | 17 | 13 |
| Number of operations with medium-severity errors | 5 | 8 |
| Number of operations with high-severity errors | 8 | 9 |
| Fourth experiment | ||
| Number of operations without errors | 217 | 219 |
| Number of operations with low-severity errors | 4 | 8 |
| Number of operations with medium-severity errors | 8 | 5 |
| Number of operations with high-severity errors | 11 | 8 |
| Wilcoxon Statistic | p-Value | α-Value | |
|---|---|---|---|
| Experiment 1 | 729.5 | 0.482 | 0.05 |
| Experiment 2 | 866.5 | 0.497 | 0.05 |
| Experiment 3 | 852 | 0.913 | 0.05 |
| Experiment 4 | 783 | 0.858 | 0.05 |
| Experiment_mean | 765.5 | 0.741 | 0.05 |
| MALES | FEMALES | ||||
|---|---|---|---|---|---|
| Wilcoxon Statistic | p-Value | Wilcoxon Statistic | p-Value | α-Value | |
| Experiment 1 | 198.5 | 0.309 | 162.5 | 0.947 | 0.05 |
| Experiment 2 | 247.0 | 0.871 | 194.5 | 0.236 | 0.05 |
| Experiment 3 | 238.5 | 0.980 | 140 | 0.482 | 0.05 |
| Experiment 4 | 196 | 0.261 | 181 | 0.433 | 0.05 |
| Experiment_mean | 198.5 | 0.327 | 173 | 0.688 | 0.05 |
| Wilcoxon Statistic | p-Value | α-Value | |
|---|---|---|---|
| HRI_coex | 1108.5 | 0.0016 | 0.05 |
| No_HRI | 1151.0 | 0.0003 | 0.05 |
| Questions |
|---|
| #1 Express the complexity level of the operation “pop rivets removal”. |
| #2 Express the complexity level of the operation “stringer removal”. |
| #3 Express the complexity level of the operation “deburring execution”. |
| #4 Express the complexity level of the operation “sealant application”. |
| #5 Express the complexity level of the operation “stringer positioning”. |
| #6 Express the complexity level of the operation “positioning the elements supporting the stringer”. |
| #7 Express how much you agree with the following sentence: “the presence of robot leads making a high number of errors”. |
| Question No. | Score Range | Results | |||
|---|---|---|---|---|---|
| Mean | Standard Deviation | ||||
| HRI_coex | No-HRI | HRI_coex | No-HRI | ||
| #1 | 0 (not complex) 10 (highly complex) | 0.76 | 0.74 | 2.21 | 1.96 |
| #2 | 0 (not complex) 10 (highly complex) | 2.57 | 2.71 | 2.16 | 2.37 |
| #3 | 0 (not complex) 10 (highly complex) | 1.28 | 1.23 | 2.23 | 2.33 |
| #4 | 0 (not complex) 10 (highly complex) | 0.73 | 0.95 | 2.13 | 2.30 |
| #5 | 0 (not complex) 10 (highly complex) | 1.97 | 1.95 | 2.34 | 2.53 |
| #6 | 0 (not complex) 10 (highly complex) | 2.07 | 1.38 | 2.63 | 2.26 |
| #7 | 0 (strongly disagree) 10 (strongly agree) | 1.90 | NA | 2.11 | NA |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Caterino, M.; Rinaldi, M.; Di Pasquale, V.; Greco, A.; Miranda, S.; Macchiaroli, R. A Human Error Analysis in Human–Robot Interaction Contexts: Evidence from an Empirical Study. Machines 2023, 11, 670. https://doi.org/10.3390/machines11070670
Caterino M, Rinaldi M, Di Pasquale V, Greco A, Miranda S, Macchiaroli R. A Human Error Analysis in Human–Robot Interaction Contexts: Evidence from an Empirical Study. Machines. 2023; 11(7):670. https://doi.org/10.3390/machines11070670
Chicago/Turabian StyleCaterino, Mario, Marta Rinaldi, Valentina Di Pasquale, Alessandro Greco, Salvatore Miranda, and Roberto Macchiaroli. 2023. "A Human Error Analysis in Human–Robot Interaction Contexts: Evidence from an Empirical Study" Machines 11, no. 7: 670. https://doi.org/10.3390/machines11070670