
Combined Use of sEMG and Inertial Sensing to Evaluate Biomechanical Overload in Manufacturing: An On-the-Field Experience †
 ,
,  , ,
, ,
Abstract
:1. Introduction
2. Materials and Methods
2.1. Setting and Subjects
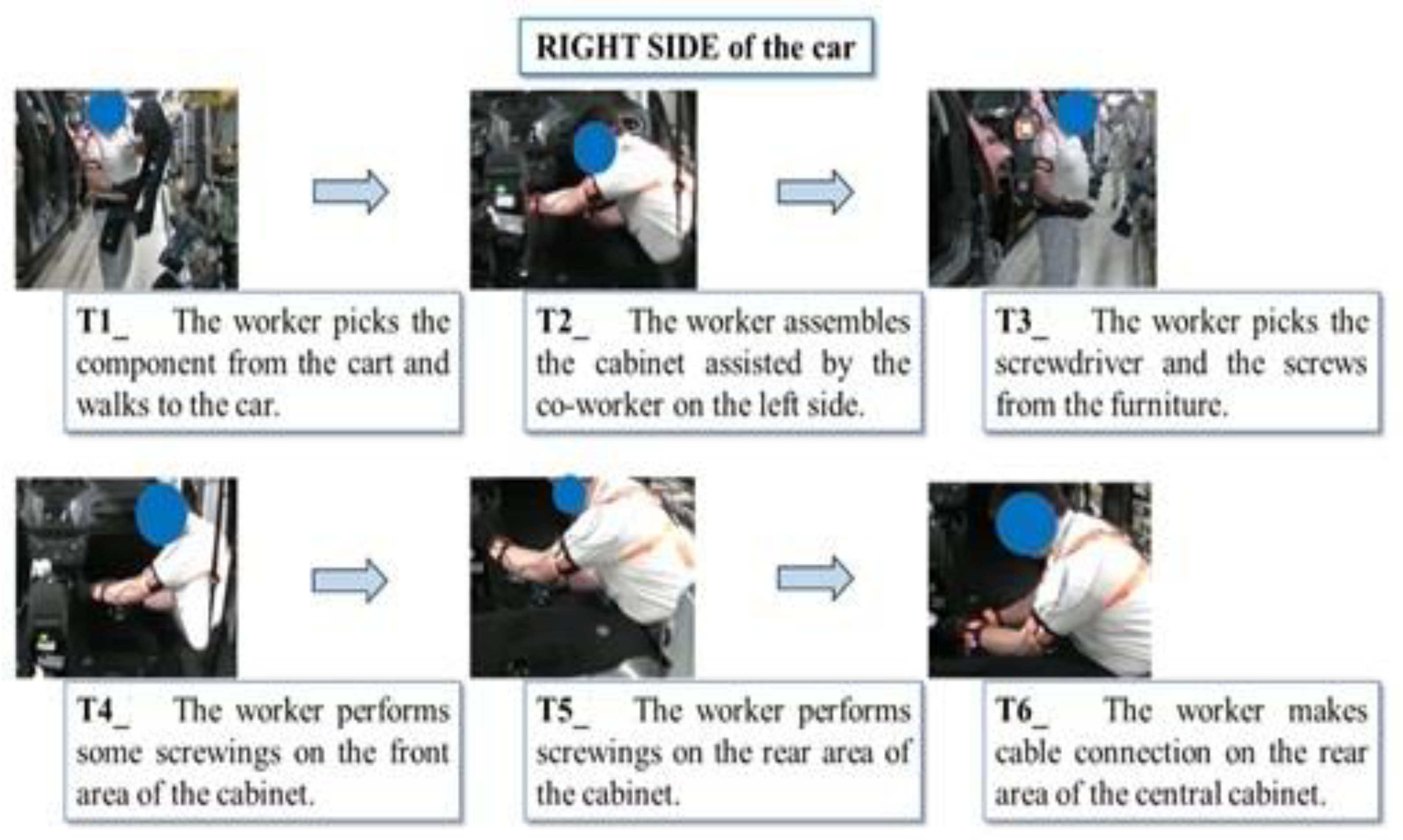
2.2. Working Activity Description
2.3. Instrumentation, Procedure, and Data Acquisition
2.3.1. Acquisition and Processing of sEMG Signals
2.3.2. Body Motion Study
2.4. Results Analysis Methodology
3. Results
3.1. Electromyographic Signal Analysis
3.2. Kinematic Analysis
4. Discussion
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Schneider, E.; Irastorzav, X. OSH in Figures: Work-Related Musculoskeletal Disorders in the EU—Facts and Figures. European Agency for Safety and Health at Work (EU-OSHA). 2010. Available online: https://osha.europa.eu/en/tools-and-publications/publications/reports/TERO09009ENC (accessed on 31 January 2023).
- Da Costa, B.R.; Vieira, E.R. Risk factors for work-related musculoskeletal disorders: A systematic review of recent longitudinal studies. Am. J. Ind. Med. 2010, 53, 285–323. [Google Scholar] [CrossRef]
- Punnett, L. Musculoskeletal disorders and occupational exposures: How should we judge the evidence concerning the causal association? Scand. J. Public. Health 2014, 42 (Suppl. S13), 49–58. [Google Scholar] [CrossRef] [Green Version]
- Bernard, P.B. Musculoskeletal Disorders and Workplace Factors: A Critical Review of Epidemiologic Evidence for Work-Related Musculoskeletal Disorders of Neck, Upper Extremity, and Low Back; National Institute for Occupational Safety and Health: Cincinnati, OH, USA, 1997. Available online: https://www.cdc.gov/niosh/docs/97-141/default.html (accessed on 31 January 2023).
- Takala, E.P.; Pehkonen, I.; Forsman, M.; Hansson, G.Å.; Mathiassen, S.E. Systematic evaluation of observational methods assessing biomechanical exposures at work. Scand. J. Work. Environ. Health 2010, 36, 3–24. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Kee, D.; Karwowski, W. A comparison of three observational techniques for assessing postural loads in industry. Int. J. Occup. Saf. Ergon. 2007, 13, 3–14. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Karhu, O.; Kansi, P.; Kuorinka, I. Correcting working postures in industry: A practical method for analysis. Appl. Ergon. 1977, 8, 199–201. [Google Scholar] [CrossRef] [PubMed]
- Brandl, C.; Mertens, A.; Schlick, C.M. Ergonomic analysis of working postures using OWAS in semi-trailer assembly, applying an individual sampling strategy. Int. J. Occup. Saf. Ergon. 2017, 23, 110–117. [Google Scholar] [CrossRef] [PubMed]
- McAttamney, L.; Corlett, E.N. RULA: A survey method for the investigation of work-related upper limb disorders. Appl. Ergon. 1993, 24, 91–99. [Google Scholar] [CrossRef] [PubMed]
- Hignett, S.; McAtamney, L. Rapid entire body assessment (REBA). Appl. Ergon. 2000, 31, 201–205. [Google Scholar] [CrossRef]
- Schaub, K.; Caragnano, G.; Britzke, B.; Bruder, R. The European Assembly Worksheet. Theor. Issues Ergon. Sci. 2013, 14, 616–639. [Google Scholar] [CrossRef]
- Vieira, E.R.; Kumar, S. Working postures: A literature review. J. Occup. Rehabil. 2004, 14, 143–159. [Google Scholar] [CrossRef]
- Blab, F.; Avci, O.; Daub, U.; Schneider, U. New approaches for analysis in ergonomics: From paper and pencil methods to biomechanical simulation. In 16. Internationales Stuttgarter Symposium; Bargende, M., Reuss, H.C., Wiedemann, J., Eds.; Springer: Wiesbaden, Germany, 2016. [Google Scholar] [CrossRef]
- Battini, D.; Persona, A.; Sgarbossa, F. Innovative real-time system to integrate ergonomic evaluations into warehouse design and management. Comput. Ind. Eng. 2014, 77, 1–10. [Google Scholar] [CrossRef]
- Ferguson, S.A.; Allread, G.W.; Le, P.; Rose, J.; Marras, W.S. Shoulder Muscle Fatigue During Repetetive Tasks as Measured by Electromyography and Near-Infrared Spectroscopy. Hum. Factors 2013, 55, 1077–1087. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Peppoloni, L.; Filippeschi, A.; Ruffaldi, E.; Avizzano, C.A. (WMSDs issue) A novel wearable system for the online assessment of risk for biomechanical load in repetitive efforts. Int. J. Ind. Ergon. 2015, 37, 563–571. [Google Scholar] [CrossRef]
- Vignais, N.; Miezal, M.; Bleser, G.; Mura, K.; Gorecky, D.; Marin, F. Innovative system for real-time ergonomic feedback in industrial manufacturing. Appl. Ergon. 2013, 44, 566–574. [Google Scholar] [CrossRef] [PubMed]
- Vignais, N.; Bernard, F.; Touvenot, G.; Sagot, J.C. Physical risk factors identification based on body sensor network combined to videotaping. Appl. Ergon. 2017, 65, 410–417. [Google Scholar] [CrossRef] [PubMed]
- Ghasemzadeh, H.; Jafari, R.; Prabhakaran, B. A Body Sensor Network with Electromyogram and Inertial Sensors: Multi-Modal Interpretation of Muscular Activities. IEEE Trans. Inf. Technol. Biomed. 2010, 14, 198–206. [Google Scholar] [CrossRef]
- Ranavolo, A.; Draicchio, F.; Varrecchia, T.; Silvetti, A.; Iavicoli, S. Wearable Monitoring Devices for Biomechanical Risk Assessment at Work.: Current Status and Future Challenges—A Systematic Review. Int. J. Environ. Res. Public Health 2018, 15, 2001. [Google Scholar] [CrossRef] [Green Version]
- Merletti, R.; Farina, D. Surface Electromyography: Physiology, Engineering and Applications; IEEE Press/J Wiley: Hoboken, NJ, USA, 2016. [Google Scholar] [CrossRef]
- Pigini, L.; Colombini, D.; Rabuffetti, M.; Ferrarin, M. Tecniche di acquisizione ed analisi del segnale elettromiografico per lo studio del sovraccarico biomeccanico occupazionale. Med. Lav. 2010, 101, 118–133. [Google Scholar]
- Draicchio, F.; Silvetti, A.; Ranavolo, A. Il contributo dell’elettromiografia di superficie (sEMG) alla valutazione del rischio biomeccanico nelle attività industriali. G. Ital. Med. Lav. Erg. 2011, 33, 226–229. [Google Scholar]
- Filippeschi, A.; Schmitz, N.; Miezal, M.; Bleser, G.; Ruffaldi, E.; Stricker, D. Survey of Motion Tracking Methods Based on Inertial Sensors: A Focus on Upper Limb Human Motion. Sensors 2017, 17, 1257. [Google Scholar] [CrossRef] [Green Version]
- Caputo, F.; Greco, A.; D’Amato, E.; Notaro, I.; Lo Sardo, M.; Spada, S.; Ghibaudo, L. A Human Postures Inertial Tracking System for Ergonomic Assessments (Conference Paper). In Proceedings of the 20th Congress of the International Ergonomics Association (IEA 2018), Florence, Italy, 26–30 August 2018; Bagnara, S., Tartaglia, R., Albolino, S., Alexander, T., Fujita, Y., Eds.; Advances in Intelligent Systems and Computing; Springer: Cham, Switzerland, 2018; Volume 825. [Google Scholar] [CrossRef]
- Poitras, I.; Bielmann, M.; Campeau-Lecours, A.; Mercier, C.; Bouyer, L.J.; Roy, J.-S. Validity of Wearable Sensors at the Shoulder Joint: Combining Wireless Electromyography Sensors and Inertial Measurement Units to Perform Physical Workplace Assessments. Sensors 2019, 19, 1885. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Merino, G.; da Silva, L.; Mattos, D.; Guimarães, B.; Merino, E. Ergonomic evaluation of the musculoskeletal risks in a banana harvesting activity through qualitative and quantitative measures, with emphasis on motion capture (Xsens) and EMG. Int. J. Ind. Ergon. 2019, 69, 80–89. [Google Scholar] [CrossRef]
- Monaco, M.G.L.; Fiori, L.; Marchesi, A.; Greco, A.; Ghibaudo, L.; Spada, S.; Caputo, F.; Miraglia, N.; Draicchio, F. Biomechanical overload evaluation in manufacturing: A novel approach with sEMG and inertial motion capture integration(Conference Paper). In Proceedings of the 20th Congress of the International Ergonomics Association (IEA 2018), Florence, Italy, 26–30 August 2018; Bagnara, S., Tartaglia, R., Albolino, S., Alexander, T., Fujita, Y., Eds.; Advances in Intelligent Systems and Computing; Springer: Cham, Switzerland, 2018. [Google Scholar] [CrossRef]
- Barbero, M.; Merletti, R.; Rainoldi, A. Atlas of Muscle Innervation Zones: Understanding Surface Electromyography and Its Applications; Springer: Milan, Italy, 2012. [Google Scholar] [CrossRef]
- Varrecchia, T.; De Marchis, C.; Rinaldi, M.; Draicchio, F.; Serrao, M.; Schmid, M.; Conforto, S.; Ranavolo, A. Lifting activity assessment using surface electromyographic features and neural networks. Int. J. Ind. Ergon. 2018, 66, 1–9. [Google Scholar] [CrossRef]
- Ranaldi, S.; De Marchis, C.; Conforto, S. An automatic, adaptive, information-based algorithm for the extraction of the sEMG envelope. J. Electromyogr. Kinesiol. 2018, 42, 1–9. [Google Scholar] [CrossRef]
- Goubert, D.; De Pauw, R.; Meeus, M.; Willems, T.; Cagnie, B.; Schouppe, S.; Van Oosterwijck, J.; Dhondt, E.; Danneels, L. Lumbar muscle structure and function in chronic versus recurrent low back pain: A cross-sectional study. Spine J. 2017, 17, 1285–1296. [Google Scholar] [CrossRef]
- Wai, E.K.; Roffey, D.M.; Bishop, P.; Kwon, B.K.; Dagenais, S. Causal assessment of occupational bending or twisting and low back pain: Results of a systematic review. Spine J. 2010, 10, 76–88. [Google Scholar] [CrossRef]
- Porta, M.; Pau, M.; Orrù, P.F.; Nussbaum, M.A. Trunk Flexion Monitoring among Warehouse Workers Using a Single Inertial Sensor and the Influence of Different Sampling Durations. Int. J. Environ. Res. Public Health 2020, 17, 7117. [Google Scholar] [CrossRef]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| W1 | W2 | W3 | ||||
|---|---|---|---|---|---|---|
| Trunk Muscle Side | Trunk Muscle Side | Trunk Muscle Side | ||||
| Right side of the workstation | Left | Right | Left | Right | Left | Right |
| EST | 6.7 ± 1.9 | 16.9 ± 2.7 | 8.9 ± 2.4 | 10.5 ± 2.2 | 15.7 ± 5 | 23 ± 3 |
| ESL | 10.4 ± 1.7 | 14.2 ± 3.6 | 14.6 ± 3.8 | 22 ± 6 | 13.7 ± 3.2 | 16.5 ± 2.8 |
| M | 10.1 ± 2 | 15.5 ± 2.7 | 12.9 ± 4 | 9.9 ± 2.2 | 14 ± 1.4 | 18.2 ± 2.8 |
| Left side of the workstation | Left | Right | Left | Right | Left | Right |
| EST | 9.5 ± 1.6 | Left | 17.2 ± 5.3 | 11.7 ± 2.3 | 17.2 ± 1.6 | 23.4 ± 4 |
| ESL | 18.5 ± 5.7 | 12.9 ± 2.8 | 20.6 ± 4.1 | 25.2 ± 7.4 | 13.6 ± 2.4 | 15.7 ± 2.7 |
| M | 14 ± 6.9 | 13.8 ± 4.3 | 11.2 ± 2.2 | 14.6 ± 6.7 | 14.2 ± 3.4 | 17.8 ± 4.4 |
| Reference Ranges | 20–60° | >60° | |||||
|---|---|---|---|---|---|---|---|
| W1 | W2 | W3 | W1 | W2 | W3 | ||
| Right side of the workstation | Mean value (±SD) [°] | 40.63 ± 6.25 | 39.32 ± 11.35 | 46.40 ± 4.29 | - | 77.90 ± 8.23 | - |
| Peak value [°] | 50.71 ± 4.96 | 54.41 ± 3.74 | 56.55 ± 2.97 | - | 86.52 ± 8.60 | - | |
| Mean value (±SD) of posture duration [t] | 19.54 ± 2.58 | 12.00 ± 6.69 | 22.18 ± 1.71 | 0 | 10.82 ± 1.65 | 0 | |
| Posture duration in % of working cycle [%] | 34 | 21 | 38 | 0 | 19 | 0 | |
| Left side of the workstation | Mean value (±SD) [°] | 38.83 ± 5.61 | 37.26 ± 5.28 | 43.15 ± 6.00 | - | 82.77 ± 4.99 | 65.29 ± 1.42 |
| Peak value [°] | 49.84 ± 7.86 | 50 ± 6.61 | 56.52 ± 3.52 | - | 94.06 ± 6.47 | 71.01 ± 0.87 | |
| Mean value (±SD) of posture duration [t] | 17.32 ± 5.75 | 11.83 ± 3.40 | 16.85 ± 3.84 | 0 | 17.89 ± 7.15 | 6.37 ± 2.72 | |
| Posture duration in % of working cycle [%] | 30 | 20 | 29 | 0 | 31 | 11 | |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Monaco, M.G.L.; Fiori, L.; Marchesi, A.; Muoio, M.; Garzillo, E.M.; Caputo, F.; Miraglia, N.; Lamberti, M.; Silvetti, A.; Draicchio, F. Combined Use of sEMG and Inertial Sensing to Evaluate Biomechanical Overload in Manufacturing: An On-the-Field Experience. Machines 2023, 11, 417. https://doi.org/10.3390/machines11040417
Monaco MGL, Fiori L, Marchesi A, Muoio M, Garzillo EM, Caputo F, Miraglia N, Lamberti M, Silvetti A, Draicchio F. Combined Use of sEMG and Inertial Sensing to Evaluate Biomechanical Overload in Manufacturing: An On-the-Field Experience. Machines. 2023; 11(4):417. https://doi.org/10.3390/machines11040417
Chicago/Turabian StyleMonaco, Maria Grazia Lourdes, Lorenzo Fiori, Agnese Marchesi, Mariarosaria Muoio, Elpidio Maria Garzillo, Francesco Caputo, Nadia Miraglia, Monica Lamberti, Alessio Silvetti, and Francesco Draicchio. 2023. "Combined Use of sEMG and Inertial Sensing to Evaluate Biomechanical Overload in Manufacturing: An On-the-Field Experience" Machines 11, no. 4: 417. https://doi.org/10.3390/machines11040417