1. Introduction
Vertical vibrations on agricultural tractors due to soil irregularities represent a major cause of occupational diseases or musculoskeletal disorders for agricultural operators. The control of noise and vibration on the operator is of interest to the (Italian) National Institute for Insurance against Accidents at Work (INAIL). A broad amount of literature exists on the effects of whole-body vibration exposure on operators of industrial and agricultural machines [
1,
2,
3,
4,
5,
6] and on seat suspension systems for agricultural tractors and off-road vehicles [
7,
8,
9]. Several seat or cabin suspension systems are commercially available to reduce transmitted vibrations, including passive, semi-active, or active solutions. According to ISO 2631 [
10], the frequency band of interest for the whole-body vibration ranges from 0.5 to 80 Hz. In this frequency range, acceleration is frequency weighted, and larger weights occur between 2 and 25 Hz (weights larger than 0.5). However, the vibration due to soil irregularities is low-pass mechanically filtered by the primary tractor suspension [
11] and by the seat cushion [
12], yielding a significant frequency content below 10 Hz. This is confirmed by Appendix 3 of Annex XIV of the European Regulation [
13] regarding general requirements for the approval of agricultural and forestry vehicles.
Passive solutions are typically mechanical [
14,
15] or pneumatic [
16] and generally allow for an attenuation of the vibrations beyond a given cut-off frequency or at a specific frequency. Semi-active solutions typically adjust the damping coefficient to adapt the system’s response to the excitation due to soil irregularities. The technologies commonly employed [
17] are servo/solenoid valve dampers, magneto-rheological and electro-rheological dampers and electromagnetic dampers. Semi-active solutions based on pneumatic technology (e.g., multi-chamber devices) typically adjust the stiffness [
18]. They guarantee better performances than passive isolation systems but typically require sensors and an electronic control unit. Active solutions are characterized by an actuation system based on hydraulic, direct-drive electromagnetic, electromagnetic hydrostatic, or geared electric motor technology [
19,
20,
21,
22].
A prototype of an active suspension system for the operator seat has been developed in the laboratories of INAIL [
23,
24].This prototype has the peculiarity that it can be configured with pneumatic or hydraulic actuation because of the presence of both the pneumatic and hydraulic power supply on board an agricultural machine.
In this paper, a hydraulic configuration is considered that includes a hydraulic cylinder powered by a proportional flow rate control electrovalve. Modeling of hydraulic active suspension systems generally neglects the valve dynamics [
19,
25,
26] for several reasons, for instance because the valve dynamics are considered to be irrelevant or because the model to be controlled would become much more complex. The original contribution of this paper consists in the development of a nonlinear multi-physics model of the hydraulic active suspension system and specifically of the control valve whose parameters were identified after a set of experimental tests. It will be shown that the dynamics of the control valve is not irrelevant, because it has a finite time delay.
The hydraulic system employs an almost incompressible mineral oil that provides a very high power-to-weight ratio, it does not introduce any passive attenuation or amplification in the frequency band of interest for whole body vibrations, and the proportional flow rate control electrovalve allows for precise position control. The hydraulic circuit, as well as the valve, the actuator, and the control system, are numerically modeled in the Simulink environment. The numerical model aims to provide a digital twin of the operator seat to develop and optimize the active control system. For this reason, experimental tests are performed on the hydraulic active suspension, and the prototype responses are compared with those provided by the numerical model. Therefore, the digital twin is updated using data from the experimental campaign on the system. An equivalent simplified model is obtained to design a proper control strategy for the active suspension system. Finally, the controller is tested on the digital twin of the system to assess its performance in isolating vibrations.
3. Hydraulic Active Suspension System Modeling
In this section, the multi-physics model of the hydraulic active suspension system is developed, including the hydraulic circuit, the actuator and the proportional flow rate control valve.
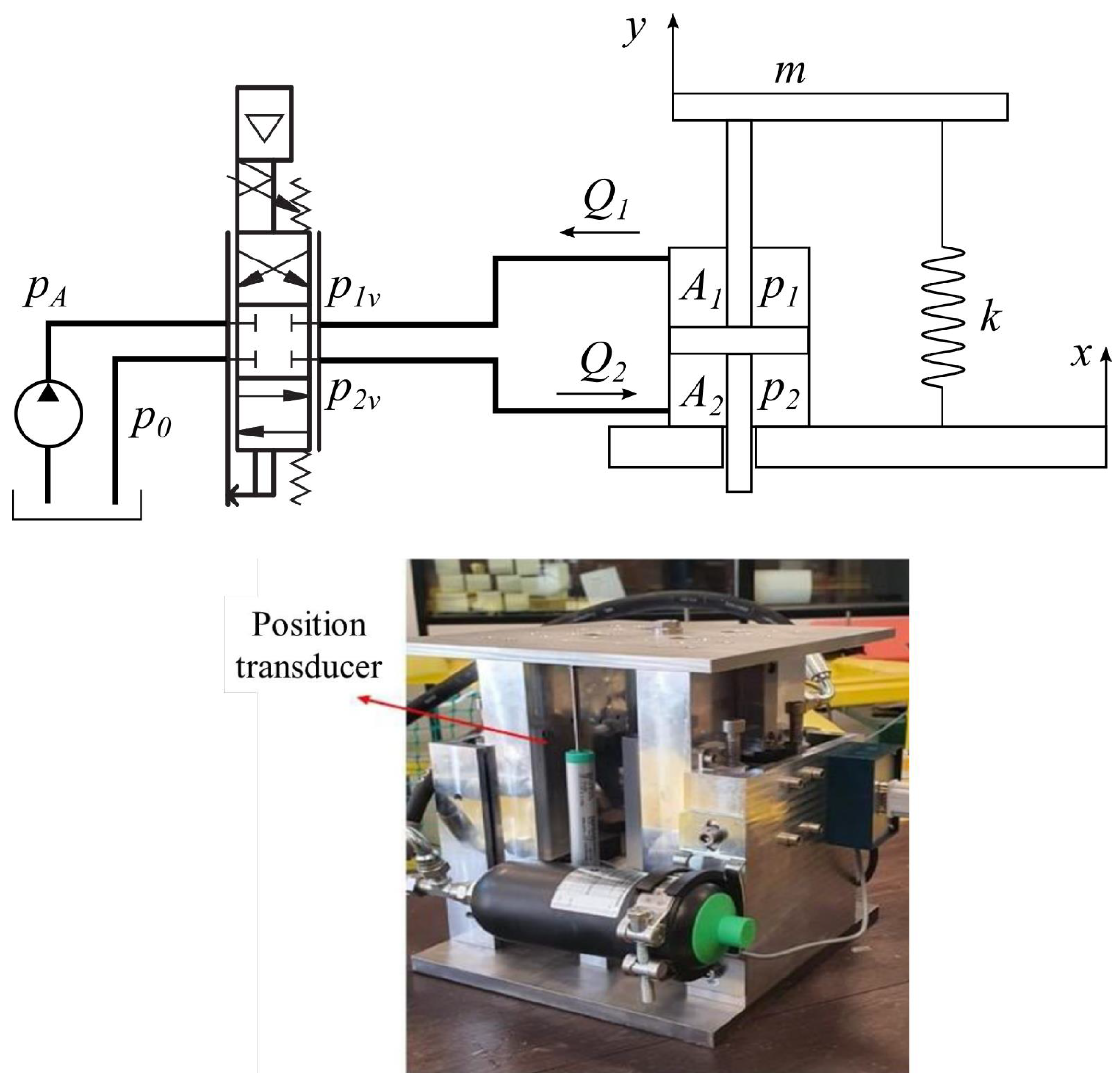
Figure 2 shows the schematic and the testbed of the hydraulic active suspension. The model is described by a set of equations related to: the dynamic equilibrium of the suspended body, the flow rates through hydraulic hoses 1 and 2, the inlet and outlet flow rates through the valve, and the dynamic equilibrium of the valve’s internal spool.
With reference to
Figure 3, the dynamic equilibrium of the suspended body
m gives:
where
y is the displacement of the suspended body of mass
m,
x is the displacement of the vibrating platform acting as a disturbance on the system,
is the relative displacement between the suspended body and the vibrating platform,
k is the equivalent stiffness of the set of springs, and
and
are pressures and cross-sections of the cylinder chambers, respectively. Note that the relative displacement
u is bounded by the cylinder stroke
.
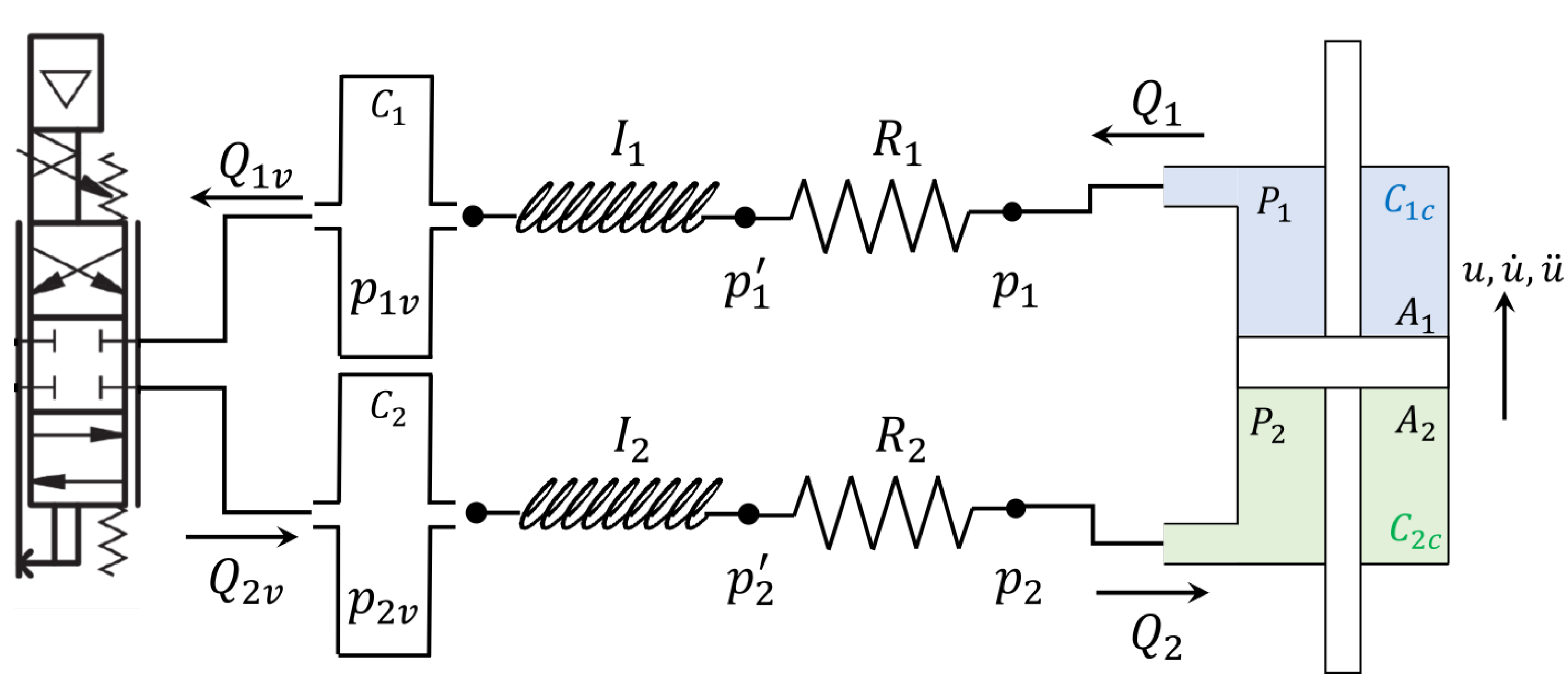
The flow rates through hydraulic hoses 1 and 2 are governed by the equations of the pressure drop along the two pipes and the equations of conservation of mass for the two pipes and the two chambers of the hydraulic actuator [
27]:
where with reference to
Figure 4,
are the volumetric flow rates at pipe connections with the chambers,
are the volumetric flow rates at pipe connections with the valve, and
are the pressures at the pipe connections with the valve. Note that the flow rate
is assumed positive when directed from the valve to the lower chamber of the actuator, and conversely, the flow rate
is assumed positive when directed from the upper chamber of the actuator to the valve. Therefore, positive values of the flow rates are associated with a positive relative velocity
.
The hydraulic resistance
, inertance
, and capacitance
of the hydraulic hoses as well as the capacitance of the hydraulic chambers
are defined as:
where
,
and
are the density, the compressibility modulus, and the dynamic viscosity of the mineral oil, respectively;
and
are the lengths and diameters of the hydraulic hose, respectively;
,
D, and
d are the stroke, the external diameter, and the internal diameter of the cylinder chambers, respectively.
The inlet and outlet flow rates through the valve are given by:
where
is the flow coefficient of the valve,
is the displacement of the internal spool, the product
is the cross-section of the hydraulic valve, and
and
are the feed and discharge pressures of the hydraulic supply circuit. Note that when the position of the internal spool of valve
is positive, the valve connects the feed way to the bottom chamber of the actuator, and the top chamber of the actuator is connected to the discharge way. Positive values of the flow rates
and
generate a positive relative velocity of the suspended body
.
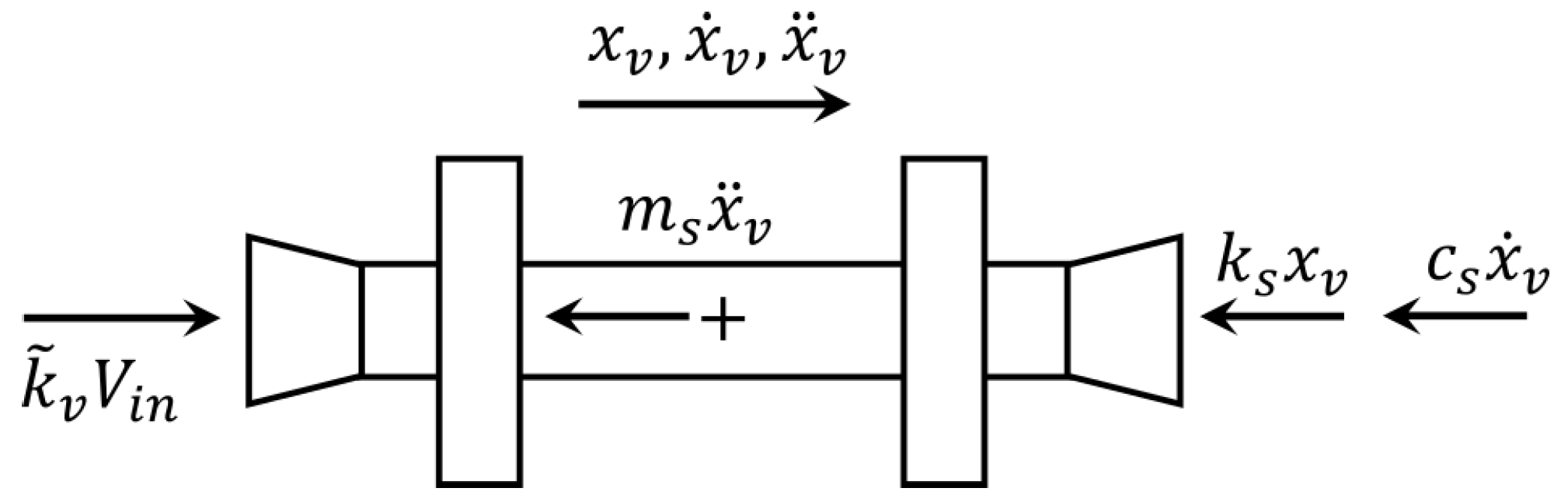
Moreover, the valve’s spool dynamic equation can be obtained using the free-body diagram in
Figure 5, where
is the mass of the internal spool,
is a stiffness,
is a viscous damping coefficient, and
is a the proportional coefficient of the electromechanical power system of the valve expressed in N/V.
The force terms shown in
Figure 5 can be recast to obtain:
where
and
are the natural frequency and damping ratio of the proportional valve, respectively,
is the static gain (m/V) of the proportional valve, and
is the command tension that is bounded to ±10 V and acts with a finite delay
. Note that the displacement of the internal spool of the valve is bounded between
.
Thus, the hydraulic dynamic system can be described by ten state variables and two input variables ( and x).
The values of the parameters used in the numerical model of the system are introduced hereinafter. The suspension is characterized by a mass of the suspended body kg and an equivalent stiffness of the set of springs N/m. The hydraulic cylinder employed in the active control of the suspension has a stroke of mm, a bore of mm and a rod diameter of mm. The two hydraulic hoses connecting the valve with the two chambers of the cylinder have length m and diameter mm. The feed and discharge pressures of the hydraulic supply circuit are and bar. The flow coefficient of the valve is , and the coefficient mm is such that represents the cross-section area. Note that the flow coefficient is initially estimated, as suggested by the valve manufacturer, using Equation (12) with the nominal operating conditions of the valve, i.e., L/min and bar, and considering the completely open position of the valve. The static gain of the proportional valve is m/V, the natural frequency is rad/s, the damping ratio is , and the maximum displacement of the spool is mm. Finally, the hydraulic fluid is characterized by density kg/m, viscosity kg/(m·s), and the compressibility MPa.
6. Control of the Active Suspension System
The active control system should be able to simultaneously attenuate the acceleration transmitted from the vibrating platform to the suspended body and restore the hydraulic actuator at its half stroke position in order to avoid bottoming effects. These two conflicting requirements are satisfied by considering a slower controller for the position and a faster one for the acceleration.
The model of the active suspension system is built considering the transfer function
, a proportional position controller
on the relative position signal
u to maintain the actuator at its half stroke position, and an integrative controller
on the acceleration
of the vibrating platform, since the proportional flow rate hydraulic valve provides a relative velocity
proportional to the command tension
. Therefore, the control signal
can be expressed as the sum of two terms
and
generated by the controller
and
, respectively:
The coefficients of the proportional and integrative controller are V/m and Vs/m, respectively.
The model shown in
Figure 11 can be reduced in order to evaluate the transfer function
, which represents the transmissibility of the active suspension system.
Figure 12 shows the magnitude and the phase of the transfer function
and highlights that the active control is able to attenuate the acceleration input up to 9 Hz, i.e., in almost all the frequency bands of interest for the whole-body vibrations. The transmissibility of the active suspension is compared with the transmissibility of the passive system, characterized by the same value of the suspended mass
m and of the stiffness
k with the presence of a viscous damper, acting in parallel to the stiffness, such as to produce a damping factor
. Although the active control system slightly amplifies the acceleration above 9 Hz, the acceleration spectrum that is input to the vibrating platform is given by the soil irregularities that are low-pass filtered by the suspension systems (tires, front axle suspension) of the agricultural machine [
11]. Moreover, the vibrations are generally attenuated above 5 Hz by the seat cushion placed between the suspended mass and the operator [
12]. Therefore, the input acceleration
to the vibrating platform is generally not relevant above 9 Hz. The passive system amplifies the vibrations in the band 0–4 Hz and attenuates the vibrations above 4 Hz.
In order to asses the effectiveness of the proposed control, the response of the model in
Figure 11 is evaluated for different acceleration signals of the vibrating platform.
A first test considers a rapid variation of the vibrating platform position, obtained using a cycloidal law of the acceleration
.
Figure 13 shows the response of the active suspension and of the passive system for a position variation of 30 mm in 0.5 s of the vibrating platform. The acceleration results highlight that, for the active system, the feedforward controller is able to compensate for the acceleration of the vibrating platform, while the passive system introduces higher accelerations. However, the control system starts to reduce the acceleration of the suspended body with a delay equal to the finite delay
considered in the model. Moreover, the displacement results show that the deformation
u of the passive system is smaller than the deformation of the active system, but the feedback controller slowly resets the actuator in its central position by reducing the relative position error so that the system is ready to deal with other disturbances.
Figure 14 shows the command tension
and the spool position
for a rapid variation of the vibrating platform position. The results highlight the presence of a finite delay
between the command tension and the actual displacement of the internal spool of the valve.
A second test simulates the effects of random soil irregularities. Due to the low-pass filtering effect of the tractor suspension system and of the seat cushion, the input acceleration
is generated as band-limited white noise in the frequency band [0.5, 5] Hz with a power spectral density of
(m/s
)
/Hz.
Figure 15 shows the comparison between the response of the active suspension system and that of the passive system to the random vibration of the vibrating platform. In this case, the acceleration results show that the feedforward controller of the active system is able to isolate the acceleration of the vibrating platform, providing lower acceleration than the passive system. The root mean square value (RMS) of the acceleration
of the vibrating platform is 0.48 m/s
, the RMS of the acceleration
of the suspended body is reduced more than three times to 0.15 m/s
by the active system, and while using the passive system, the RMS of the acceleration
of the suspended body is 0.67 m/s
.
For the tests in
Figure 13 and
Figure 15, the relative displacement
u is within the limits of the suspension system, and the one of the active system is larger than that of the passive system, highlighting the effectiveness of the active system in compensating for the soil irregularities by its own deformation, and thus reducing the acceleration of the suspended mass.
A last test aims at verifying the performance of the controller in Equation (16) on the multi-physics model, using the same input acceleration
generated for the previous test on the equivalent model. As expected, the results in terms of acceleration and displacement are quite similar to the results shown in
Figure 15. The root mean square value of the acceleration
of the suspended body in this case is 0.16 m/s
. Moreover, the multi-physics model provides results that were not available using the equivalent model. In particular,
Figure 16 shows the pressures
and
in the two chambers of the hydraulic actuator and the flow rates
and
between the valve and the actuator. The pressure results show that the pressure of the two chambers oscillates symmetrically around 55 bar, which is the mean value between the
and
, to generate the required control force. The flow rates, according to the positive directions shown in
Figure 4, are equal and comply with the maximum flow rate of the considered electrovalve.


 ,
, 













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}