
A CNN-Based Methodology for Identifying Mechanical Faults in Induction Motors Using Thermography

 , , , ,
, , , ,
Abstract
:1. Introduction
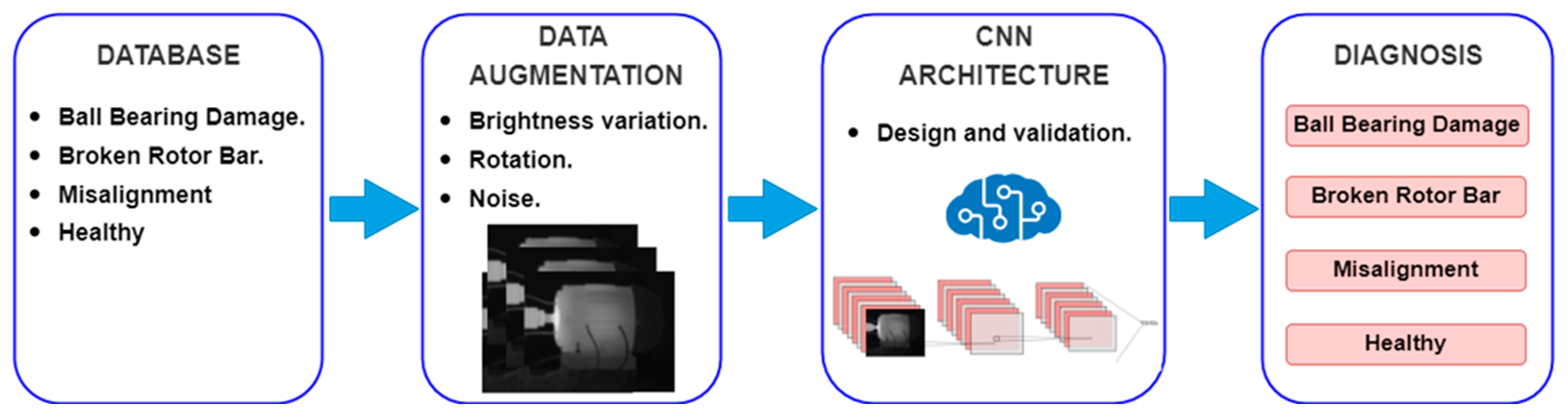
2. Proposed Methodology
2.1. Database (Experimental Setup)
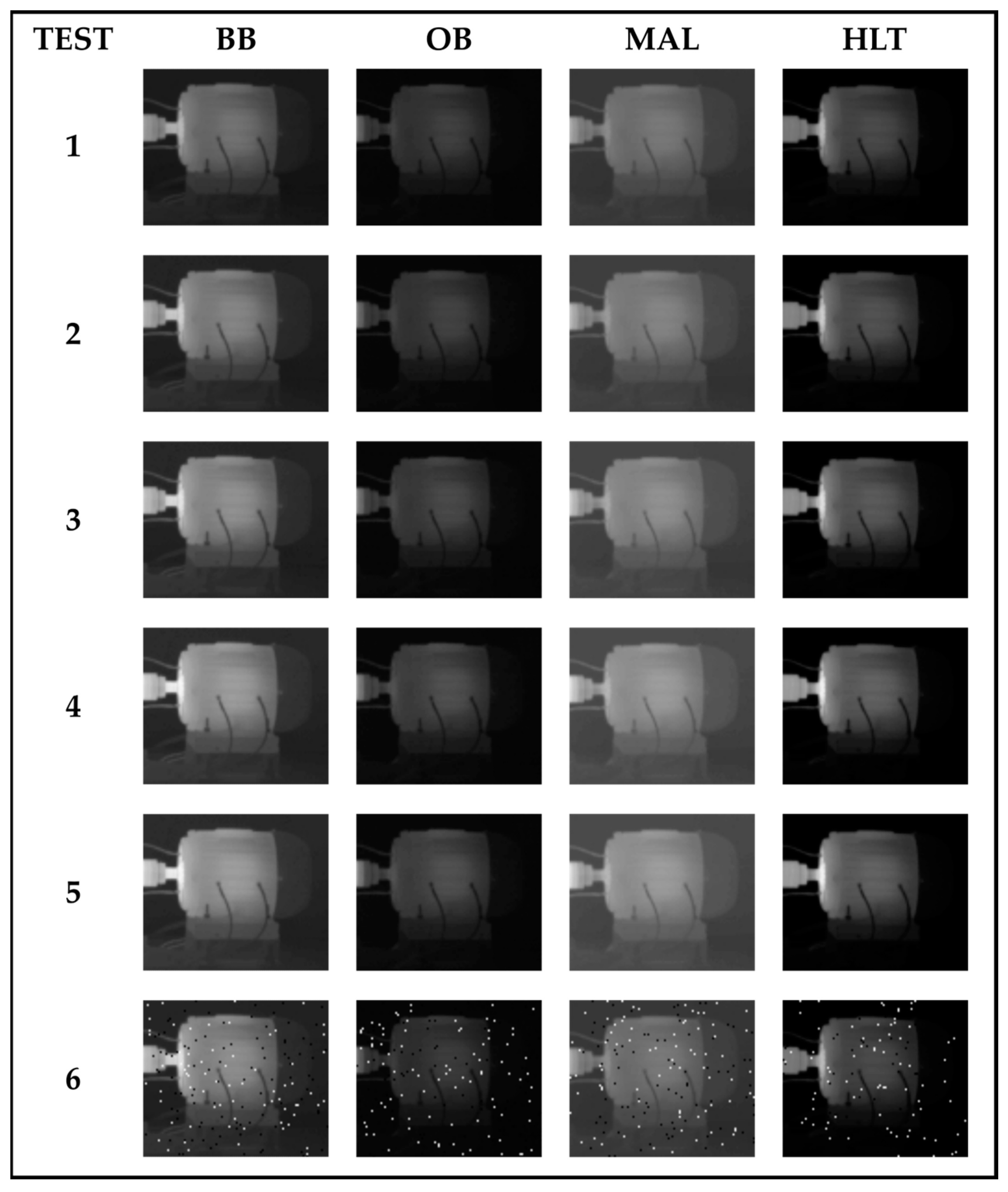
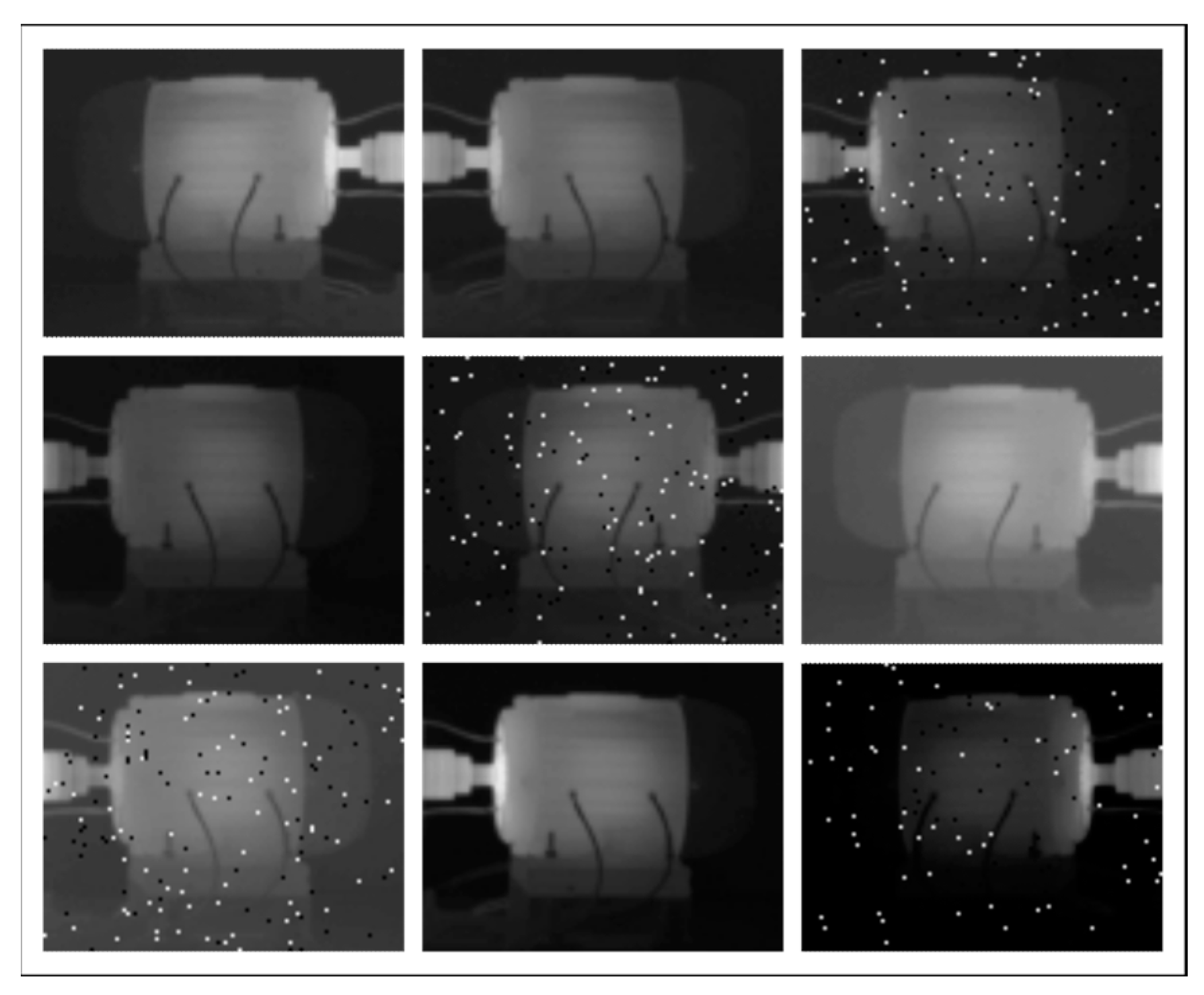
2.2. Data Augmentation
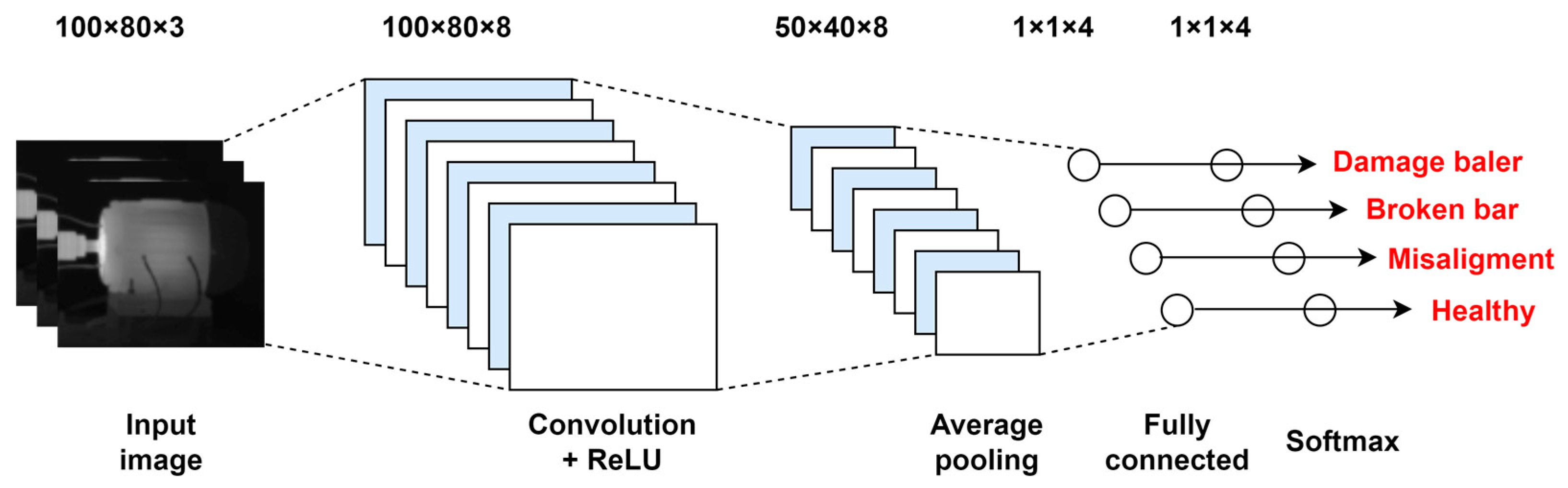
2.3. CNN Architecture and Diagnosis
3. Results
3.1. Database Augmentation
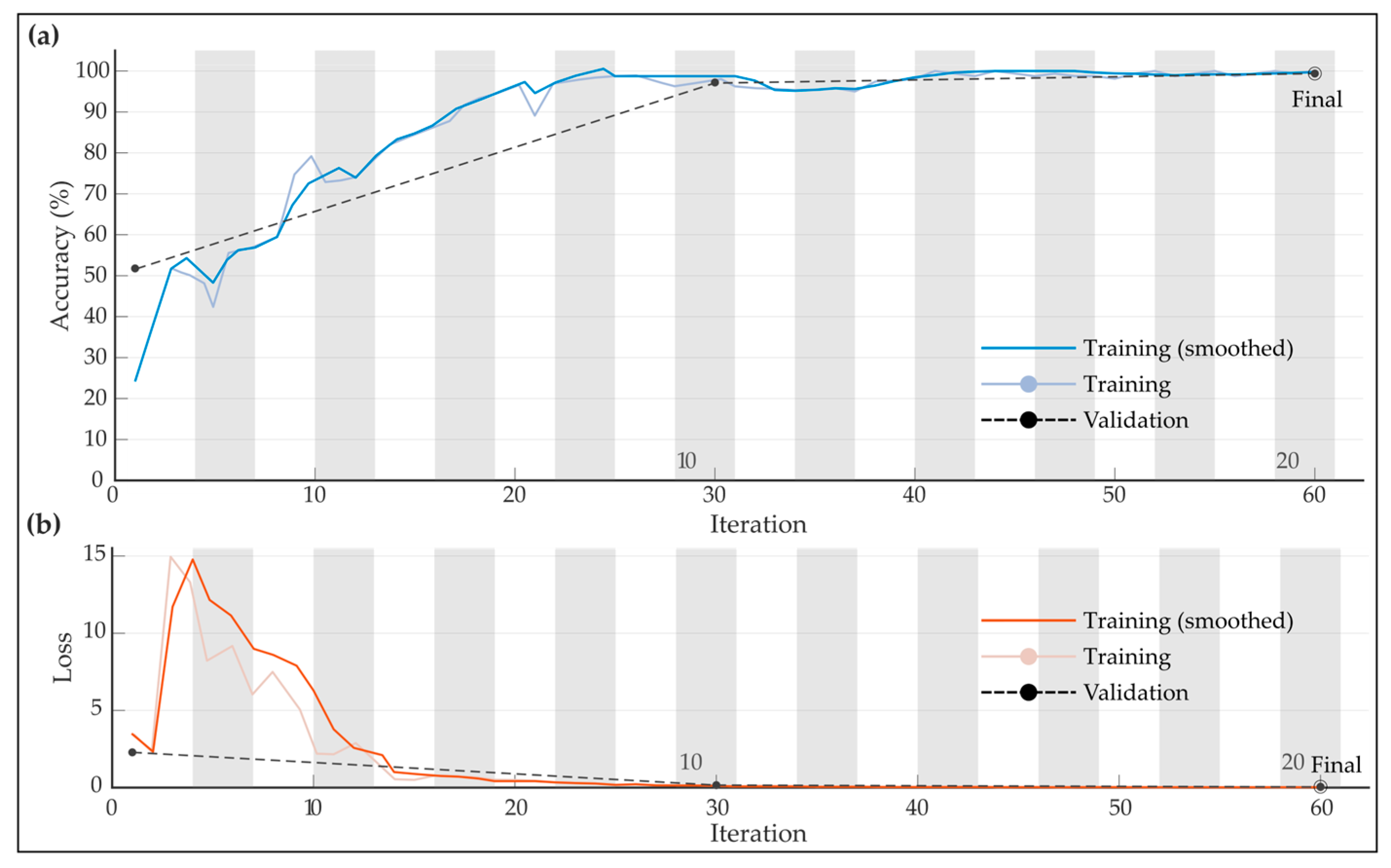
3.2. CNN Results
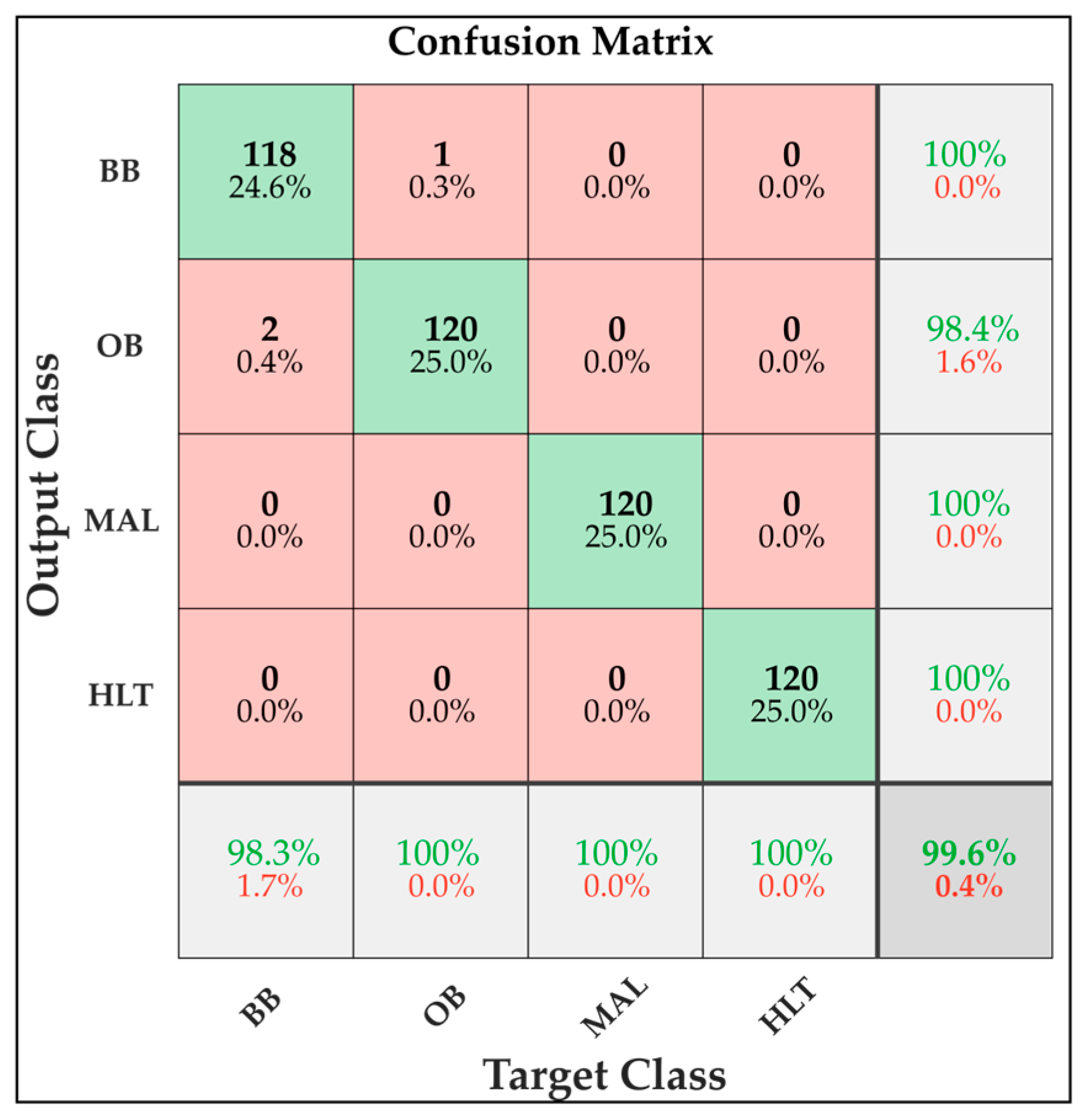
3.2.1. CNN with Original Database
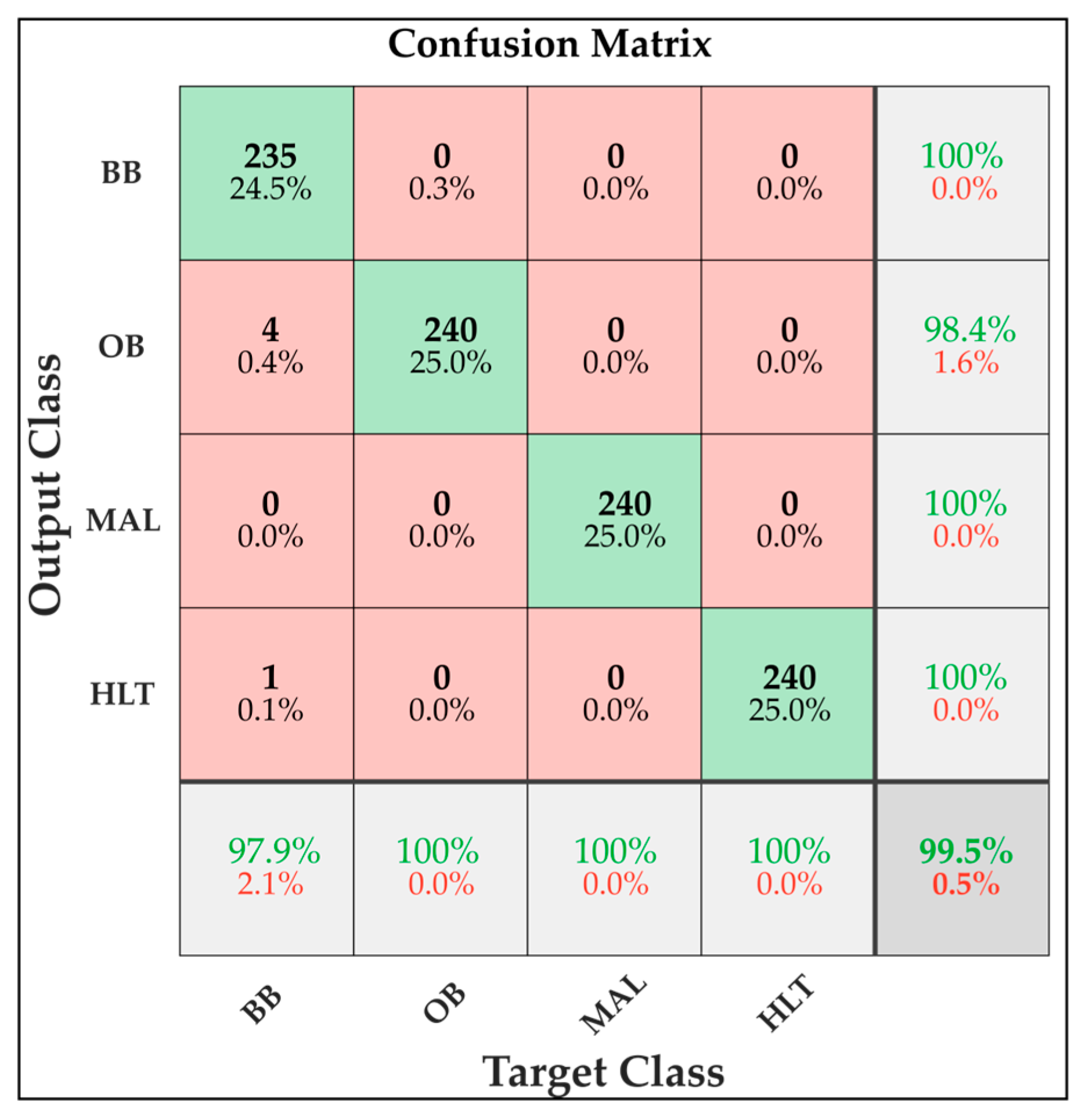
3.2.2. CNN with Horizontal Reflection
4. Discussion
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Yatsugi, K.; Pandarakone, S.E.; Mizuno, Y.; Nakamura, H. Common Diagnosis Approach to Three-Class Induction Motor Faults Using Stator Current Feature and Support Vector Machine. IEEE Access 2023, 11, 24945–24952. [Google Scholar] [CrossRef]
- Tran, M.-Q.; Amer, M.; Dababat, A.; Abdelaziz, A.Y.; Dai, H.-J.; Liu, M.-K.; Elsisi, M. Robust fault recognition and correction scheme for induction motors using an effective IoT with deep learning approach. Measurement 2023, 207, 112398. [Google Scholar] [CrossRef]
- Choudhary, A.; Mishra, R.K.; Fatima, S.; Panigrahi, B.K. Multi-input CNN based vibro-acoustic fusion for accurate fault diagnosis of induction motor. Eng. Appl. Artif. Intell. 2023, 120, 105872. [Google Scholar] [CrossRef]
- Yakhni, M.F.; Cauet, S.; Sakout, A.; Assoum, H.; Etien, E.; Rambault, L.; El-Gohary, M. Variable speed induction motors’ fault detection based on transient motor current signatures analysis: A review. Mech. Syst. Signal Process. 2023, 184, 109737. [Google Scholar] [CrossRef]
- Valtierra-Rodriguez, M.; Rivera-Guillen, J.R.; De Santiago-Perez, J.J.; Perez-Soto, G.I.; Amezquita-Sanchez, J.P. Expert System Based on Autoencoders for Detection of Broken Rotor Bars in Induction Motors Employing Start-Up and Steady-State Regimes. Machines 2023, 11, 156. [Google Scholar] [CrossRef]
- Mishra, S.K.; Shakya, P.; Babureddy, P.; Vignesh, S.A. An approach to improve high-frequency resonance technique for bearing fault diagnosis. Measurement 2021, 178, 109318. [Google Scholar] [CrossRef]
- Lee, Y.; Park, B.; Jo, M.; Lee, J.; Lee, C. A quantitative diagnostic method of feature coordination for machine learning model with massive data from rotary machine. Exp. Syst. Appl. 2023, 214, 119117. [Google Scholar] [CrossRef]
- Li, Y.; Yang, Y.; Feng, K.; Zuo, M.J.; Chen, Z. Automated and Adaptive Ridge Extraction for Rotating Machinery Fault Detection. IEEE ASME Trans. Mechatron. 2023, 1–11. [Google Scholar] [CrossRef]
- Bautista-Morales, M.R.; Patiño-López, L.D. Acoustic detection of bearing faults through fractional harmonics lock-in amplification. Mech. Syst. Signal Proc. 2023, 185, 109740. [Google Scholar] [CrossRef]
- Al Shorman, O.; Alkahatni, F.; Masadeh, M. Sounds and acoustic emission-based early fault diagnosis of induction motor: A review study. Adv. Mech. Eng. 2021, 13. [Google Scholar] [CrossRef]
- Wang, H.; Chen, S.; Zhai, W. Data-driven adaptive chirp mode decomposition with application to machine fault diagnosis under non-stationary conditions. Mech. Syst. Signal Proc. 2023, 188, 109997. [Google Scholar] [CrossRef]
- Guo, J.; He, Q.; Zhen, D.; Gu, F.; Ball, A.D. Multi-sensor data fusion for rotating machinery fault detection using improved cyclic spectral covariance matrix and motor current signal analysis. Reliab. Eng. Syst. Saf. 2023, 230, 108969. [Google Scholar] [CrossRef]
- Patil, S.; Jalan, A.K.; Marathe, A. Condition Monitoring of Misaligned Rotor System Using Acoustic Sensor by Response Surface Methodology. ASME J. Nondestruct. Eval. 2023, 6, 011002. [Google Scholar] [CrossRef]
- Motahari-Nezhad, M.; Jafari, S.M. Comparison of MLP and RBF neural networks for bearing remaining useful life prediction based on acoustic emission. Proc. Inst. Mech. Eng. J. Eng. Tribol. 2023, 237, 129–148. [Google Scholar] [CrossRef]
- Mutra, R.R.; Reddy, D.M.; Srinivas, J.; Sachin, D.; Rao, K.B. Signal-based parameter and fault identification in roller bearings using adaptive neuro-fuzzy inference systems. J. Braz. Soc. Mech. Sci. Eng. 2023, 45, 45. [Google Scholar] [CrossRef]
- Zamudio-Ramirez, I.; Osornio-Rios, R.A.; Antonino-Daviu, J.A. Smart Sensor for Fault Detection in Induction Motors Based on the Combined Analysis of Stray-Flux and Current Signals: A Flexible, Robust Approach. IEEE Ind. Appl. Mag. 2022, 28, 56–66. [Google Scholar] [CrossRef]
- Lamim Filho, P.C.M.; Rabelo Baccarini, L.M.; Batista, F.B.; Araújo, A.C. Orbit Analysis From a Stray Flux Full Spectrum for Induction Machine Fault Detection. IEEE Sens. J. 2022, 21, 16152–16161. [Google Scholar] [CrossRef]
- Park, Y.; Choi, H.; Shin, J.; Park, J.; Bin Lee, S.; Jo, H. Airgap Flux Based Detection and Classification of Induction Motor Rotor and Load Defects During the Starting Transient. IEEE Trans. Ind. Electron. 2020, 67, 10075–10084. [Google Scholar] [CrossRef]
- Wang, P.; Xiong, H.; He, H. Bearing fault diagnosis under various conditions using an incremental learning-based multi-task shared classifier. Knowl.-Based Syst. 2023, 266, 110395. [Google Scholar] [CrossRef]
- Aguayo-Tapia, S.; Avalos-Almazan, G.; Rangel-Magdaleno, J.d.J.; Paternina, M.R.A. Broken Bar Fault Detection Using Taylor–Fourier Filters and Statistical Analysis. Entropy 2023, 25, 44. [Google Scholar] [CrossRef]
- Tabasi, M.; Mostafavi, M.; Ojaghi, M. Motor Current Signature Analysis for Detecting Local Defects on Rolling-Element Bearings of Induction Motors. Arab. J. Sci. Eng. 2023. [Google Scholar] [CrossRef]
- Nazari, S.; Shokoohi, S.; Moshtagh, J. A Current Noise Cancellation Method Based on Integration of Stator Synchronized Currents for Bearing Fault Diagnosis. IEEE Trans. Instrum. Meas. 2023. [Google Scholar] [CrossRef]
- Lee, J.; Lee, Y.; Kim, N. Detection and analysis of shaft misalignment in application of production and logistics systems using motor current signature analysis. Exp. Syst. Appl. 2023, 217, 119463. [Google Scholar] [CrossRef]
- Elhaija, W.A.; Al-Haija, Q.A. A novel dataset and lightweight detection system for broken bars induction motors using optimizable neural networks. Intell. Syst. Appl. 2023, 17, 200167. [Google Scholar] [CrossRef]
- Halder, S.; Bhat, S.; Dora, B. Start-up transient analysis using CWT and ridges for broken rotor bar fault diagnosis. Electr. Eng. 2023, 105, 221–232. [Google Scholar] [CrossRef]
- Jaros, R.; Byrtus, R.; Dohnal, J.; Danys, L.; Baros, J.; Koziorek, J.; Zmij, P.; Martinek, R. Advanced Signal Processing Methods for Condition Monitoring. Arch. Comput. Methods Eng. 2023, 30, 1553–1577. [Google Scholar] [CrossRef]
- Sun, Q.; Chen, C.; Liu, X. Comparative study of stator current-based and vibration-based methods for railway traction motor bearing cage fault diagnosis at high-speed condition. Struct. Health Monit. 2023, 22, 978–992. [Google Scholar] [CrossRef]
- Aguayo-Tapia, S.; Avalos-Almazan, G.; Rangel-Magdaleno, J.d.J.; Ramirez-Cortes, J.M. Physical Variable Measurement Techniques for Fault Detection in Electric Motors. Energies 2023, 16, 4780. [Google Scholar] [CrossRef]
- Surucu, O.; Gadsden, S.A.; Yawney, J. Condition Monitoring using Machine Learning: A Review of Theory, Applications, and Recent Advances. Exp. Syst. Appl. 2023, 221, 119738. [Google Scholar] [CrossRef]
- Boztas, G. Comparison of acoustic signal–based fault detection of mechanical faults in induction motors using image classification models. Trans. Ins. Meas. Control. 2023. [Google Scholar] [CrossRef]
- Li, X.; Li, Y.; Yan, K.; Shao, H.; Lin, J. Intelligent fault diagnosis of bevel gearboxes using semi-supervised probability support matrix machine and infrared imaging. Reliab. Eng. Syst. Saf. 2023, 230, 108921. [Google Scholar] [CrossRef]
- Glowacz, A. Thermographic fault diagnosis of electrical faults of commutator and induction motors. Eng. Appl. Artif. Intell. 2023, 121, 105962. [Google Scholar] [CrossRef]
- Sharma, K.; Goyal, D.; Kanda, R. Intelligent Fault Diagnosis of Bearings based on Convolutional Neural Network using Infrared Thermography. Proc. Inst. Mech. Eng. 2022, 236, 2439–2446. [Google Scholar] [CrossRef]
- Choudhary, A.; Mian, T.; Fatima, S. Convolutional neural network based bearing fault diagnosis of rotating machine using thermal images. Measurement 2021, 176, 109196. [Google Scholar] [CrossRef]
- Alvarado-Hernandez, A.I.; Zamudio-Ramirez, I.; Jaen-Cuellar, A.Y.; Osornio-Rios, R.A.; Donderis-Quiles, V.; Antonino-Daviu, J.A. Infrared Thermography Smart Sensor for the Condition Monitoring of Gearbox and Bearings Faults in Induction Motors. Sensors 2022, 22, 6075. [Google Scholar] [CrossRef]
- Li, Y.; Du, X.; Wan, F.; Wang, X.; Yu, H. Rotating machinery fault diagnosis based on convolutional neural network and infrared thermal imaging. Chin. J. Aeronaut. 2020, 33, 427–438. [Google Scholar] [CrossRef]
- Li, X.; Cheng, J.; Shao, H.; Liu, K.; Cai, B. Fusion CWSMM-Based Framework for Rotating Machinery Fault Diagnosis Under Strong Interference and Imbalanced Case. IEEE Trans. Industr. Inform. 2022, 18, 5180–5189. [Google Scholar] [CrossRef]
- Resendiz-Ochoa, E.; Osornio-Rios, R.A.; Benitez-Rangel, J.P.; Romero-Troncoso, R.D.J.; Morales-Hernandez, L.A. Induction motor failure analysis: An automatic methodology based on infrared imaging. IEEE Access 2018, 6, 76993–77003. [Google Scholar] [CrossRef]
- Han, S.; Yang, F.; Jiang, H.; Yang, G.; Wang, D.; Zhang, N. Statistical Analysis of Infrared Thermogram for CNN-Based Electrical Equipment Identification Methods. Appl. Artif. Intell. 2022, 36, 2004348. [Google Scholar] [CrossRef]
- Balakrishnan, G.K.; Yaw, C.T.; Koh, S.P.; Abedin, T.; Raj, A.A.; Tiong, S.K.; Chen, C.P. A Review of Infrared Thermography for Condition-Based Monitoring in Electrical Energy: Applications and Recommendations. Energies 2022, 15, 6000. [Google Scholar] [CrossRef]
- Picazo-Rodenas, M.J.; Antonino-Daviu, J.; Climente-Alarcon, V.; Royo-Pastor, R.; Mota-Villar, A. Combination of noninvasive approaches for general assessment of induction motors. IEEE Trans. Ind. Appl. 2015, 51, 2172–2180. [Google Scholar] [CrossRef] [Green Version]
- Shorten, C.; Khoshgoftaar, T.M. A survey on image data augmentation for deep learning. J. Big Data 2019, 6, 60. [Google Scholar] [CrossRef] [Green Version]
- Valizadeh, M.; Wolff, S.J. Convolutional Neural Network Applications in Additive Manufacturing: A Review. Adv. Ind. Manuf. Eng. 2022, 4, 100072. [Google Scholar] [CrossRef]
- Li, Z.; Liu, F.; Yang, W.; Peng, S.; Zhou, J. A Survey of Convolutional Neural Networks: Analysis, Applications, and Prospects. IEEE Trans. Neural Netw. Learn Syst. 2022, 33, 6999–7019. [Google Scholar] [CrossRef] [PubMed]
- Singh, S.; Raj, P.; Namboodiri, V.P. EDS pooling layer. Image Vis. Comput. 2020, 98, 103923. [Google Scholar] [CrossRef]
- López-Pérez, D.; Antonino-Daviu, J. Application of Infrared Thermography to Failure Detection in Industrial Induction Motors: Case Stories. IEEE Trans. Ind. Appl. 2017, 53, 1901–1908. [Google Scholar] [CrossRef]
- Alhassan, A.M.; Zainon, W.M.N.W. Brain tumor classification in magnetic resonance image using hard swish-based RELU activation function-convolutional neural network. Neural Comput. Appl. 2021, 33, 9075–9087. [Google Scholar] [CrossRef]
- Osornio-Rios, R.A.; Jean-Cuellar, A.Y.; Alvarado-Hernandez, A.I.; Zamudio-Ramirez, I.; Cruz-Albarran, I.A.; Antonino-Daviu, J.A. Fault detection and classification in kinematic chain by means of PCA extraction-reduction of features from thermographic images. Measurement 2022, 197, 111340. [Google Scholar] [CrossRef]
- Khanjani, M.; Ezoji, M. Electrical fault detection in three-phase induction motor using deep network-based features of thermograms. Measurement 2021, 173, 108622. [Google Scholar] [CrossRef]
- Choudhary, A.; Goyal, D.; Sudha Letha, S. Infrared Thermography-Based Fault Diagnosis of Induction Motor Bearings Using Machine Learning. IEEE Sens. J. 2021, 21, 1727–1734. [Google Scholar] [CrossRef]
- Badoni, S.; Jarial, R.K. Health Monitoring of three phase induction motor using infrared thermography. In Proceedings of the 2021 6th International Conference on Communication and Electronics Systems (ICCES21), Coimbatre, India, 8–10 July 2021. [Google Scholar] [CrossRef]
- Mehta, A.; Goyal, D.; Choudhary, A.; Pabla, B.S.; Belghith, S. Machine Learning-Based Fault Diagnosis of Self-Aligning Bearing for Rotating Machinery Using Infrared Thermography. Math. Probl. Eng. 2021, 15, 9947300. [Google Scholar] [CrossRef]
- Zamudio-Ramirez, I.; Osornio-Rios, R.A.; Antonino-Daviu, J.A.; Razik, H.; Romero-Troncoso, R.J. Magnetic flux analysis for the condition monitoring of electric machines: A review. IEEE Trans. Ind. Inform. 2022, 18, 2895–2908. [Google Scholar] [CrossRef]
- Ibrahim, I.M.; Abdulazeez, A.M. The Role of Machine Learning Algorithms for Diagnosis Diseases. J. Appl. Sci. Technol. Trends 2021, 2, 10–19. [Google Scholar] [CrossRef]
- Novakovic, J.D.; Veljovic, A.; IIic, S.S.; Papic, Z.; Tomovic, M. Evaluation of Classification Models in Machine Learning. Theory Appl. Math. Comput. Sci. 2017, 7, 39–46. [Google Scholar]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Number of Filters | 8 | 16 | 24 | ||||||
|---|---|---|---|---|---|---|---|---|---|
| Filter size | 3 × 3 | 4 × 4 | 5 × 5 | 3 × 3 | 4 × 4 | 5 × 5 | 3 × 3 | 4 × 4 | 5 × 5 |
| Average accuracy | 99.58% | 98.25% | 99.05% | 98.96% | 97.79% | 95.73% | 99.21% | 97.98% | 97.73% |
| Test | Accuracy | Precision | Recall | F1-Score |
|---|---|---|---|---|
| 1 | 95.00% | 97.73% | 97.50% | 97.49% |
| 2 | 98.80% | 98.80% | 98.75% | 98.74% |
| 3 | 98.75% | 98.80% | 98.75% | 98.74% |
| 4 | 98.75% | 98.80% | 98.75% | 98.74% |
| 5 | 99.40% | 99.40% | 99.38% | 99.38% |
| 6 | 99.60% | 99.60% | 99.58% | 99.58% |
| Test | Accuracy | Precision | Recall | F1-Score |
|---|---|---|---|---|
| 1 | 97.50% | 97.73% | 97.50% | 97.49% |
| 2 | 98.10% | 98.15% | 98.13% | 98.12% |
| 3 | 98.10% | 98.15% | 98.13% | 98.12% |
| 4 | 98.80% | 98.80% | 98.75% | 98.75% |
| 5 | 98.80% | 98.78% | 98.75% | 98.75% |
| 6 | 99.50% | 99.50% | 99.48% | 99.48% |
| Work | Method | Detected Faults | Accuracy |
|---|---|---|---|
| [48] |
| Broken rotor bars. Rolling bearing. Misalignment. | 96% |
| [49] |
| Stator winding short-circuit faults | 100% |
| [50] |
| Bearings | 97.2% |
| [51] |
| Wire isolation | 93.8% |
| [52] |
| Self-Aligning Bearings | 100% |
| Proposed work |
| Broken rotor bar, bearing, and misalignment. | <95% |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Trejo-Chavez, O.; Cruz-Albarran, I.A.; Resendiz-Ochoa, E.; Salinas-Aguilar, A.; Morales-Hernandez, L.A.; Basurto-Hurtado, J.A.; Perez-Ramirez, C.A. A CNN-Based Methodology for Identifying Mechanical Faults in Induction Motors Using Thermography. Machines 2023, 11, 752. https://doi.org/10.3390/machines11070752
Trejo-Chavez O, Cruz-Albarran IA, Resendiz-Ochoa E, Salinas-Aguilar A, Morales-Hernandez LA, Basurto-Hurtado JA, Perez-Ramirez CA. A CNN-Based Methodology for Identifying Mechanical Faults in Induction Motors Using Thermography. Machines. 2023; 11(7):752. https://doi.org/10.3390/machines11070752
Chicago/Turabian StyleTrejo-Chavez, Omar, Irving A. Cruz-Albarran, Emmanuel Resendiz-Ochoa, Alejandro Salinas-Aguilar, Luis A. Morales-Hernandez, Jesus A. Basurto-Hurtado, and Carlos A. Perez-Ramirez. 2023. "A CNN-Based Methodology for Identifying Mechanical Faults in Induction Motors Using Thermography" Machines 11, no. 7: 752. https://doi.org/10.3390/machines11070752
APA StyleTrejo-Chavez, O., Cruz-Albarran, I. A., Resendiz-Ochoa, E., Salinas-Aguilar, A., Morales-Hernandez, L. A., Basurto-Hurtado, J. A., & Perez-Ramirez, C. A. (2023). A CNN-Based Methodology for Identifying Mechanical Faults in Induction Motors Using Thermography. Machines, 11(7), 752. https://doi.org/10.3390/machines11070752