3.1. Second-Order ADRC Control Principle
The PID control structure is frequently utilized for the BLDC speed loop control procedure. Equation (9) presents the structure
In the PID controller, the proportional link effectively regulates the BLDC’s response speed. However, increasing kp can lead to overshooting. It is crucial to find an optimal balance between kp and Ki to achieve optimal performance. The integral link can eliminate steady-state error in the system, and increasing ki can accelerate the error reduction. However, an excessively large ki can cause integral saturation. When connected to a system error, the differential link suppresses overshooting. Increasing kd prolongs the system regulation time, thereby weakening the disturbance resistance of the system. However, the PID controller struggles to harmonize with fast or overshooting dynamics, resulting in diminished disturbance resistance.
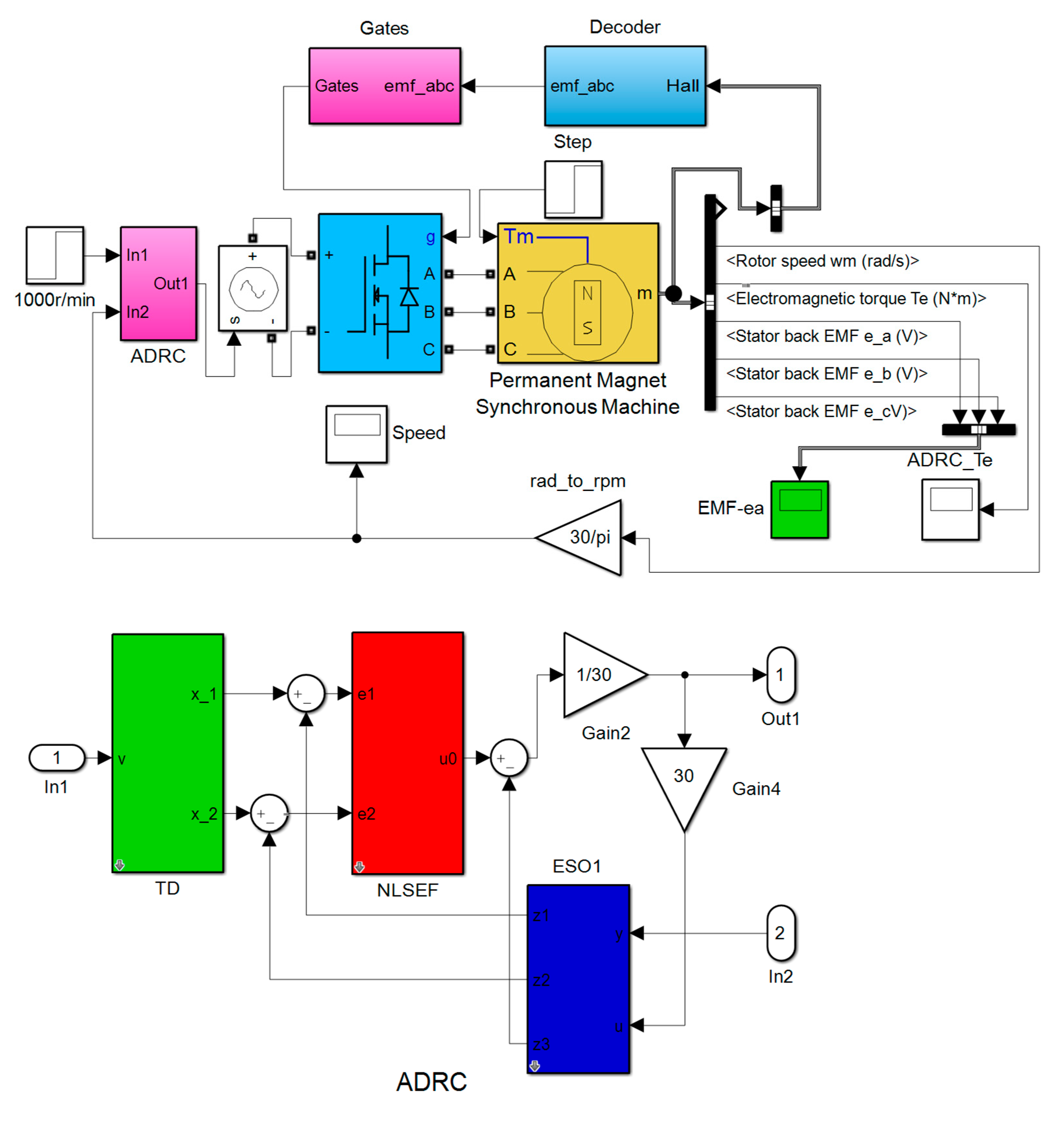
The ADRC is a high-performance nonlinear control technique that evolved from PID and modern control theory. The ADRC does not require precise mathematical models of controlled objects. Instead, it assesses and corrects total disturbances by evaluating the combined effect of the “uncertain model part” and “unknown disturbances” as the total disturbance. The ADRC controller comprises a tracking differential (TD), an extended state observer (ESO), and nonlinear state error feedback (NLSEF), in addition to a new controller. NLSELF can observe and compensate for the system’s uncertain model parts and unknown perturbations. Compared to the PID controller, the ADRC is more adept at meeting the control requirements of nonlinear complex systems, achieving rapid and overshoot-free responses in accordance with the target signal and exhibiting robust load disturbance resistance.
The primary function of the tracking differentiator is to manage the transition process, enabling fast and overshoot-free tracking of the target signal. TD effectively addresses the challenge of extracting continuous and differential signals from a discontinuous rotational speed signal replete with random noise.
The expanded state observer, a core component of ADRC, addresses the central issue of perturbation observation in active disturbance techniques. The ESO expands the perturbation action in the system into a new state variable and establishes a state observer capable of monitoring this expanded state. By utilizing a feedback mechanism, the ESO observes system perturbations and compensates for them at the control rate, thereby enhancing the system’s anti-disturbance capability. Importantly, expanded state observers do not rely on a specific model and do not require direct measurements to observe perturbations and obtain estimates.
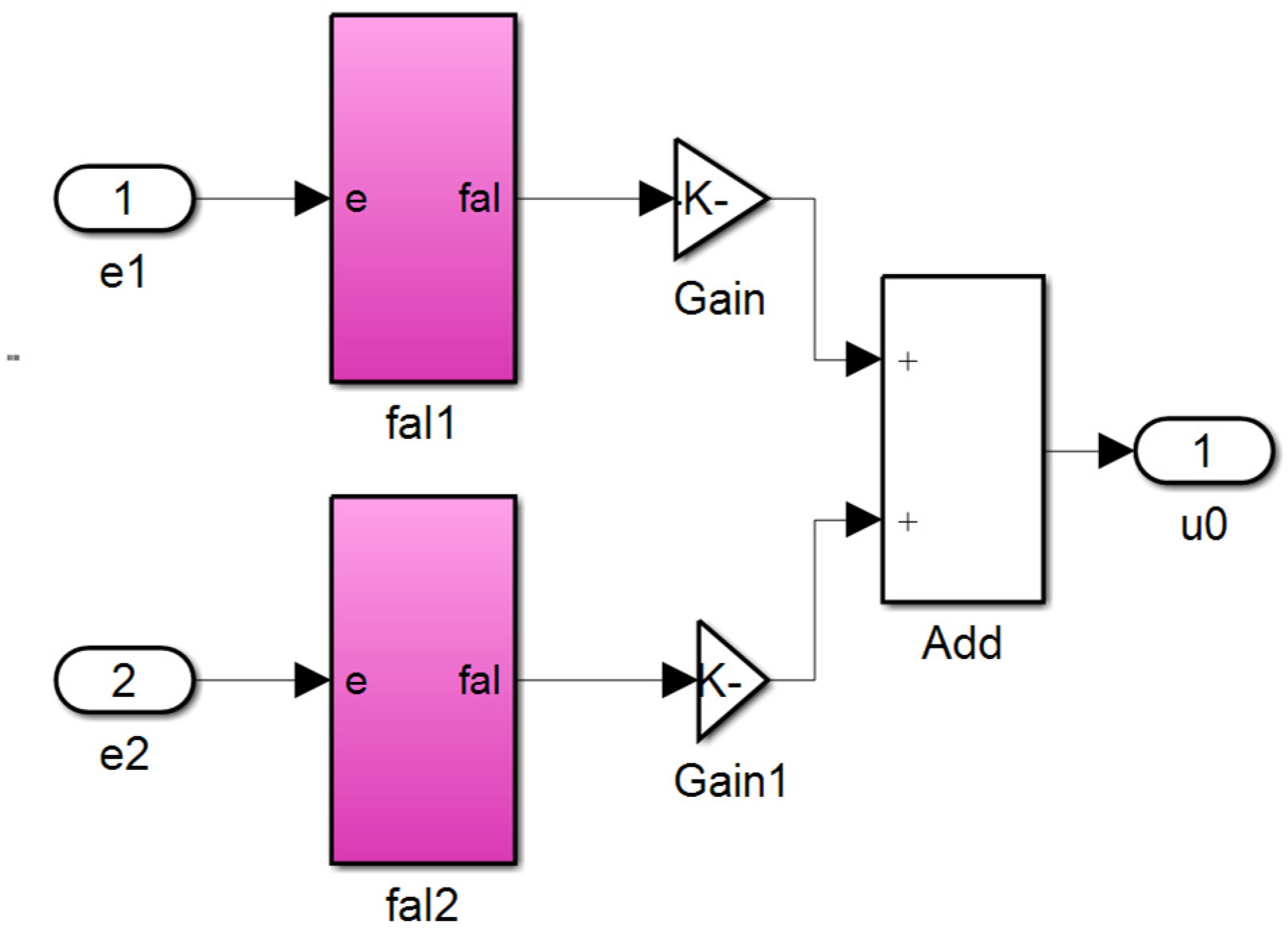
The nonlinear state error feedback permits the combination of three signals—the error signal of the transition process, the integral signal of the error, and the differential of the error signal—either linearly or nonlinearly. By utilizing the nonlinear fal(·) function, NLSEF achieves the control effect of “small error, large gain; large error, small gain”, thereby enhancing the robustness and adaptability of the system.
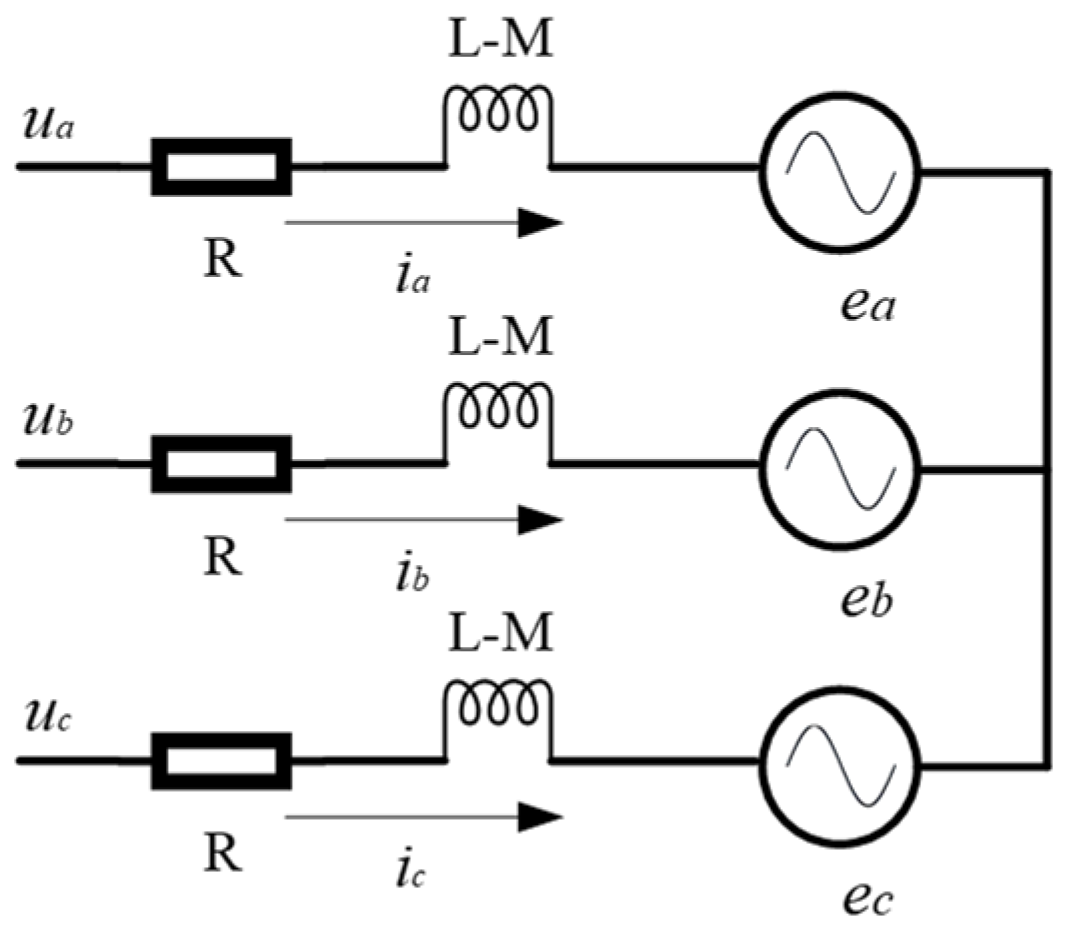
The differential equation for an uncertain object subject to an unknown perturbation is expressed as follows:
where
f(
x,
x1,
~,
x(n−1),
t) is the unknown function,
d(
t) is the unknown perturbation,
y is the system output, and
u(
t) is the system control quantity.
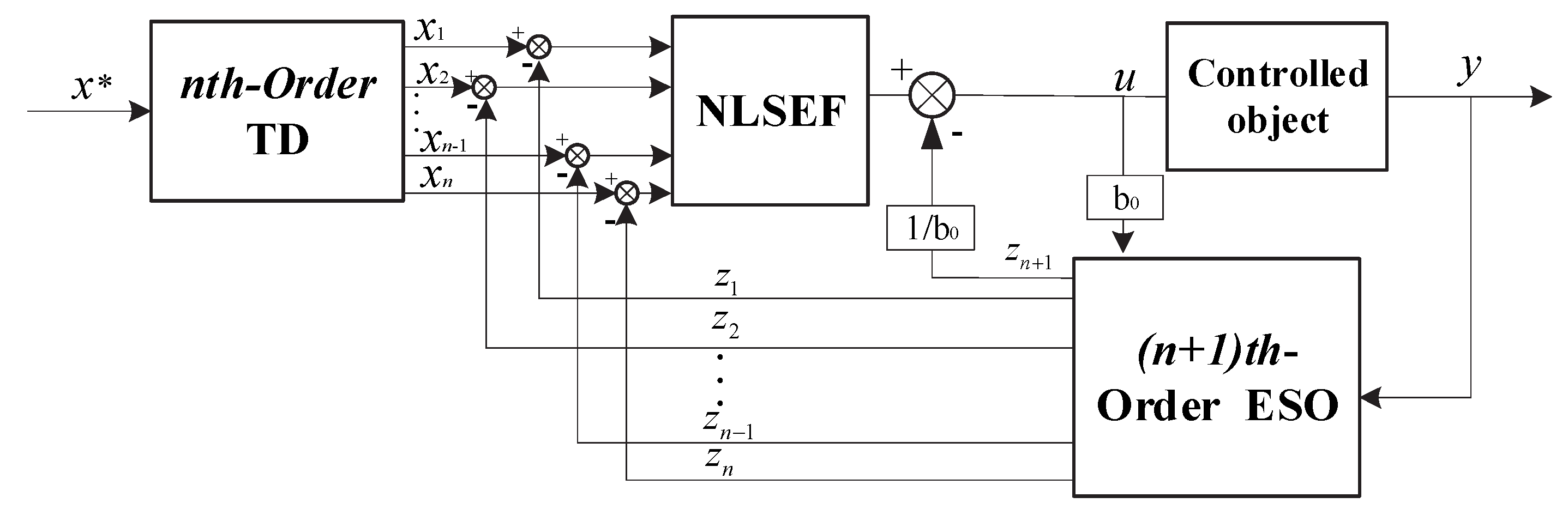
A schematic block diagram of the ADRC structure is shown in
Figure 2.
x* represents the input signal.
In practical applications, first-order ADRC and second-order ADRC are commonly utilized. Third- and higher-order ADRC expressions, which are complex and computationally intensive, necessitate higher controller performance and are less frequently employed. A typical differentiator replaces differentiation with differential approximation, as expressed:
When v(t) is contaminated by a noise signal, the use of differential computation amplifies the noise signal and may even overwhelm the differential signal. h is the sampling period. To address this issue, Jingqing Han proposed tracking the input signal using TD and obtaining the differential signal by solving the differential equations and using the integration result.
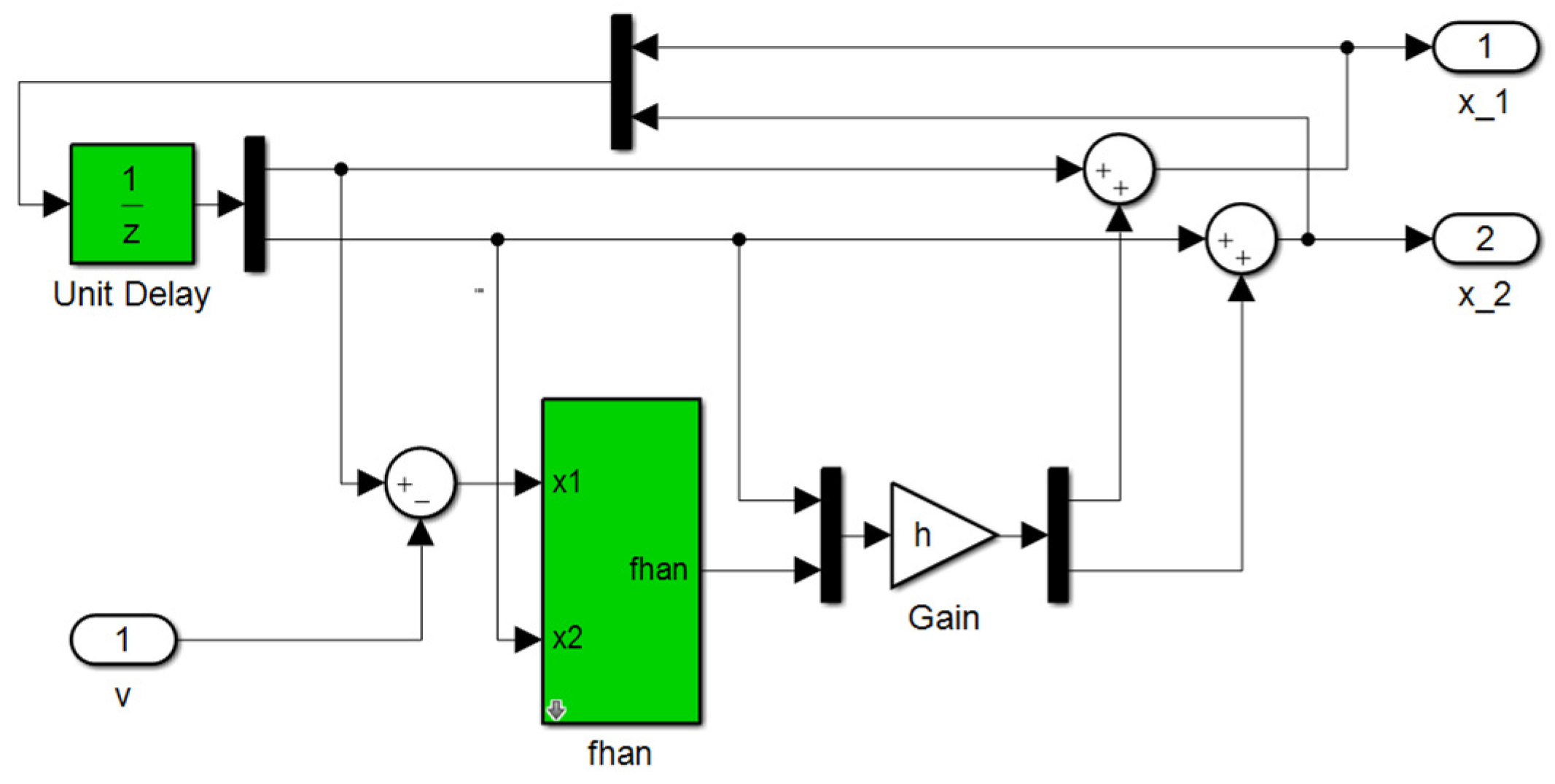
TD can smoothly track input signals, especially when the input signal contains noise or discontinuity. The tracking differentiator can convert these signals into continuous and smooth signals, thus avoiding the problems that may arise from direct step changes. Second, tracking differentiators can extract the differentiation of signals, which is crucial for control systems that need to understand the rate of signal change. In addition, it can also be used to arrange the transition process so that the output signal can smoothly transition from the current state to the target state, avoiding the impact and instability caused by direct step changes.
This approach is represented by TD as follows:
fhan(·) is the core component of TD, and its main function is to act as a buffer.
fhan(·) can help the system achieve fast and stable tracking of target signals while avoiding overshooting and improving control performance.
fhan(·) is the fastest integrating function, which is written as
TD ensures that x1 converges to the input signal xin, x2 is the differential signal x1, r is the speed factor, which determines the tracking speed, T is the integration step size, and h1 is the filter factor. In this case, a larger h1 reflects a more obvious filter effect.
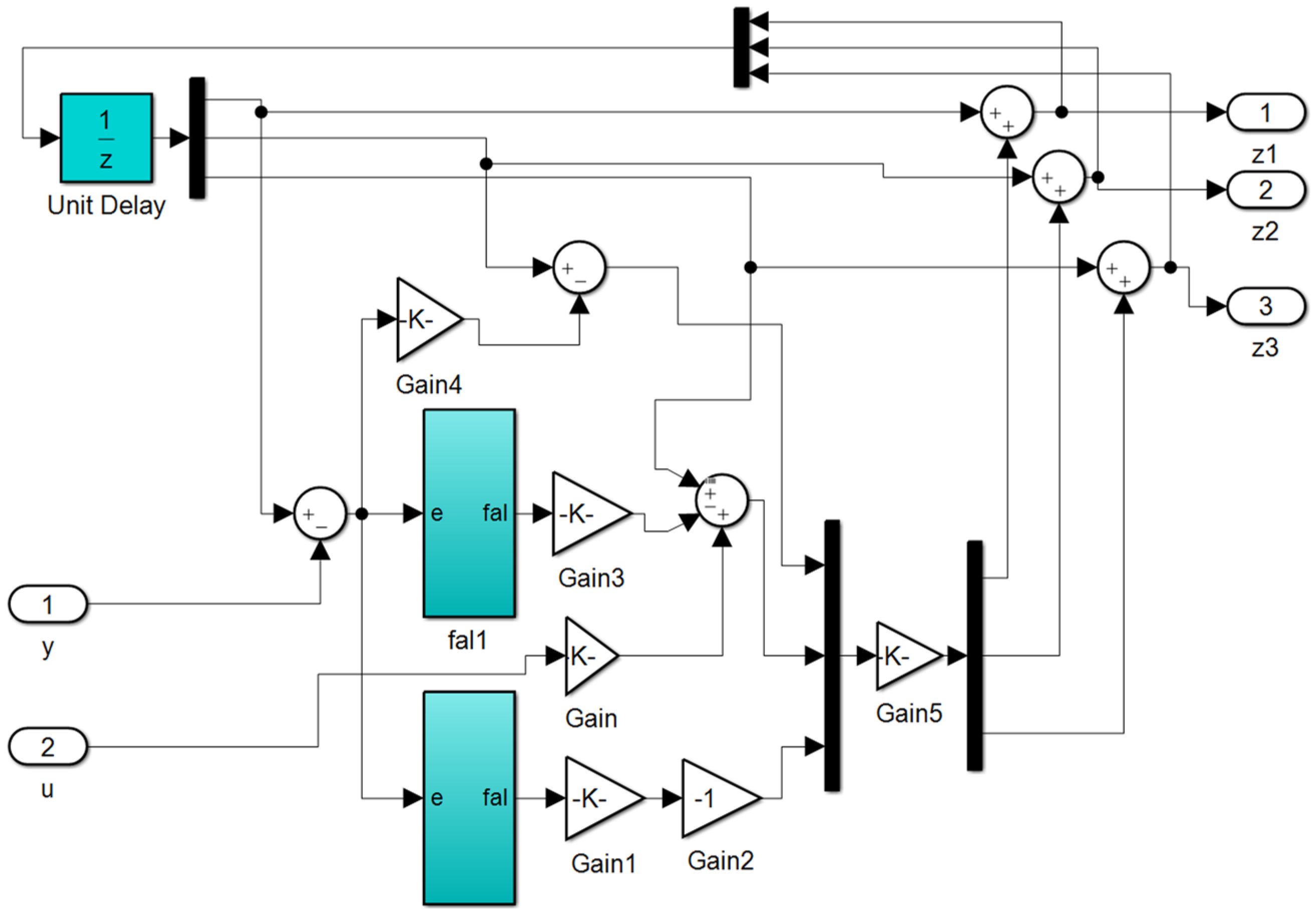
The primary role of the ESO is to monitor internal and external perturbations affecting the system’s output. The main concept of ESO involves expanding the total perturbation of the system into a new state variable higher than the first-order controlled object and then reconstructing the system’s original state variables and perturbations using inputs and outputs. For a second-order control object with a state equation
w(
t) is the external perturbation and
f(
x1,
x2,
w(
t),
t) represents the sum of the internal and external perturbations, or the “total perturbation”. As a new unknown state variable,
x3(
t) =
f(
x1,
x2,
w(
t),
t) expands a new state on the basis of Equation (14), and the original second-order state equation is expressed as follows:
The construction of a nonlinear state observer for Equation (15) has
β01,
β02, and
β03 are the output error correction gains. The
β01,
β02, and
β03 values are related to the sampling period. where
fal(·) is a nonlinear function written as
where
δ is an adjustable parameter, typically set to the same value as
h.
α01 and
α02 generally take values of 0.5 and 0.25, respectively. The nonlinear ESO can be transformed into a linear ESO (LESO) by substituting
fal() with
e.
TD generates the error signal
e1 and the differential signal of the error
e2, and NLSEF replaces linear feedback in PID with non-smooth feedback of the error. NLSEF implements the digital adaptation of “small gain with large error, large gain with small error” through the
fal(·) function. Variable gain PID, fuzzy control, and intelligent control all utilize this “small error, large gain; large error, small gain” control philosophy for regulation. The expression of the second-order NLSEF is shown in Equation (18).
where 0 <
α1 < 1 <
α2,
u0(
k) becomes the PD output when
fal(
e1,
α1,
δ) =
e1 and
fal(
e1,
α1,
δ) =
e2.
u(
k) denotes the output of the system.
β1 and
β2 are the error gain and differential gain, respectively.
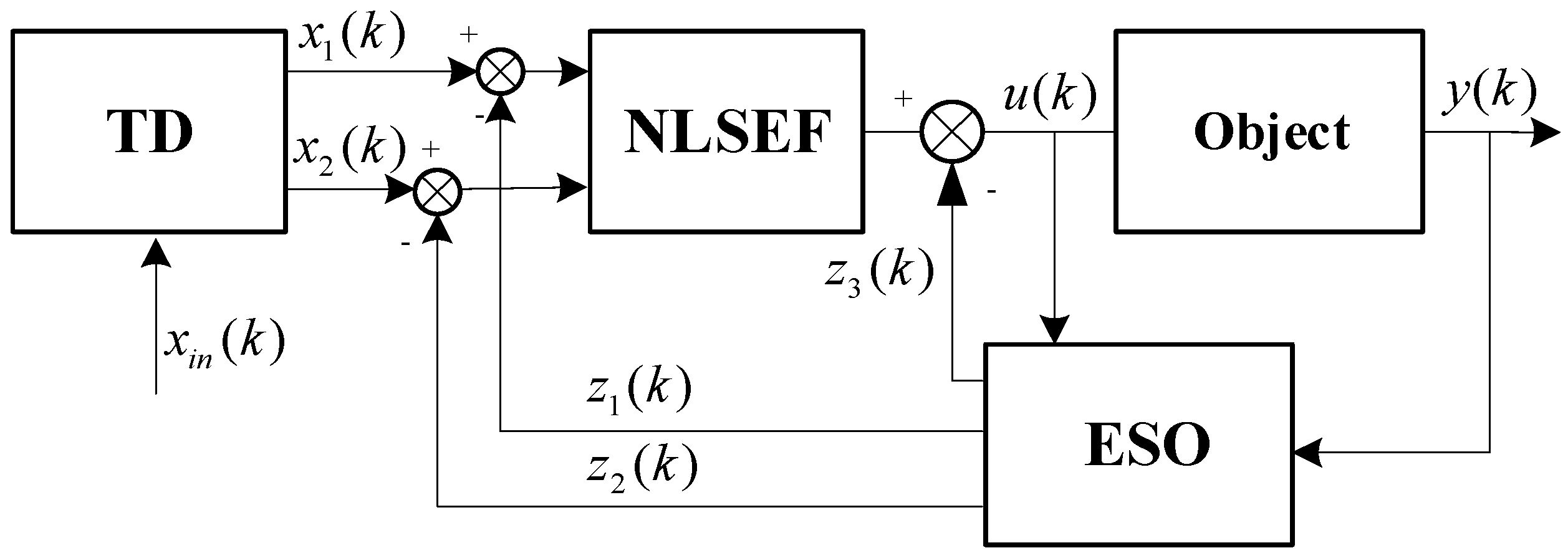
A block diagram of the control structure of the second-order ADRC is depicted in
Figure 3.






























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}