
A Novel Double Closed Loop Control of Temperature and Rotational Speed for Integrated Multi-Parameter Hydro-Viscous Speed Control System (HSCS)
 ,
,
Abstract
:1. Introduction
- The traditional PID control method commonly used in the HSCS cannot change the PID control parameters according to the working conditions and adjust the system according to the influence factors such as engine rotational speed fluctuation and lubricating oil temperature change. Moreover, rotational speed fluctuations of the engine and lubricating oil temperature are polytropic and lack variation. Therefore, it is difficult to manually develop control parameters to adjust.
- Although the existing fuzzy control and other methods can compensate for the influence of rotational speed fluctuation, pressure, and other factors, the influence of lubricating oil temperature in the HSCS is very complicated. There is no way to carry out traditional mathematical modeling, and it is impossible to adjust the input rotational speed according to the change in oil temperature, which will lead to the continuous rise of oil temperature and affect the working performance of the system.
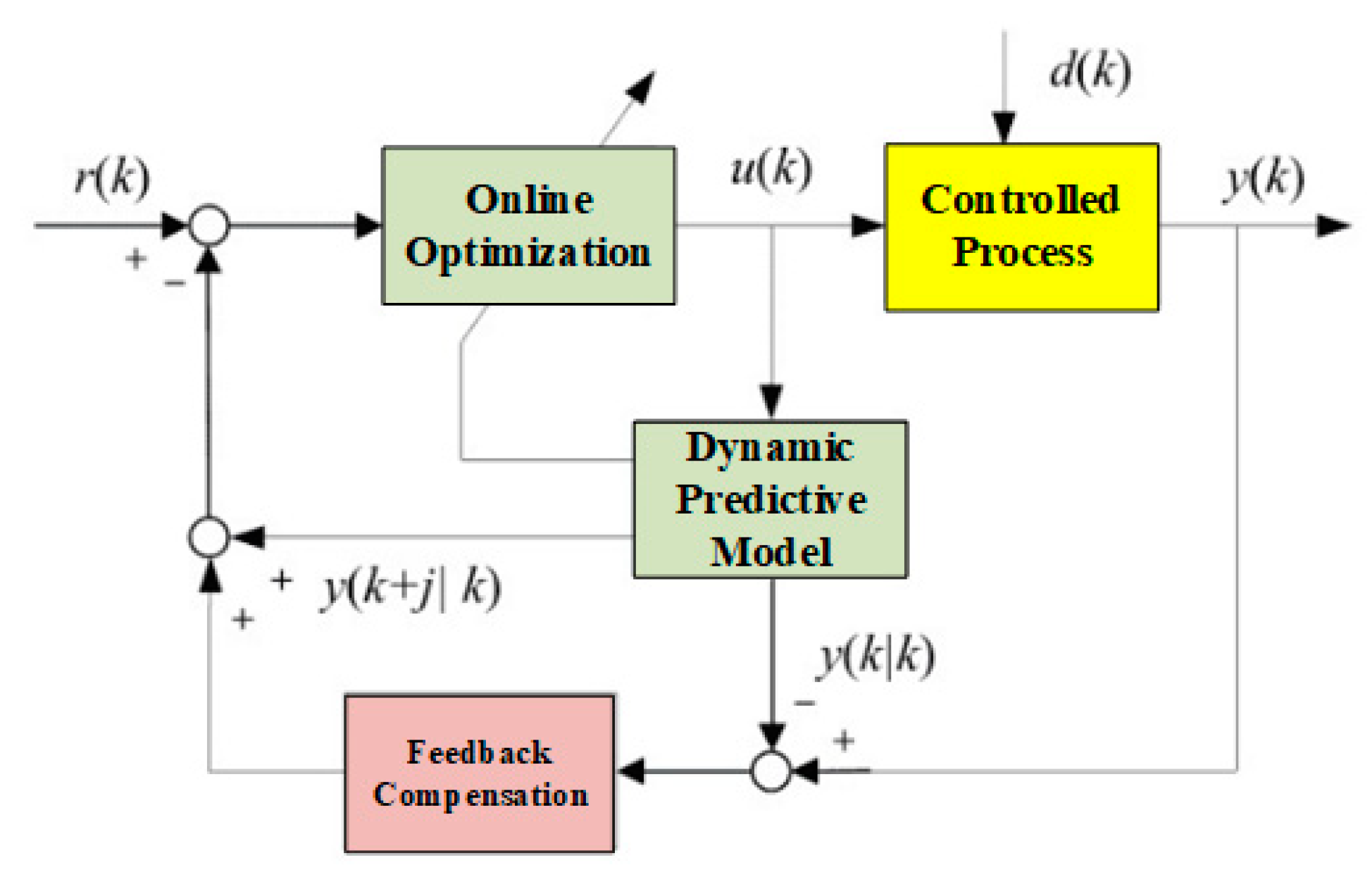
- Aiming at the influence of lubricating oil temperature on the system, considering that the HSCS has the characteristics of nonlinearity, time-varying, strong coupling, and uncertainty, it is difficult to obtain an accurate mathematical model. The temperature closed loop based on model predictive control (MPC) is introduced to control the rotational speed. By compensating for the influence of oil temperature change on the HSCS, the system control accuracy is improved.
- Aiming at the influence of the input rotational speed on the system, the closed loop control structure based on the revolution speed is used, and the output of the equal ratio inverse model built by the neural network is used as the feedforward compensation. The adaptive algorithm is used to adjust the PID control parameters to realize the output rotational speed of the hydro-viscous to follow the desired rotational speed change, and the nonlinear large hysteresis characteristics of HSCS are transformed into an approximate linear relationship, thereby improving the domain of HSCS.
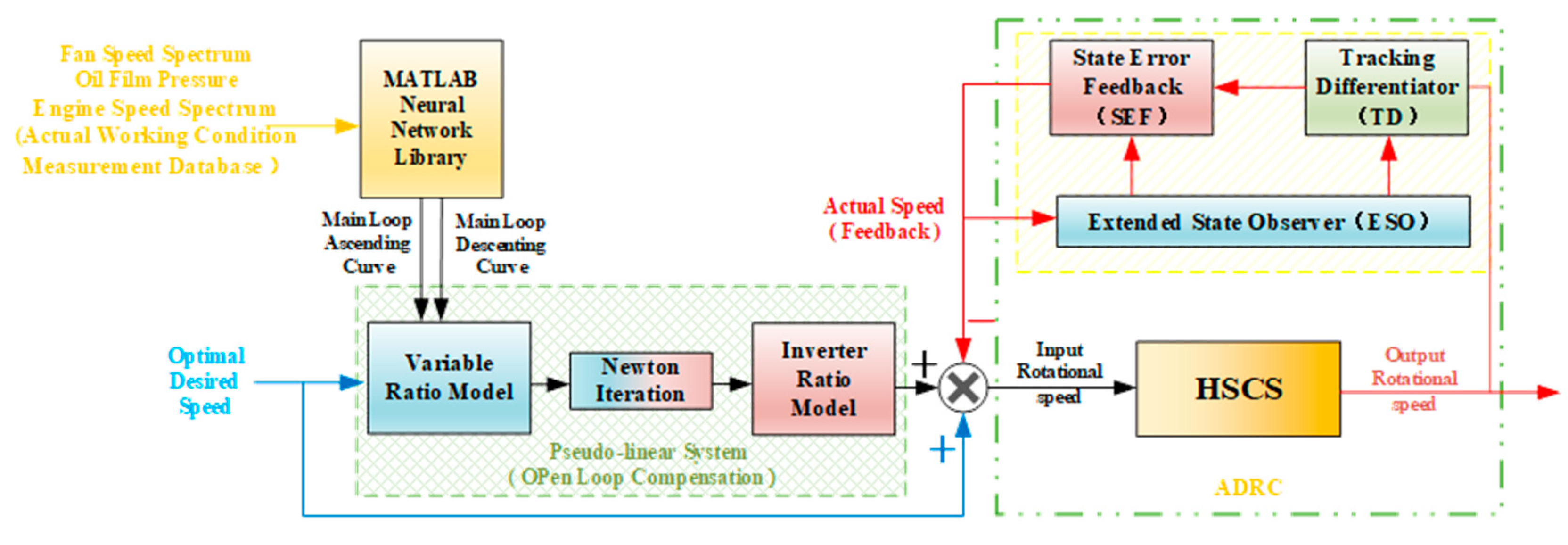
2. Overall Control Strategy Flow Chart of HSCS
3. Establishment of HSCS Data Model
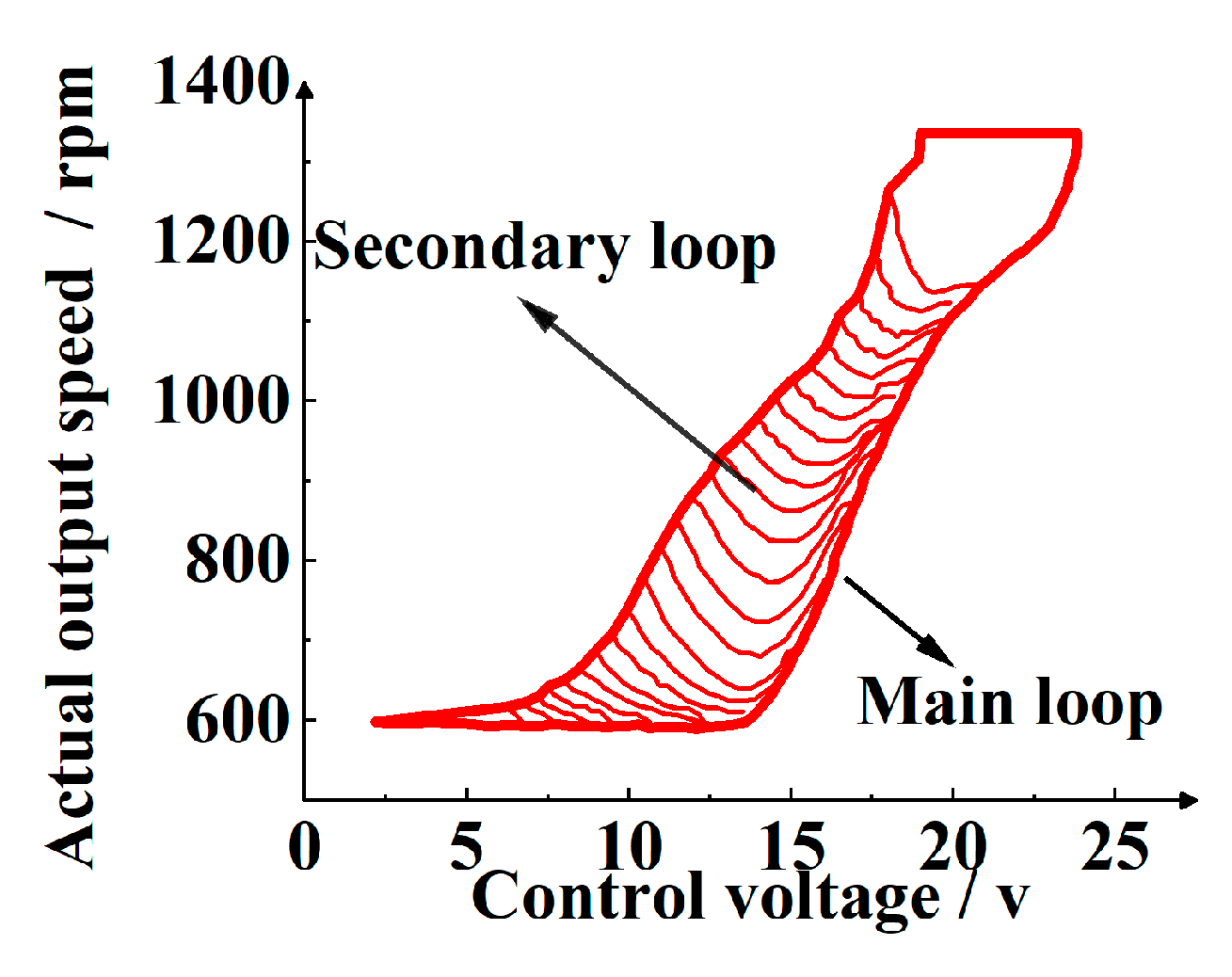
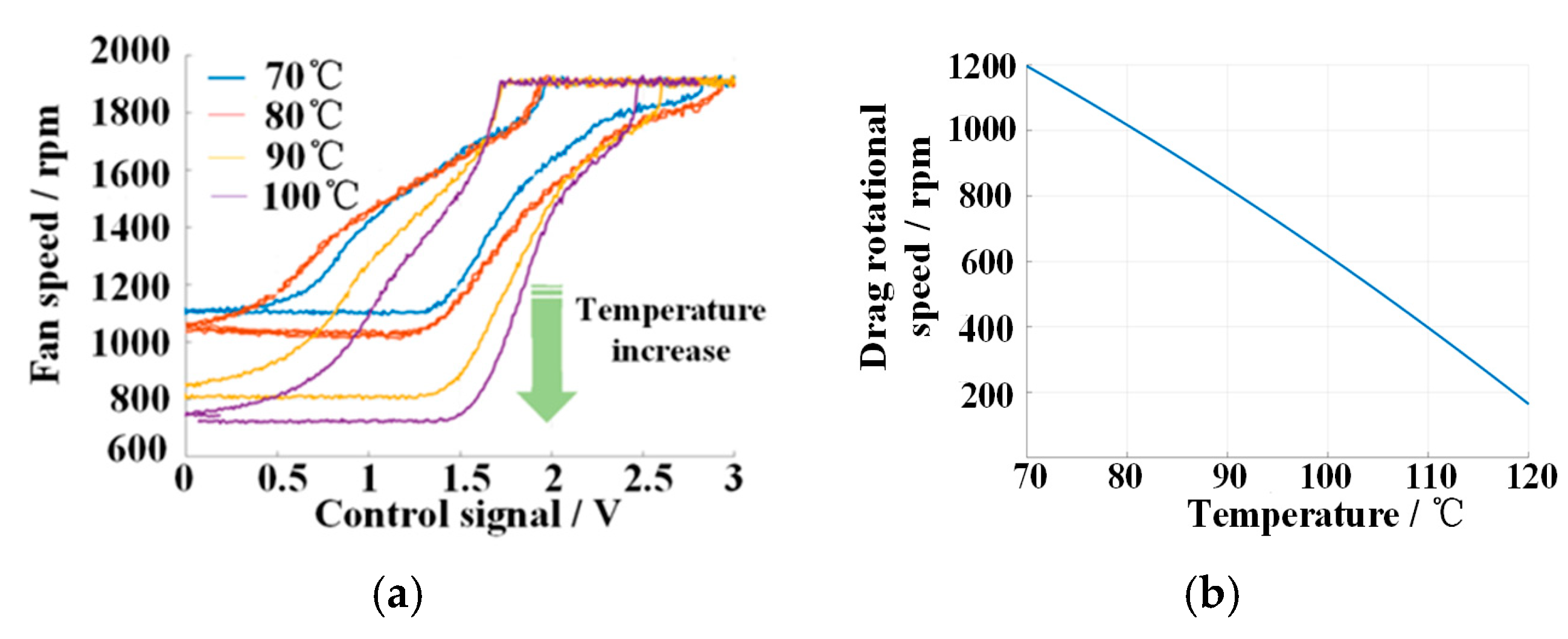
3.1. Hydro-Viscous Speed Disturbance Factor Analysis
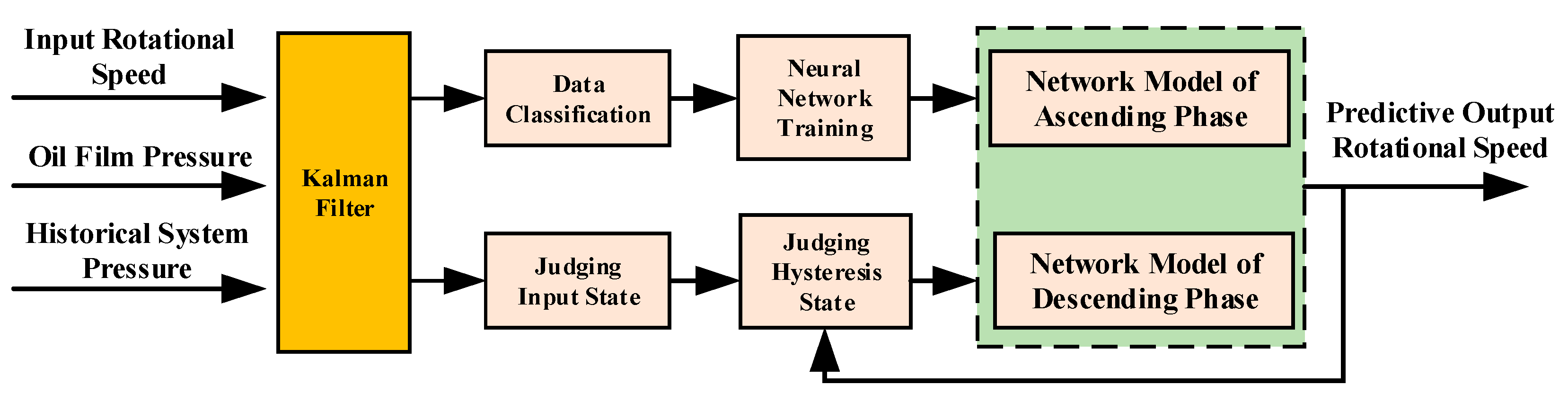
3.2. Main Loop Model Structure
- (1)
- Data filter: The Kalman filter algorithm is used to eliminate the abnormal disturbance of input control pressure and maintain the stable output of the model.
- (2)
- Data classification: The simulating data are divided into ascending and descending phases of pressure to distinguish control intervals.
- (3)
- Establish a neural network model: A back propagation neural network is selected, appropriate parameters are set to train the model in the ascending and descending phases, and model training and model verification are performed.
3.3. Prediction Secondary Loop Model
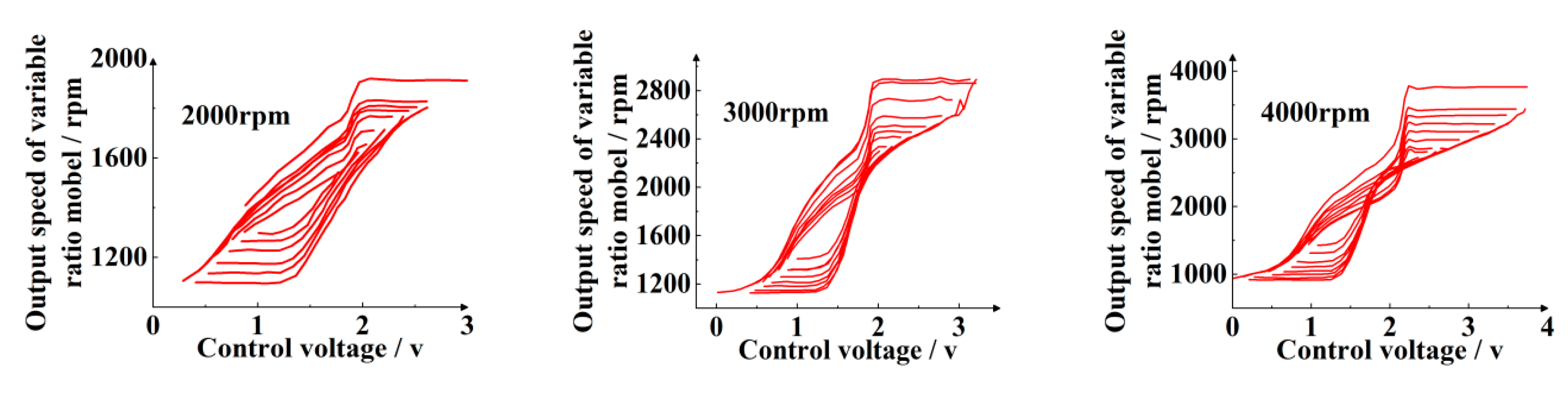
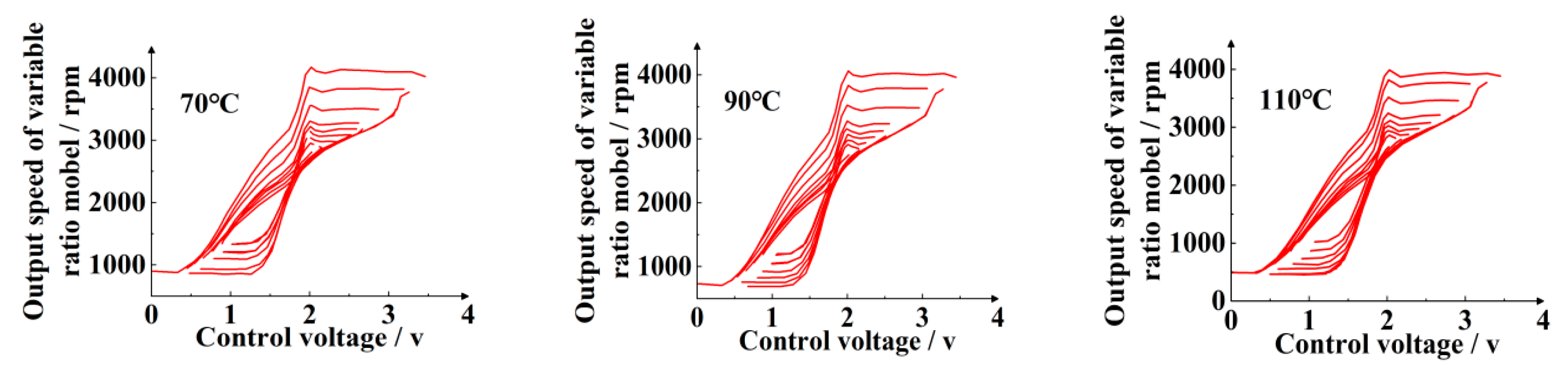
3.4. Generalization Capability Verification of Data Model
4. Double Closed Loop Control of Temperature and Rotational Speed for HSCS
4.1. Closed Loop Control Method of Temperature
4.1.1. Basic Principle of Control
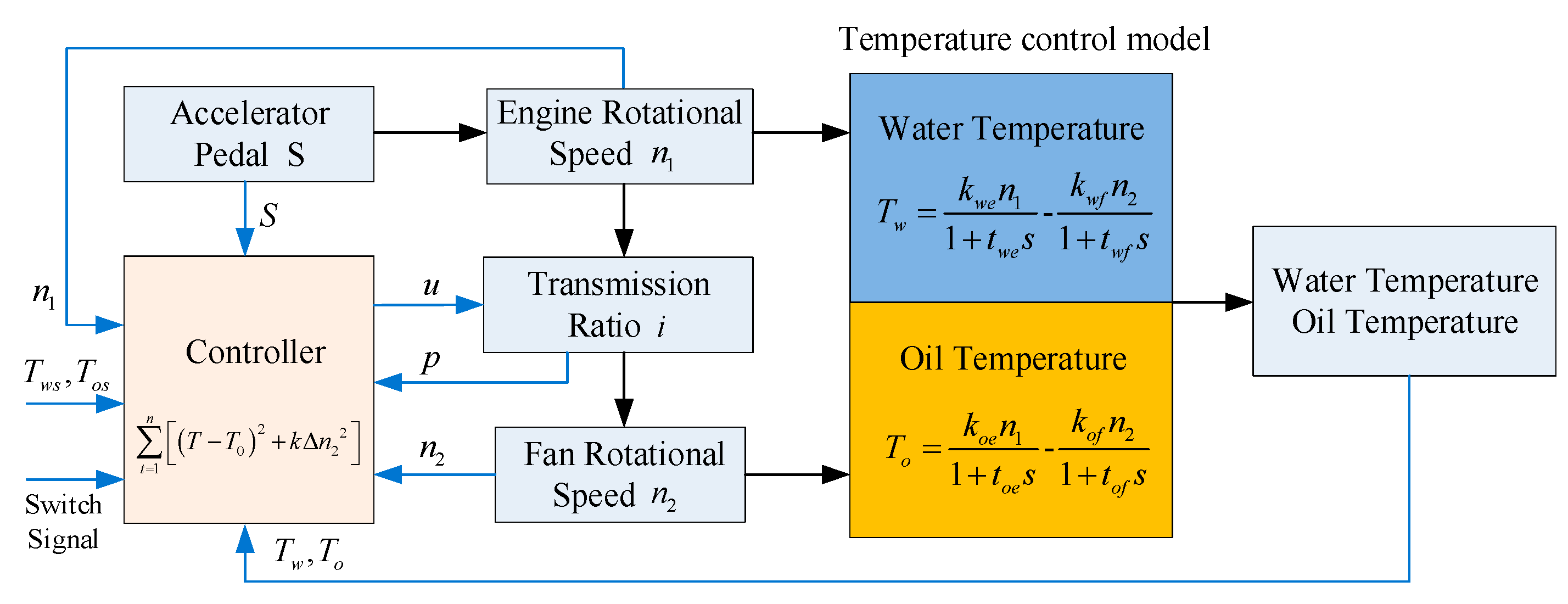
4.1.2. Integrated Treatment of Temperature of Oil and Water
4.1.3. Temperature Control Model
4.1.4. MPC
4.2. Closed Loop Control Method of Rotational Speed
4.2.1. Basic Principle of Control
4.2.2. Inverter Ratio Model of Feedforward Compensation
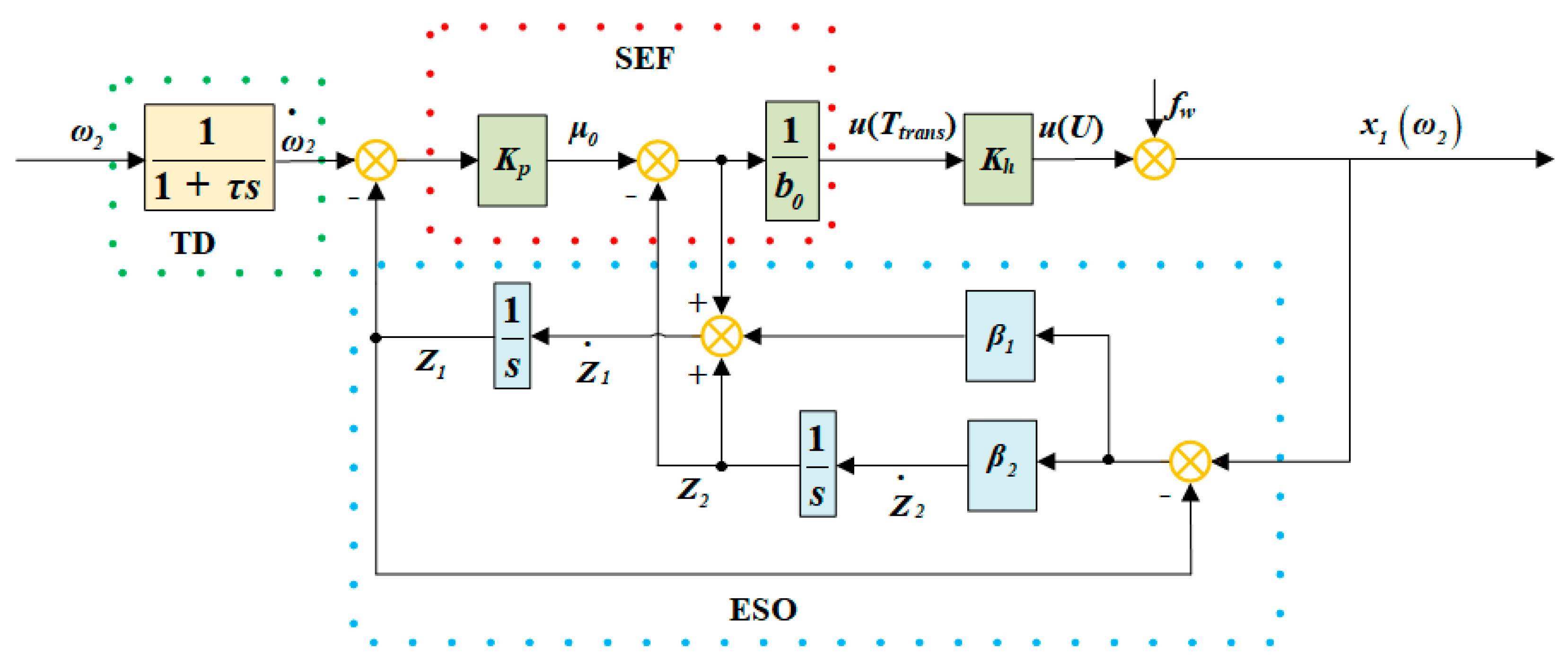
4.2.3. Feedback Control of ADRC
5. Simulation and Experiments
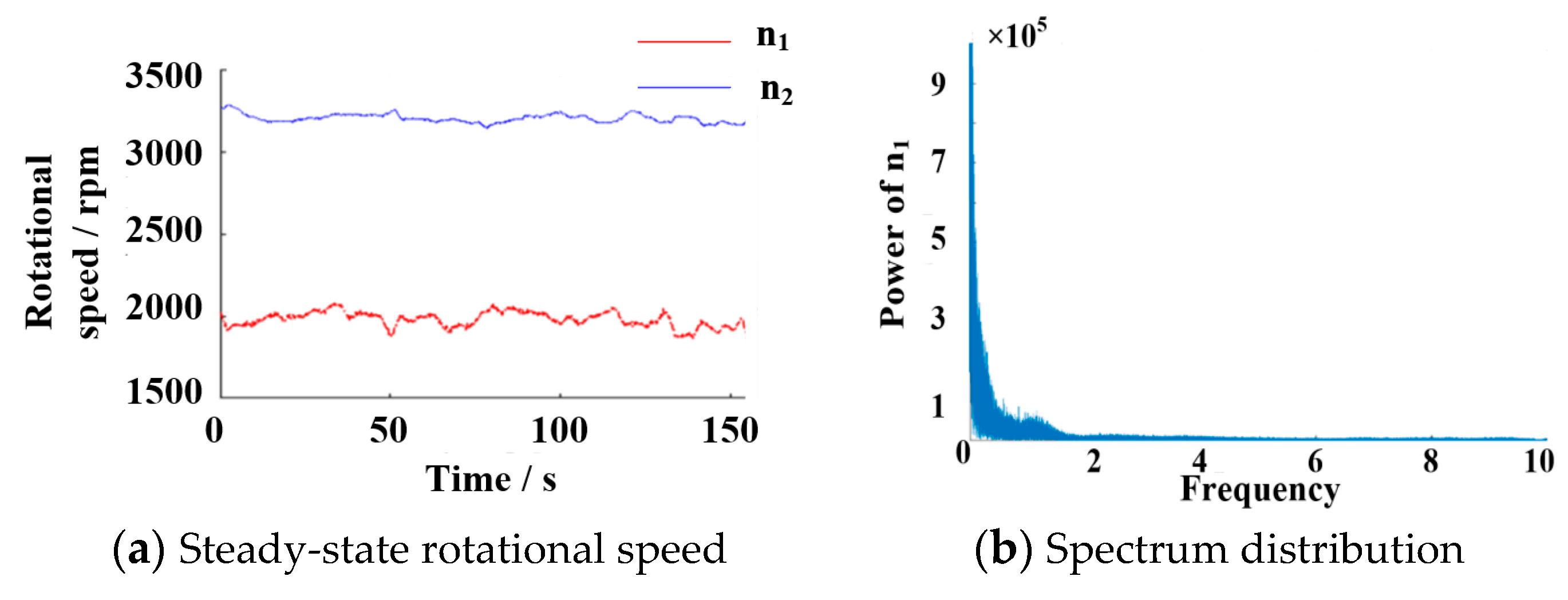
5.1. Steady-State Experiment Verification
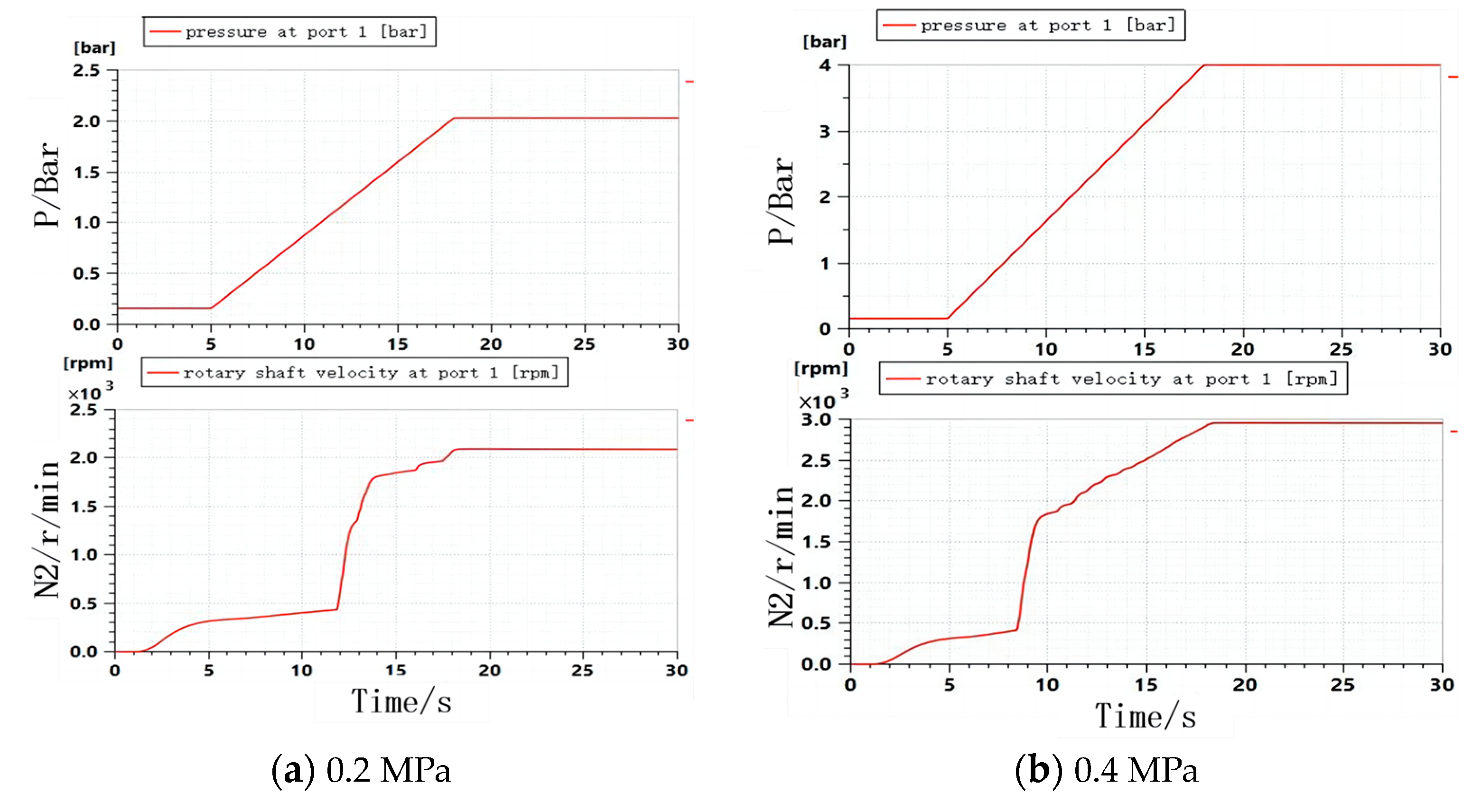
5.1.1. Experiment Scheme
5.1.2. Experiment Results and Analysis
- (1)
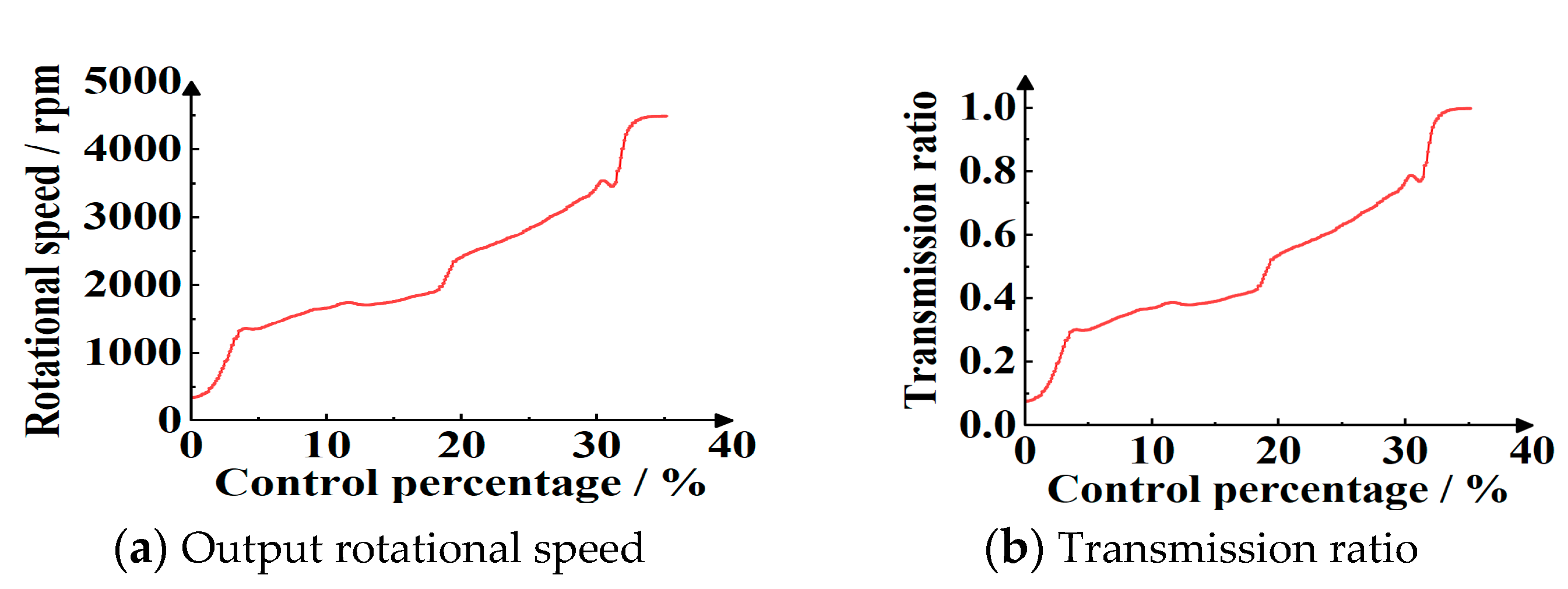
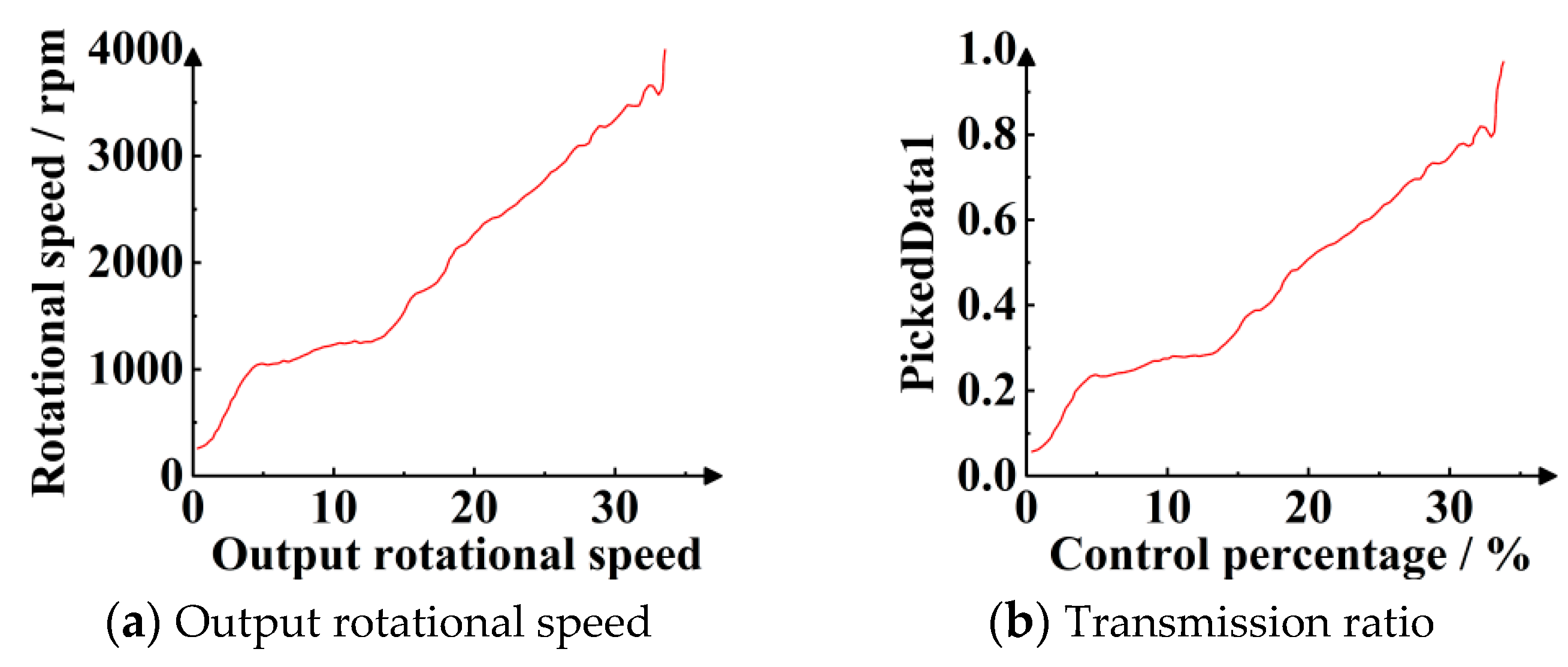
- Equal ratio model inverse compensation control as a feedforward open loop control link can significantly reduce the open loop speed curve in the ascending and descending phases of the dead zone range and improve the sensitivity of the adjustment process while reducing hysteresis and nonlinearity also has a good effect.
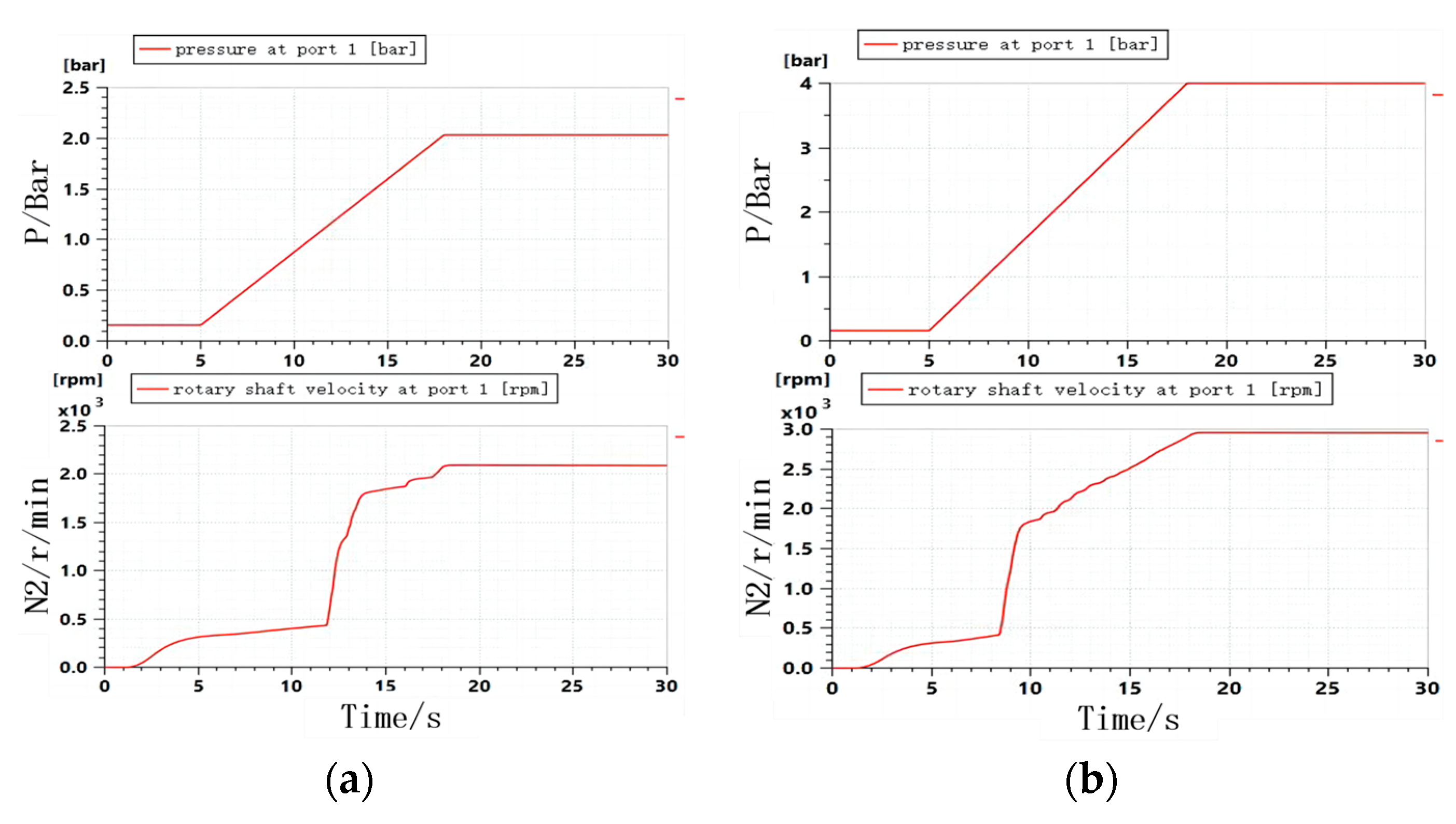
- (2)
- The adaptive closed loop control is superimposed on the open loop feedforward control, which can further reduce the control hysteresis and nonlinearity, and can significantly improve the ability of disturbance rejection and adaptability of the model parameters change caused by oil temperature, input rotational speed, and other factors.
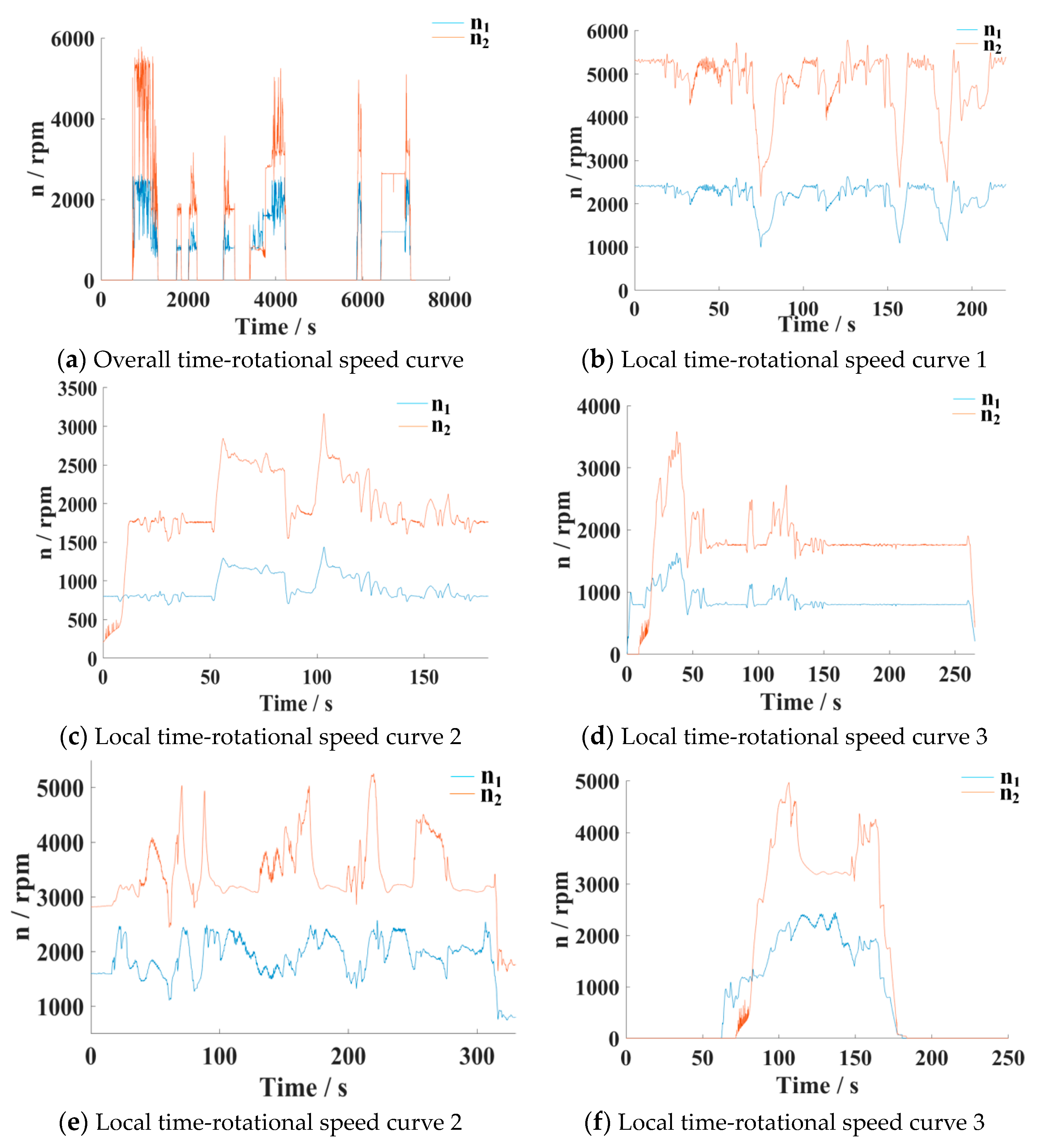
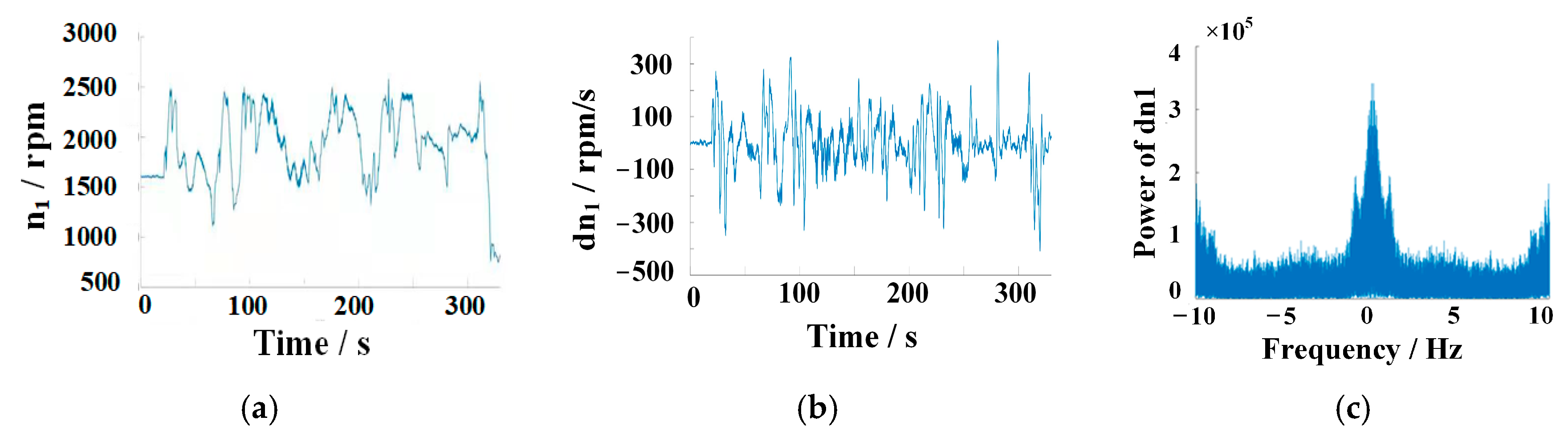
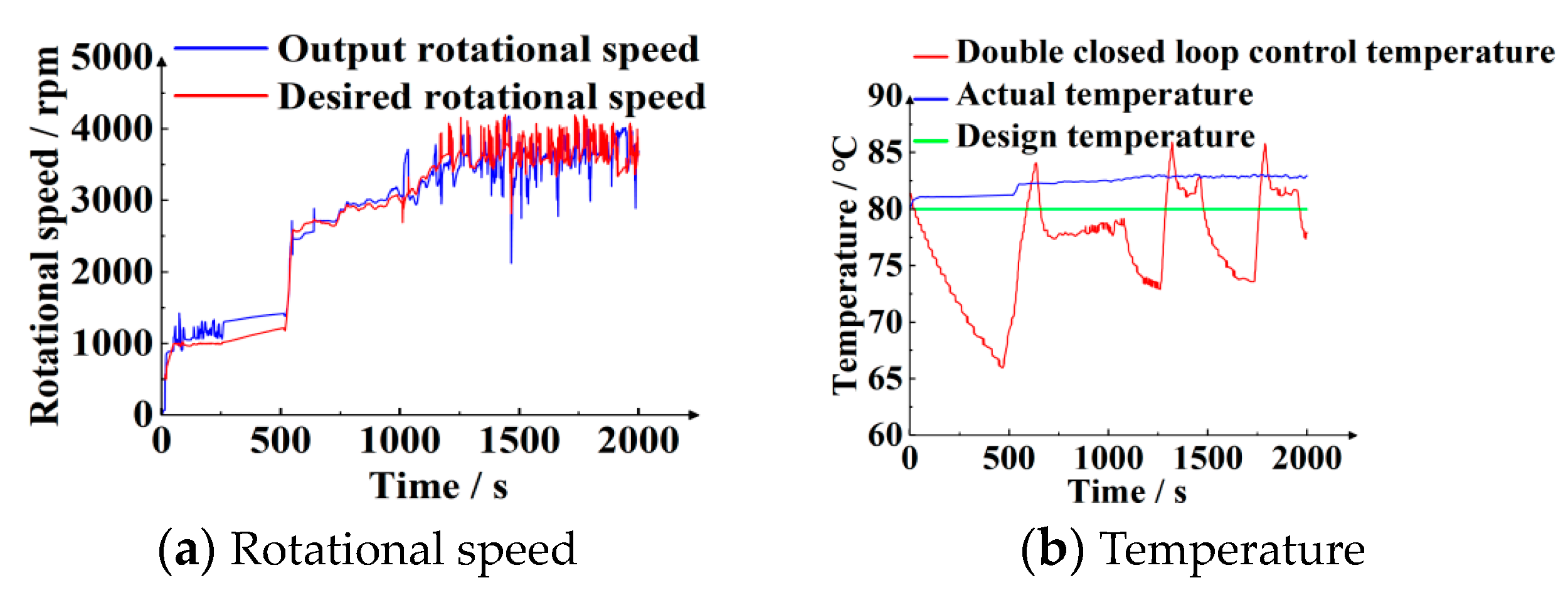
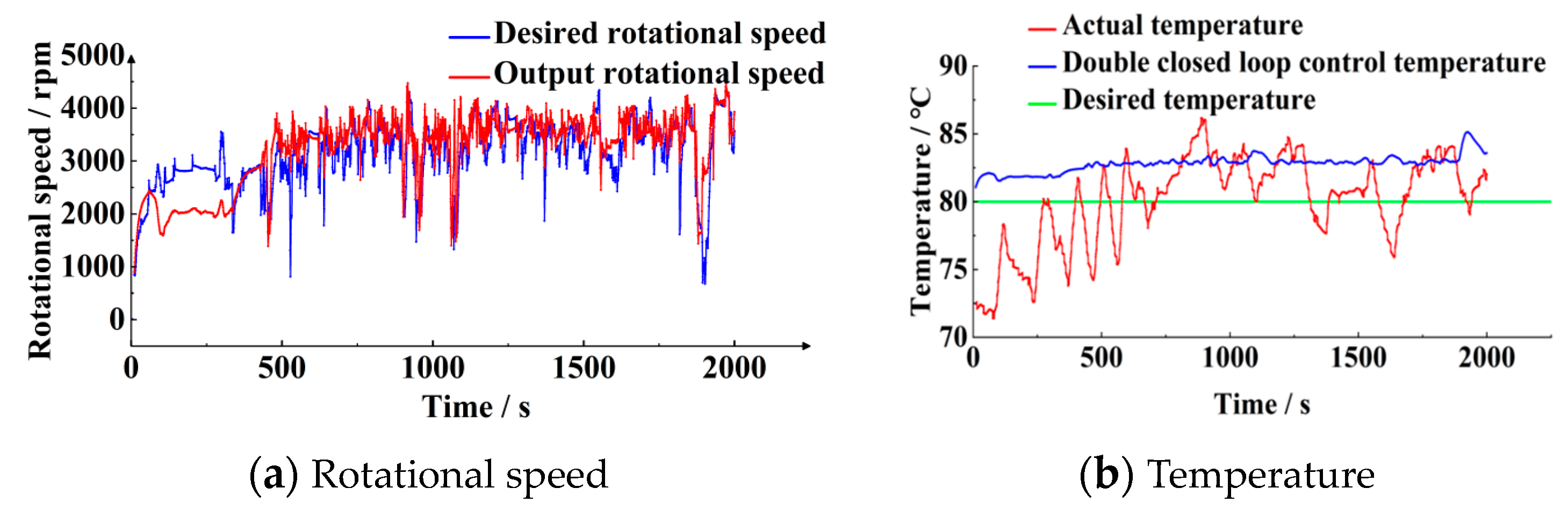
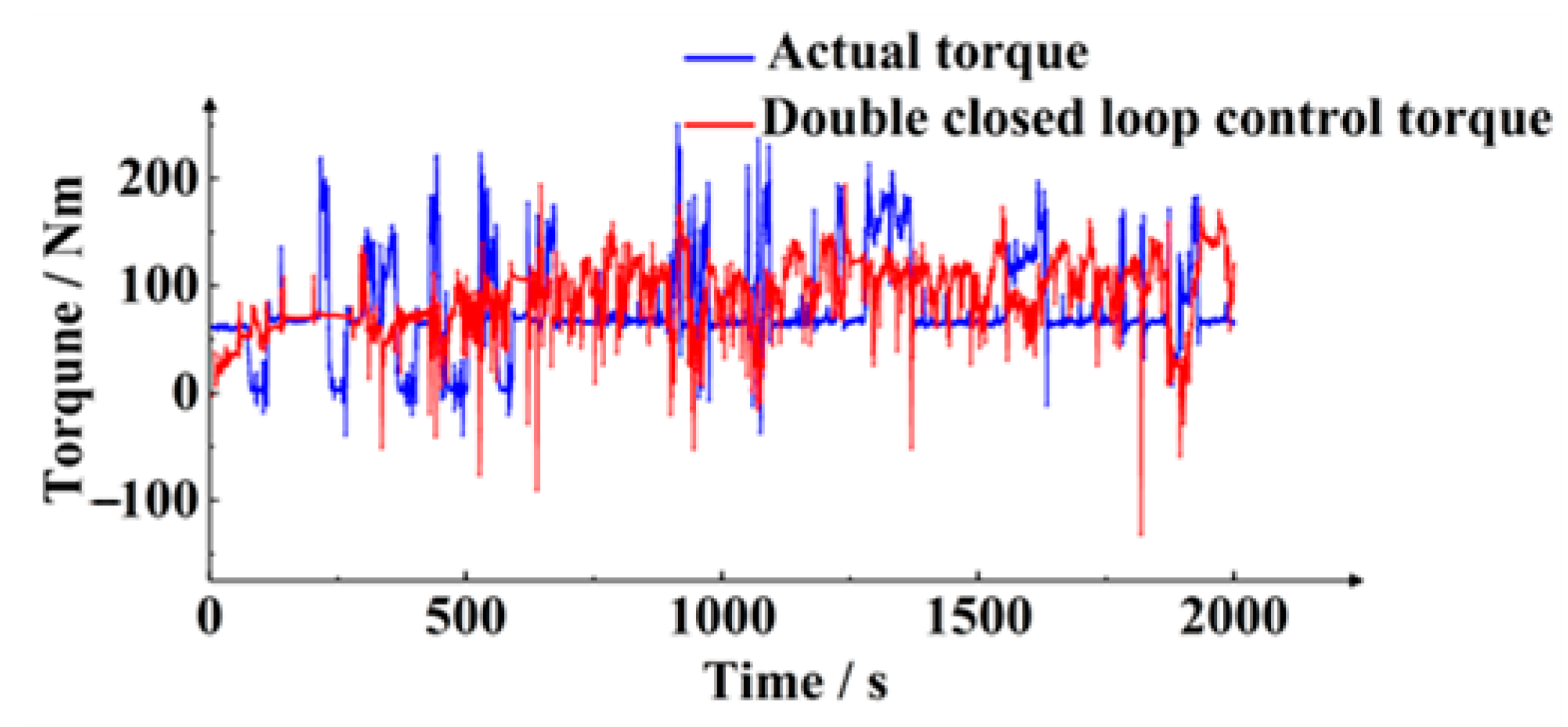
5.2. Experiment of Double Closed Loop Control of Temperature and Rotational Speed
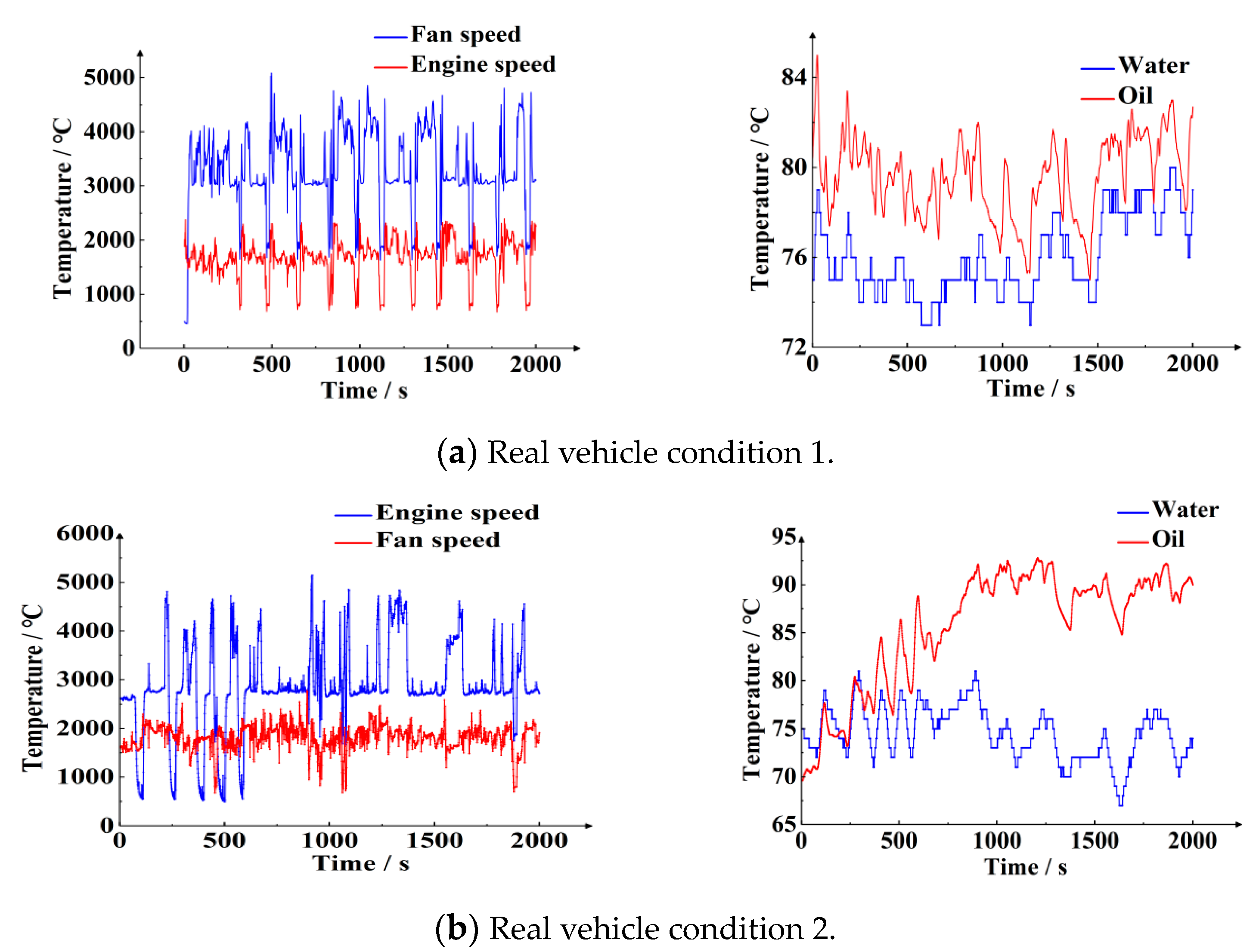
5.2.1. Experiment Condition
5.2.2. Real Vehicle Condition 1
5.2.3. Real Vehicle Condition 2
5.3. HSCS Domain Range Experiment
5.3.1. Experiment Scheme
5.3.2. Experiment Results and Analysis
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Meng, Q.R.; Hou, Y.F. Mechanism of hydro-viscous soft start of belt conveyor. J. China Univ. Min. Technol. Engl. Ed. 2008, 18, 7. [Google Scholar] [CrossRef]
- Hou, Y.; Xie, F.; Huang, F. Control strategy of disc braking systems for downward belt conveyors. Min. Sci. Technol. China Univ. Min. Technol. 2011, 21, 491–494. [Google Scholar] [CrossRef]
- Liao, X.; Yang, S.; Hu, D.; Gong, G. Analysis and revision of torque formula for hydro-viscous clutch. Energies 2021, 14, 103390. [Google Scholar] [CrossRef]
- Cui, H.; Lian, Z.; Li, L.; Wang, Q. Analysis of influencing factors on oil film shear torque of hydro-viscous drive. Ind. Lubr. Tribol. 2018, 70, 1169–1175. [Google Scholar] [CrossRef]
- Bullough, W.A.; Johnson, A.R.; Hosseini-Sianaki, A.; Makin, J.; Firoozian, R. Electro-rheological clutch: Design, performance characteristics and operation. Proc. Inst. Mech. Eng. Part I J. Syst. Control Eng. 1993, 207, 87–95. [Google Scholar] [CrossRef]
- Meng, Q.R.; Hou, Y.F. Effect of oil film squeezing on hydro-viscous drive speed regulating start. Tribol. Int. 2010, 43, 2134–2138. [Google Scholar]
- Xue, J.; Ma, B.; Chen, M.; Zhang, Q.; Zheng, L. Experimental investigation and fault diagnosis for buckled wet clutch based on multi-speed hilbert spectrum entropy. Entropy 2021, 23, 1704. [Google Scholar] [CrossRef] [PubMed]
- Gong, G.; Wang, F.; Qin, Y.; Zhang, Y.; Sun, C.; Yang, H. The design of low cost valve-and-pump compounded pressure control system for the hydro viscous clutch. Mechatronics 2020, 65, 102310. [Google Scholar] [CrossRef]
- Ahamed, R.; Ferdaus, M.M.; Li, Y. Advancement in energy harvesting magneto-rheological fluid damper: A review. Korea Aust. Rheol. J. 2016, 28, 355–379. [Google Scholar] [CrossRef]
- Ma, L.G.; Xiang, C.L.; Zou, T.G.; Mao, F.H. Research on Control Strategy of Hydro-Viscous Driven Fan Cooling System. Appl. Mech. Mater. 2014, 722, 182–189. [Google Scholar] [CrossRef]
- Ding, H.; Zhao, J. A new method of improving low-speed performance of variable speed hydraulic systems: By leaking parallel valve control. Adv. Mech. Eng. 2014, 2014, 967373. [Google Scholar] [CrossRef]
- Ferreira, F.J.; Fong, J.A.; de Almeida, A.T. Ecoanalysis of variable-speed drives for flow regulation in pumping systems. IEEE Trans. Ind. Electron. 2011, 58, 2117–2125. [Google Scholar] [CrossRef]
- Lamaddalena, N.; Khila, S. Energy saving with variable speed pumps in on-demand irrigation systems. Irrig. Sci. 2012, 30, 157–166. [Google Scholar] [CrossRef]
- Cui, J.; Li, H.; Zhang, D.; Xu, Y.; Xie, F. Multi-objective optimization of hydro-viscous flexible drive for dynamic characteristics using genetic algorithm. Ind. Lubr. Tribol. 2021, 73, 1003–1010. [Google Scholar] [CrossRef]
- Qi, H.; Liu, S.; Yang, R.; Yu, Y. Research on new intelligent pump control based on sliding mode variable structure control. In Proceedings of the 2017 IEEE International Conference on Mechatronics and Automation, ICMA 2017, Takamatsu, Japan, 6–9 August 2017; pp. 1239–1244. [Google Scholar]
- Yin, X.X.; Lin, Y.G.; Li, W.; Gu, H.G. Hydro-viscous transmission based maximum power extraction control for continuously variable speed wind turbine with enhanced efficiency. Renew. Energy 2016, 87, 646–655. [Google Scholar] [CrossRef]
- Jahmeerbacus, M.I. Flow rate regulation of a variable speed driven pumping system using fuzzy logic. In Proceedings of the 2015 4th International Conference on Electric Power and Energy Conversion Systems, EPECS 2015, Sharjah, United Arab Emirates, 24–26 November 2015; pp. 1–6. [Google Scholar]
- Kastrevc, M.; Puenjak, R. Fuzzy pressure control of hydraulic system with gear pump driven by variable speed induction electro-motor. Exp. Tech. 2005, 29, 57–62. [Google Scholar] [CrossRef]
- Ye, Y.; Yin, C.-B.; Gong, Y.; Zhou, J.-j. Position control of nonlinear hydraulic system using an improved PSO based PID controller. Mech. Syst. Signal Process. 2017, 83, 241–259. [Google Scholar] [CrossRef]
- Liang, H.; Zou, J.; Zuo, K.; Khan, M.J. An improved genetic algorithm optimization fuzzy controller applied to the wellhead back pressure control system. Mech. Syst. Signal Process. 2020, 142, 106708. [Google Scholar] [CrossRef]
- Ji, Y.; Zhang, J.; He, C.; Ma, R.; Hou, X.; Hu, H. Constraint performance pressure tracking control with asymmetric continuous friction compensation for booster based brake-by-wire system. Mech. Syst. Signal Process. 2022, 174, 109083. [Google Scholar] [CrossRef]
- Lu, J.; Xie, H.; Hu, L.; Yang, H.; Chen, Y. Variable-parameter feedforward control for centrifuge shaking table based on nonlinear frequency characteristic model. Mech. Syst. Signal Process. 2021, 161, 108011. [Google Scholar] [CrossRef]
- Song, Y.H.; Ba, K.X.; Wang, Y.; Zhang, J.X.; Yu, B.; Zhang, Q.W.; Kong, X.D. Study on nonlinear dynamic behavior and stability of aviation pressure servo valve-controlled cylinder system. Nonlinear Dyn. 2022, 108, 3077–3103. [Google Scholar] [CrossRef]
- Zhu, Q.; Huang, D.; Yu, B.; Ba, K.; Kong, X.; Wang, S. An improved method combined SMC and MLESO for impedance control of legged robots’ electro-hydraulic servo system. ISA Trans. 2022, 130, 598–609. [Google Scholar] [CrossRef] [PubMed]
- Chen, Z.; Li, J.; Wang, J.; Wang, S.; Zhao, J.; Li, J. Towards Hybrid Gait Obstacle Avoidance for a Six Wheel-Legged Robot with Payload Transportation. J. Intell. Robot. Syst. 2021, 102, 60. [Google Scholar] [CrossRef]
- Zhan, G.; Zhang, Z.; Chen, Z.; Li, T.; Wang, D.; Zhan, J.; Yan, Z. Stewart-inspired parallel spatial docking robot: Design, analysis and experimental results. Robot. Intell. Autom. 2023, 43, 313–326. [Google Scholar] [CrossRef]
- Ba, K.X.; Liu, G.J.; Ma, G.L.; Chen, C.H.; Pu, L.Y.; He, X.L.; Chen, X.; Wang, Y.; Zhu, Q.X.; Wang, D.K. Bionic perception and transmission neural device based on a self-powered concept. Cell Rep. Phys. Sci. 2024, 5, 102048. [Google Scholar] [CrossRef]
- Huang, Y.; Meng, Z.; Sun, J. Scalable distributed least square algorithms for large-scale linear equations via an optimization approach. Automatica 2022, 146, 110572. [Google Scholar] [CrossRef]
- Ruder, S. An overview of gradient descent optimization algorithms. arXiv 2016, arXiv:1609.04747. [Google Scholar]
- Fang, Y.; Mo, H. Slope Stability Analysis Based on The Memoryless Least Square Quasi-Newton Method. Chin. J. Rock Mech. Eng. 2002, 21, 34–38. [Google Scholar]
- Taherkhorsandi, M.; Castillo-Villar, K.K.; Mahmoodabadi, M.J.; Janaghaei, F.; Mortazavi Yazdi, S.M. Optimal Sliding and Decoupled Sliding Mode Tracking Control by Multi-objective Particle Swarm Optimization and Genetic Algorithms. In Advances and Applications in Sliding Mode Control Systems; Springer International Publishing: Cham, Switzerland, 2015. [Google Scholar] [CrossRef]
- Zhang, S.; Xu, H.; Zhang, H.; Yang, S. Game-relationship-based remanufacturing scheduling model with sequence-dependent setup times using improved discrete particle swarm optimization algorithm. Concurr. Eng. Res. Appl. 2022, 30, 424–441. [Google Scholar] [CrossRef]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Oil Pressure (MPa) | Experimental Value (r/min) | Simulated Value (r/min) | Error (%) | |
|---|---|---|---|---|
| 1 | 0.205 | 2039 | 2198 | 7.9 |
| 2 | 0.407 | 2964 | 2850 | 3.8 |
| Oil Pressure (MPa) | Experimental Value (r/min) | Simulated Value (r/min) | Error (%) | |
|---|---|---|---|---|
| 1 | 0.206 | 1988 | 2148 | 8.0 |
| 2 | 0.402 | 2814 | 2850 | 1.3 |
| Evaluation Index | Open Loop Control | Feedforward Compensation | Double Closed Loop Control |
|---|---|---|---|
| Speed control domain of ascending phase | 14~37% | 3~35% | 3~35% |
| Speed control domain of descending phase | 0~21% | 3~35% | 3~35% |
| Effective speed control ratio | 57~62% | 86% | 86% |
| Control hysteresis loop | 43% | 22% | 14% |
| Nonlinearity of ascending phase | 21% | 19% | 15% |
| Nonlinearity of descending phase | 12% | 10% | 6% |
| Evaluation Index | Open Loop Control | Feedforward Compensation | Double Closed Loop Control |
|---|---|---|---|
| Speed control domain of ascending phase | 13~26% | 2~25% | 3~25% |
| Speed control domain of descending phase | 0~17% | 2~25% | 3~25% |
| Effective speed control ratio | 50~65% | 88% | 87% |
| Control hysteresis loop | 39% | 10% | 5% |
| Nonlinearity of ascending phase | 21% | 8% | 9% |
| Nonlinearity of descending phase | 18% | 9% | 6% |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhao, K.; Wang, Y.; Wang, S.; Gao, F.; Feng, X.; Shen, H.; Zhang, L.; Wang, L.; Yu, B.; Ba, K. A Novel Double Closed Loop Control of Temperature and Rotational Speed for Integrated Multi-Parameter Hydro-Viscous Speed Control System (HSCS). Machines 2024, 12, 394. https://doi.org/10.3390/machines12060394
Zhao K, Wang Y, Wang S, Gao F, Feng X, Shen H, Zhang L, Wang L, Yu B, Ba K. A Novel Double Closed Loop Control of Temperature and Rotational Speed for Integrated Multi-Parameter Hydro-Viscous Speed Control System (HSCS). Machines. 2024; 12(6):394. https://doi.org/10.3390/machines12060394
Chicago/Turabian StyleZhao, Kai, Yuan Wang, Shoukun Wang, Feiyue Gao, Xiang Feng, Hu Shen, Lin Zhang, Liang Wang, Bin Yu, and Kaixian Ba. 2024. "A Novel Double Closed Loop Control of Temperature and Rotational Speed for Integrated Multi-Parameter Hydro-Viscous Speed Control System (HSCS)" Machines 12, no. 6: 394. https://doi.org/10.3390/machines12060394