
Influence of Sampling Frequency Ratio on Mode Mixing Alleviation Performance: A Comparative Study of Four Noise-Assisted Empirical Mode Decomposition Algorithms



Abstract
:1. Introduction
2. Materials and Methods
2.1. Notations
2.2. EMD
2.3. EEMD
2.4. CEEMD
2.5. CEEMDAN
2.6. ICEEMDAN
3. Metric
4. Comparative Results and Discussion
5. Conclusions
- (1)
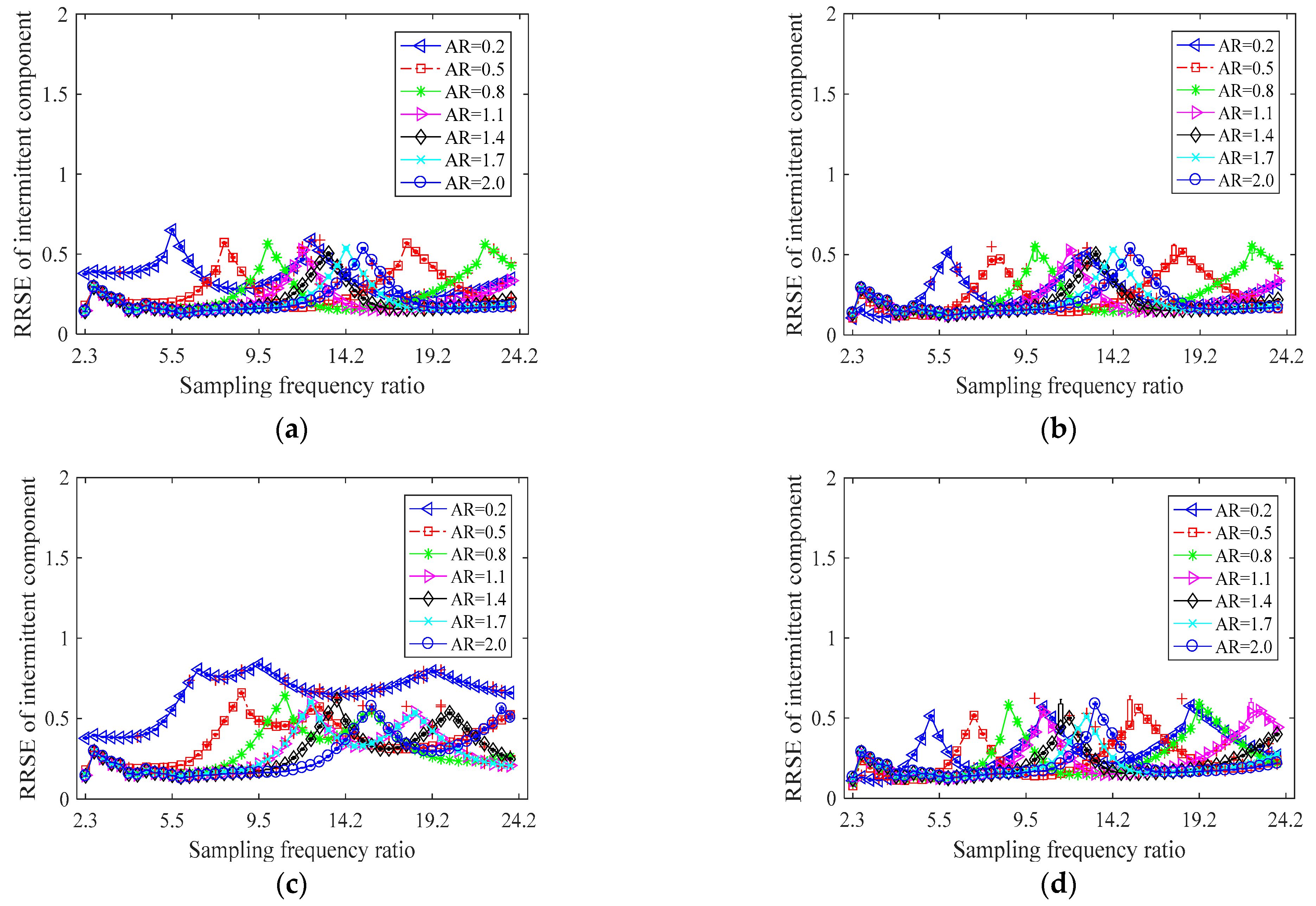
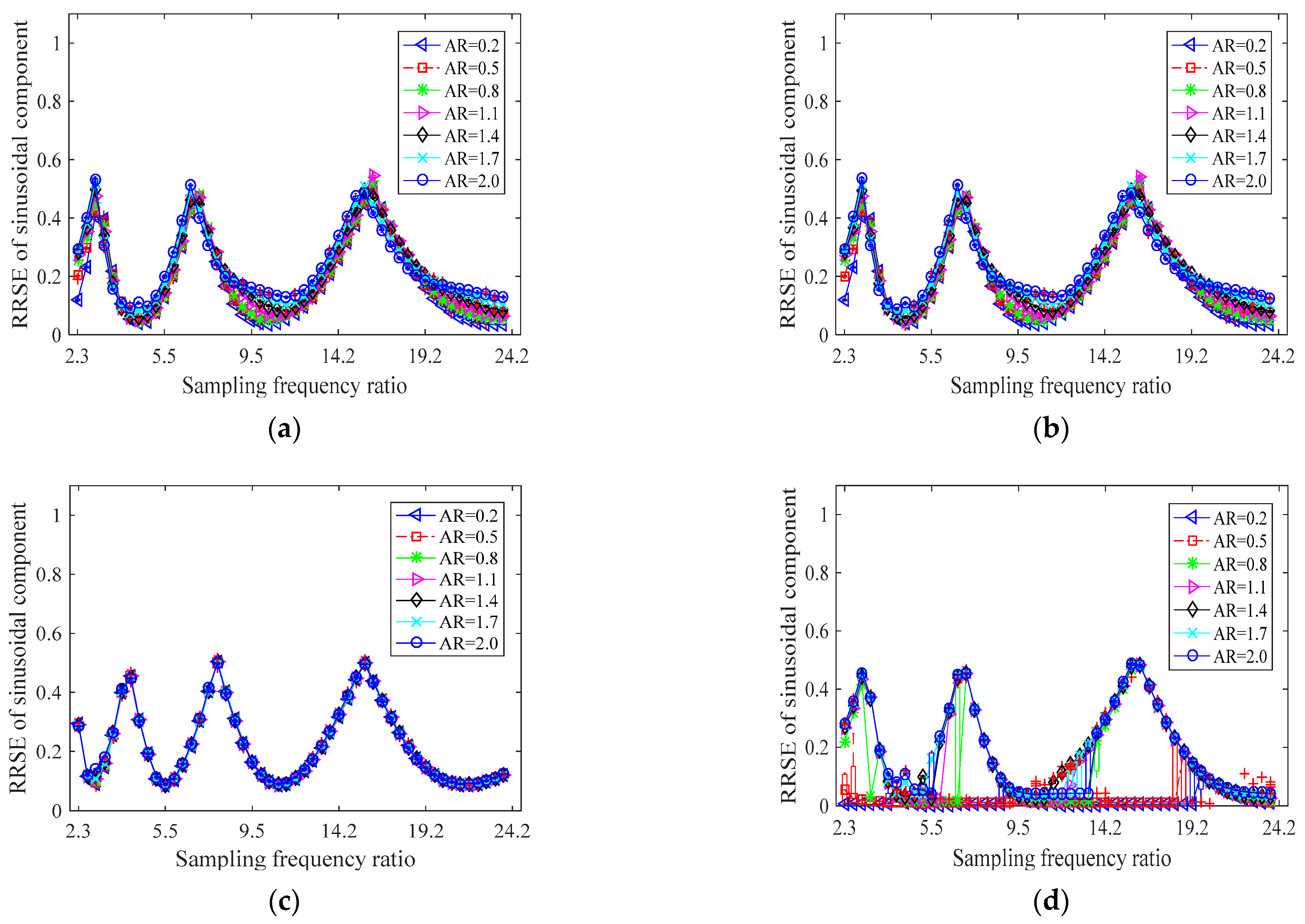
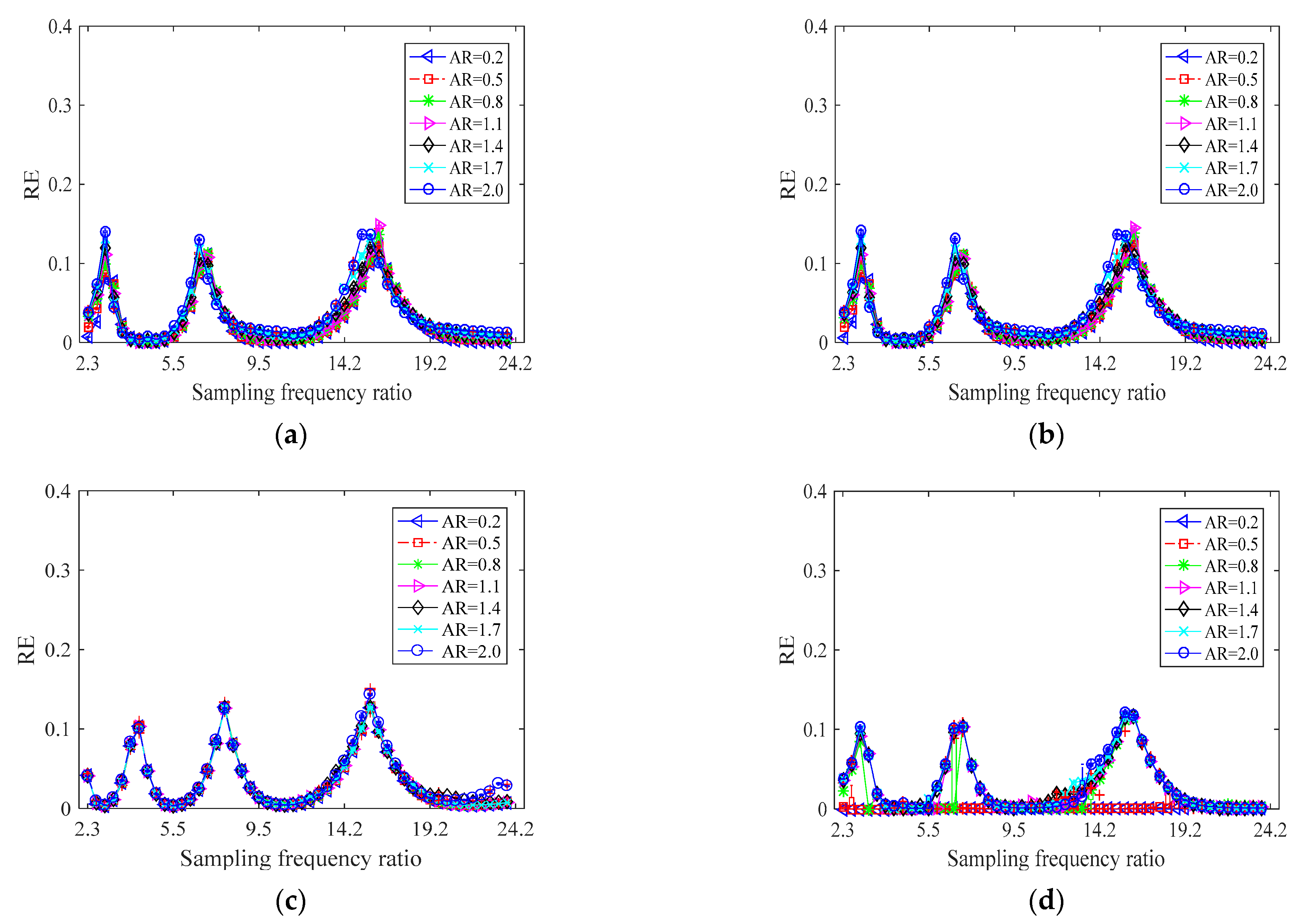
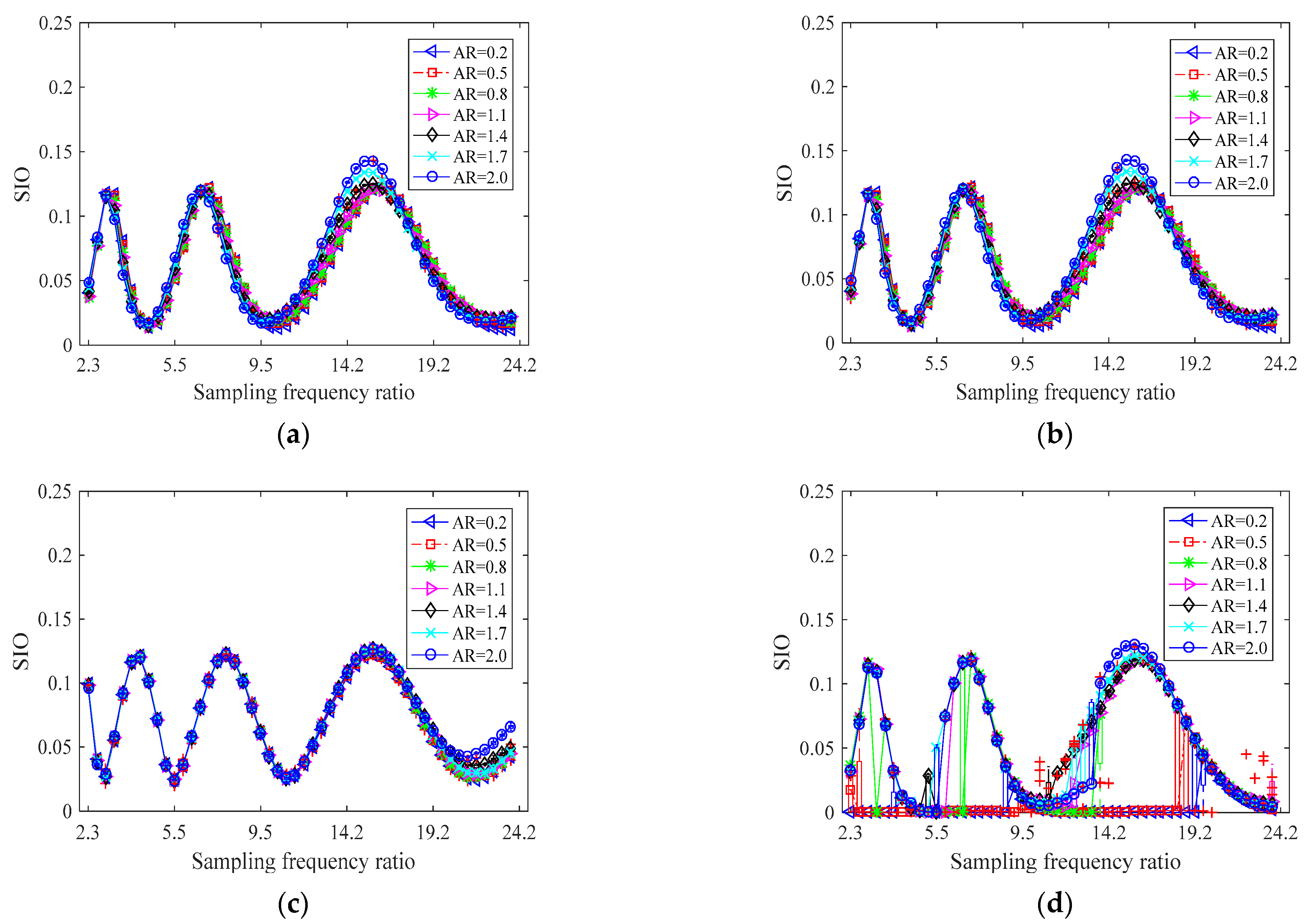
- The SFR affects the mode mixing alleviation performance of the four noise-assisted EMD algorithms significantly.
- (2)
- The decomposition instability phenomenon appears in the four noise-assisted EMD algorithms, especially in ICEEMDAN.
- (3)
- ICEEMDAN has the best mode mixing alleviation performance for decomposing the signal with an intermittent component among the four noise-assisted EMD algorithms.
- (4)
- Selecting an appropriate SFR can improve the mode mixing alleviation performance of the four noise-assisted EMD algorithms.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Abbreviations
| AR | Amplitude ratio |
| CEEMD | Complementary ensemble empirical mode decomposition |
| CEEMDAN | Complete ensemble empirical mode decomposition with adaptive noise |
| EMD | Empirical mode decomposition |
| EEMD | Ensemble empirical mode decomposition |
| ICEEMDAN | Improved complete ensemble empirical mode decomposition with adaptive noise |
| IMF | Intrinsic mode function |
| RE | Residual energy |
| RRSE | Root relative squared error |
| SFR | Sampling frequency ratio |
| SIO | Successive IMF orthogonality |
| SVM | Support vector regression |
Appendix A
- (1)
- Initialize the ensemble number , the amplitude of the added white noise , and ;
- (2)
- Perform the mth trial.
- (3)
- Calculate ensemble mean and residual as final results:
Appendix B
- (1)
- Decompose the mixed signal using EMD to obtain the first IMF ( = 1, 2, 3,…, M) at the th trial, and then calculate the mean of all first IMFs obtained at M trials:
- (2)
- Obtain the first residue :
- (3)
- Use EMD to decompose the mixed signal , , to get , and define the mean of these modes as the second IMF of CEEMDAN:
- (4)
- For subsequent stages (), compute the ith residue:Calculate at the th trial, and define the mean of these modes as the (i + 1)th IMF of CEEMDAN:
- (5)
- Repeat (4) for the next i until the stop criterion is reached.
Appendix C
- (1)
- Construct the mixed signal by adding to the original signal :
- (2)
- Calculate the local mean by using EMD, and obtain the first residual by an average of M trials:then calculate the first final IMF .
- (3)
- Obtain the second IMF , where ;
- (4)
- Similarly, for the ith IMF: , where .
- (5)
- Repeat step (4) for i + 1 until the stop criterion is reached.
References
- Liu, T.; Luo, Z.; Huang, J.; Yan, S. A comparative study of four kinds of adaptive decomposition algorithms and their applications. Sensors 2018, 18, 2120. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Huang, N.E.; Shen, Z.; Long, S.R.; Wu, M.C.; Shih, H.H.; Zheng, Q.; Yen, N.C.; Tung, C.C.; Liu, H.H. The empirical mode decomposition and the Hilbert spectrum for nonlinear and non-stationary time series analysis. Proc. R. Soc. A Math. Phys. Eng. Sci. 1998, 454, 903–995. [Google Scholar] [CrossRef]
- Wu, Z.; Huang, N.E. Ensemble empirical mode decomposition: A noise-assisted data analysis method. Adv. Adapt. Data Anal. 2009, 1, 1–41. [Google Scholar] [CrossRef]
- Yeh, J.; Shieh, J.; Huang, N.E. Complementary ensemble empirical mode decomposition: A novel noise enhanced data analysis method. Adv. Adapt. Data Anal. 2010, 2, 135–156. [Google Scholar] [CrossRef]
- Torres, M.E.; Colominas, M.A.; Schlotthauer, G.; Flandrin, P. A complete ensemble empirical mode decomposition with adaptive noise. In Proceedings of the 2011 IEEE International Conference on Acoustics, Speech and Signal Processing (ICASSP), Prague, Czech Republic, 22–27 May 2011; pp. 4144–4147. [Google Scholar]
- Colominas, M.A.; Schlotthauer, G.; Torres, M.E.; Flandrin, P. Noise-assisted EMD methods in action. Adv. Adapt. Data Anal. 2012, 4, 1250025. [Google Scholar] [CrossRef] [Green Version]
- Colominas, M.A.; Schlotthauer, G.; Torres, M.E. Improved complete ensemble EMD: A suitable tool for biomedical signal processing. Biomed. Signal Process. Control 2014, 14, 19–29. [Google Scholar] [CrossRef]
- Chen, W.; Chen, Y.; Liu, W. Ground roll attenuation using improved complete ensemble empirical mode decomposition. J. Seism. Explor. 2016, 25, 485–495. [Google Scholar]
- Lei, Y.; Liu, Z.; Ouazri, J.; Lin, J. A fault diagnosis method of rolling element bearings based on CEEMDAN. Proc. Inst. Mech. Eng. Part C J. Mech. Eng. Sci. 2017, 231, 1804–1815. [Google Scholar] [CrossRef]
- Ren, Y.; Suganthan, P.N.; Srikanth, N. A comparative study of empirical mode decomposition-based short-term wind speed forecasting methods. IEEE Trans. Sustain. Energy 2015, 6, 236–244. [Google Scholar] [CrossRef]
- Chen, H.; Chen, P.; Chen, W.; Cai, L.; Shen, J.; Wu, J.; Wu, M. Study on effects of sampling frequency on performance of EEMD. China Mech. Eng. 2016, 27, 2472–2476. [Google Scholar]
- Sharma, R.; Vignolo, L.; Schlotthauer, G.; Colominas, M.A.; Rufiner, H.L.; Prasanna, S.R.M. Empirical mode decomposition for adaptive AM-FM analysis of Speech: A Review. Speech Commun. 2017, 88, 39–64. [Google Scholar] [CrossRef]
- Shen, W.C.; Chen, Y.H.; Wu, A.Y.A. Low-complexity sinusoidal-assisted EMD (SAEMD) algorithms for solving mode-mixing problems in HHT. Digit. Signal Process. A Rev. J. 2014, 24, 170–186. [Google Scholar] [CrossRef]
- Xue, X.; Zhou, J.; Xu, Y.; Zhu, W.; Li, C. An adaptively fast ensemble empirical mode decomposition method and its applications to rolling element bearing fault diagnosis. Mech. Syst. Signal Process. 2015, 62, 444–459. [Google Scholar] [CrossRef]
- Zhao, L.; Yu, W.; Yan, R. Gearbox fault diagnosis using complementary ensemble empirical mode decomposition and permutation entropy. Shock Vib. 2016, 2016, 1–8. [Google Scholar] [CrossRef] [Green Version]
- Nouioua, M.; Bouhalais, M.L. Vibration-based tool wear monitoring using artificial neural networks fed by spectral centroid indicator and RMS of CEEMDAN modes. Int. J. Adv. Manuf. Technol. 2021, 115, 3149–3161. [Google Scholar] [CrossRef]
- Bouhalais, M.L.; Nouioua, M. The analysis of tool vibration signals by spectral kurtosis and ICEEMDAN modes energy for insert wear monitoring in turning operation. Int. J. Adv. Manuf. Technol. 2021, 115, 2989–3001. [Google Scholar] [CrossRef]
- Tao, R.; Zhang, Y.; Wang, L.; Zhao, X. Research of tool state recognition based on CEEMD-WPT. In Proceedings of the International Conference on Cloud Computing and Security, Haikou, China, 8–10 June 2018; Springer International Publishing: Berlin/Heidelberg, Germany, 2018; Volume 2, pp. 334–343. [Google Scholar]
- Xu, C.; Chai, Y.; Li, H.; Shi, Z. Estimation the wear state of milling tools using a combined ensemble empirical mode decomposition and support vector machine method. J. Adv. Mech. Des. Syst. Manuf. 2018, 12, 1–18. [Google Scholar] [CrossRef] [Green Version]
- Zhao, Y.; Adjallah, K.H.; Sava, A. Influence study of the intermittent wave amplitude vs. the sampling frequency ratio on ICEEMDAN mode mixing alleviation performance. In Proceedings of the International Conference on Digital Signal Processing, DSP, Shanghai, China, 19–21 November 2018; pp. 1–5. [Google Scholar]
- Stevenson, N.; Mesbah, M.; Boashash, B. A sampling limit for the empirical mode decomposition. In Proceedings of the 8th International Symposium on Signal Processing and Its Applications Process, Sydney, Australia, 28–31 August 2005; Volume 2, pp. 647–650. [Google Scholar] [CrossRef]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| EEMD | CEEMD | CEEMDAN | ICEEMDAN | |
|---|---|---|---|---|
| Does it require optimal selections of the noise amplitude and the number of ensemble trials? | Yes | Yes | Yes | Yes |
| Does it contain the residual noise in the reconstructed signal? | Yes | No | No | No |
| Can it generate a different number of modes from one trial to another? | Yes | Yes | No | No |
| Does it contain residual noises in final modes? | Yes | Yes | Yes | Less |
| Symbols | Decomposition Algorithms | Notes |
|---|---|---|
| k | EEMD, CEEMD, CEEMDAN, and ICEEMDAN | th sample point |
| EEMD, CEEMD, CEEMDAN, and ICEEMDAN | Number of IMFs | |
| EEMD, CEEMD, CEEMDAN, and ICEEMDAN | Final ith IMF | |
| EEMD, CEEMD, CEEMDAN, and ICEEMDAN | Final ith residual | |
| EEMD, CEEMD, CEEMDAN and ICEEMDAN | Ensemble number | |
| EEMD, CEEMD, CEEMDAN, and ICEEMDAN | White noise added in the mth trial | |
| EEMD and CEEMD | Noise amplitude | |
| and | CEEMDAN and ICEEMDAN | Noise amplitude |
| EEMD, CEEMDAN, and ICEEMDAN | ith IMF in the mth trial | |
| EEMD, CEEMDAN, and ICEEMDAN | ith residual in the mth trial | |
| CEEMD | mth mixed-signal with positive noises | |
| CEEMD | mth mixed-signal with negative noises | |
| CEEMD | ith IMF in the mth trial with positive noises | |
| CEEMD | ith IMF in the mth trial with negative noises |
| RRSE of x2(k) | RE | SIO | |
|---|---|---|---|
| 1 | 0.2081 | 0.0216 | 0.0789 |
| 2 | 0.2002 | 0.0200 | 0.0768 |
| 3 | 0.0129 | 0.0001 | 0.0006 |
| 4 | 0.2212 | 0.0245 | 0.0828 |
| 5 | 0.2233 | 0.0249 | 0.0827 |
| 6 | 0.0132 | 0.0001 | 0.0006 |
| 7 | 0.2127 | 0.0226 | 0.0801 |
| 8 | 0.0127 | 0.0001 | 0.0006 |
| 9 | 0.0129 | 0.0001 | 0.0005 |
| 10 | 0.2039 | 0.0208 | 0.0777 |
| 11 | 0.2314 | 0.0268 | 0.0853 |
| 12 | 0.0129 | 0.0001 | 0.0005 |
| 13 | 0.0130 | 0.0001 | 0.0006 |
| 14 | 0.0128 | 0.0001 | 0.0006 |
| 15 | 0.0131 | 0.0001 | 0.0006 |
| 16 | 0.2230 | 0.0249 | 0.0826 |
| 17 | 0.0127 | 0.0001 | 0.0006 |
| 18 | 0.0129 | 0.0001 | 0.0005 |
| 19 | 0.0132 | 0.0001 | 0.0006 |
| 20 | 0.0130 | 0.0001 | 0.0006 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhao, Y.; Adjallah, K.H.; Sava, A.; Wang, Z. Influence of Sampling Frequency Ratio on Mode Mixing Alleviation Performance: A Comparative Study of Four Noise-Assisted Empirical Mode Decomposition Algorithms. Machines 2021, 9, 315. https://doi.org/10.3390/machines9120315
Zhao Y, Adjallah KH, Sava A, Wang Z. Influence of Sampling Frequency Ratio on Mode Mixing Alleviation Performance: A Comparative Study of Four Noise-Assisted Empirical Mode Decomposition Algorithms. Machines. 2021; 9(12):315. https://doi.org/10.3390/machines9120315
Chicago/Turabian StyleZhao, Yanqing, Kondo H. Adjallah, Alexandre Sava, and Zhouhang Wang. 2021. "Influence of Sampling Frequency Ratio on Mode Mixing Alleviation Performance: A Comparative Study of Four Noise-Assisted Empirical Mode Decomposition Algorithms" Machines 9, no. 12: 315. https://doi.org/10.3390/machines9120315
APA StyleZhao, Y., Adjallah, K. H., Sava, A., & Wang, Z. (2021). Influence of Sampling Frequency Ratio on Mode Mixing Alleviation Performance: A Comparative Study of Four Noise-Assisted Empirical Mode Decomposition Algorithms. Machines, 9(12), 315. https://doi.org/10.3390/machines9120315