
Design and Multi-Objective Optimization of a 12-Slot/10-Pole Integrated OBC Using Magnetic Equivalent Circuit Approach

 ,
,  ,
,  ,
,
Abstract
:1. Introduction
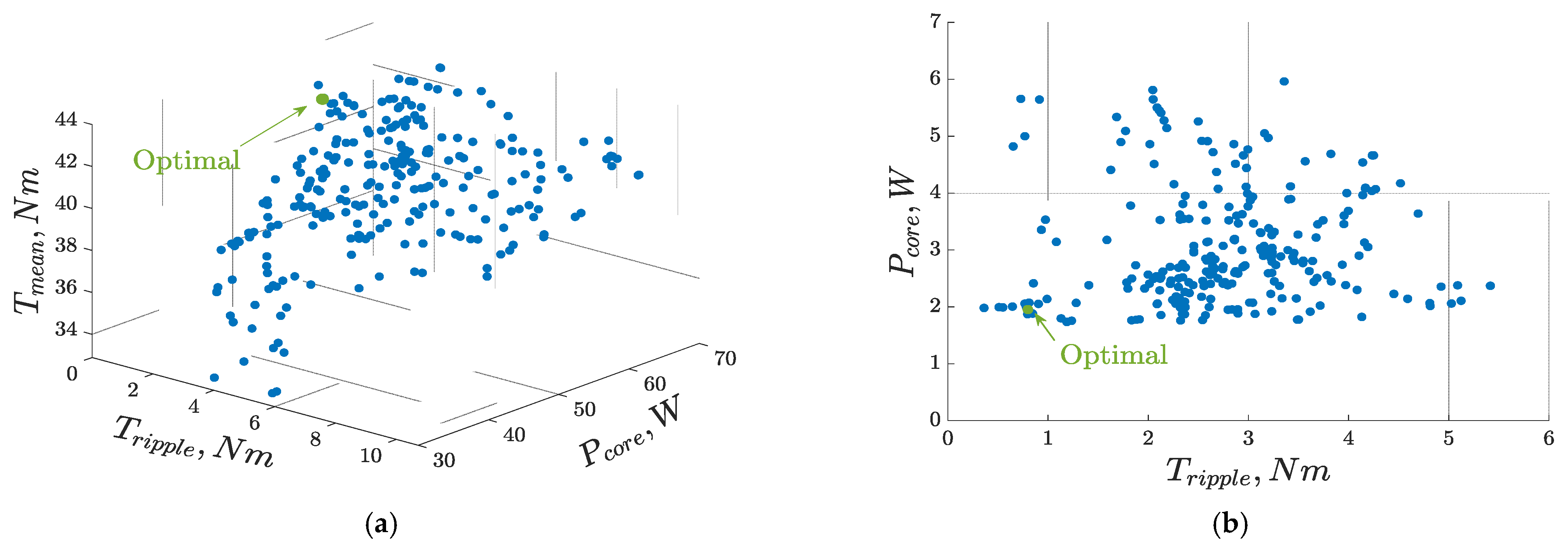
- Multi-objective genetic algorithm (MOGA) optimization of the employed integrated OBC considering average output torque, torque ripple under propulsion, core losses under propulsion, torque ripple under charging, and core losses under charging.
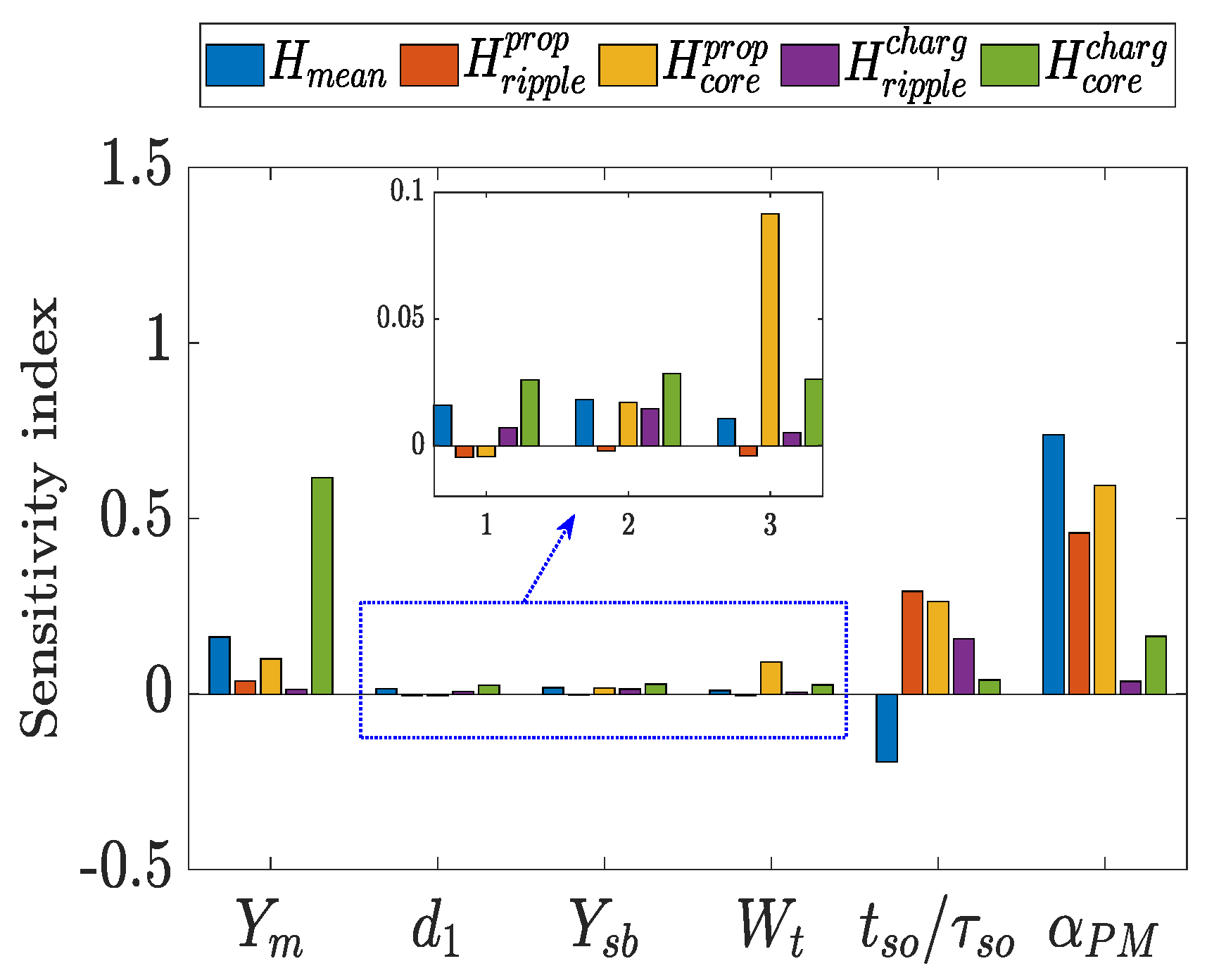
- Sensitivity analysis to identify the influence of each design parameter on the various optimization performances of the SPM machine.
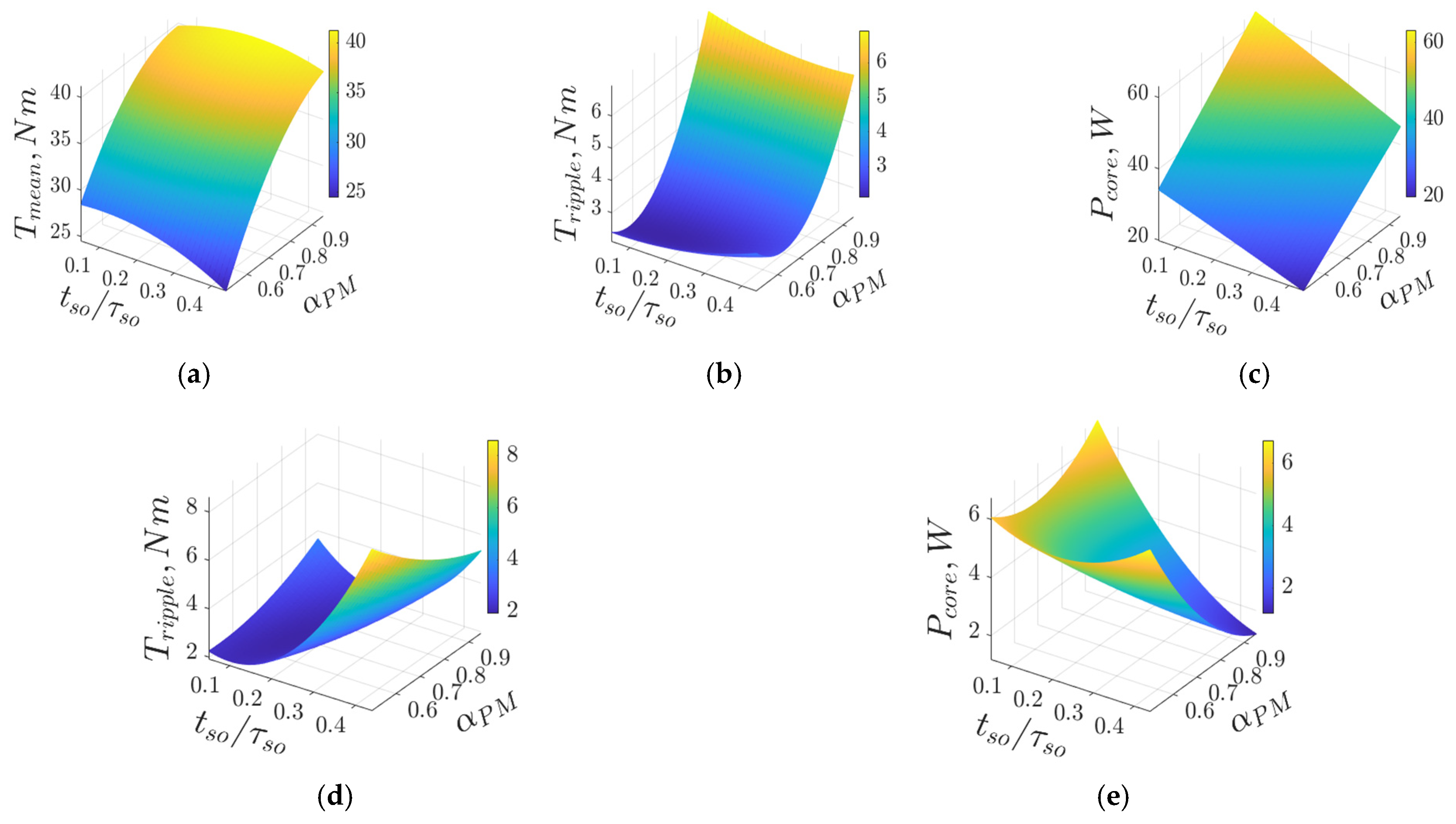
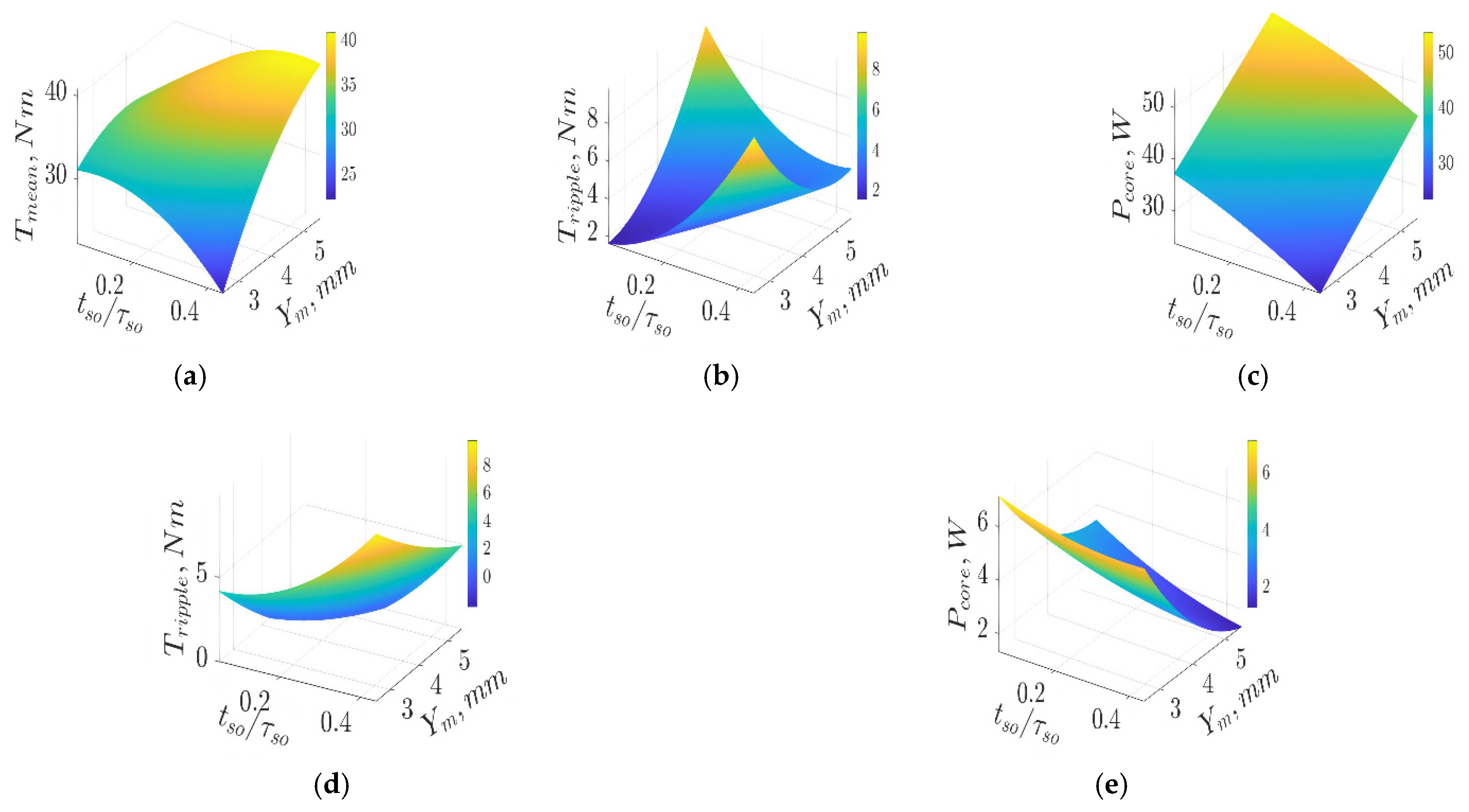
- Response surface (RS) methodology to illustrate the relationship between the optimization objectives and high-sensitive design parameters.
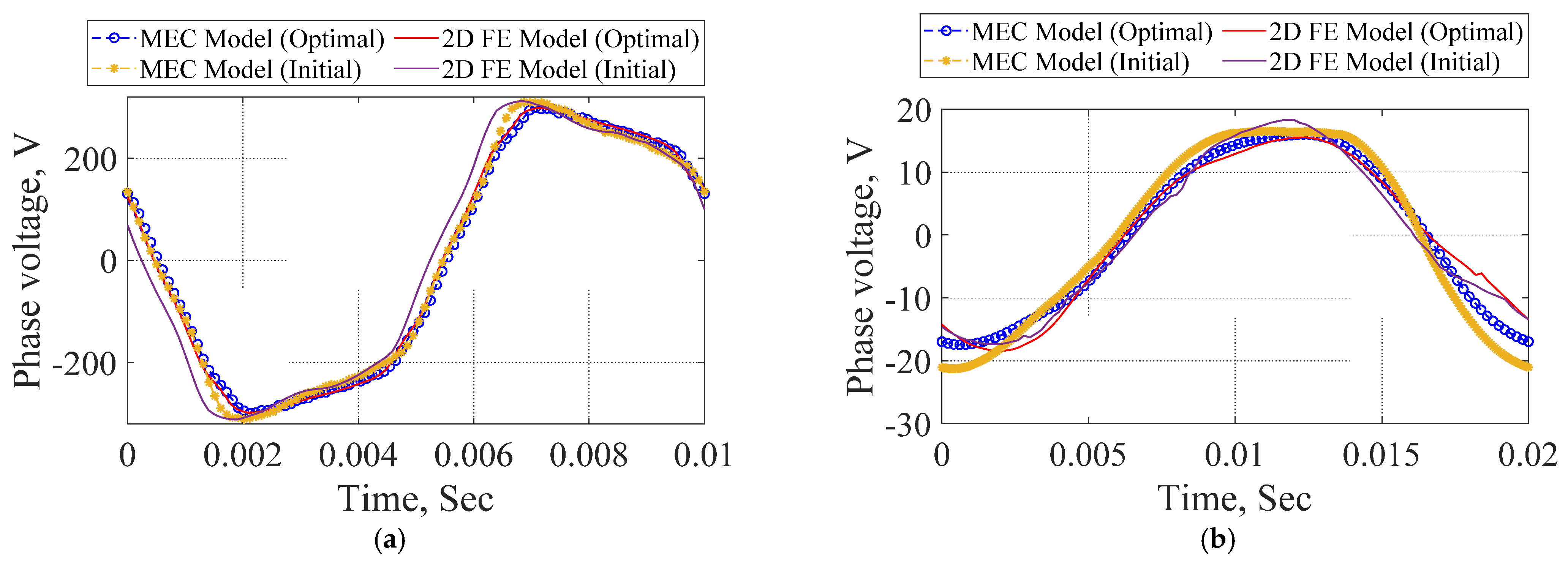
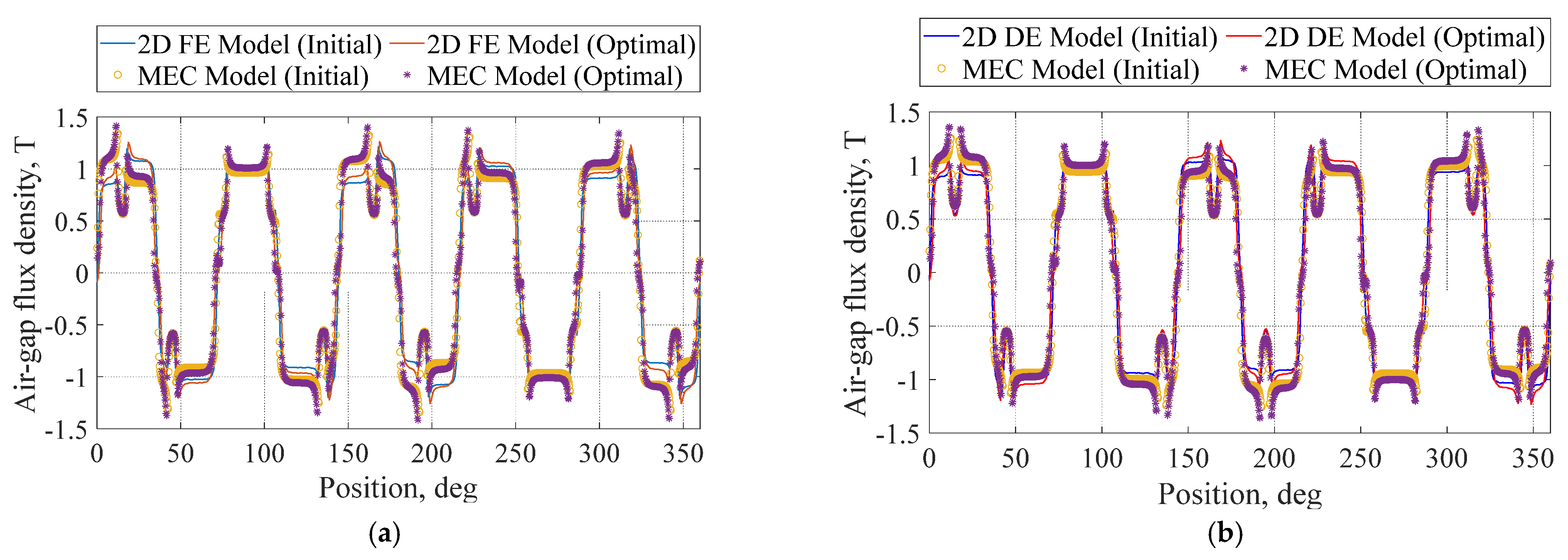
- Improved electromagnetic performances, namely, torque profile and core losses, under both operational modes were obtained and validated using finite element analysis (FEA).
2. Design Requirements and Integrated EV Charging Application
3. Parametric MEC Model
4. Motor Topology and Optimization Model
4.1. Motor Topology
4.2. Optimization Model
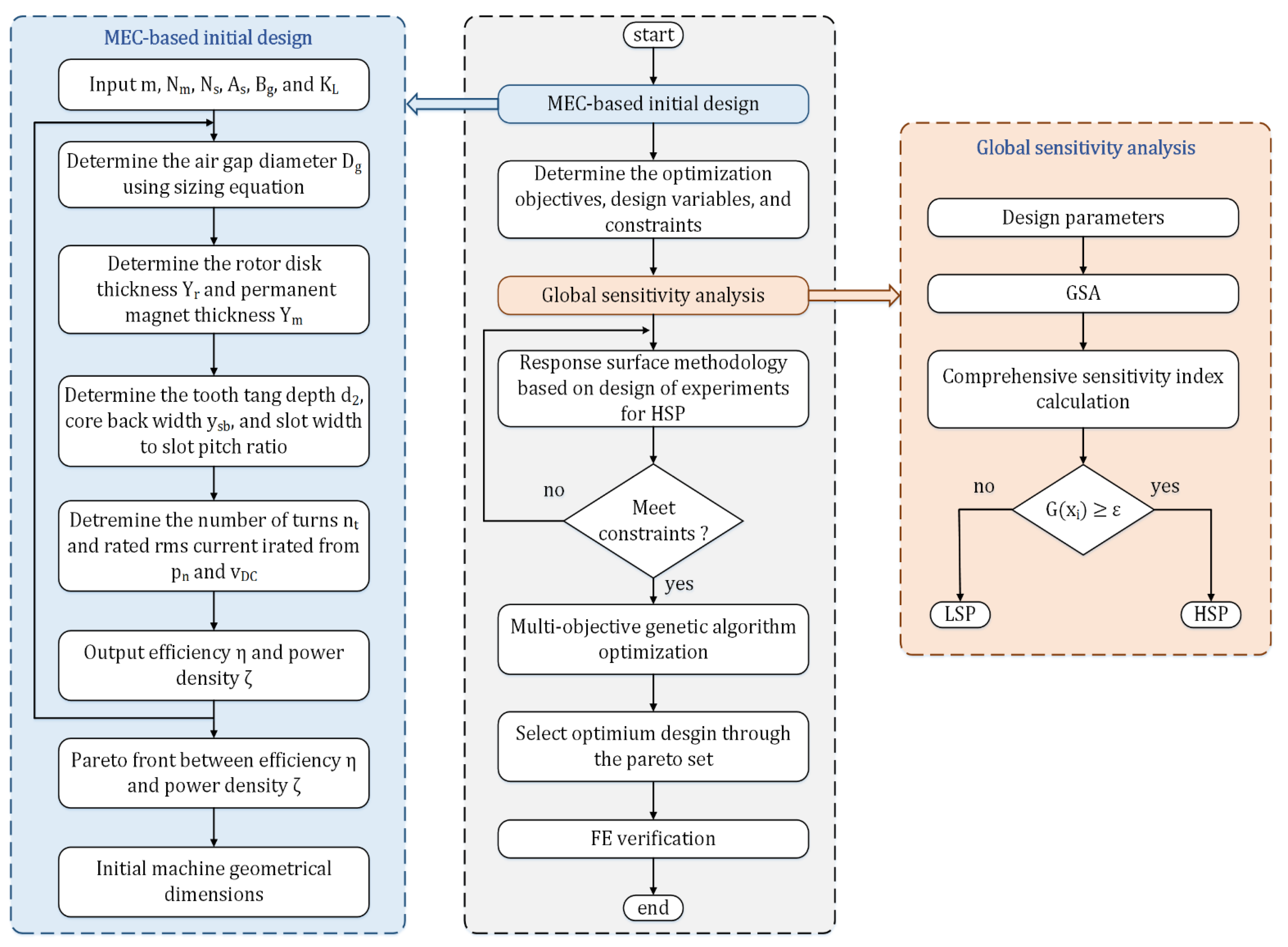
5. Overview of the Overall Design Optimization Process
5.1. Comprehensive Sensitivity Analysis
5.2. Flowchart of the Design Optimization Approach
6. Multi-Objective Optimization Approach
6.1. Box–Behnken Response Surface Method
6.2. Multi-Objective Genetic Algorithm (MOGA)
7. Finite Element Validation
8. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Pescetto, P.; Pellegrino, G. Integrated Isolated OBC for EVs with 6-phase Traction Motor Drives. In Proceedings of the 2020 IEEE Energy Conversion Congress and Exposition (ECCE), Detroit, MI, USA, 11–15 October 2020; IEEE: Piscataway, NJ, USA, 2020; pp. 4112–4117. [Google Scholar]
- Metwly, M.Y.; Abdel-Majeed, M.S.; Abdel-Khalik, A.S.; Hamdy, R.A.; Hamad, M.S.; Ahmed, S. A Review of Integrated On-Board EV Battery Chargers: Advanced Topologies, Recent Developments and Optimal Selection of FSCW Slot/Pole Combination. IEEE Access 2020, 8, 85216–85242. [Google Scholar] [CrossRef]
- De Santiago, J.; Bernhoff, H.; Ekergård, B.; Eriksson, S.; Ferhatovic, S.; Waters, R.; Leijon, M. Electrical Motor Drivelines in Commercial All-Electric Vehicles: A Review. IEEE Trans. Veh. Technol. 2012, 61, 475–484. [Google Scholar] [CrossRef] [Green Version]
- Grunditz, E.A.; Thiringer, T. Performance Analysis of Current BEVs Based on a Comprehensive Review of Specifications. IEEE Trans. Transp. Electrif. 2016, 2, 270–289. [Google Scholar] [CrossRef]
- Bostanci, E.; Moallem, M.; Parsapour, A.; Fahimi, B. Opportunities and Challenges of Switched Reluctance Motor Drives for Electric Propulsion: A Comparative Study. IEEE Trans. Transp. Electrif. 2017, 3, 58–75. [Google Scholar] [CrossRef]
- Salem, A.; Narimani, M. A Review on Multiphase Drives for Automotive Traction Applications. IEEE Trans. Transp. Electrif. 2019, 5, 1329–1348. [Google Scholar] [CrossRef]
- El-Refaie, A.M. Fractional-Slot Concentrated-Windings Synchronous Permanent Magnet Machines: Opportunities and Challenges. IEEE Trans. Ind. Electron. 2010, 57, 107–121. [Google Scholar] [CrossRef]
- Hemeida, A.; Metwly, M.; Abdel-Khalik, A.; Ahmed, S. Optimal Design of A 12-Slot/10-Pole Six-Phase SPM Machine with Different Winding Layouts for Integrated On-Board EV Battery Charging. Energies 2021, 14, 1848. [Google Scholar] [CrossRef]
- Zhu, X.; Fan, D.; Xiang, Z.; Quan, L.; Hua, W.; Cheng, M. Systematic multi-level optimization design and dynamic control of less-rare-earth hybrid permanent magnet motor for all-climatic electric vehicles. Appl. Energy 2019, 253, 113549. [Google Scholar] [CrossRef]
- Yin, J.; Zhu, X.; Quan, L.; Zhang, C.; Xiang, Z. Comprehensive multi-objective scalarisation optimisation of a permanent magnet machine with correlation parameters stratified method. IET Electr. Power Appl. 2017, 11, 72–79. [Google Scholar] [CrossRef]
- Wang, D.; Wang, X.; Jung, S.-Y. Cogging Torque Minimization and Torque Ripple Suppression in Surface-Mounted Permanent Magnet Synchronous Machines Using Different Magnet Widths. IEEE Trans. Magn. 2013, 49, 2295–2298. [Google Scholar] [CrossRef]
- Zhu, X.; Wu, W.; Quan, L.; Xiang, Z.; Gu, W. Design and Multi-Objective Stratified Optimization of a Less-Rare-Earth Hybrid Permanent Magnets Motor With High Torque Density and Low Cost. IEEE Trans. Energy Convers. 2019, 34, 1178–1189. [Google Scholar] [CrossRef]
- Cao, D.; Zhao, W.; Ji, J.; Wang, Y. Parametric Equivalent Magnetic Network Modeling Approach for Multi-Objective Optimization of PM Machine. IEEE Trans. Ind. Electron. 2020, 68, 6619–6629. [Google Scholar] [CrossRef]
- Ding, L.; Liu, G.; Chen, Q.; Xu, G. A Novel Mesh-Based Equivalent Magnetic Network for Performance Analysis and Optimal Design of Permanent Magnet Machines. IEEE Trans. Energy Convers. 2019, 34, 1337–1346. [Google Scholar] [CrossRef]
- Tiegna, H.; Amara, Y.; Barakat, G. Overview of analytical models of permanent magnet electrical machines for analysis and design purposes. Math. Comput. Simul. 2013, 90, 162–177. [Google Scholar] [CrossRef]
- Cao, D.; Zhao, W.; Ji, J.; Ding, L.; Zheng, J. A Generalized Equivalent Magnetic Network Modeling Method for Vehicular Dual-Permanent-Magnet Vernier Machines. IEEE Trans. Energy Convers. 2019, 34, 1950–1962. [Google Scholar] [CrossRef]
- Pluk, K.J.W.; Jansen, J.W.; Lomonova, E.A. 3-D Hybrid Analytical Modeling: 3-D Fourier Modeling Combined With Mesh-Based 3-D Magnetic Equivalent Circuits. IEEE Trans. Magn. 2015, 51, 8208614. [Google Scholar] [CrossRef]
- Hemeida, A.; Lehikoinen, A.; Rasilo, P.; Vansompel, H.; Belahcen, A.; Arkkio, A.; Sergeant, P. A Simple and Efficient Quasi-3D Magnetic Equivalent Circuit for Surface Axial Flux Permanent Magnet Synchronous Machines. IEEE Trans. Ind. Electron. 2018, 66, 8318–8333. [Google Scholar] [CrossRef]
- Abdel-Khalik, A.S.; Ahmed, S.; Massoud, A.M. Performance Evaluation of an On-Board Integrated Battery Charger System Using a 12-Slot/10-Pole Surface-Mounted PM Propulsion Motor. In Proceedings of the 2017 9th IEEE-GCC Conference and Exhibition (GCCCE), Manama, Bahrain, 8–11 May 2017. [Google Scholar]
- Subotic, I.; Bodo, N.; Levi, E. Integration of Six-Phase EV Drivetrains Into Battery Charging Process With Direct Grid Connection. IEEE Trans. Energy Convers. 2017, 32, 1012–1022. [Google Scholar] [CrossRef] [Green Version]
- Subotic, I.; Bodo, N.; Levi, E.; Dumnic, B.; Milicevic, D.; Katic, V. Overview of fast on-board integrated battery chargers for electric vehicles based on multiphase machines and power electronics. IET Electr. Power Appl. 2016, 10, 217–229. [Google Scholar] [CrossRef]
- Bertotti, G. General properties of power losses in soft ferromagnetic materials. IEEE Trans. Magn. 1987, 24, 621–630. [Google Scholar] [CrossRef]
- Wang, J.; Yuan, X.; Atallah, K. Design Optimization of a Surface-Mounted Permanent-Magnet Motor With Concentrated Windings for Electric Vehicle Applications. IEEE Trans. Veh. Technol. 2012, 62, 1053–1064. [Google Scholar] [CrossRef]
- Ma, C.; Qu, L. Multiobjective Optimization of Switched Reluctance Motors Based on Design of Experiments and Particle Swarm Optimization. IEEE Trans. Energy Convers. 2015, 30, 1144–1153. [Google Scholar] [CrossRef] [Green Version]
- Zhu, X.; Shu, Z.; Quan, L.; Xiang, Z.; Pan, X. Multi-Objective Optimization of an Outer-Rotor V-Shaped Permanent Magnet Flux Switching Motor Based on Multi-Level Design Method. IEEE Trans. Magn. 2016, 52, 8205508. [Google Scholar] [CrossRef]
- Martínez-Iranzo, M.; Herrero, J.M.; Sanchis, J.; Blasco, X.; García-Nieto, S. Applied Pareto multi-objective optimization by stochastic solvers. Eng. Appl. Artif. Intell. 2009, 22, 455–465. [Google Scholar] [CrossRef]
- Zhu, X.; Xiang, Z.; Quan, L.; Chen, Y.; Mo, L. Multimode Optimization Research on a Multiport Magnetic Planetary Gear Permanent Magnet Machine for Hybrid Electric Vehicles. IEEE Trans. Ind. Electron. 2018, 65, 9035–9046. [Google Scholar] [CrossRef]














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| e-Golf Requirements | |
|---|---|
| Rated power (kW) | 5 |
| Rated speed (rpm) | 1200 |
| Maximum speed (rpm) | 10,500 |
| Rated torque (Nm) | 39.8 |
| Line current peak value (A) | 5.9 |
| DC link voltage (V) | 600 |
| Parameter | Symbol | Value |
|---|---|---|
| Stator outer diameter (mm) | 231.4 | |
| Stator inner diameter (mm) | 155 | |
| Stack length (mm) | 84 | |
| Air gap length (mm) | 1 | |
| Depth of stator slot (mm) | 22.5 | |
| Slot-opening width (mm) | 9.06 | |
| Rotor outer diameter (mm) | 153 | |
| Shaft diameter (mm) | 111.8 | |
| Rotor disc thickness (mm) | 15.4 | |
| Gap between magnets (mm) | 5.59 | |
| No. of turns per coil | 80 | |
| Rated RMS current (A) | 4.1676 | |
| Phase resistance (Ω) | 0.03988 |
| Parameter | Symbol | Initial | Range |
|---|---|---|---|
| Magnet thickness (mm) | 4 | 2.5–5.5 | |
| Tooth-tang depth (mm) | 6.7 | 5.5–7.9 | |
| Core back width (mm) | 14.3 | 13–16 | |
| Tooth width (mm) | 26.51 | 21.17–31.78 | |
| Slot-opening ratio | 0.15 | 0.05–0.44 | |
| PM width to pole pitch ratio | 0.95 | 0.5–0.95 |
| Item | ||||||
|---|---|---|---|---|---|---|
| 0.1627 | 0.0372 | 0.1003 | 0.0134 | 0.6168 | 0.3269 | |
| 0.0160 | −0.0046 | −0.0044 | 0.0072 | 0.0259 | 0.0207 | |
| 0.0183 | −0.0020 | 0.0171 | 0.0145 | 0.0284 | 0.0280 | |
| 0.0107 | −0.0040 | 0.0916 | 0.0052 | 0.0263 | 0.0440 | |
| −0.1932 | 0.2932 | 0.2636 | 0.1579 | 0.0409 | 0.3139 | |
| 0.7379 | 0.4595 | 0.5943 | 0.0364 | 0.1651 | 0.6818 |
| Variable/Objective | Initial | Optimal |
|---|---|---|
| 4 | 5.2 | |
| 6.7 | 6.8 | |
| 14.3 | 15.7 | |
| 26.51 | 29.23 | |
| 0.15 | 0.21 | |
| 0.95 | 0.88 | |
| 42.7 Nm | 42.73 Nm | |
| 10.9 Nm | 1.59 Nm | |
| 64.77 W | 56 W | |
| 2.56 Nm | 0.78 Nm | |
| 2.53 W | 1.99 W |
| Initial Machine | Optimal Machine | ||||||||
|---|---|---|---|---|---|---|---|---|---|
| Output | Propulsion | Charging | Output | Propulsion | Charging | ||||
| JMAG | MEC | JMAG | MEC | JMAG | MEC | JMAG | MEC | ||
| 43 | 42.7 | 0 | 0 | 42.77 | 42.73 | 0 | 0 | ||
| 12.2 | 10.9 | 2.64 | 2.56 | 1.89 | 1.59 | 1 | 0.78 | ||
| 219.5 | 218 | 11.57 | 12.62 | 223 | 222 | 10.95 | 11.64 | ||
| 65.3 | 64.77 | 2.31 | 2.53 | 54.5 | 56 | 2.35 | 1.99 | ||
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Metwly, M.Y.; Hemeida, A.; Abdel-Khalik, A.S.; Hamad, M.S.; Ahmed, S. Design and Multi-Objective Optimization of a 12-Slot/10-Pole Integrated OBC Using Magnetic Equivalent Circuit Approach. Machines 2021, 9, 329. https://doi.org/10.3390/machines9120329
Metwly MY, Hemeida A, Abdel-Khalik AS, Hamad MS, Ahmed S. Design and Multi-Objective Optimization of a 12-Slot/10-Pole Integrated OBC Using Magnetic Equivalent Circuit Approach. Machines. 2021; 9(12):329. https://doi.org/10.3390/machines9120329
Chicago/Turabian StyleMetwly, Mohamed Y., Ahmed Hemeida, Ayman S. Abdel-Khalik, Mostafa S. Hamad, and Shehab Ahmed. 2021. "Design and Multi-Objective Optimization of a 12-Slot/10-Pole Integrated OBC Using Magnetic Equivalent Circuit Approach" Machines 9, no. 12: 329. https://doi.org/10.3390/machines9120329
APA StyleMetwly, M. Y., Hemeida, A., Abdel-Khalik, A. S., Hamad, M. S., & Ahmed, S. (2021). Design and Multi-Objective Optimization of a 12-Slot/10-Pole Integrated OBC Using Magnetic Equivalent Circuit Approach. Machines, 9(12), 329. https://doi.org/10.3390/machines9120329