Rotor Dynamic Characteristics Supported by Multi-Pad Bump Foil Gas Bearings



Abstract
1. Introduction
2. Methods
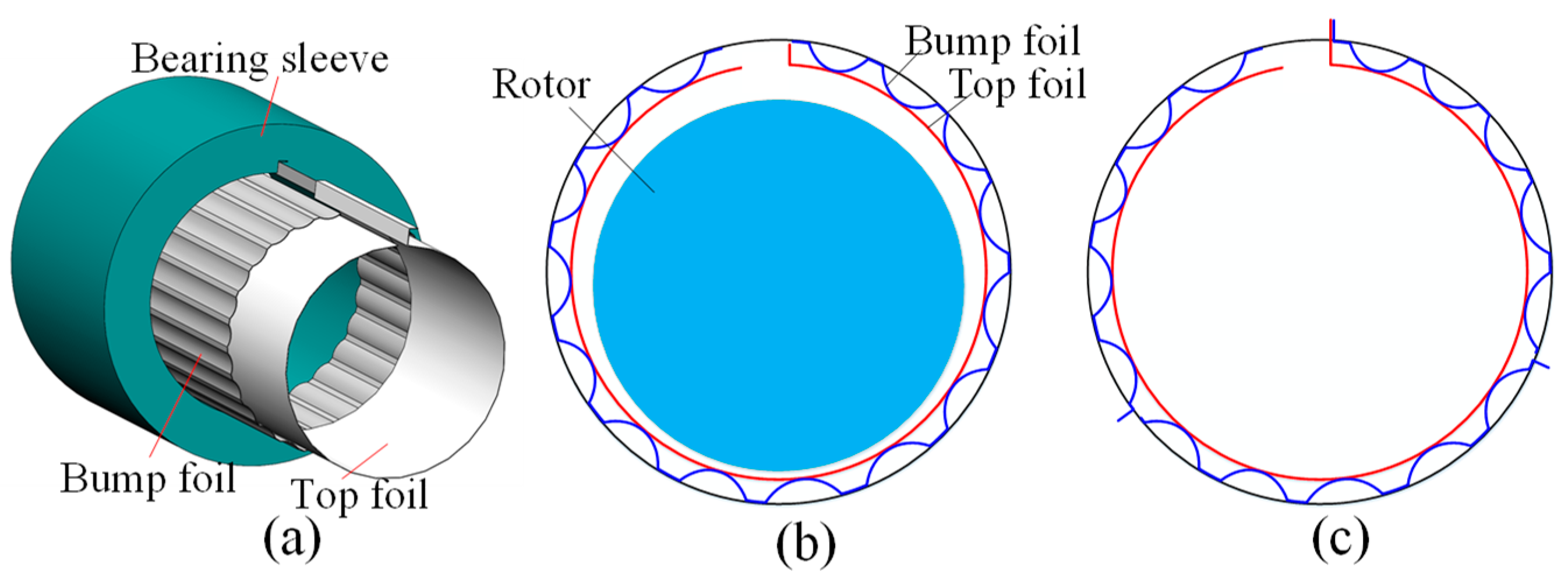
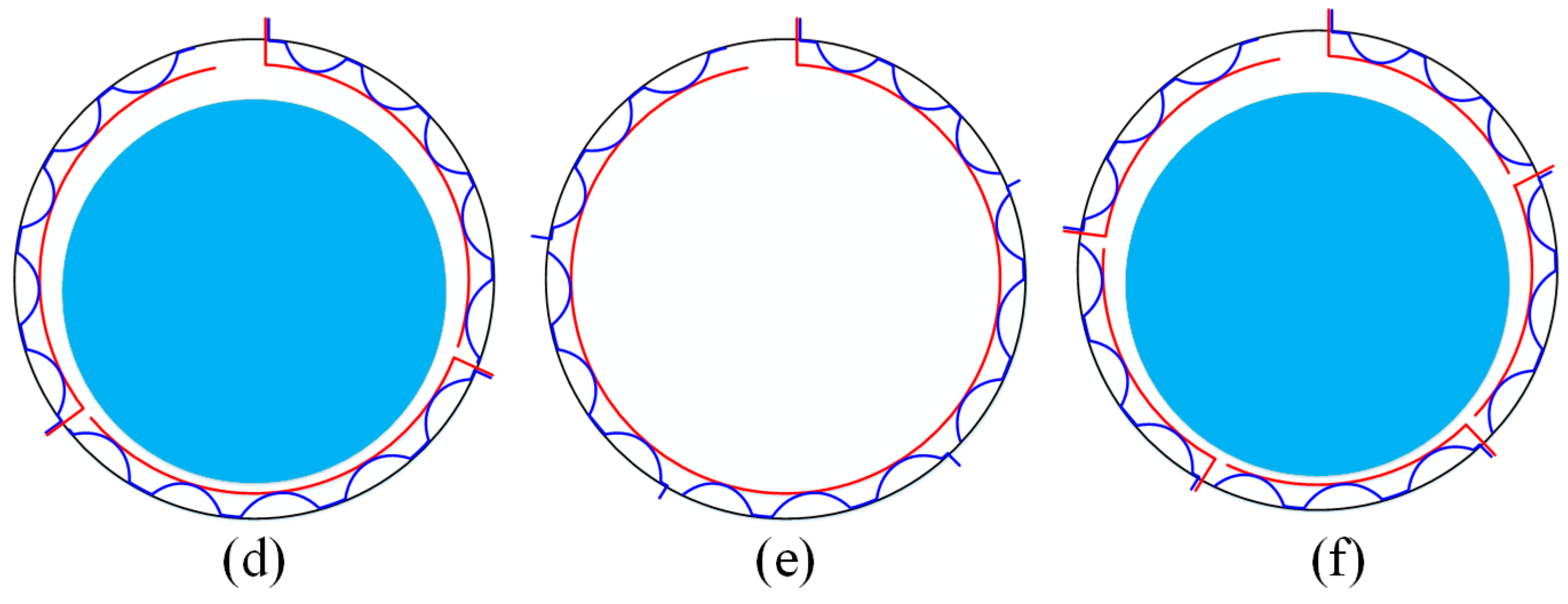
2.1. Foil Structures of Multi-Pad BFGB
2.2. Finite Element Model
2.3. The Internal Contact Constraints
2.4. Algorithm for Calculating Foil Deformation Considering Frictional Contacts
- (1)
- Global stiffness matrix construction
- (2)
- Contact constraint tangent matrix integration
- (3)
- Intelligent contact state determination
- (4)
- Convergence control
2.5. Gas Film Pressure Governing Equation
2.6. Multi-Field Coupled Model of Rotor–Bearing System
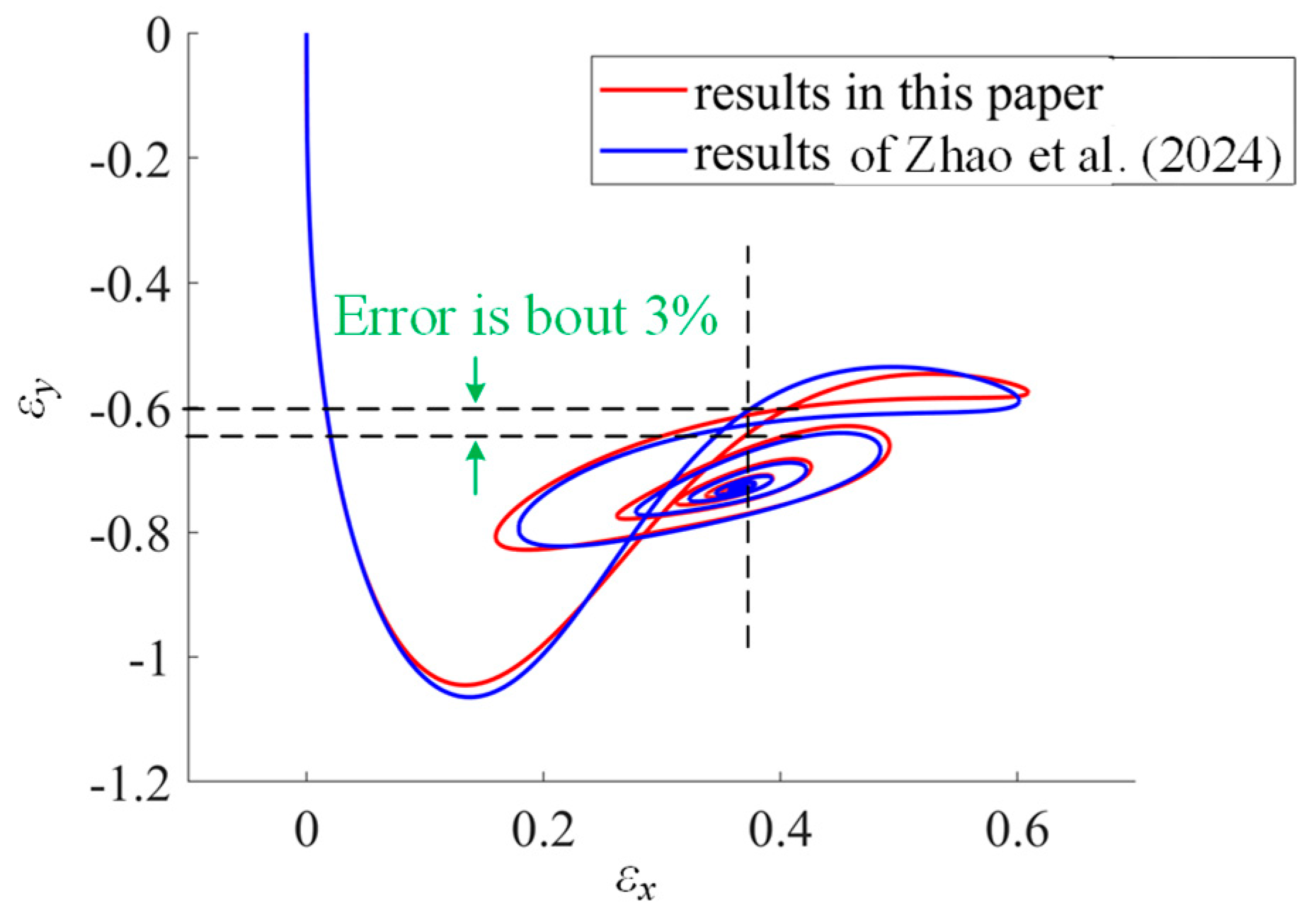
3. Model Validations
4. Results and Discussions
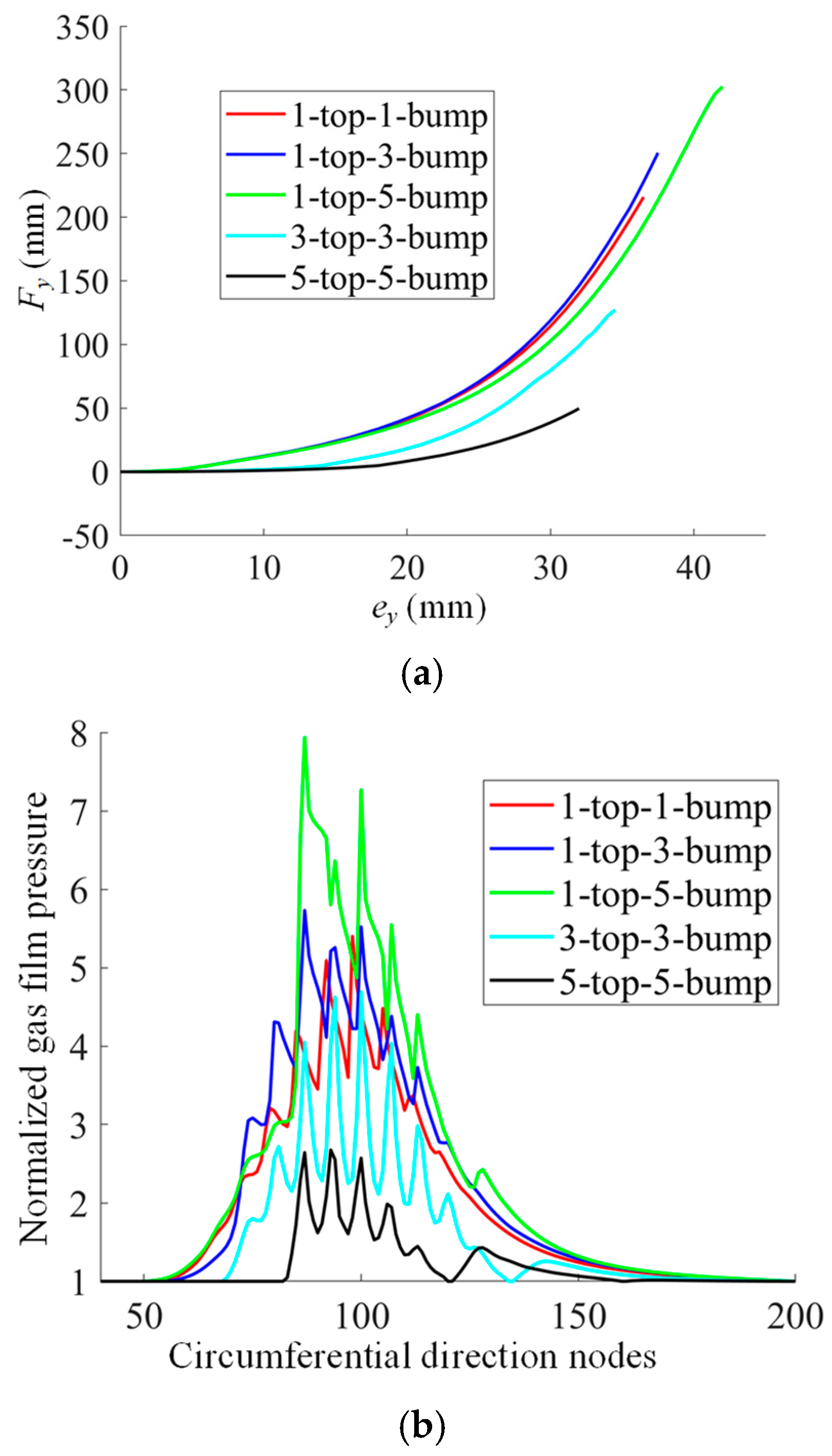
4.1. Static Performance Analysis of MP-BFGBs
4.2. Dynamic Performance Analysis of MP-BFGBs
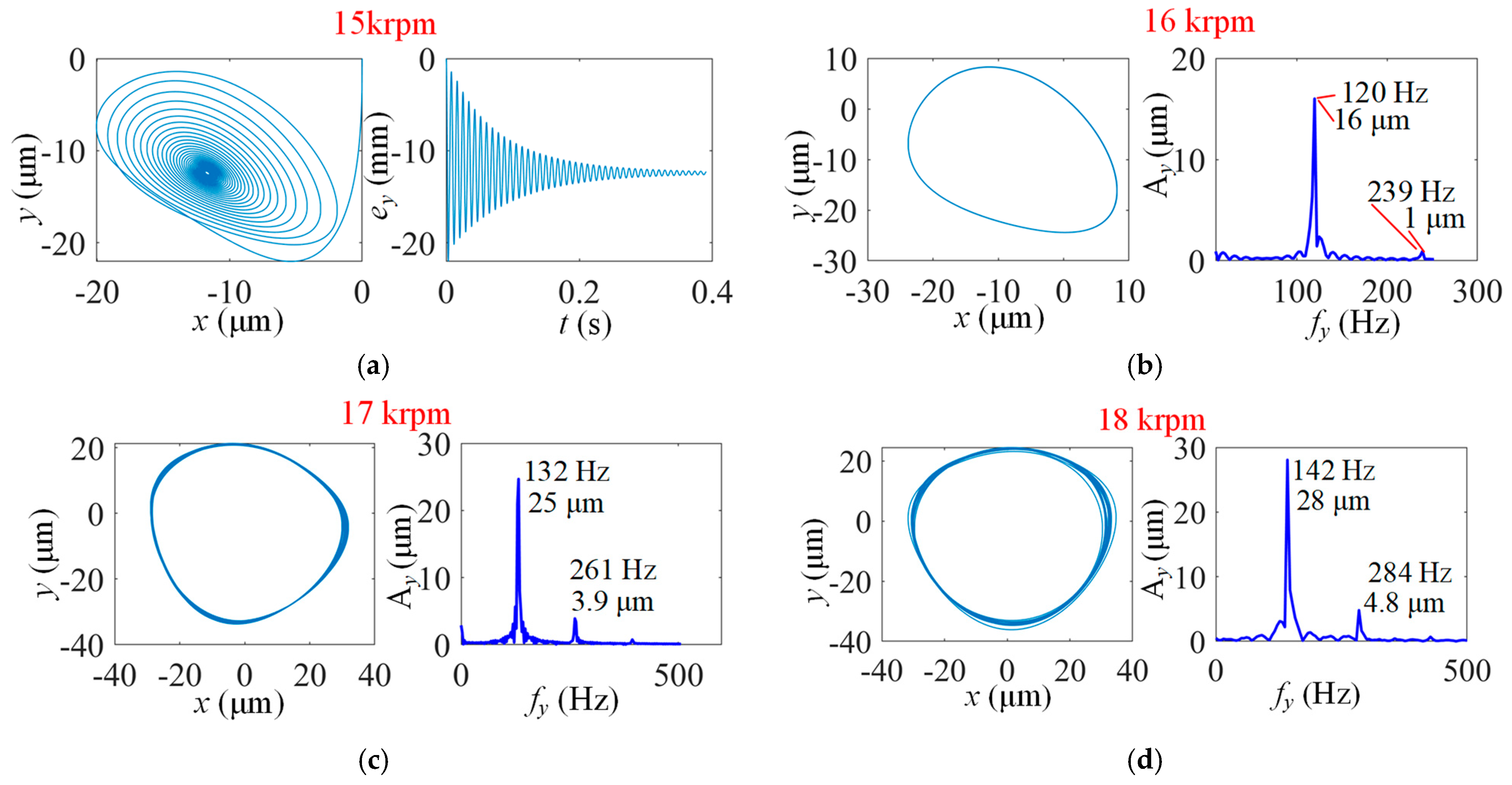
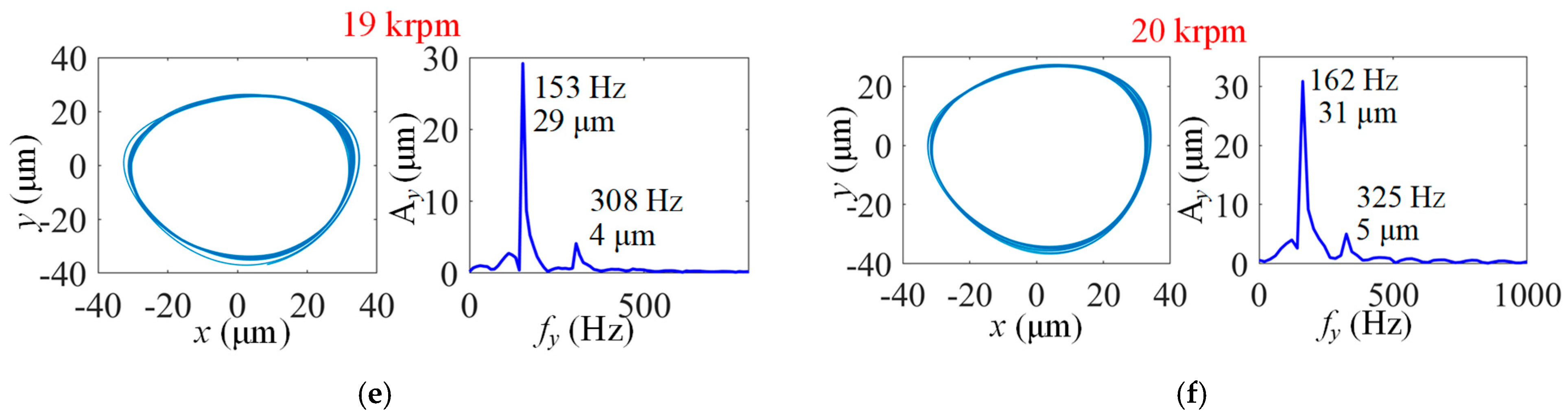
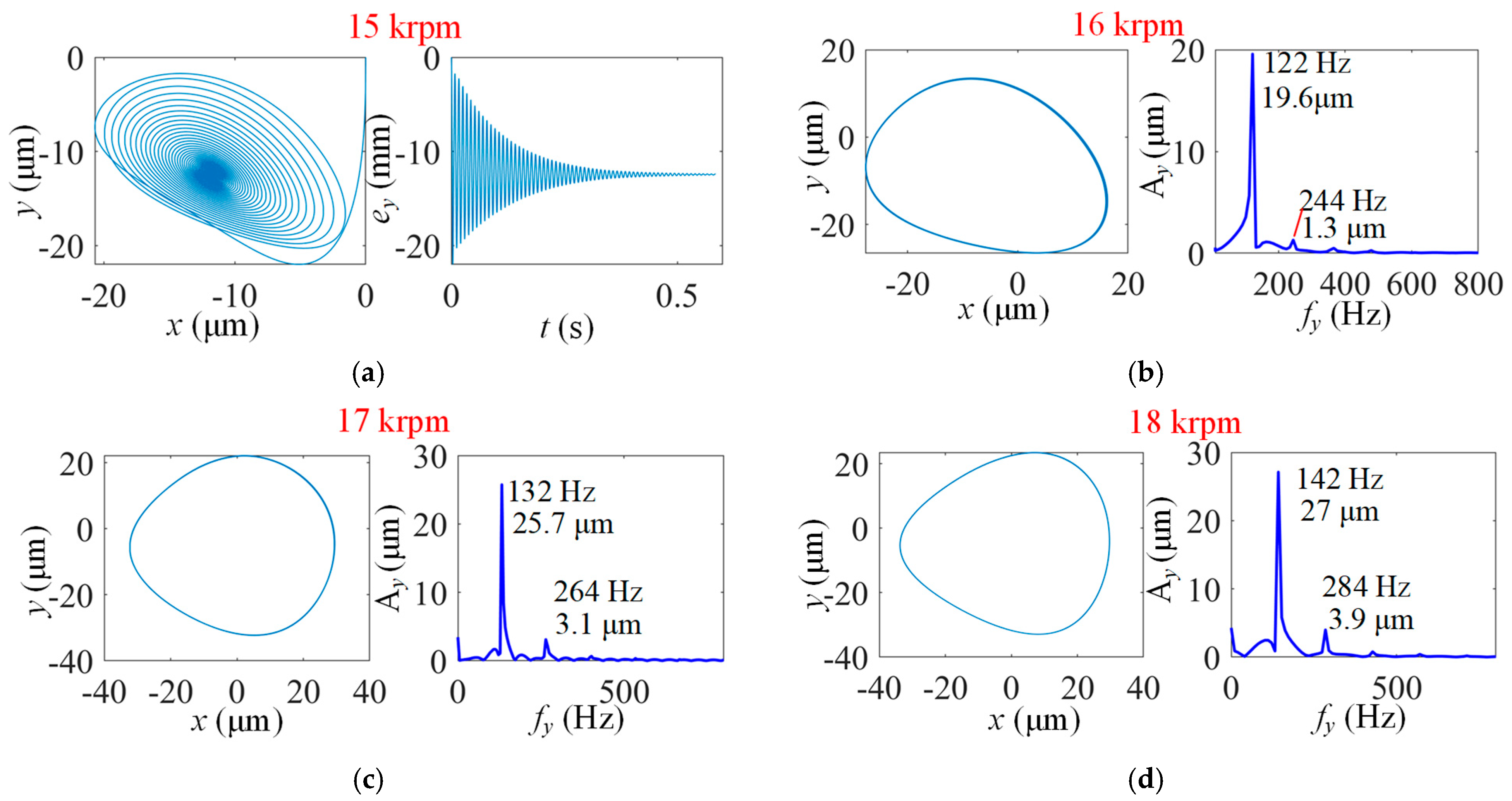
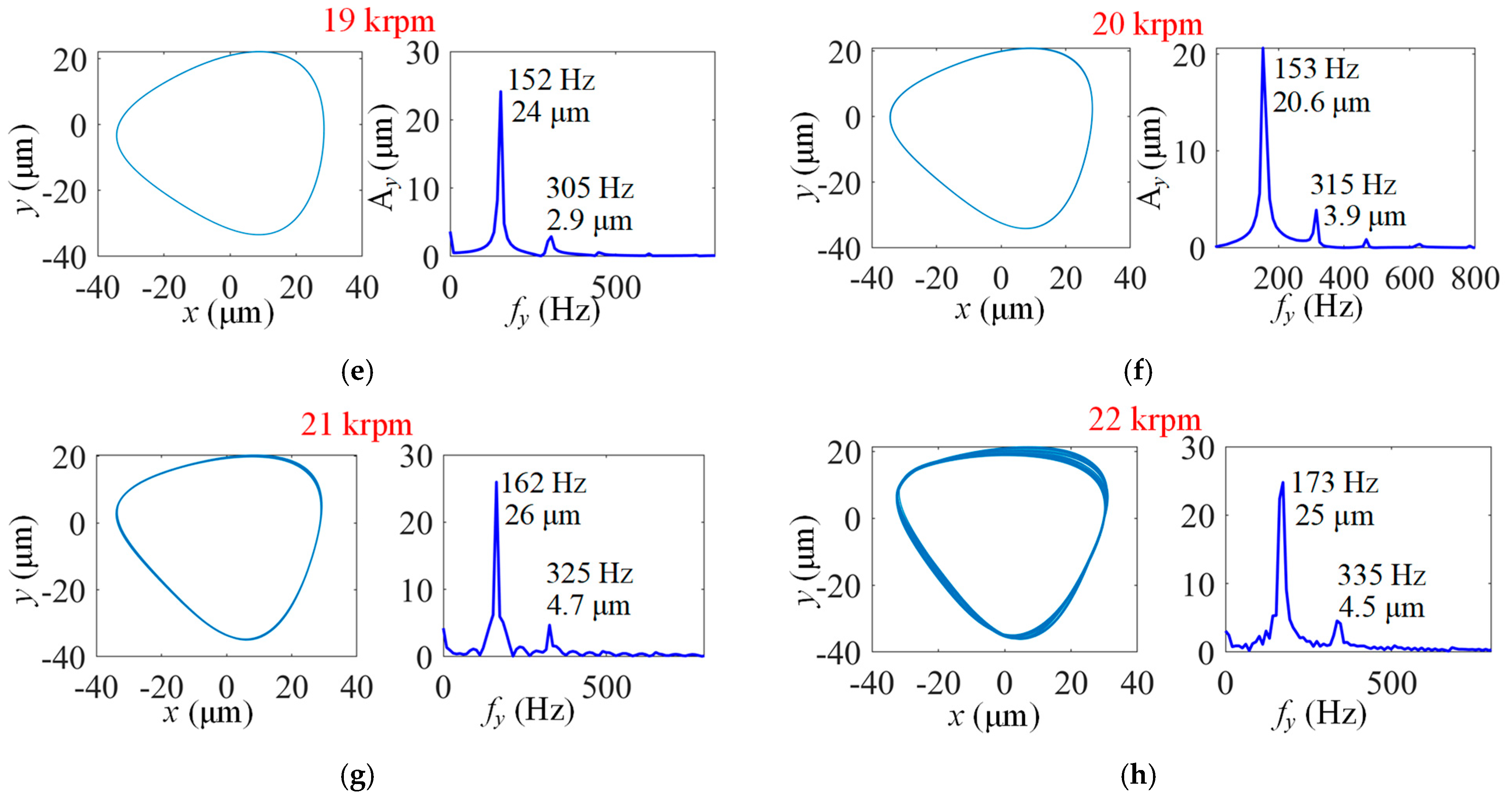
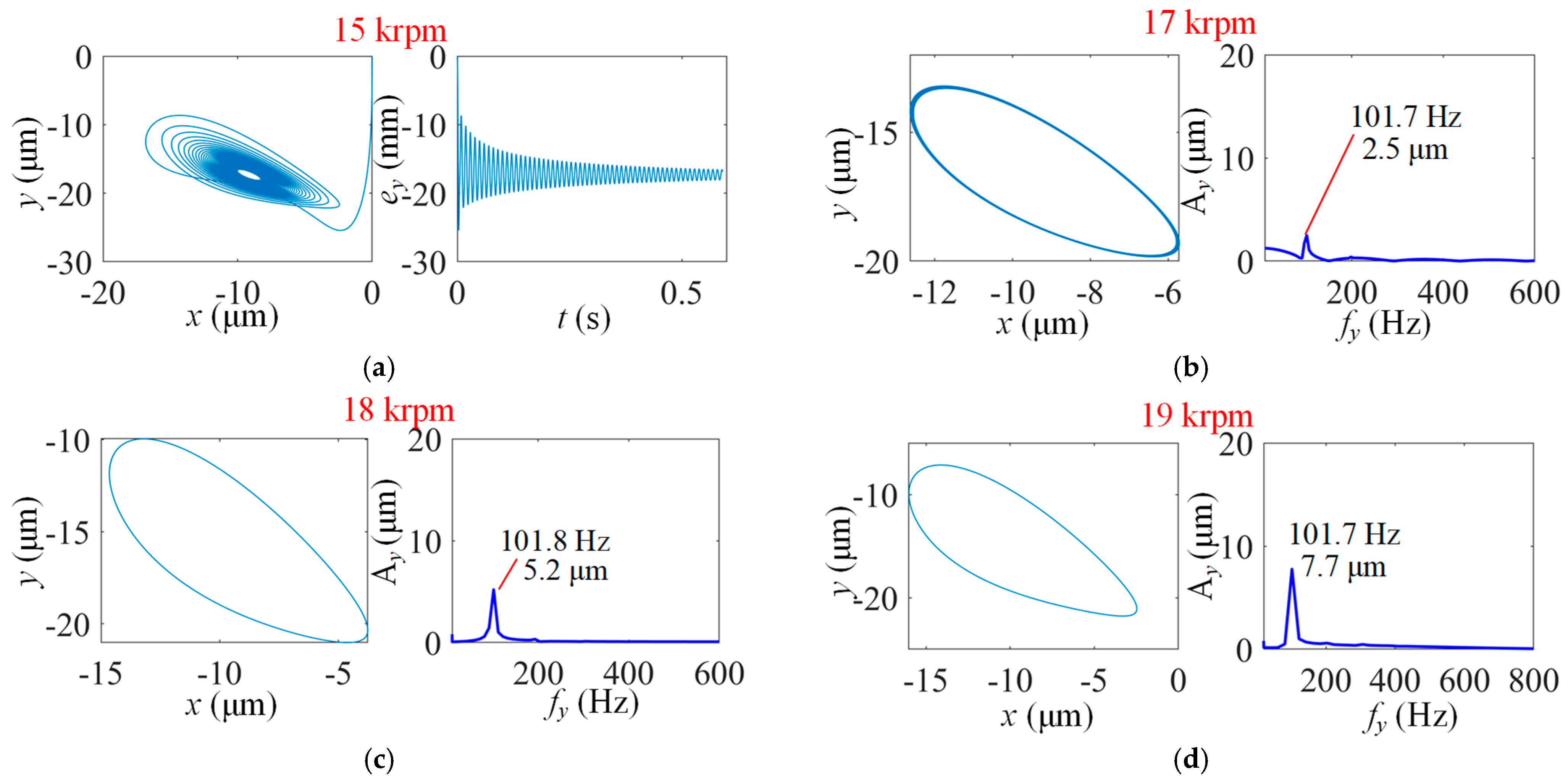
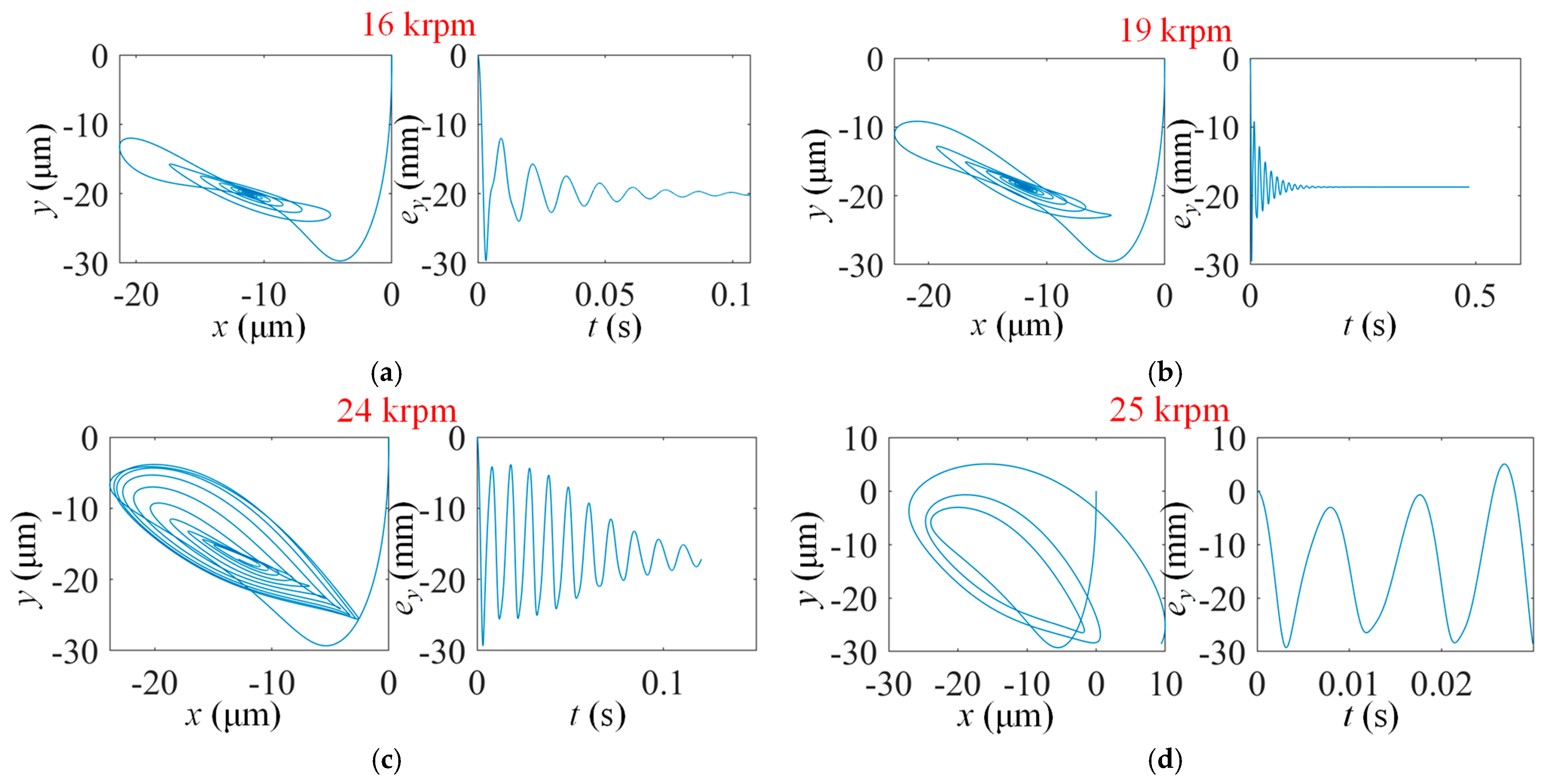
4.2.1. Self-Excitation Analysis of Rotor–Bearing System
- (1)
- Results for MP-BFGB with one top foil pad and one bump foil pad
- (2)
- Results for MP-BFGB with one top foil pad and three bump foil pads
- (3)
- Results for MP-BFGB with one top foil pad and five bump foil pads
- (4)
- Results for MP-BFGB with three top foil pads and three bump foil pads
- (5)
- Results for MP-BFGB with five top foil pads and five bump foil pads
- (6)
- Analyses and discussions
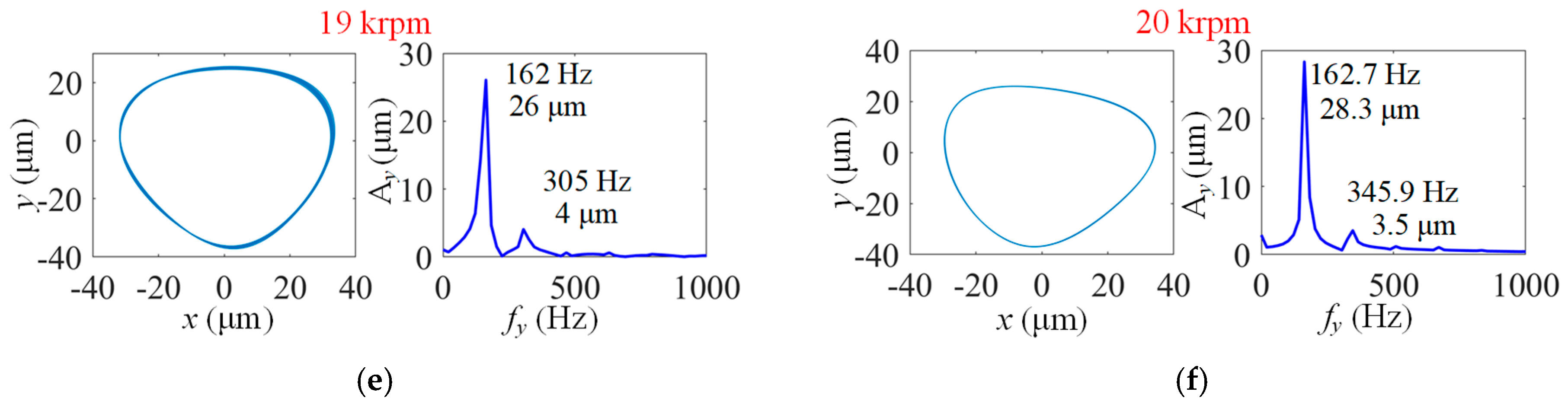
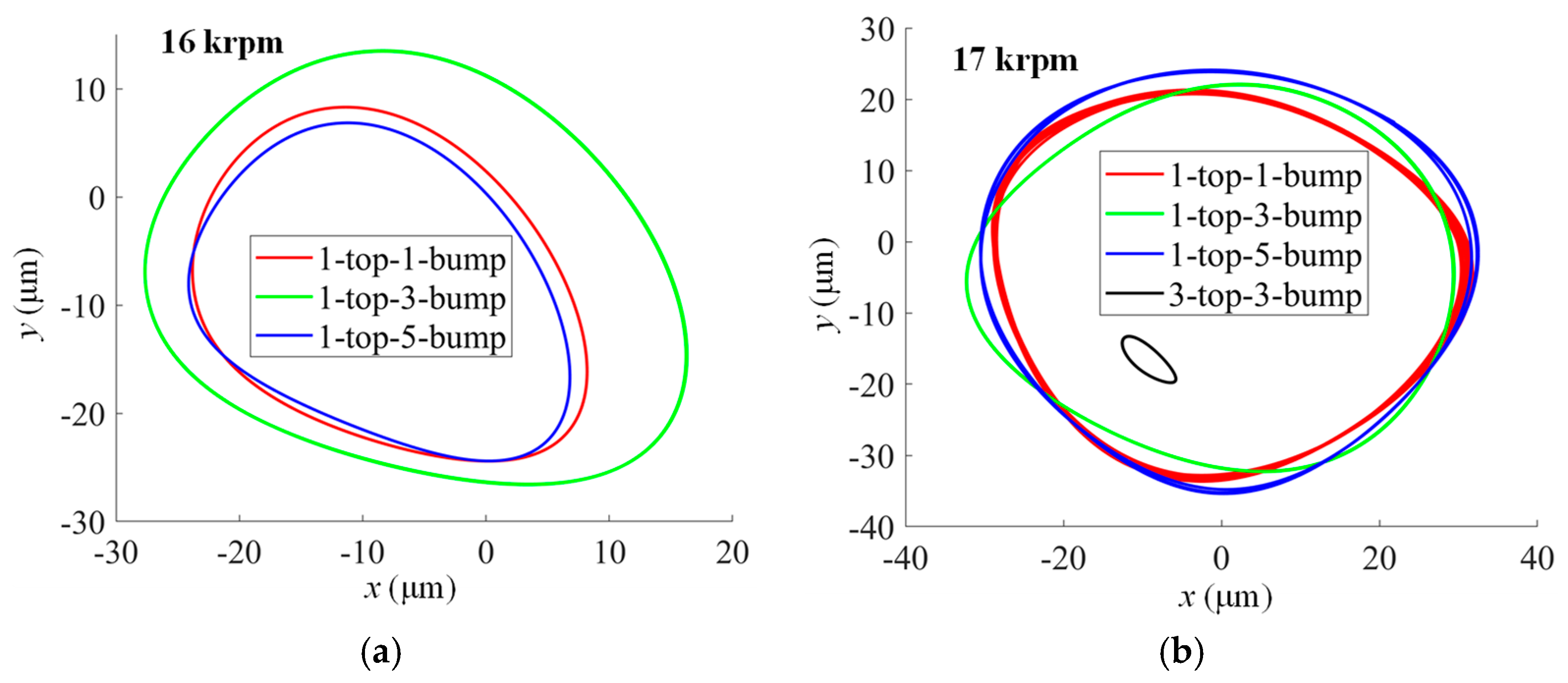
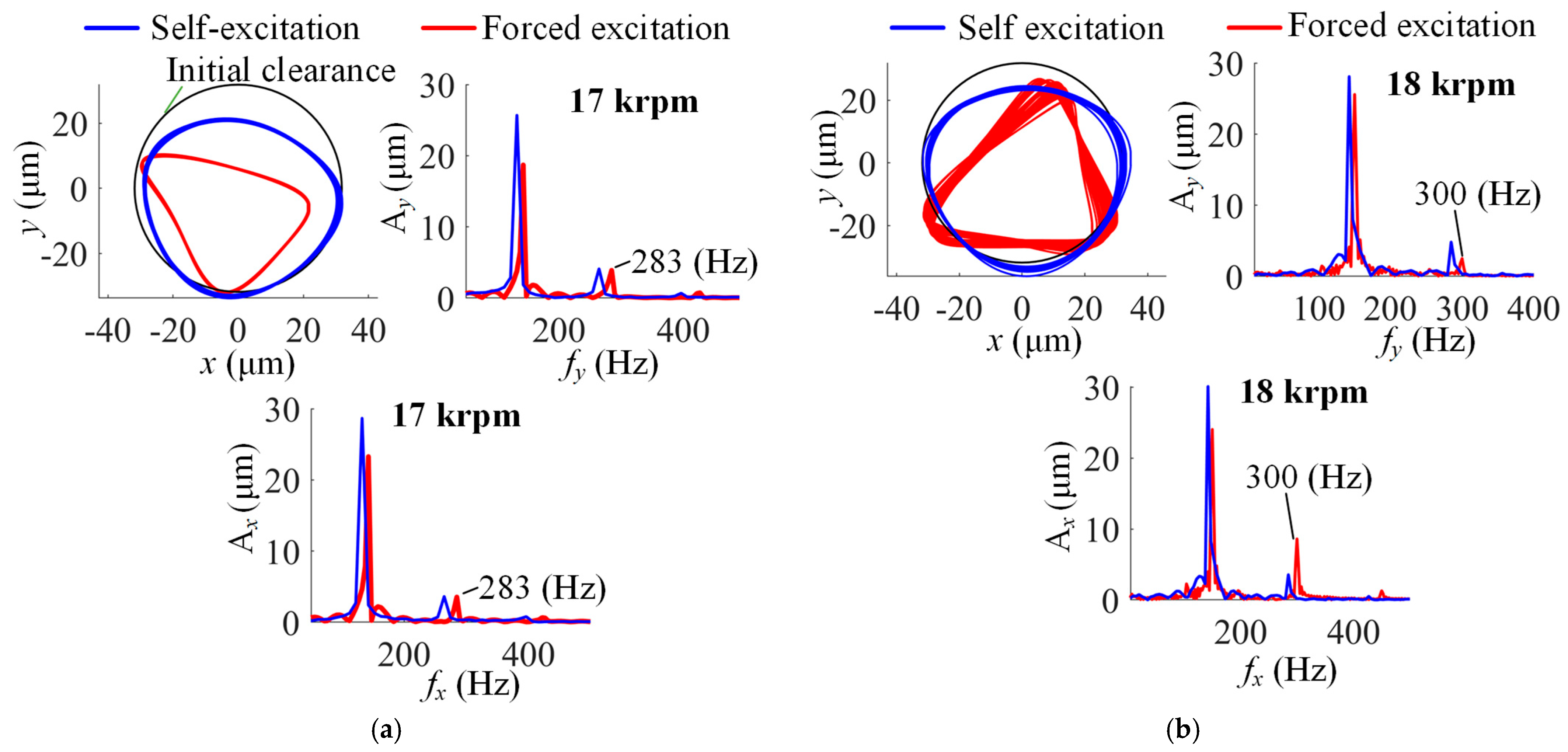
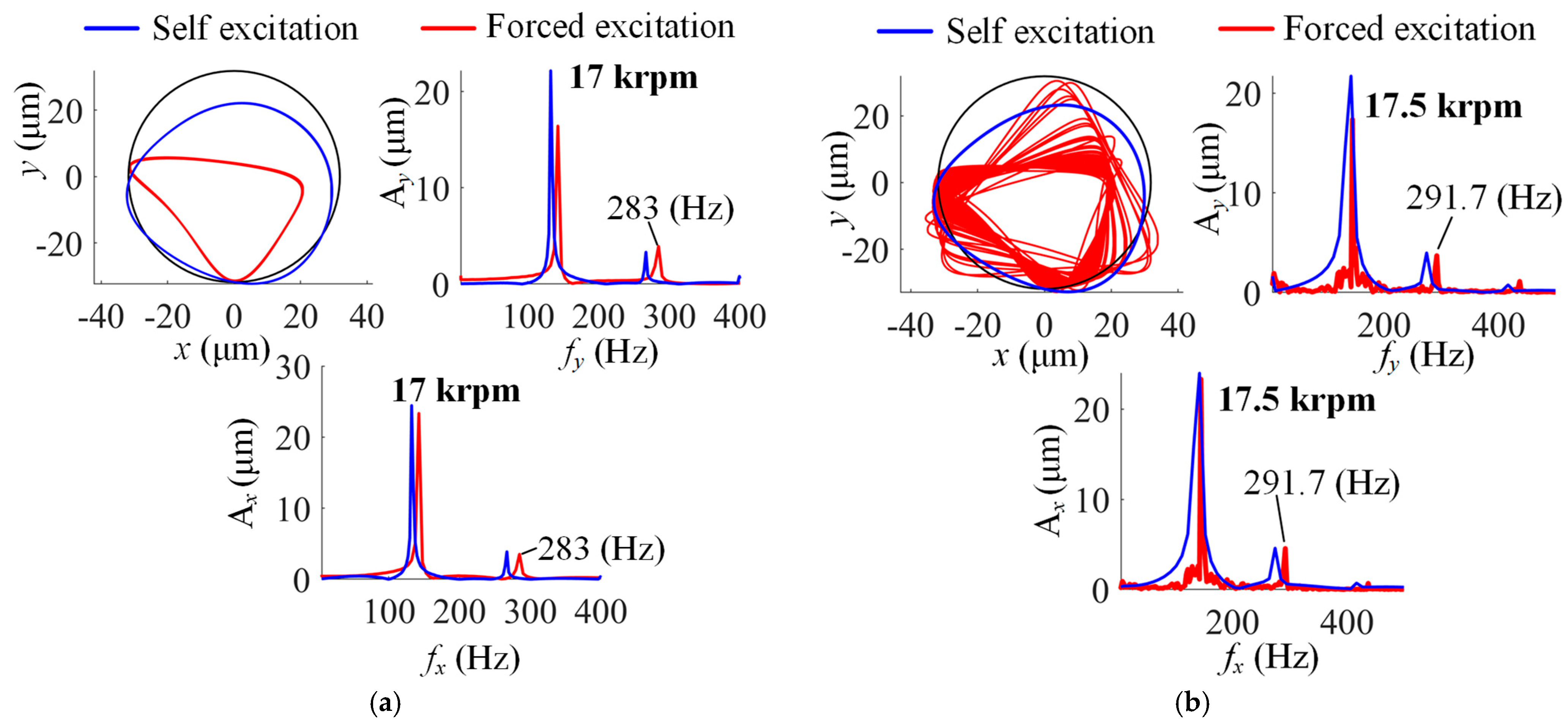
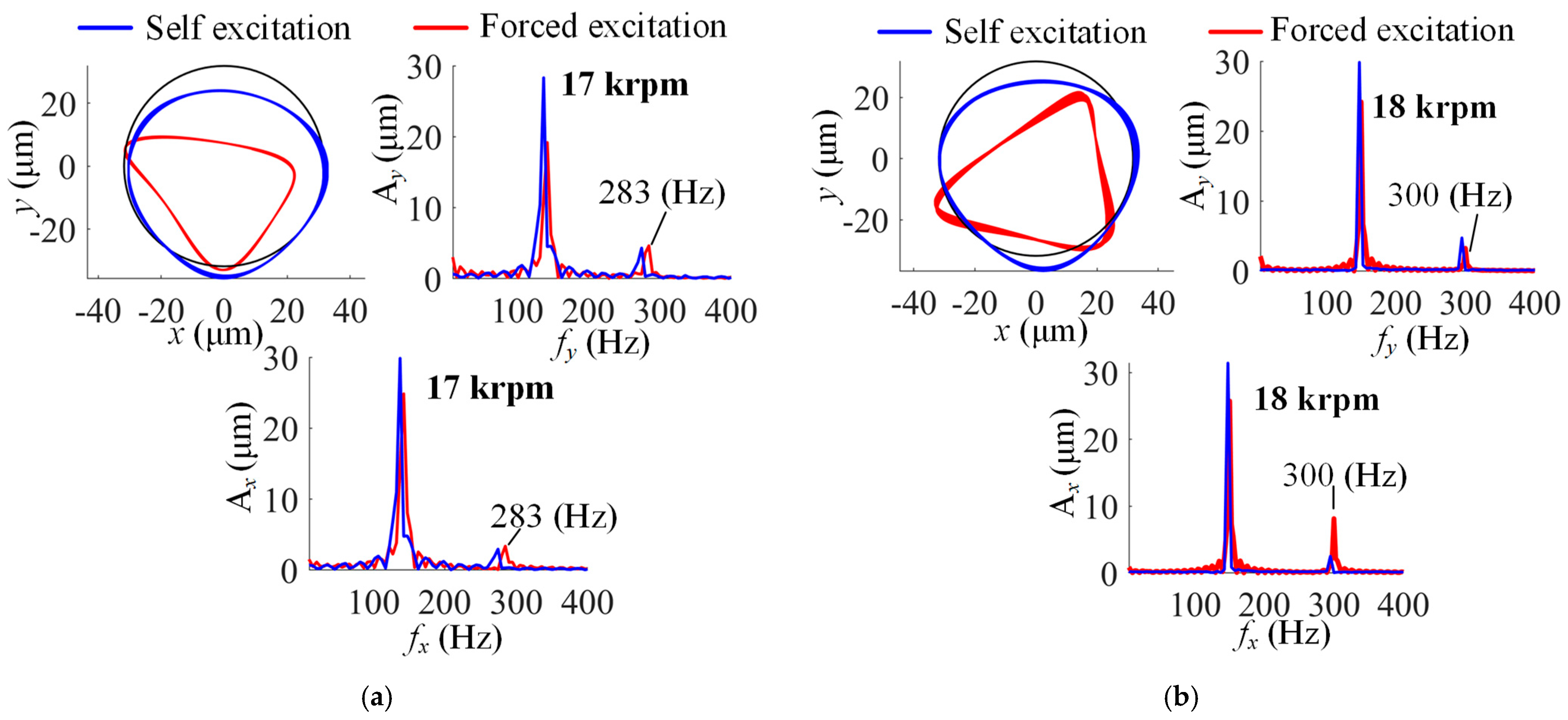
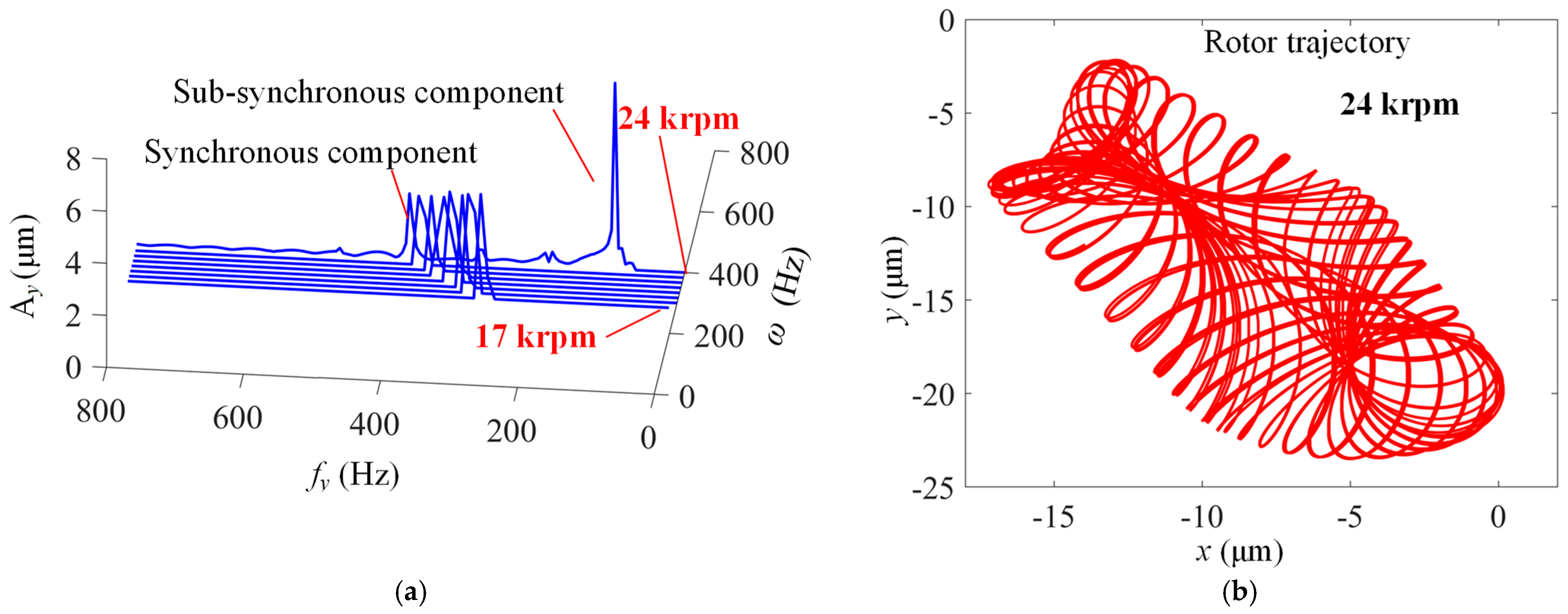
4.2.2. Rotor Forced Excitation Responses
- (1)
- Results for MP-BFGB with one top foil pad and one bump foil pad
- (2)
- Results for MP-BFGB with one top foil pad and three bump foil pads
- (3)
- Results for MP-BFGB with one top foil pad and five bump foil pads
- (4)
- Results for MP-BFGB with three top foil pads and three bump foil pads
- (5)
- Results for MP-BFGB with five top foil pads and five bump foil pads
5. Conclusions
- (1)
- Bearings with one top foil have significantly higher load capacities than those with three or five top foil pads. The load capacity of the MP-BFGBs and the gas film stiffness both decrease as the number of top foil pads increases.
- (2)
- Rotors are more likely to experience sub-synchronous vibrations when supported by a bearing with one top foil. That is, higher gas film stiffness more easily causes sub-synchronous vibration.
- (3)
- Among bearings with one top foil pad, structures with three bump foils result in lower sub-synchronous amplitudes at higher rotor speeds.
- (4)
- The bearing with five top foils and five bump foils allows the rotor to reach the highest critical stability speed under both self-excitation and forced excitation conditions.
- (5)
- Considering the forced excitation lowers the maximum rotor speed for the one top foil bearing but raises the critical speed for stability for bearings with three and five top foils.
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Nomenclature
| Bbs, Bms | Bending and stretching strain matrices of the curve beam element |
| Cini | Bearing radial clearance (m) |
| D | Rotor diameter (m) |
| e | Rotor eccentricity (m) |
| εt | Penalty factor in the tangent direction |
| E | Elastic modulus of the foil material (N/m2) |
| Fx, Fy | Bearing reaction forces in the x and y directions (N) |
| Fg | Aerodynamic force vector |
| , | Normal and tangent contact gaps between the bump foil and top foil at the kth load step (m) |
| , | Normal and tangent contact gaps between the bump foil and bearing sleeve at the kth load step (m) |
| , | General contact force vectors of the different types of contact constraints |
| , | Tangent contact matrices of the different types of contact constraints |
| , | Stiffness matrices of the curve beam element of the top foil and bump foil, respectively |
| Bearing width (m) | |
| Global mass matrix of the foil structures | |
| les, lew | Arc length and axial width of the curve beam element (m) |
| , | Interpolating functions of the radial and tangent displacements of the curve beam element |
| Factor indicating the sliding direction of the contact node pair | |
| Displacement vector of the curve beam element | |
| r | Curvature radius of the curve beam element (m) |
| Rtop, Rb, Rlink | Curvature radius of the top foil, bump foil, and link structure between adjacent bumps (m) |
| R | Rotor radius (m) |
| s | Circumferential coordinates of the curve beam element |
| t | Thickness of the curve beam element (m) |
| Δt | Time interval for calculating transient rotor responses (s) |
| w, v | Radial and tangential displacements of the curve beam element (m) |
| ω | Rotor rotating speed (rad·s−1) |
| Global displacement vector of the foil structures | |
| μ | Friction coefficient between foil leaves |
| μa | Gas viscosity (Pa·s) |
| Iteration factor of the Wilson-θ method | |
| Nodal rotational angle of the curve beam element (rad) | |
| Lagrange multiplier or contact force in the normal direction | |
| Foil deformation distribution | |
| ϕ | Rotor attitude angle (rad) |
| Bearing number | |
| Contact energy per contact node pair | |
| Total potential energy stemming from both elastic strain and contact constraints |
References
- DellaCorte, C.; Valco, M.J. Load Capacity Estimation of Foil Air Journal Bearings for Oil-Free Turbomachinery Applications. Tribol. Trans. 2000, 43, 795–801. [Google Scholar] [CrossRef]
- Agrawal, G.L. Foil Air/Gas Bearing Technology—An Overview. In Proceedings of the ASME International Gas Turbine & Aeroengine Congress & Exhibition, Orlando, FL, USA, 2–5 June 1997; American Society of Mechanical Engineers: New York, NY, USA, 1997. [Google Scholar]
- Heshmat, H. Advancements in the Performance of Aerodynamic Foil Journal Bearings: High Speed and Load Capability. J. Tribol. 1994, 116, 287–294. [Google Scholar] [CrossRef]
- DellaCorte, C.; Lukaszewicz, V.; Valco, M.J.; Radil, K.C.; Heshmat, H. Performance and Durability of High Temperature Foil Air Bearings for Oil-Free Turbomachinery. Tribol. Trans. 2000, 51, 665–671. [Google Scholar] [CrossRef]
- Ryu, K.; San Andrés, L. On the Failure of a Gas Foil Bearing: High Temperature Operation Without Cooling Flow. In Proceedings of the ASME Turbo Expo 2013: Turbine Technical Conference and Exposition. Volume 7A: Structures and Dynamics, San Antonio, TX, USA, 3–7 June 2013; p. V07AT29A006. [Google Scholar]
- DellaCorte, C.; Edmonds, B.J. NASA PS400: A New High Temperature Solid Lubricant Coating for High Temperature Wear Applications; NASA/TM-2009-215678; NASA: Washington, DC, USA, 2009.
- San Andrés, L.; Kim, T.H. Thermohydrodynamic Analysis of Bump Type Gas Foil Bearings: A Model Anchored to Test Data. J. Eng. Gas Turbines Power 2008, 130, 042504. [Google Scholar] [CrossRef]
- Bonello, P.; Pham, H.M. The efficient computation of the nonlinear dynamic response of a foil–air bearing rotor system. J. Sound Vib. 2014, 333, 3459–3478. [Google Scholar] [CrossRef]
- Bonello, P. The extraction of Campbell diagrams from the dynamical system representation of a foil-air bearing rotor model. Mech. Syst. Signal Process. 2019, 129, 502–530. [Google Scholar] [CrossRef]
- Bonello, P. The effects of air film pressure constraints and top foil detachment on the static equilibrium, stability and modal characteristics of a foil-air bearing rotor model. J. Sound Vib. 2020, 485, 115590. [Google Scholar] [CrossRef]
- Bonello, P.; Pourashraf, T. A comparison of modal analyses of foil-air bearing rotor systems using two alternative linearisation methods. Mech. Syst. Signal Process. 2022, 170, 108714. [Google Scholar] [CrossRef]
- Andrés, L.; Rubio, D.; Kim, T. Rotordynamic Performance of a Rotor Supported on Bump Type Foil Gas Bearings: Experiments and Predictions. J. Eng. Gas Turbines Power 2006, 129, 850–857. [Google Scholar] [CrossRef]
- Luis San Andrés Kim, T.H. Forced nonlinear response of gas foil bearing supported rotors. Tribol. Int. 2008, 41, 704–715. [Google Scholar]
- Balducchi, F.; Arghir, M.; Gauthier, R. Experimental Analysis of the Unbalance Response of Rigid Rotors Supported on Aerodynamic Foil Bearings. J. Vib. Acoust. 2015, 137, 061014. [Google Scholar] [CrossRef]
- Guo, Z.; Peng, L.; Feng, K.; Liu, W. Measurement and prediction of nonlinear dynamics of a gas foil bearing supported rigid rotor system. Measurement 2018, 121, 205–217. [Google Scholar] [CrossRef]
- Guo, Z.; Feng, K.; Liu, T.; Lyu, P.; Zhang, T. Nonlinear dynamic analysis of rigid rotor supported by gas foil bearings: Effects of gas film and foil structure on subsynchronous vibrations. Mech. Syst. Signal Process. 2018, 107, 549–566. [Google Scholar] [CrossRef]
- Lee, D.H.; Kim, Y.C.; Kim, K.W. The Dynamic Performance Analysis of Foil Journal Bearings Considering Coulomb Friction: Rotating Unbalance Response. Tribol. Trans. 2009, 52, 146–156. [Google Scholar] [CrossRef]
- von Osmanski, S.; Larsen, J.S.; Santos, I.F. A fully coupled air foil bearing model considering friction–Theory and experiment. J. Sound Vib. 2017, 400, 660–679. [Google Scholar] [CrossRef]
- Leister, T.; Baum, C.; Seemann, W. On the Importance of Frictional Energy Dissipation in the Prevention of Undesirable Self-Excited Vibrations in Gas Foil Bearing Rotor Systems. Tech. Mech.-Eur. J. Eng. Mech. 2017, 37, 280–290. [Google Scholar]
- Bin Hassan, M.F.; Bonello, P. A new modal-based approach for modelling the bump foil structure in the simultaneous solution of foil-air bearing rotor dynamic problems. J. Sound Vib. 2017, 396, 255–273. [Google Scholar] [CrossRef]
- Hoffmann, R.; Liebich, R. Characterisation and calculation of nonlinear vibrations in gas foil bearing systems–An experimental and numerical investigation. J. Sound Vib. 2018, 412, 389–409. [Google Scholar] [CrossRef]
- Li, C.; Du, J.; Li, J.; Xu, Z. Linear stability and nonlinear rotor responses of the gas foil bearing with multiple sliding beams. Proc. Inst. Mech. Eng. Part C J. Mech. Eng. Sci. 2023, 237, 5247–5272. [Google Scholar] [CrossRef]
- Roger Ku, C.-P.; Heshmat, H. Compliant Foil Bearing Structural Stiffness Analysis: Part I-Theoretical Model Including Strip and Variable Bump Foil Geometry. J. Tribol. 1992, 114, 394–400. [Google Scholar]
- Le Lez, S.; Arghir, M.; Frene, J. A new bump-type foil bearing structure analytical model. J. Eng. Gas Turbines Power 2007, 129, 1047–1057. [Google Scholar] [CrossRef]
- Feng, K.; Kaneko, S. Analytical model of bump-type foil bearings using a link-spring structure and a finite-element shell model. J. Tribol. 2010, 132, 021706. [Google Scholar] [CrossRef]
- Zhao, X.; Xiao, S. A Finite Element Model for Static Performance Analysis of Gas Foil Bearings Based on Frictional Contacts. Tribol. Trans. 2021, 64, 275–286. [Google Scholar] [CrossRef]
- Gu, Y.; Lan, X.; Ren, G.; Zhou, M. An efficient three-dimensional foil structure model for bump-type gas foil bearings considering friction. Friction 2021, 9, 1450–1463. [Google Scholar] [CrossRef]
- Li, C.; Li, J.; Xu, Z.; Zhao, X.; Du, J. Load carrying performance of the 2nd and 3rd generation journal bump foil bearings including two dimensional stiffness variations. Tribol. Int. 2023, 190, 109016. [Google Scholar] [CrossRef]
- Le Lez, S.; Arghir, M.; Frene, J. Nonlinear Numerical Prediction of Gas Foil Bearing Stability and Unbalanced Response. J. Eng. Gas Turbines Power 2009, 131, 012503. [Google Scholar] [CrossRef]
- Heshmat, H.; Shapiro, W.; Gray, S. Development of Foil Journal Bearings for High Load Capacity and High Speed Whirl Stability. ASME J. Lubr. Tech 1982, 104, 149–156. [Google Scholar] [CrossRef]
- Sim, K.; Lee, Y.B.; Kim, T.H. Effects of Mechanical Preload and Bearing Clearance on Rotordynamic Performance of Lobed Gas Foil Bearings for Oil-Free Turbochargers. Tribol. Trans. 2013, 56, 224–235. [Google Scholar] [CrossRef]
- Hoffmann, R.; Liebich, R. Experimental and numerical analysis of the dynamic behavior of a foil bearing structure affected by metal shims. Tribol. Int. 2017, 115, 378–388. [Google Scholar] [CrossRef]
- Li, C.; Du, J.; Zhu, J.; Yao, Y. Effects of structural parameters on the load carrying capacity of the multi-leaf gas foil journal bearing based on contact mechanics. Tribol. Int. 2018, 131, 318–331. [Google Scholar] [CrossRef]
- Li, C.; Du, J.; Yao, Y. Study of load carrying mechanism of a novel three-pad gas foil bearing with multiple sliding beams. Mech. Syst. Signal Process. 2020, 135, 106372. [Google Scholar] [CrossRef]
- Li, C.; Du, J.; Li, J.; Xu, Z. Investigations on the Frictional Hysteresis Effect of Multi-Leaf Journal Foil Bearing: Modeling, Predictions and Validations. Lubricants 2022, 10, 261. [Google Scholar] [CrossRef]
- Peng, Z.C.; Khonsari, M.M. Hydrodynamic analysis of compliant foil bearings with compressible air flow. J. Tribol. 2004, 126, 542–546. [Google Scholar] [CrossRef]
- Zhao, X.; Li, C.; Du, J.; Lu, Y. A nonlinear model for dynamic performance analysis of gas foil bearing-rotor system considering frictional contacts. Nonlinear Dyn. 2024, 112, 5975–5996. [Google Scholar] [CrossRef]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Bearing Parameters | Values |
|---|---|
| Rotor diameter, D/mm | 38.1, (38.1) |
| Bearing width, L/mm | 38.1, (38.1) |
| Radial clearance, Cini/mm | 0.0318, (0.318) |
| Top foil thickness, tp/mm | 0.1, (0.1) |
| Bump foil thickness, tb/mm | 0.1, (0.1) |
| Bump height, hb/mm | 0.608, (0.508) |
| Bump pitch, sb/mm | 4.57, (4.02) |
| Bump half-length, lb/mm | 1.778, (1.51) |
| Rotor mass, Mr/kg | 3 (3) |
| Eccentricity of rotor unbalance mass, ub/µm | 0 (2) |
| Time interval of transient simulations, Δt/s | 2 × 10−6 (2 × 10−6) |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhao, L.; Hu, H.; Li, C.; Zhao, J. Rotor Dynamic Characteristics Supported by Multi-Pad Bump Foil Gas Bearings. Lubricants 2025, 13, 127. https://doi.org/10.3390/lubricants13030127
Zhao L, Hu H, Li C, Zhao J. Rotor Dynamic Characteristics Supported by Multi-Pad Bump Foil Gas Bearings. Lubricants. 2025; 13(3):127. https://doi.org/10.3390/lubricants13030127
Chicago/Turabian StyleZhao, Lei, Hongyang Hu, Changlin Li, and Jingquan Zhao. 2025. "Rotor Dynamic Characteristics Supported by Multi-Pad Bump Foil Gas Bearings" Lubricants 13, no. 3: 127. https://doi.org/10.3390/lubricants13030127
APA StyleZhao, L., Hu, H., Li, C., & Zhao, J. (2025). Rotor Dynamic Characteristics Supported by Multi-Pad Bump Foil Gas Bearings. Lubricants, 13(3), 127. https://doi.org/10.3390/lubricants13030127