1. Introduction
In lubricated sliding contacts the separation of the two sliding surfaces is maintained by the internal fluid pressure of the lubricating film. In addition to the experimental investigation [
1,
2,
3,
4,
5], the simulation of lubricated contacts is an important tool for the design process of tribological systems for different applications [
6,
7,
8,
9,
10]. For the calculation of the hydrodynamic lubrication, the Reynolds equation is commonly used [
11]. This equation is obtained from the Navier-Stokes equations under additional assumptions due to thin-film-flow in lubricated sliding contacts, e.g., journal bearings. Used in the classical sense, the Reynolds equation takes into account only the macroscopic geometry for calculating pressure distribution and friction losses. Hydrodynamic effects because of the microscopic surface structure are not taken into account. This is valid as long as the roughness of the surfaces is small in relation to the gap height. Especially in the case that the nominal gap height
and the microstructural roughness
are of the same order and partial lubrication occurs (
for Gaussian height distribution), the surface topography affects the fluid flow significantly, which needs to be considered in calculating hydrodynamic effects [
12].
To take surface effects in fluid lubrication into account, two basic methods exist. For small contact areas, which generally occur in contra-form contacts (e.g., gear tooth contact,…), it is possible to directly incorporate measured microstructures in the hydrodynamic calculations, called direct coupling [
13,
14,
15]. For conform contacts, also referred to as large-area contacts, however, this procedure is not yet effectively feasible since a direct incorporation of the surface topography results in enormous computational effort. In this case, a so-called indirect coupling is used. By calculating the fluid flow in a small representative area of the rough lubricating gap, the effects of the surface structures can be investigated on a reduced scale but with reasonable computational effort. By incorporating the achieved results in the form of flow factors in the Reynolds equation, the effects on the fluid flow resulting from the micro topography can be considered.
The now common method for indirect coupling goes back to Patir and Cheng [
12,
16]. The authors solved the Reynolds equation on a small area of the rough lubricating gap. The micro flow calculated in this way is set into relation to the flow of a perfectly smooth lubricating gap with the same mean height, resulting in flow factors. Fluid flow includes two possible sources, namely pressure and shear driven flow, which is also considered within the theory of flow factors by the introduction of pressure flow factors and shear flow factors.
The investigations by Patir and Cheng were conducted with mathematically generated surfaces, due to the lack of available real surface topographies. The basic assumption of surface height distribution is crucial. Besides the investigated case of a Gaussian height distribution by Patir and Cheng, the authors of [
17] illustrated the effects of a different artificially generated surface which lead to deviant results. Nevertheless, flow factors from Patir and Cheng are the technical standard and also widely used in commercial simulation packages [
18]. With advancing technology regarding the 3D acquisition of surfaces, the application of Patir and Cheng’s method became practicable for real surfaces [
19,
20,
21]. In recent years, the method by Patir and Cheng has been adopted and expanded to be able to take effects like micro cavitation, elastic deformation, thermal effects and also solid contacts into account [
22,
23]. Lunde and Tonder [
24] discuss the validity of the boundary conditions chosen by Patir and Cheng. The authors of [
21,
25] present new methods for micro-macro indirect coupling.
However, the use of the Reynolds equation for the calculation of the flow through the micro-structured lubricating gap is limited, due to the chosen simplifications. When the surface profile shows strong height changes, which can cause velocity changes in height direction, as well as changes of the fluid impulse and micro turbulences, the Reynolds equation is no longer valid to describe the flow through the rough gap [
20,
26,
27,
28,
29,
30]. Recent works describe the idea of calculating the micro flow and subsequently the flow factors with the Navier-Stokes equations and implementing them in a Reynolds equation for the large-scale system [
31,
32]. By using the Navier-Stokes equations, flow processes in the fluid can be depicted in greater detail. This is fundamental to being able to investigate the effects of structured and textured surfaces [
33].
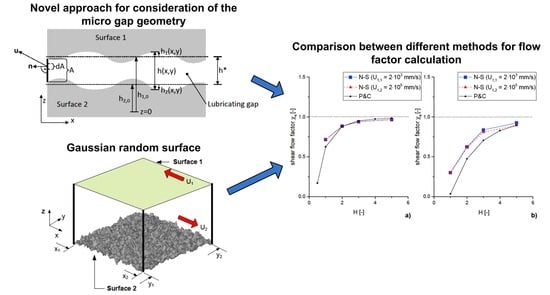
This article describes an approach for the calculation of flow factors using the Navier-Stokes equations. The presented method is designed for the use of a rough, three-dimensional lubrication gap. In contrast to mentioned references [
31,
32], which are subjected to the necessity of a smooth surface to be able to calculate the shear flow factor, the numerical approach is expanded by the possibility of a moving rough surface. With this novel method a deeper understanding of the effects of roughness and surface structures on the hydrodynamic lubricating performance is expected. The investigations in this article are performed with a mathematically generated surface in the theory presented by Patir and Cheng [
12,
16]. In this way, a comparison between the flow factors calculated by the Reynolds equation and the proposed method using the Navier-Stokes equations can be accomplished.
Since this is the first step in validating the described model, thermal effects, micro-cavitation and deformable geometry are not taken into account. Although they will increase computational effort considerably, these effects will be implemented in the future.
2. Mathematical Background
For the CFD simulation of the fluid flow in the rough lubrication gap, the Navier-Stokes equations [
34] are used. Simplifying assumptions are constant viscosity (
mm
/s) and absence of micro-cavitation. Because of the small dimensions of the gap, body forces are neglected. The equations are used in time-dependent, density-free formulation inside a three-dimensional domain with stationary reference frame. Moving surfaces, rough or smooth, act as fixed-velocity boundary conditions at the top and bottom of the computational domain. Pressure-induced elastic deformation is neglected, i.e., the bounding surfaces are rigid bodies moving at constant velocity with respect to the stationary frame. Consequently, the continuity equation can be written as
and the momentum equation as:
Boundary conditions for (
2) at the inlet and outlet are the common ones, as used by Patir and Cheng [
12,
16], see in detail
Section 3.2. To take micro turbulences into account, the flow simulation of the rough gap was obtained by a Large Eddy Simulation (LES) [
35,
36]. As width scale for the LES-filter a cube-root-volume-delta
was used, where
represents the volume of the respective cell of the numerical mesh [
37].
As subgrid turbulence model, a one-equation-k-model was used [
38].
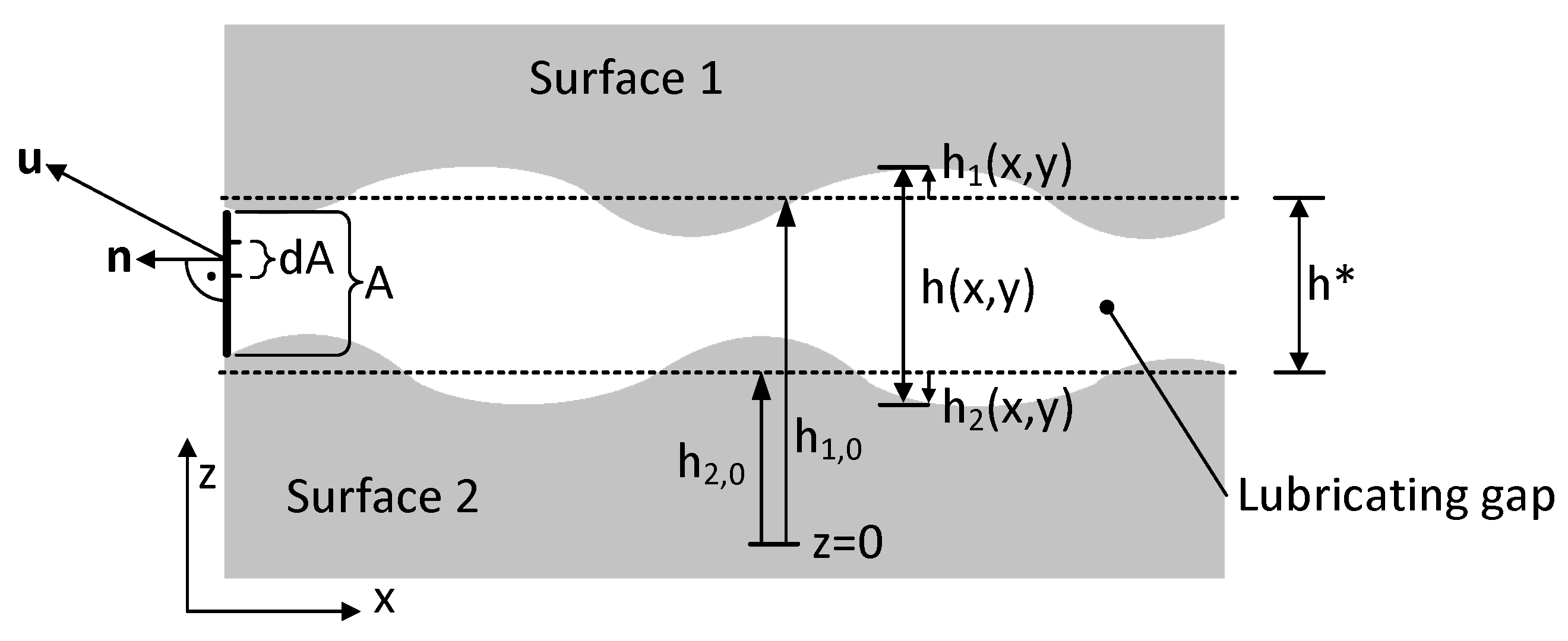
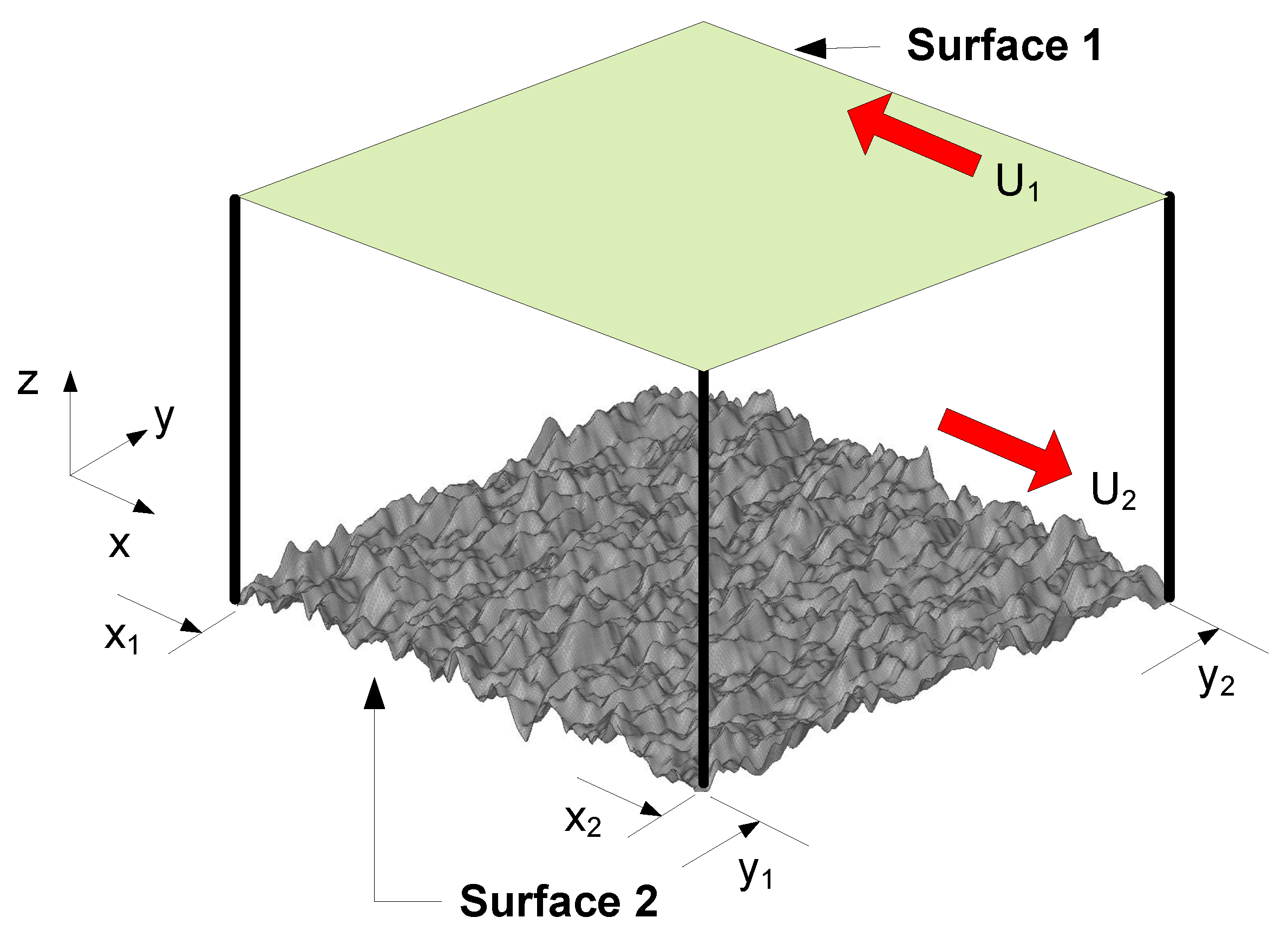
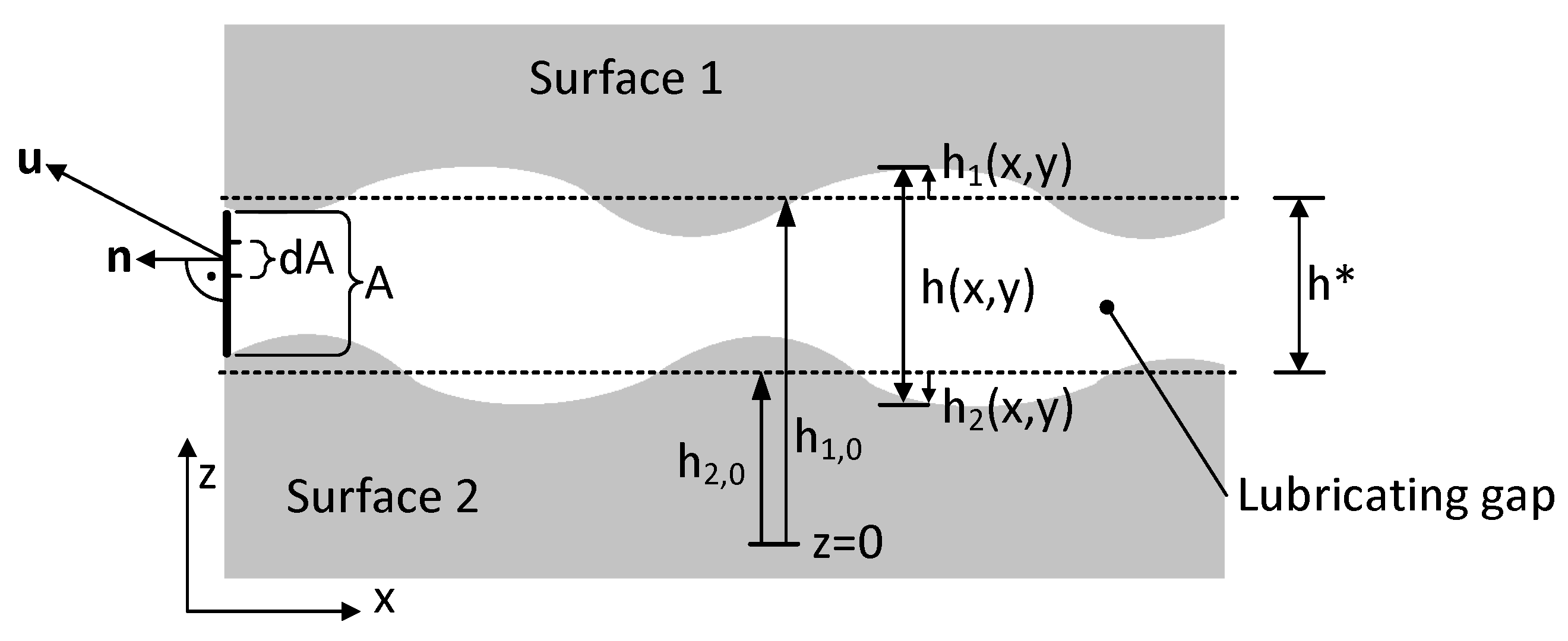
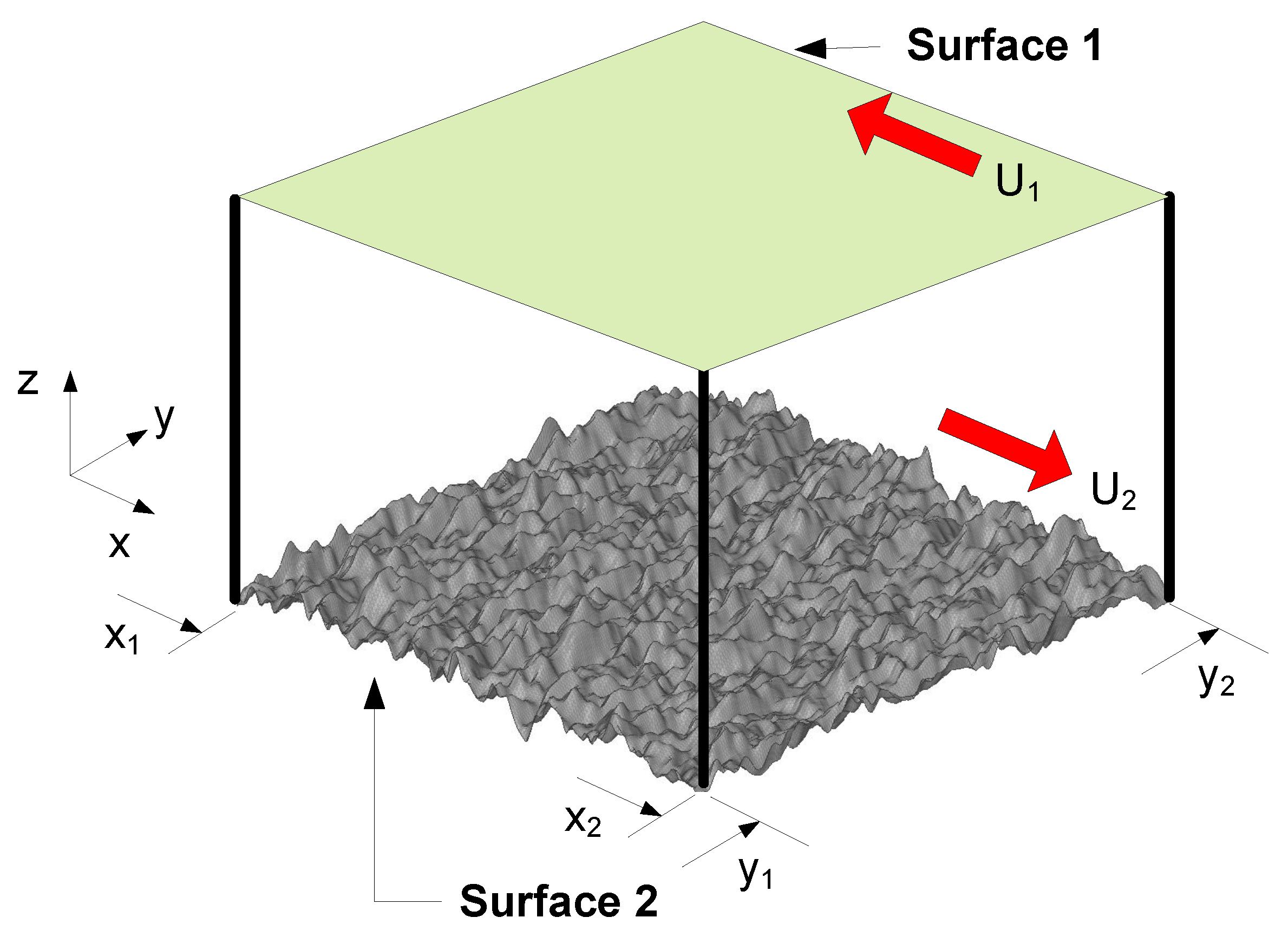
The two sliding surfaces 1 and 2 exhibit local height changes
and
, which are measured from the mean level of each surface.
Figure 1 is showing a 2D cross section through the 3D geometry with geometric definitions and visualization of the flow rate calculation. Pressure and velocity boundary conditions are described in
Section 3.2. In the lubrication gap generated from these two surfaces, the nominal gap height
, is defined as the difference between the mean levels of the two surfaces
and
:
The local rough gap height
h is then defined as:
The solution of the Navier-Stokes equations for the rough lubrication gap results in a velocity and a pressure field. This data can be used to calculate the volume flow rate passing through a y-z cut plane with area
A, located within the control volume. The volume flow rate of the rough gap
is then defined as:
As described in [
12,
16], it is necessary to differentiate between pressure and shear driven effects. The implementation of appropriate boundary conditions (see
Section 3.2) allows the calculation of the volume flow rate and subsequently the pressure and shear flow factors. In addition, a perfectly smooth lubricating gap shows a volume flow which can be defined by the Reynolds equation. The volume flow rate through an area with height
and width
b, driven by a pressure gradient
is given by:
With respect to the relative velocity of the two sliding surfaces
, the volume flow rate of a purely shear-driven flow can be formulated as follows:
The pressure and shear flow factors are calculated as ratios between the flow rates through a rough and a smooth gap of same nominal gap height
given by Equations (
9) and (
10). This formulation is given by the publication of de Kraker [
31,
32].
Patir and Cheng [
12,
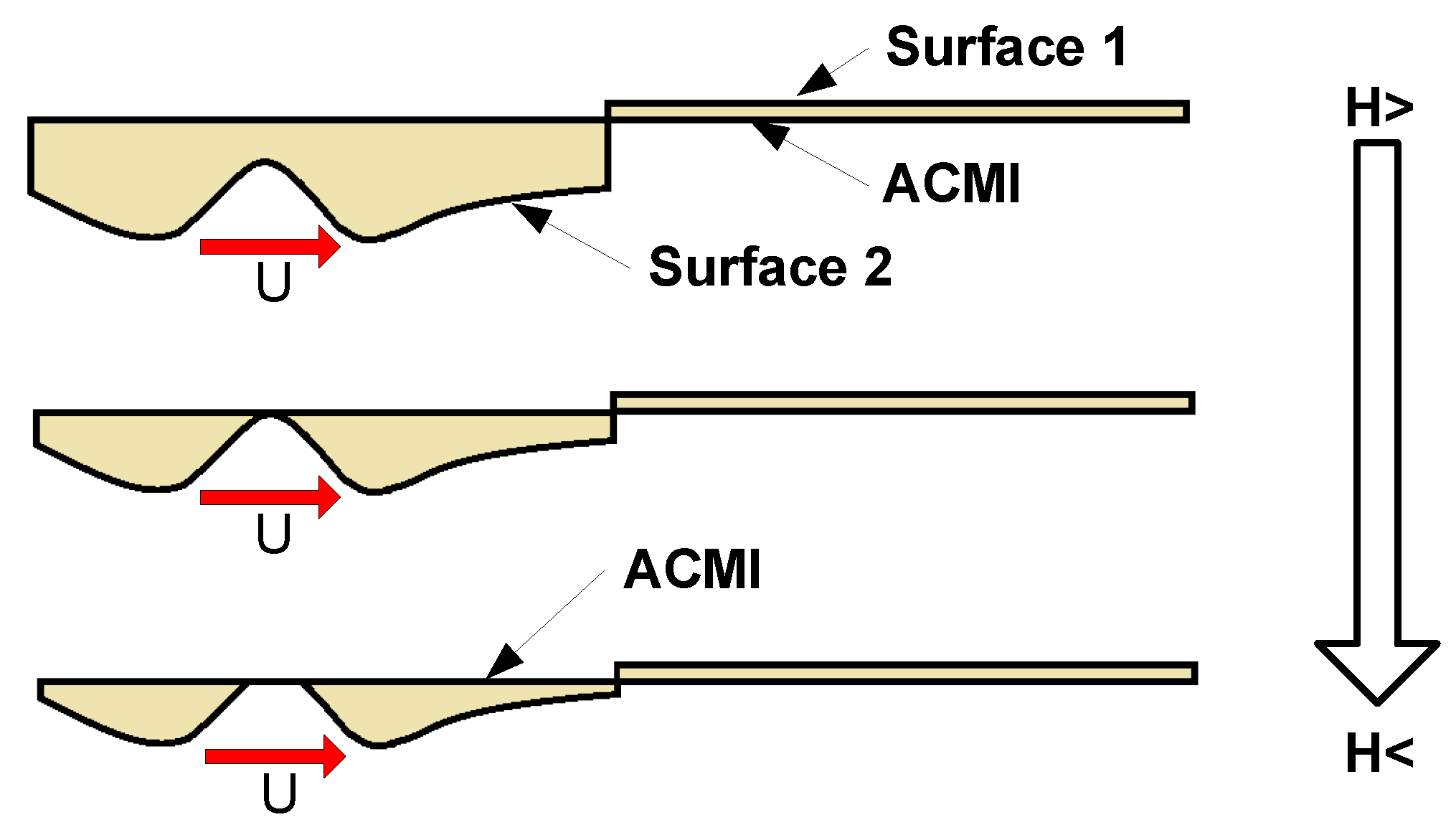
16] calculated flow factors for generic surfaces with normal-distributed roughness. For these surfaces, the authors defined empiric equations for the flow factors as a function of the normalized gap height
H. In this paper these equations will be put in relation to the flow factor curves, calculated by the herein described method. By the use of the standard deviation
of the rough surface, the normalized gap height
H can be defined:
Besides the factor
H, the orientation of the surface structure in relation to the flow direction also influences the flow factors. The orientation is given by the so-called Peklenik factor
[
39] which is the relation of the correlation lengths
in x- and y-direction (at which the auto correlation function reduces to 50 percent of its original value). The suffixes subscripts
x and
y refer to directions along and perpendicular to the direction of flow.
A value of describes a roughness pattern of ridges and valleys oriented along the flow direction, while models surfaces with ridges and valleys perpendicular across the main flow direction. We will refer to these situation as “roughness oriented along or across flow direction” respectively.
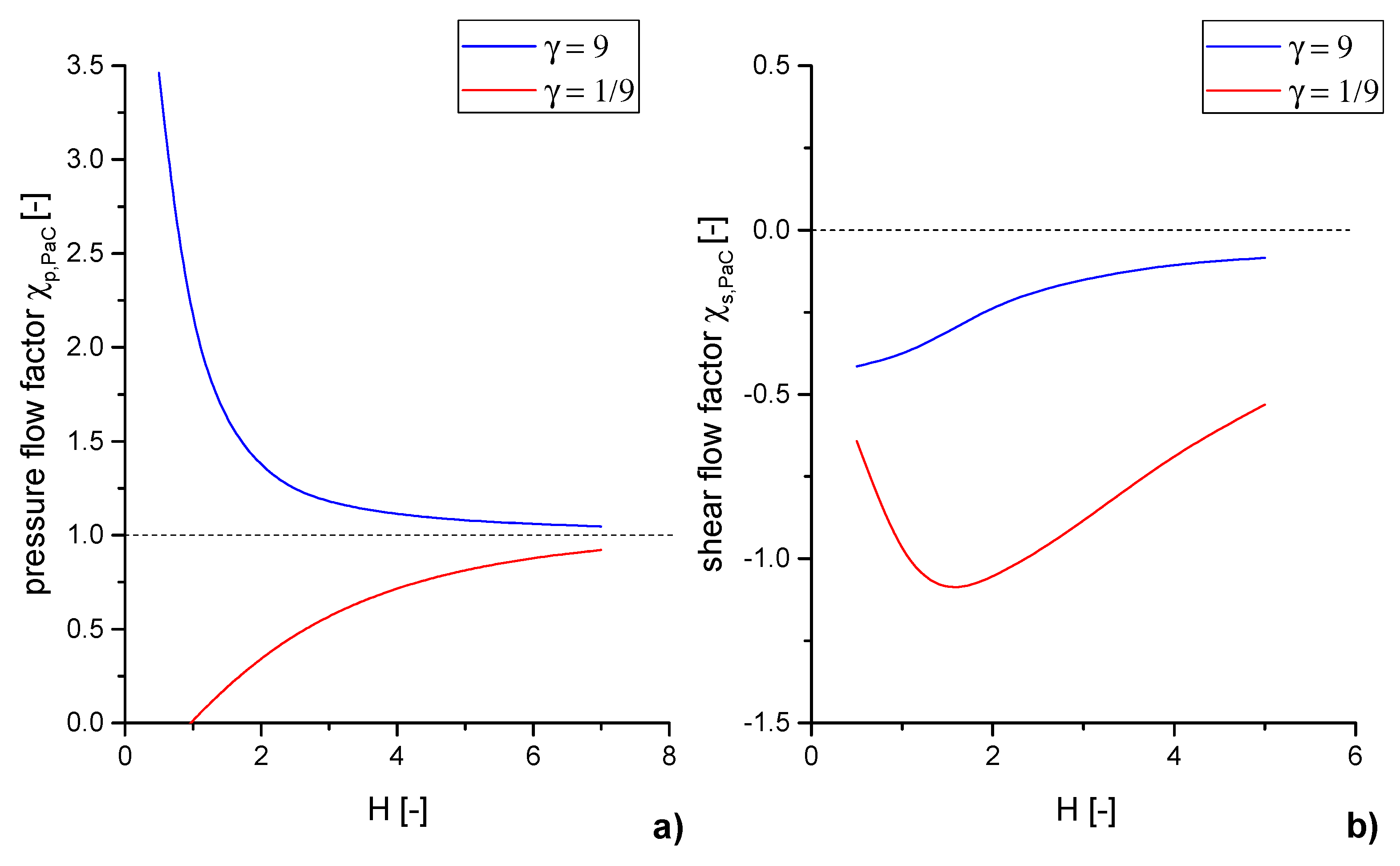
The simulation results by Patir and Cheng were summarized with empiric fitting functions, varying between pressure and shear flow and orientation. With (
11) and (
12) the empiric equation for the pressure flow factor
according to Patir and Cheng can be written as:
The empiric equation for the shear flow factor
according to Patir and Cheng is given in a similar way (for the case in which the smooth surface is moving):
The constant fitting parameters in this equation for two orientations which we will investigate in this article are given in
Table 1:
For visualization, the flow factors are plotted against
H in
Figure 2. Notice that for a pressure flow factor
and for a shear flow factor
the surface topography has no influence on the volume flow rate.
The empiric Equations (
13) and (
14) do not incorporate the influence of pressure and shear gradients. However, the non-linear terms of the Navier-Stokes equations allow the consideration of the effects of the pressure and shear gradient which shows significant effect on the fluid flow [
31,
32].
Implemented in the macro-scale Reynolds equation, the flow factors directly influence the behavior of tribological engineering elements, like journal bearings [
40]. In this sense, structures which exhibit a lay cross the lubricant’s flow direction (
), hampered the flow and showing a increased pressure build-up on the large scale system, but also a higher fluid friction. For cases where the surface structure is oriented along the flow direction (
), an increasing flow compared to an ideal smooth gap can be recognized. This results in a reduced pressure build-up and, on the other hand, a lower fluid friction of the large scale system.
Literature review identifies different ways of implementating flow factors in the Reynolds equation. According to Patir and Cheng, the two-dimensional Reynolds equation with implemented flow factors is given by Equation (
15) [
12,
16]. The flow factor
is the pressure flow factor for a flow in y-direction and the surface velocities
and
are only applied in x-direction.
However, de Kraker suggests an implementation of the flow factors in the following way. The cross term factor, which considers the dependence between the pressure and the shear flow factor for strong structured surfaces, was not taken into account for the research in this article (see [
32]):
To allow a comparison between the theory according to Patir and Cheng and the results obtained with the Navier-Stokes equations, both averaged Reynolds equations are equalized. For simplification, the
-terms were neglected, like it would be in a contact with infinite width [
41]. Furthermore, no overall cross flow in the computational domain and consequently, no extradiagonal flow factor terms occur because in our simulations the roughness structures are oriented strictly parallel or transverse to the main flow direction. In our case we use only one moving surface, so that we set
.
For a purely pressure driven flow the surface velocity
turn to zero and from Equation (
17) only the pressure terms remain:
By solving this equation for
it can be shown that the two pressure flow factors can be compared directly.
For a purely shear driven flow, no pressure gradient
/
is applied and Equation (
17) turns into following form:
Integrating Equation (
20) yields the following relation between
and
:
We use this relation to compare our approach to the Patir and Cheng method.
4. Simulation Results and Discussion
For the described geometry pressure and shear flow factors for orientation, and were calculated and compared with the empirical equations of Patir and Cheng. To better understand the influence of the pressure and shear gradient as well as the difference between “Mapping” and “Moving Mesh” of the shear flow simulation, these matters were investigated.
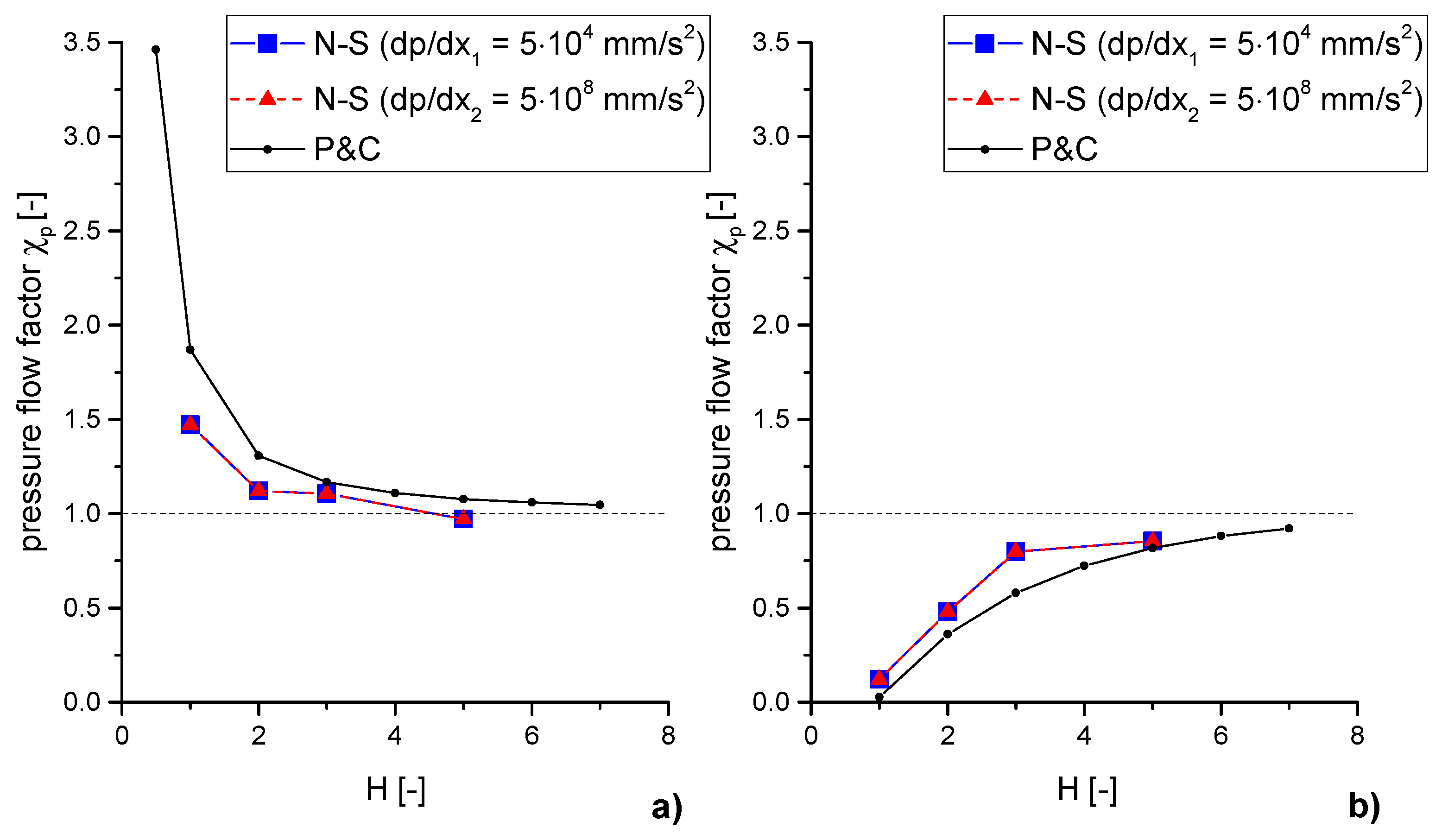
4.1. Influence of Orientation and Pressure/Shear Gradient
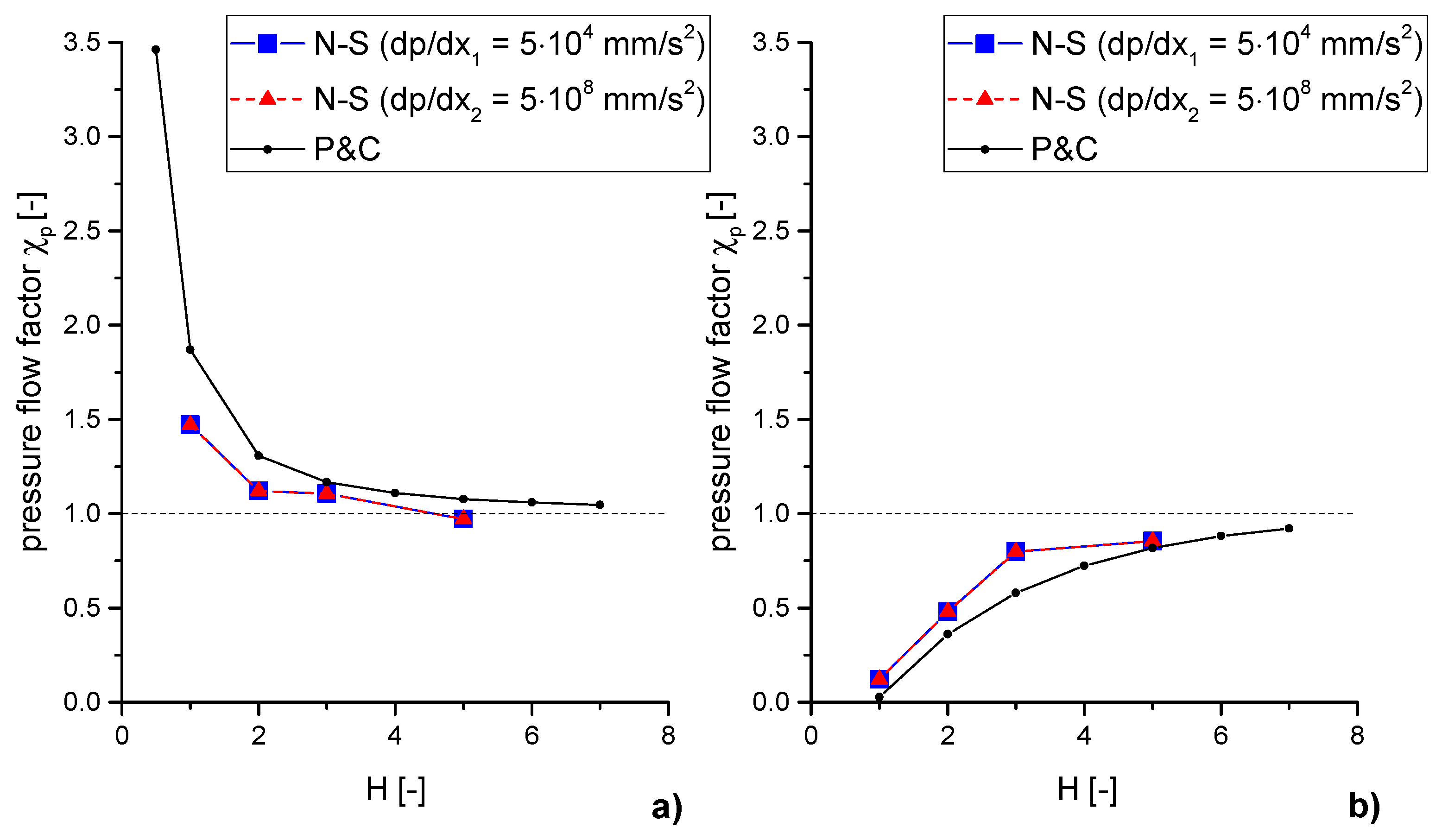
The pressure flow factors for the two different orientations can be directly compared with the curves according to Patir & Cheng. However, two different pressure gradients (density-free pressure (mm2/s2) is used), which represent operating conditions such as found those in lower and a higher loaded areas in a journal bearing, were applied (mm/s and mm/s). Every calculated data point in the following figures represents one CFD-simulation of the lubrication gap. Due to the computational effort, an averaging over several simulations was not used. Moreover, by using large surfaces which cover several multiples of the correlation length, averaging was not seen as necessary to achieve a proof of principle.
The results show the same trend as the curves according to Patir & Cheng (see
Figure 6). When the surface structures are oriented along the flow direction, the flow factor is greater than 1, which means the volume flow in the rough lubricating gap is greater than in the perfectly smooth gap. It can be observed that the flow factor does not depend on the pressure gradient. This is due to the laminar flow regime (valid for the smaller and the larger pressure gradient) as well as the relatively smooth surface topography. A dependency on the pressure flow gradient may arise with stronger topography variation, like surface texturing [
31,
32]. Furthermore, the numerical simulation with the Navier-Stokes equations shows a more conservative behavior of the flow factors, which means that the roughness shows less influence on the flow behavior.
In the case of , which is for roughness pattern oriented across the main flow direction, numerical analysis with the Navier-Stokes equations, as well as the result from Patir & Cheng show a flow reduction, which lead to flow factors smaller than 1. In this case no influence of the pressure gradient could be recognized. Furthermore, the results from the Navier-Stokes simulation show a more conservative behavior. In addition, a characteristic kink at can be observed. This phenomenon could be related to the beginning contact of the two surfaces for -values between 2 and 3.
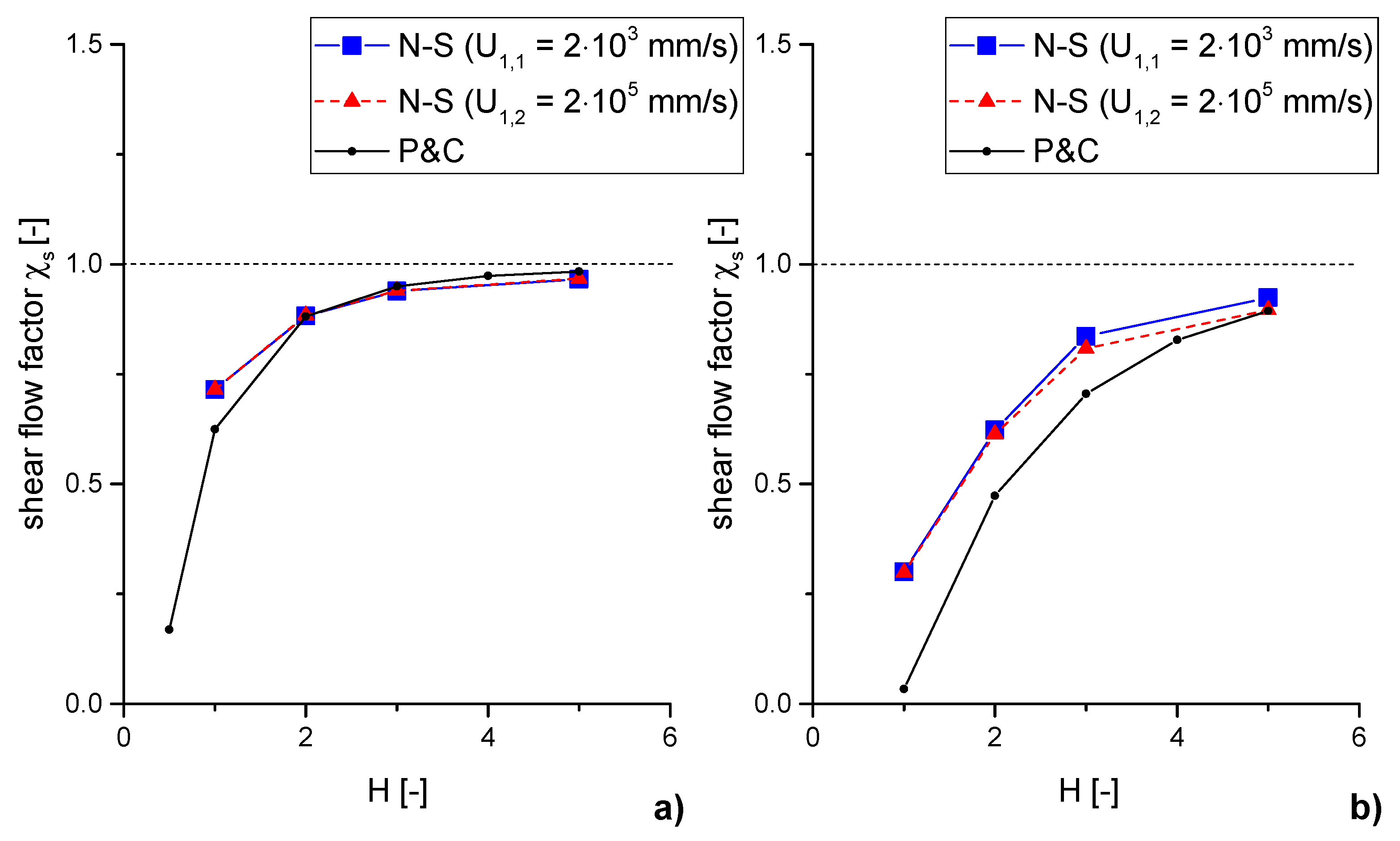
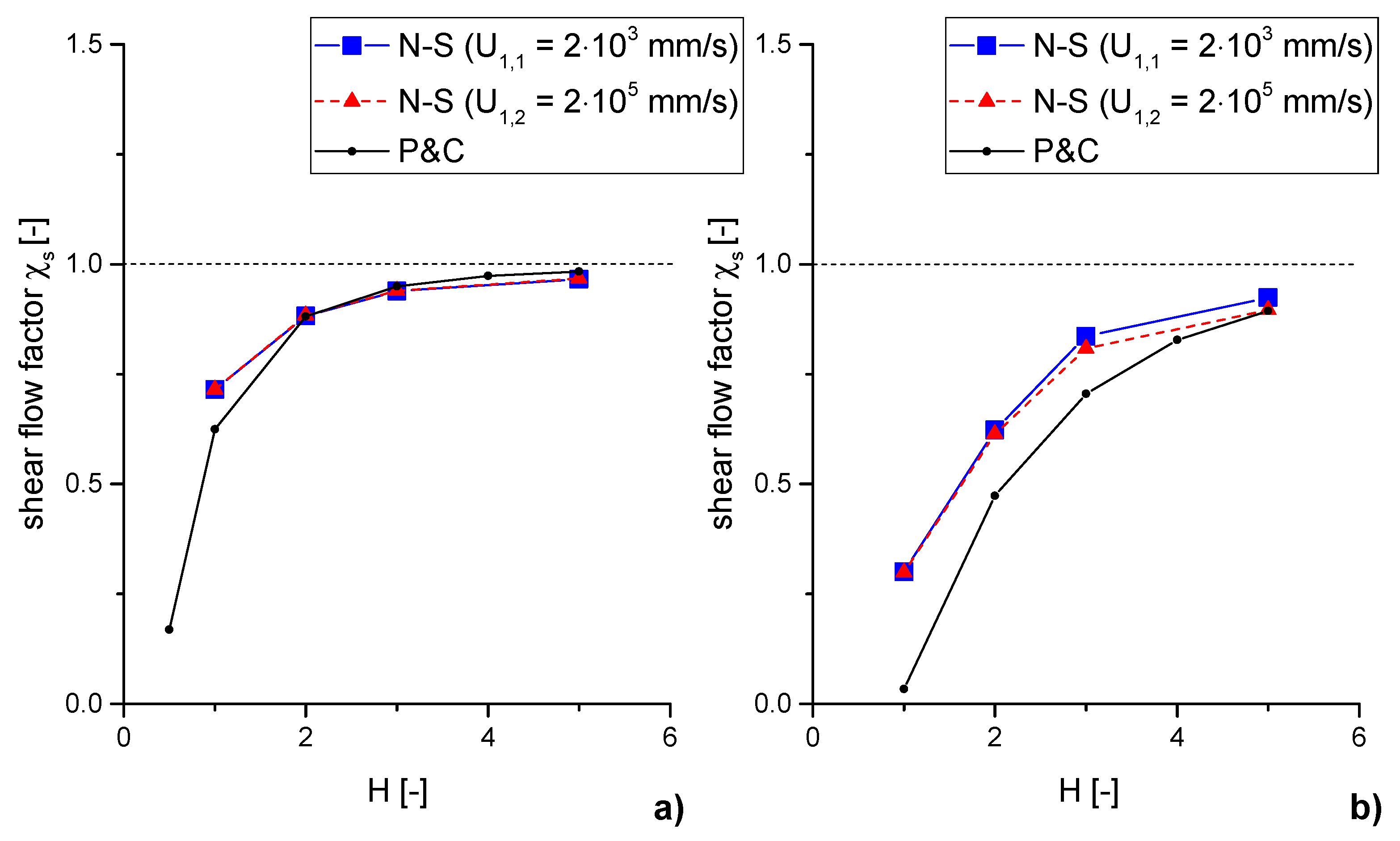
The shear flow factors (see
Figure 7) were also calculated for two different relative velocities (
mm/s and
mm/s). As moving surface the smooth one was chosen. The simulation was carried out by a “Mapping” of the wall velocity on the fluid velocity.
For the comparison of the calculated flow factors according to de Kraker
and the flow factors by Patir and Cheng
, the latter were converted, using Equation (
21).
The results based on the Navier-Stokes equations show the same trends like the flow factors based on Patir & Cheng. For the roughness orientation in flow direction, the results from the Navier-Stokes equations show good agreement with the results of Patir and Cheng. For smaller gap heights Patir and Cheng predict a greater influence of the micro structure according to a smaller shear flow factor. The different relative velocities show no influence.
With roughness orientation across the flow direction, a larger difference results between the Patir and Cheng shear flow factors and the calculated ones. However, similar to the results of the pressure flow factor, the N-S curve shows a kink at
. Furthermore, other authors recognize a poor fitting with their results to the results of Patir and Cheng for boundary conditions quite similar to those used in this paper [
22,
42,
49].
Driven by different relative surface velocities, the results from the Navier-Stokes equations show differences at greater gap heights. This can by explained by the presence of micro-turbulences which are initiated from the cross-lying roughness structures. With rising gap height, the potential for turbulences rises, as it can be seen from the definition of the Reynolds number (see Equation (
23)), which estimates the onset of turbulences.
4.2. Influence of the Numerical Method on the Shear Flow Factor
The difference between the numerical methods “Mapping”, “Moving Mesh” and the method according to Patir and Cheng were investigated. For a smooth moving wall both numerical methods are available. So the novel approach can be tested in contribution with other numerical methods. Because the use of a “Moving Mesh” needs a movable volume, a flow on contact points takes place. Due to this restriction for the use of the “Moving Mesh” at low gap heights, the contribution was performed at one gap height in full fluid friction regime. The results are given in the
Table 4.
The difference between the different numerical methods is small and can by attributed to numerical errors. The method of Patir and Cheng shows a bigger difference because of the reasons described in the previous section (see
Section 4.1). Thus, the moving mesh method is validated for simulation of shear flow caused by a moving rough surface. This task is performed in the next step.
For the same reasons that restrict the simulation of moving smooth surface, the simulation of the rough moving surface is carried out at full hydrodynamic lubrication. The results of the “Moving Mesh”-Simulation are compared with empiric equations from Patir and Cheng, for a rough moving surface. The results are given in the
Table 5.
The results show the same trend as expected for a rough moving surface. The values are greater than 1 and indicate that the volume flow is greater than in a perfectly smooth gap. However, the accordance is good and the difference is not larger than in the previous investigations. This indicates a proper run of the shear flow simulation. Thus, by using a “Moving Mesh”, it is possible to investigate complex geometries also on the sliding surface.
5. Conclusions and Outlook
The results of Patir and Cheng for the calculation of flow factors [
12,
16] were compared with simulations based on Navier-Stokes equations for flow at the microscopic scale. The relatively soft height changes justify the use of the Reynolds equation. Nevertheless, the novel method using the mathematical approach of de Kraker [
31,
32] shows differences with the results from Patir and Cheng. This is attributed to the fact that just one surface was considered for calculation whereas Patir and Cheng performed an averaging of the results from 10 different surfaces.
Furthermore, the influence of pressure and shear gradient on the flow factors were investigated. For a laminar flow in the lubrication gap and the investigated geometry, the differences for the flow factors for different pressure and shear gradients are small or not present at all.
Moreover, the behavior of the shear flow factor for a moving rough surface was discussed. For this research, a numerical approach was designed which expands the method of de Kraker. After a validation of the novel method by the implementation of a smooth moving surface, the method was used to calculate the shear flow for a rough moving surface. However, due to restrictions for gap heights where solid contacts can occur, the method was only used for full fluid lubrication.
The goal for further works is to make the method also work for low gap heights, as well as to minimize the computation time. Especially, application to strongly structured surfaces will be the focus of further investigations. The research and development of textured surfaces for reducing friction or generating a faster pressure build-up in lubricating contacts, like journal bearings or linear sliders, are examples of the industrial use of the novel flow factor method.

 ,
, 



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}