
Modulation of Lower-Limb Muscle Activity in Maintaining Unipedal Balance According to Surface Stability, Sway Direction, and Leg Dominance


Abstract
:1. Introduction
2. Materials and Methods
2.1. Participants
2.2. Equipment
2.3. Experimental Procedures
2.4. Data Analysis
2.4.1. EMG and COP Data Pre-Processing
2.4.2. Calculating EMG–COP Correlation
2.4.3. Analyzing Patterns of EMG–COP Correlations
2.5. Statistical Analysis
3. Results
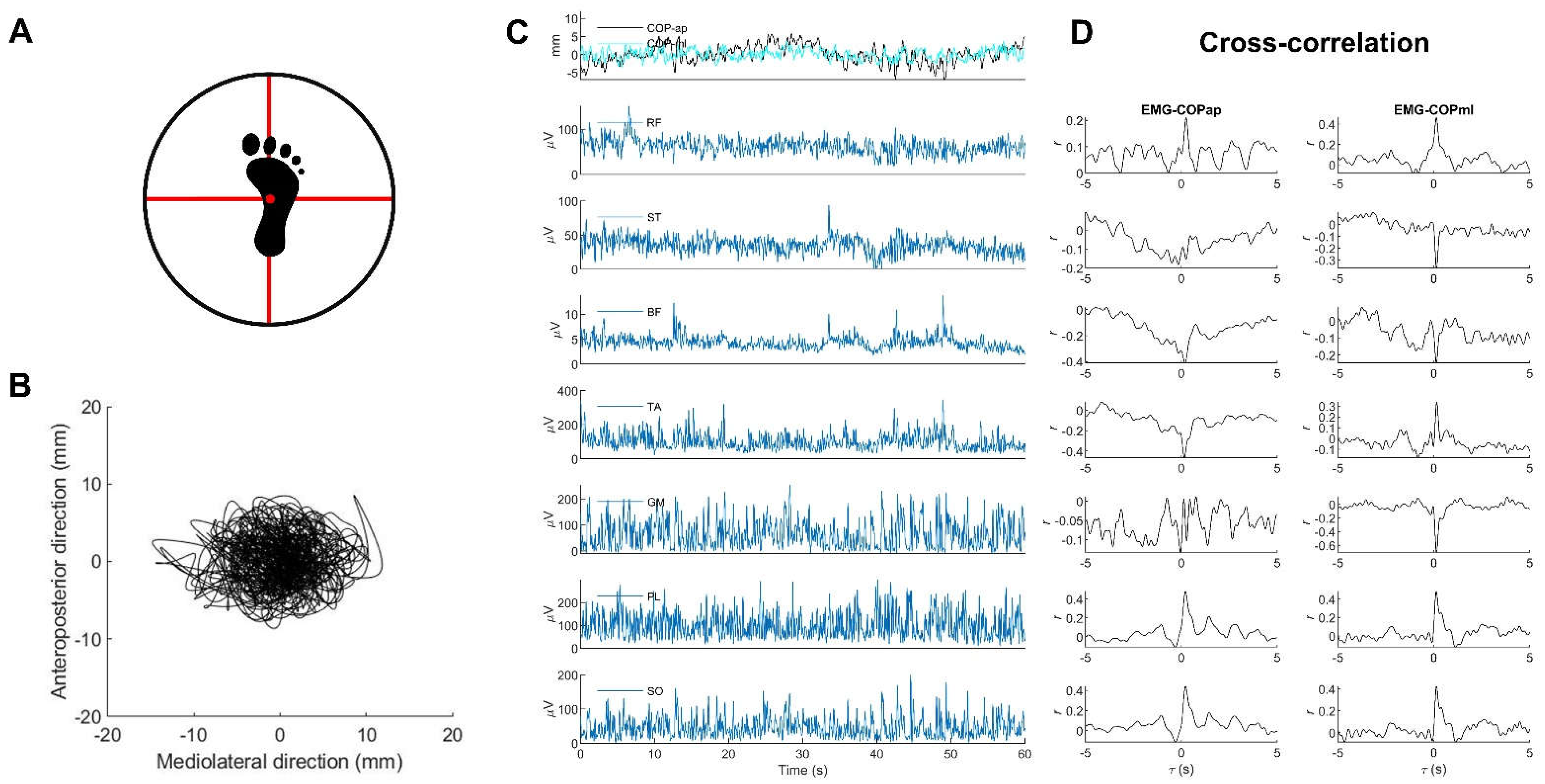
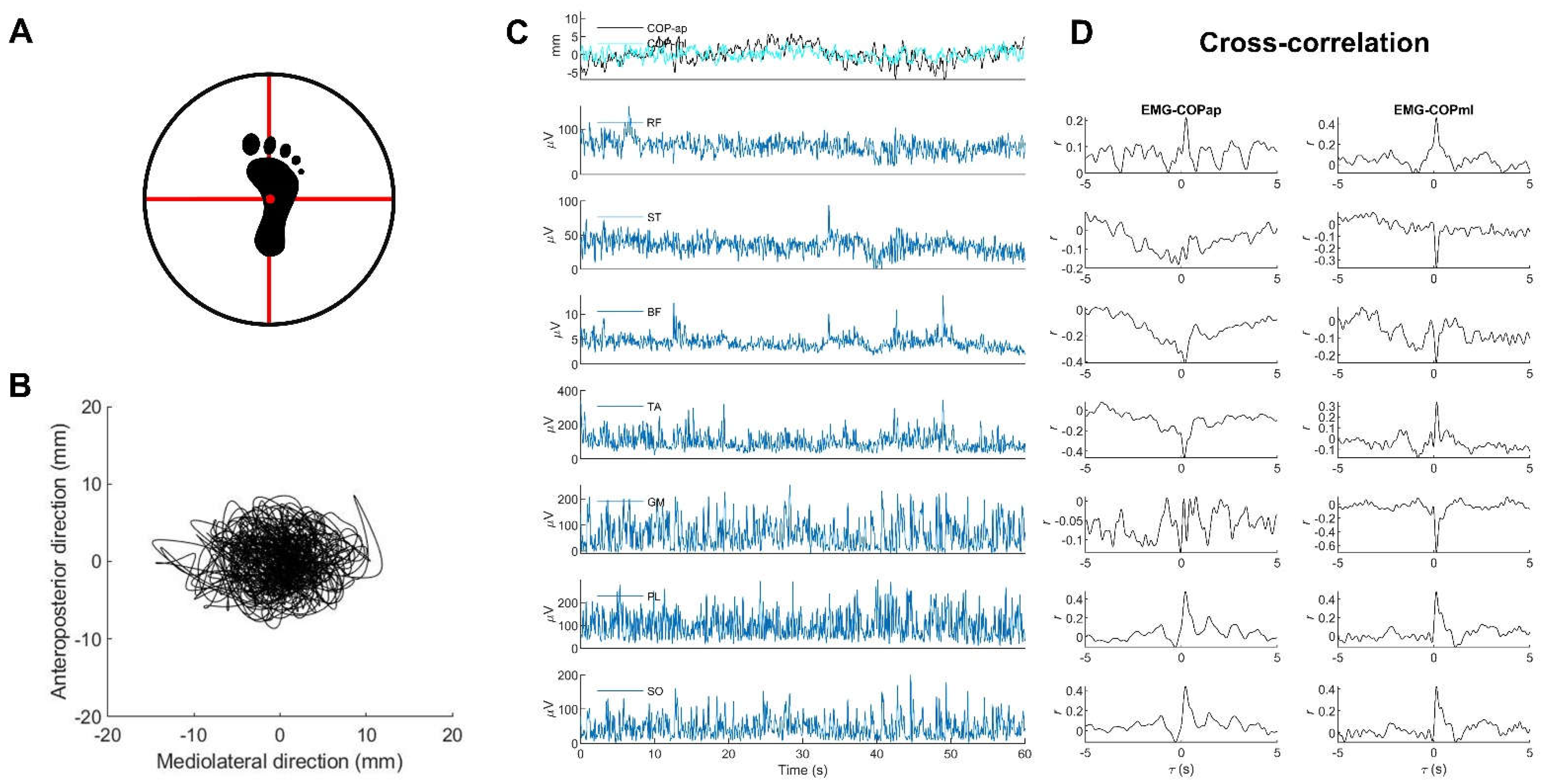
3.1. An Overview of EMG–COP Correlation
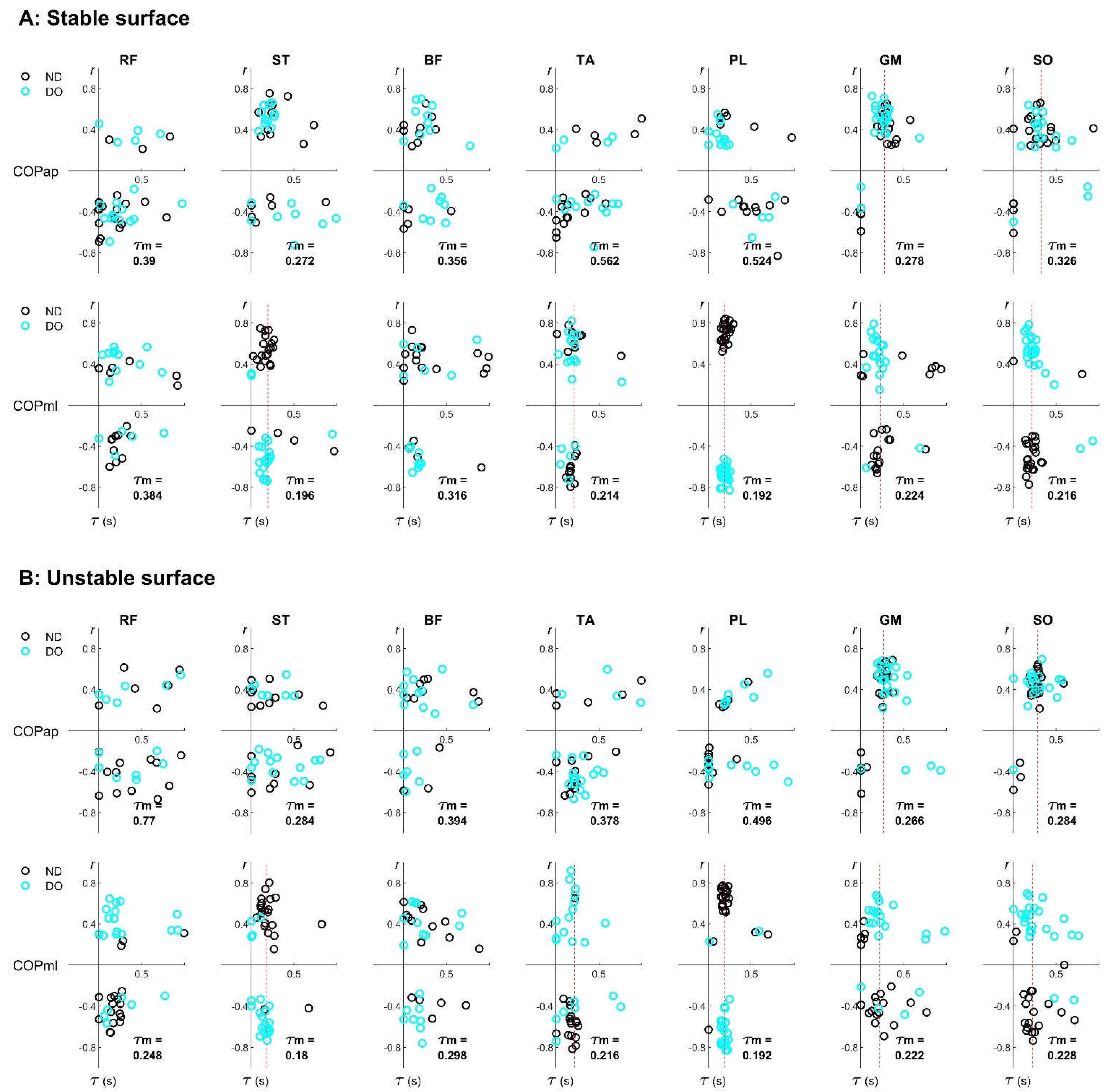
3.2. Individual Pairs of EMG–COP Correlation
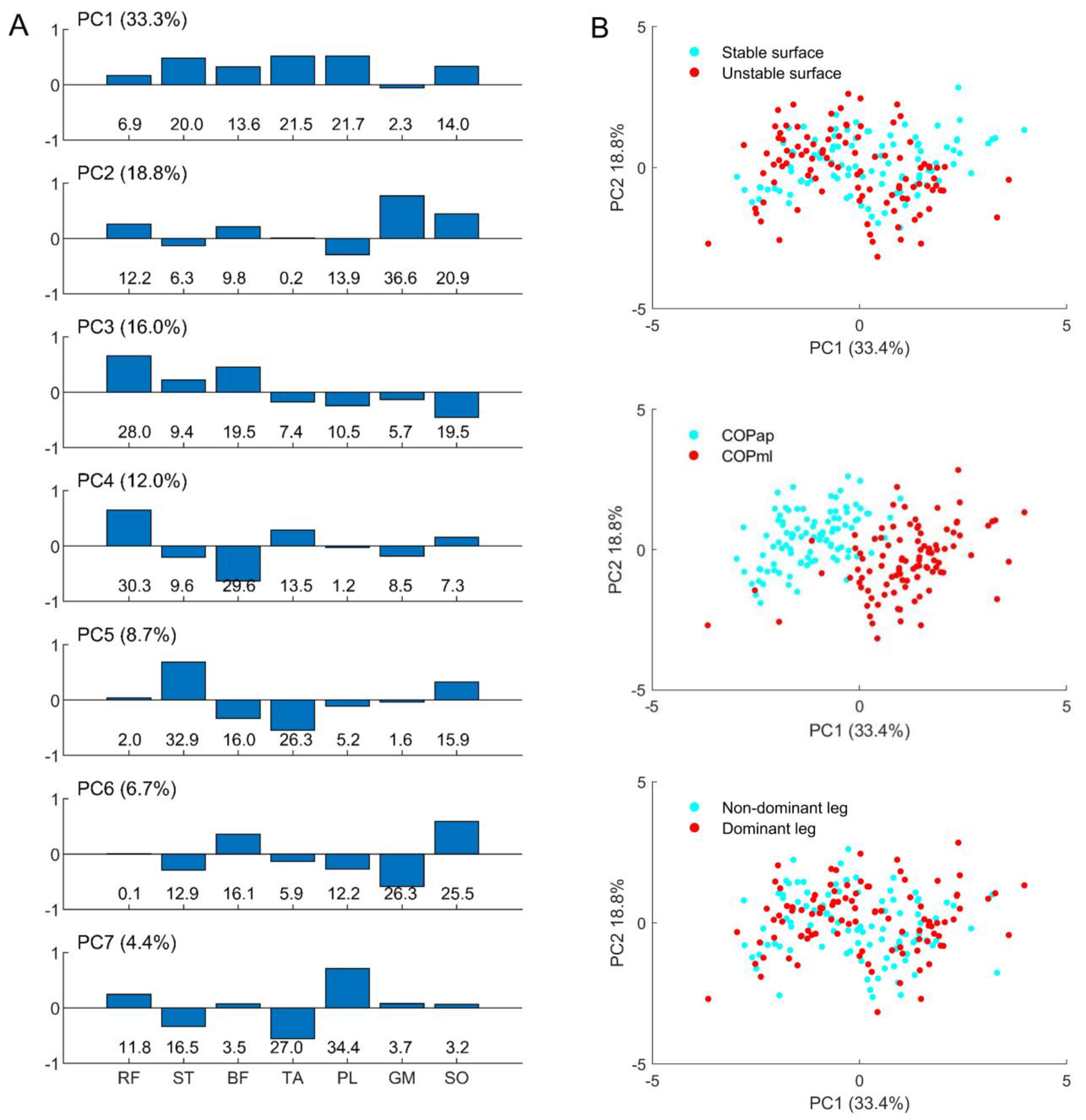
3.3. Patterns of EMG–COP Correlation
4. Discussion
Limitations and Future Study
5. Conclusions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Jonsson, E.; Seiger, Å.; Hirschfeld, H. One-leg stance in healthy young and elderly adults: A measure of postural steadiness? Clin. Biomech. 2004, 19, 688–694. [Google Scholar] [CrossRef] [PubMed]
- Hrysomallis, C. Balance ability and athletic performance. Sport. Med. 2011, 41, 221–232. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Emery, C. Is there a clinical standing balance measurement appropriate for use in sports medicine? A review of the literature. J. Sci. Med. Sport 2003, 6, 492–504. [Google Scholar] [CrossRef]
- Horak, F.B.; Wrisley, D.M.; Frank, J. The balance evaluation systems test (BESTest) to differentiate balance deficits. Phys. Ther. 2009, 89, 484–498. [Google Scholar] [CrossRef] [PubMed]
- Nelson-Wong, E.; Appell, R.; McKay, M.; Nawaz, H.; Roth, J.; Sigler, R.; Third, J.; Walker, M. Increased fall risk is associated with elevated co-contraction about the ankle during static balance challenges in older adults. Eur. J. Appl. Physiol. 2012, 112, 1379–1389. [Google Scholar] [CrossRef] [PubMed]
- Kozinc, Ž.; Löfler, S.; Hofer, C.; Carraro, U.; Šarabon, N. Diagnostic Balance Tests for Assessing Risk of Falls and Distinguishing Older Adult Fallers and Non-Fallers: A Systematic Review with Meta-Analysis. Diagnostics 2020, 10, 667. [Google Scholar] [CrossRef]
- Promsri, A.; Haid, T.; Federolf, P. How does lower limb dominance influence postural control movements during single leg stance? Hum. Mov. Sci. 2018, 58, 165–174. [Google Scholar] [CrossRef]
- Promsri, A.; Haid, T.; Werner, I.; Federolf, P. Leg dominance effects on postural control when performing challenging balance exercises. Brain Sci. 2020, 10, 128. [Google Scholar] [CrossRef] [Green Version]
- Promsri, A.; Longo, A.; Haid, T.; Doix, A.-C.M.; Federolf, P. Leg dominance as a risk factor for lower-limb injuries in downhill skiers—A pilot study into possible mechanisms. Int. J. Environ. Res. Public Health 2019, 16, 3399. [Google Scholar] [CrossRef] [Green Version]
- Zech, A.; Hübscher, M.; Vogt, L.; Banzer, W.; Hänsel, F.; Pfeifer, K. Balance Training for Neuromuscular Control and Performance Enhancement: A Systematic Review. J. Athl. Train. 2010, 45, 392–403. [Google Scholar] [CrossRef]
- Rasool, J.; George, K. The impact of single-leg dynamic balance training on dynamic stability. Phys. Ther. Sport 2007, 8, 177–184. [Google Scholar] [CrossRef]
- Duarte, M.; Freitas, S. Revision of posturography based on force plate for balance evaluation. Rev. Bras. Fisioter. 2010, 14, 183–192. [Google Scholar] [CrossRef] [Green Version]
- Federolf, P.; Angulo-Barroso, R.M.; Busquets, A.; Ferrer-Uris, B.; Gløersen, Ø.; Mohr, M.; Ó’ Reilly, D.; Promsri, A.; van Andel, S.; Wachholz, F.; et al. Letter to the editor regarding “The assessment of center of mass and center of pressure during quiet stance: Current applications and future directions”. J. Biomech. 2021, 128, 110729. [Google Scholar] [CrossRef]
- Promsri, A.; Mohr, M.; Federolf, P. Principal postural acceleration and myoelectric activity: Interrelationship and relevance for characterizing neuromuscular function in postural control. Hum. Mov. Sci. 2021, 77, 102792. [Google Scholar] [CrossRef]
- Edwards, W.B.; Derrick, T.R.; Hamill, J. Time series analysis in biomechanics. In Handbook of Human Motion; Springer International Publishing: Cham, Switzerland, 2017; pp. 1–24. [Google Scholar]
- Nelson-Wong, E.; Howarth, S.; Winter, D.A.; Callaghan, J.P. Application of autocorrelation and cross-correlation analyses in human movement and rehabilitation research. J. Orthop. Sports Phys. Ther. 2009, 39, 287–295. [Google Scholar] [CrossRef] [Green Version]
- Gatev, P.; Thomas, S.; Kepple, T.; Hallett, M. Feedforward ankle strategy of balance during quiet stance in adults. J. Physiol. 1999, 514, 915–928. [Google Scholar] [CrossRef]
- Lemos, T.; Imbiriba, L.A.; Vargas, C.D.; Vieira, T.M. Modulation of tibialis anterior muscle activity changes with upright stance width. J. Electromyogr. Kinesiol. 2015, 25, 168–174. [Google Scholar] [CrossRef]
- Sozzi, S.; Honeine, J.L.; Do, M.C.; Schieppati, M. Leg muscle activity during tandem stance and the control of body balance in the frontal plane. Clin. Neurophysiol. 2013, 124, 1175–1186. [Google Scholar] [CrossRef]
- Croft, J.L.; Von Tscharner, V.; Zernicke, R.F. Movement variability and muscle activity relative to center of pressure during unipedal stance on solid and compliant surfaces. Motor Control 2008, 12, 283–295. [Google Scholar] [CrossRef] [Green Version]
- Lemos, T.; Rodrigues, E.C.; Vargas, C.D. Motor imagery modulation of postural sway is accompanied by changes in the EMG–COP association. Neurosci. Lett. 2014, 577, 101–105. [Google Scholar] [CrossRef]
- van Melick, N.; Meddeler, B.M.; Hoogeboom, T.J.; Nijhuis-van der Sanden, M.W.G.; van Cingel, R.E.H. How to determine leg dominance: The agreement between self-reported and observed performance in healthy adults. PLoS ONE 2017, 12, e0189876. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Murphy, D.F.; Connolly, D.A.J.; Beynnon, B.D. Risk factors for lower extremity injury: A review of the literature. Br. J. Sport. Med. 2003, 37, 13–29. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Burtscher, M.; Sommersacher, R.; Ruedl, G.; Nachbauer, W. Potential risk factors for knee injuries in alpine skiers. In ASTM Special Technical Publication; ASTM International: West Conshohocken, PA, USA, 2009; Volume 1510 STP, pp. 73–76. [Google Scholar]
- Ruedl, G.; Webhofer, M.; Helle, K.; Strobl, M.; Schranz, A.; Fink, C.; Gatterer, H.; Burtscher, M. Leg Dominance Is a Risk Factor for Noncontact Anterior Cruciate Ligament Injuries in Female Recreational Skiers. Am. J. Sport. Med. 2012, 40, 1269–1273. [Google Scholar] [CrossRef]
- Lai, A.K.M.; Biewener, A.A.; Wakeling, J.M. Muscle-specific indices to characterise the functional behaviour of human lower-limb muscles during locomotion. J. Biomech. 2019, 89, 134–138. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Bernstein, N.A. The co-ordination and regulation of movements: Conclusions towards the Study of Motor Co-ordination. Biodyn. Locomot. 1967, 27, 104–113. [Google Scholar] [CrossRef] [Green Version]
- Safavynia, S.A.; Torres-Oviedo, G.; Ting, L.H. Muscle Synergies: Implications for Clinical Evaluation and Rehabilitation of Movement. Top. Spinal Cord Inj. Rehabil. 2011, 17, 16–24. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Krishnamoorthy, V.; Latash, M.L.; Scholz, J.P.; Zatsiorsky, V.M. Muscle synergies during shifts of the center of pressure by standing persons. Exp. Brain Res. 2003, 152, 281–292. [Google Scholar] [CrossRef]
- Torres-Oviedo, G.; Ting, L.H. Subject-specific muscle synergies in human balance control are consistent across different biomechanical contexts. J. Neurophysiol. 2010, 103, 3084–3098. [Google Scholar] [CrossRef] [Green Version]
- Hermens, H.J.; Freriks, B.; Disselhorst-Klug, C.; Rau, G. Development of recommendations for SEMG sensors and sensor placement procedures. J. Electromyogr. Kinesiol. 2000, 10, 361–374. [Google Scholar] [CrossRef]
- Promsri, A.; Haid, T.; Federolf, P. Complexity, composition, and control of bipedal balancing movements as the postural control system adapts to unstable support surfaces or altered feet positions. Neuroscience 2020, 430, 113–124. [Google Scholar] [CrossRef]
- De Luca, C.J. The use of surface electromyography in biomechanics. J. Appl. Biomech. 1997, 13, 135–163. [Google Scholar] [CrossRef] [Green Version]
- Promsri, A. Modulation of bilateral lower-limb muscle coordination when performing increasingly challenging balance exercises. Neurosci. Lett. 2022, 767, 136299. [Google Scholar] [CrossRef]
- Cohen, J. Statistical Power Analysis for the Behavioral Sciences, 2nd ed.; Cox, B.J., Endler, N.S., Swinson, R., Eds.; PErlbaum: Hillsdale, NJ, USA, 1998. [Google Scholar]
- Laine, C.M.; Negro, F.; Farina, D. Neural correlates of task-related changes in physiological tremor. J. Neurophysiol. 2013, 110, 170–176. [Google Scholar] [CrossRef]
- Holm, S. A simple sequentially rejective Bonferroni test procedure. Scand. J. Stat. 1979, 6, 65–70. [Google Scholar] [CrossRef]
- Promsri, A.; Federolf, P. Analysis of Postural Control Using Principal Component Analysis: The Relevance of Postural Accelerations and of Their Frequency Dependency for Selecting the Number of Movement Components. Front. Bioeng. Biotechnol. 2020, 8, 480. [Google Scholar] [CrossRef]
- Brophy, R.; Silvers, H.J.; Gonzales, T.; Mandelbaum, B.R.; Holly, M.; Silvers, J.; Mandelbaum, B.R. Gender influences: The role of leg dominance in ACL injury among soccer players. Br. J. Sport. Med. 2010, 44, 694–697. [Google Scholar] [CrossRef]
- Steidl-Müller, L.; Hildebrandt, C.; Müller, E.; Fink, C.; Raschner, C. Limb symmetry index in competitive alpine ski racers: Reference values and injury risk identification according to age-related performance levels. J. Sport Health Sci. 2018, 7, 405–415. [Google Scholar] [CrossRef]
- Parrington, L.; Ball, K. Biomechanical Considerations of Laterality in Sport. In Laterality in Sports: Theories and Applications; Elsevier: Amsterdam, The Netherlands, 2016; pp. 279–308. ISBN 9780128014264. [Google Scholar]

{kind=link}
{kind=link}
{kind=link}
| Total (n = 25) | Male (n = 14) | Female (n = 11) | |
|---|---|---|---|
| Age (years) | 25.6 ± 4.0 | 25.9 ± 2.9 | 25.3 ± 5.1 |
| Weight (kg) | 71.0 ± 11.5 | 77.0 ± 10.8 | 62.7 ± 5.2 * |
| Height (cm) | 175.0 ± 8.3 | 180.1 ± 7.2 | 168.5 ± 3.9 * |
| Body mass index (kg/m2) | 23.1 ± 2.7 | 23.9 ± 2.8 | 22.1 ± 2.3 |
| Physical activity participation (hours/week) | 8.4 ± 5.1 | 8.1 ± 5.5 | 8.8 ± 4.7 |
| A: Surface Stability | |||||
|---|---|---|---|---|---|
| Muscles | SS | US | p-Value | Effect size | Power |
| RF | 0.40 ± 0.07 | 0.38 ± 0.07 | 0.020 # | 0.277 | 0.389 |
| ST | 0.47 ± 0.10 | 0.45 ± 0.10 | 0.164 | 0.192 | 0.214 |
| BF | 0.42 ± 0.08 | 0.40 ± 0.06 | 0.015 # | 0.342 | 0.545 |
| TA | 0.51 ± 0.09 | 0.49 ± 0.12 | 0.125 | 0.192 | 0.214 |
| PL | 0.58 ± 0.10 | 0.57 ± 0.13 | 0.621 | 0.073 | 0.072 |
| GM | 0.50 ± 0.09 | 0.50 ± 0.11 | 0.730 | 0.056 | 0.063 |
| SO | 0.50 ± 0.11 | 0.49 ± 0.11 | 0.585 | 0.093 | 0.087 |
| B: Sway Direction | |||||
| Muscles | AP | ML | p-Value | Effect size | Power |
| RF | 0.40 ± 0.07 | 0.39 ± 0.07 | 0.232 | 0.159 | 0.161 |
| ST | 0.40 ± 0.07 | 0.52 ± 0.13 | <0.001 * | −1.171 | 0.999 |
| BF | 0.40 ± 0.06 | 0.42 ± 0.09 | 0.139 | −0.233 | 0.292 |
| TA | 0.42 ± 0.08 | 0.58 ± 0.13 | <0.001 * | −1.503 | 1 |
| PL | 0.37 ± 0.06 | 0.78 ± 0.17 | <0.001 * | −3.208 | 1 |
| GM | 0.54 ± 0.10 | 0.47 ± 0.10 | 0.003 * | 0.726 | 0.992 |
| SO | 0.46 ± 0.09 | 0.54 ± 0.12 | 0.002 * | −0.783 | 0.997 |
| C: Leg Dominance | |||||
| Muscles | ND | DO | p-Value | Effect size | Power |
| RF | 0.39 ± 0.08 | 0.40 ± 0.07 | 0.275 | −0.156 | 0.157 |
| ST | 0.44 ± 0.10 | 0.48 ± 0.11 | 0.003 * | −0.462 | 0.799 |
| BF | 0.41 ± 0.07 | 0.41 ± 0.08 | 0.708 | −0.066 | 0.068 |
| TA | 0.50 ± 0.11 | 0.50 ± 0.10 | 0.838 | 0.036 | 0.055 |
| PL | 0.58 ± 0.11 | 0.57 ± 0.12 | 0.765 | 0.041 | 0.057 |
| GM | 0.49 ± 0.09 | 0.52 ± 0.10 | 0.015 # | −0.280 | 0.396 |
| SO | 0.50 ± 0.11 | 0.50 ± 0.11 | 0.661 | −0.048 | 0.060 |
| A: Surface Stability | |||||
|---|---|---|---|---|---|
| rVARk | SS | US | p-Value | Effect size | Power |
| 1 | 24.7 ± 14.0 | 24.4 ± 14.3 | 0.839 | 0.026 | 0.053 |
| 2 | 15.2 ± 9.1 | 19.5 ± 13.3 | 0.023 # | −0.379 | 0.632 |
| 3 | 18.2 ± 12.1 | 14.4 ± 10.1 | 0.061 | 0.345 | 0.552 |
| 4 | 13.9 ± 9.2 | 12.0 ± 9.0 | 0.177 | 0.211 | 0.248 |
| 5 | 9.9 ± 6.8 | 12.3 ± 7.5 | 0.013 # | −0.342 | 0.545 |
| 6 | 10.3 ± 6.7 | 10.1 ± 6.7 | 0.893 | 0.020 | 0.052 |
| 7 | 7.8 ± 6.7 | 7.3 ± 6.5 | 0.584 | 0.077 | 0.075 |
| B: Sway Direction | |||||
| rVARk | AP | ML | p-Value | Effect size | Power |
| 1 | 26.8 ± 16.0 | 22.3 ± 12.3 | 0.129 | 0.317 | 0.484 |
| 2 | 17.9 ± 10.6 | 16.8 ± 11.7 | 0.574 | 0.101 | 0.094 |
| 3 | 17.5 ± 12.0 | 15.1 ± 10.1 | 0.224 | 0.221 | 0.268 |
| 4 | 12.1 ± 8.9 | 13.8 ± 9.3 | 0.234 | −0.187 | 0.205 |
| 5 | 9.8 ± 6.7 | 12.4 ± 7.6 | 0.030 # | −0.372 | 0.615 |
| 6 | 9.4 ± 6.4 | 11.0 ± 7.0 | 0.128 | −0.237 | 0.300 |
| 7 | 6.5 ± 5.2 | 8.6 ± 8.0 | 0.042 # | −0.320 | 0.491 |
| C: Leg Dominance | |||||
| rVARk | ND | DO | p-Value | Effect size | Power |
| 1 | 23.3 ± 14.1 | 25.8 ± 14.2 | 0.174 | −0.172 | 0.181 |
| 2 | 17.6 ± 11.0 | 17.0 ± 11.3 | 0.749 | 0.052 | 0.061 |
| 3 | 16.0 ± 10.8 | 16.6 ± 11.4 | 0.711 | −0.048 | 0.060 |
| 4 | 13.8 ± 9.6 | 12.1 ± 8.6 | 0.166 | 0.186 | 0.204 |
| 5 | 11.5 ± 7.1 | 10.7 ± 7.3 | 0.510 | 0.120 | 0.112 |
| 6 | 10.0 ± 6.8 | 10.4 ± 6.6 | 0.636 | −0.055 | 0.063 |
| 7 | 7.7 ± 7.0 | 7.5 ± 6.2 | 0.833 | 0.030 | 0.054 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the author. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Promsri, A. Modulation of Lower-Limb Muscle Activity in Maintaining Unipedal Balance According to Surface Stability, Sway Direction, and Leg Dominance. Sports 2022, 10, 155. https://doi.org/10.3390/sports10100155
Promsri A. Modulation of Lower-Limb Muscle Activity in Maintaining Unipedal Balance According to Surface Stability, Sway Direction, and Leg Dominance. Sports. 2022; 10(10):155. https://doi.org/10.3390/sports10100155
Chicago/Turabian StylePromsri, Arunee. 2022. "Modulation of Lower-Limb Muscle Activity in Maintaining Unipedal Balance According to Surface Stability, Sway Direction, and Leg Dominance" Sports 10, no. 10: 155. https://doi.org/10.3390/sports10100155
APA StylePromsri, A. (2022). Modulation of Lower-Limb Muscle Activity in Maintaining Unipedal Balance According to Surface Stability, Sway Direction, and Leg Dominance. Sports, 10(10), 155. https://doi.org/10.3390/sports10100155