

Leg Dominance—Surface Stability Interaction: Effects on Postural Control Assessed by Smartphone-Based Accelerometry

Abstract
1. Introduction
2. Materials and Methods
2.1. Participants
2.2. Equipment
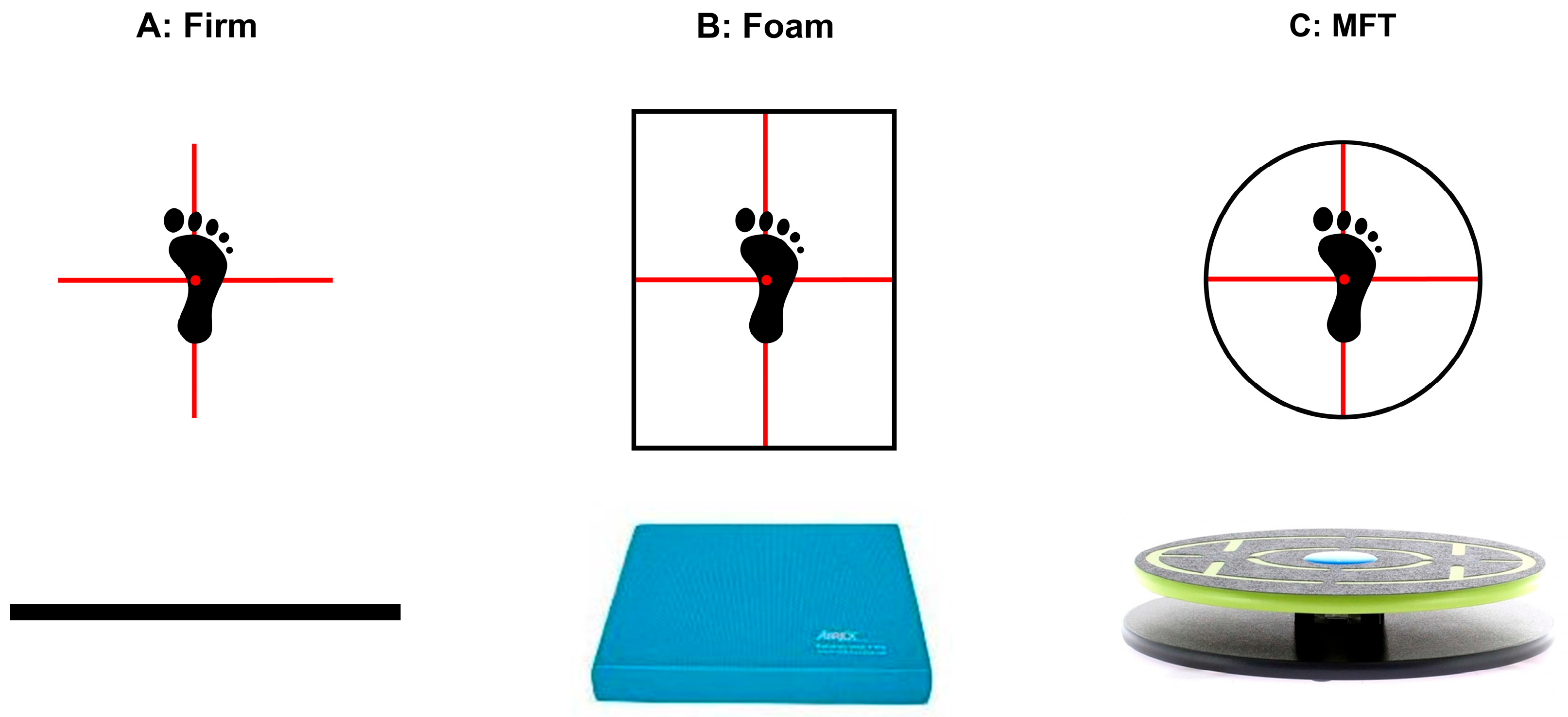
2.3. Experimental Procedure
2.4. Data Analysis
2.5. Acceleration-Based Variable Computation
2.6. Statistical Analysis
3. Results
3.1. Leg Dominance Effects
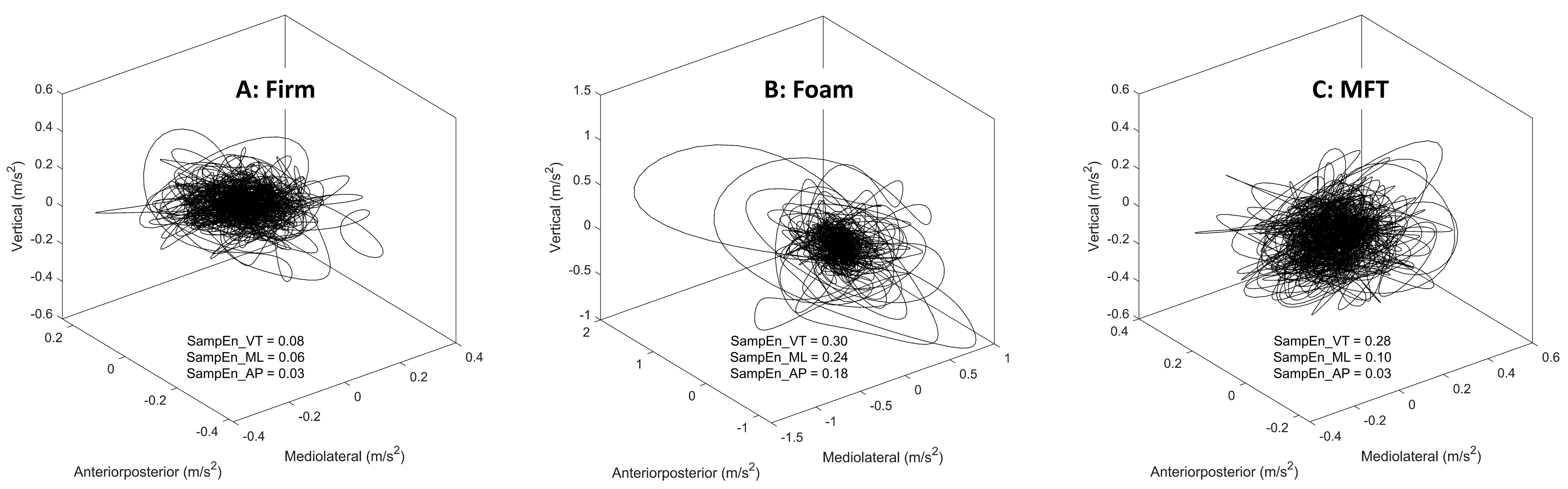
3.2. Surface Stability Effects
3.3. Leg Dominance and Surface Stability Interaction Effects
4. Discussion
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Kapreli, E.; Athanasopoulos, S.; Papathanasiou, M.; Van Hecke, P.; Strimpakos, N.; Gouliamos, A.; Peeters, R.; Sunaert, S. Lateralization of Brain Activity during Lower Limb Joints Movement. An FMRI Study. Neuroimage 2006, 32, 1709–1721. [Google Scholar] [CrossRef] [PubMed]
- Brophy, R.; Silvers, H.J.; Gonzales, T.; Mandelbaum, B.R.; Holly, M.; Silvers, J.; Mandelbaum, B.R. Gender Influences: The Role of Leg Dominance in ACL Injury among Soccer Players. Br. J. Sports Med. 2010, 44, 694–697. [Google Scholar] [CrossRef] [PubMed]
- Ruedl, G.; Webhofer, M.; Helle, K.; Strobl, M.; Schranz, A.; Fink, C.; Gatterer, H.; Burtscher, M. Leg Dominance Is a Risk Factor for Noncontact Anterior Cruciate Ligament Injuries in Female Recreational Skiers. Am. J. Sports Med. 2012, 40, 1269–1273. [Google Scholar] [CrossRef] [PubMed]
- Murphy, D.F.; Connolly, D.A.J.; Beynnon, B.D. Risk Factors for Lower Extremity Injury: A Review of the Literature. Br. J. Sports Med. 2003, 37, 13–29. [Google Scholar] [CrossRef]
- Shumway-Cook, A.; Woollacott, M.H. Motor Control: Translating Research into Clinical Practice; Wolters Kluwer: Philadelphia, PA, USA, 2017; ISBN 9781496302632. [Google Scholar]
- Schorderet, C.; Hilfiker, R.; Allet, L. The Role of the Dominant Leg While Assessing Balance Performance. A Systematic Review and Meta-Analysis. Gait Posture 2021, 84, 66–78. [Google Scholar] [CrossRef]
- Paillard, T.; Noé, F. Does Monopedal Postural Balance Differ between the Dominant Leg and the Non-Dominant Leg? A Review. Hum. Mov. Sci. 2020, 74, 102686. [Google Scholar] [CrossRef]
- Promsri, A.; Haid, T.; Federolf, P. How Does Lower Limb Dominance Influence Postural Control Movements during Single Leg Stance? Hum. Mov. Sci. 2018, 58, 165–174. [Google Scholar] [CrossRef]
- Promsri, A.; Longo, A.; Haid, T.; Doix, A.-C.M.; Federolf, P. Leg Dominance as a Risk Factor for Lower-Limb Injuries in Downhill Skiers—A Pilot Study into Possible Mechanisms. Int. J. Environ. Res. Public Health 2019, 16, 3399. [Google Scholar] [CrossRef]
- Promsri, A.; Haid, T.; Werner, I.; Federolf, P. Leg Dominance Effects on Postural Control When Performing Challenging Balance Exercises. Brain Sci. 2020, 10, 128. [Google Scholar] [CrossRef]
- Promsri, A.; Haid, T.; Federolf, P. Complexity, Composition, and Control of Bipedal Balancing Movements as the Postural Control System Adapts to Unstable Support Surfaces or Altered Feet Positions. Neuroscience 2020, 430, 113–124. [Google Scholar] [CrossRef]
- Promsri, A.; Mohr, M.; Federolf, P. Principal Postural Acceleration and Myoelectric Activity: Interrelationship and Relevance for Characterizing Neuromuscular Function in Postural Control. Hum. Mov. Sci. 2021, 77, 102792. [Google Scholar] [CrossRef]
- Florenes, T.W.; Bere, T.; Nordsletten, L.; Heir, S.; Bahr, R. Injuries among Male and Female World Cup Alpine Skiers. Br. J. Sports Med. 2009, 43, 973–978. [Google Scholar] [CrossRef]
- Winter, D.A.; Patla, A.E.; Rietdyk, S.; Ishac, M.G. Ankle Muscle Stiffness in the Control of Balance during Quiet Standing. J. Neurophysiol. 2001, 85, 2630–2633. [Google Scholar] [CrossRef]
- Cavanaugh, J.T.; Guskiewicz, K.M.; Stergiou, N. A Nonlinear Dynamic Approach for Evaluating Postural Control: New Directions for the Management of Sport-Related Cerebral Concussion. Sport. Med. 2005, 35, 935–950. [Google Scholar] [CrossRef] [PubMed]
- Ivanenko, Y.; Gurfinkel, V.S. Human Postural Control. Front. Neurosci. 2018, 12, 171. [Google Scholar] [CrossRef]
- Rhea, C.K.; Silver, T.A.; Hong, S.L.; Ryu, J.H.; Studenka, B.E.; Hughes, C.M.L.; Haddad, J.M. Noise and Complexity in Human Postural Control: Interpreting the Different Estimations of Entropy. PLoS ONE 2011, 6, e17696. [Google Scholar] [CrossRef] [PubMed]
- Donker, S.F.; Roerdink, M.; Greven, A.J.; Beek, P.J. Regularity of Center-of-Pressure Trajectories Depends on the Amount of Attention Invested in Postural Control. Exp. Brain Res. 2007, 181, 1–11. [Google Scholar] [CrossRef] [PubMed]
- Lubetzky, A.V.; Harel, D.; Lubetzky, E. On the Effects of Signal Processing on Sample Entropy for Postural Control. PLoS ONE 2018, 13, e0193460. [Google Scholar] [CrossRef] [PubMed]
- Federolf, P.; Zandiyeh, P.; von Tscharner, V. Time Scale Dependence of the Center of Pressure Entropy: What Characteristics of the Neuromuscular Postural Control System Influence Stabilographic Entropic Half-Life? Exp. Brain Res. 2015, 233, 3507–3515. [Google Scholar] [CrossRef]
- Haid, T.; Federolf, P. Human Postural Control: Assessment of Two Alternative Interpretations of Center of Pressure Sample Entropy through a Principal Component Factorization of Whole-Body Kinematics. Entropy 2018, 20, 30. [Google Scholar] [CrossRef]
- Pantall, A.; Del Din, S.; Rochester, L. Longitudinal Changes over Thirty-Six Months in Postural Control Dynamics and Cognitive Function in People with Parkinson’s Disease. Gait Posture 2018, 62, 468–474. [Google Scholar] [CrossRef] [PubMed]
- Hansen, C.; Wei, Q.; Shieh, J.-S.; Fourcade, P.; Isableu, B.; Majed, L. Sample Entropy, Univariate, and Multivariate Multi-Scale Entropy in Comparison with Classical Postural Sway Parameters in Young Healthy Adults. Front. Hum. Neurosci. 2017, 11, 206. [Google Scholar] [CrossRef] [PubMed]
- Buckley, C.; Alcock, L.; McArdle, R.; Ur Rehman, R.Z.; Del Din, S.; Mazzà, C.; Yarnall, A.J.; Rochester, L. The Role of Movement Analysis in Diagnosing and Monitoring Neurodegenerative Conditions: Insights from Gait and Postural Control. Brain Sci. 2019, 9, 34. [Google Scholar] [CrossRef] [PubMed]
- Pinho, A.S.; Salazar, A.P.; Hennig, E.M.; Spessato, B.C.; Domingo, A.; Pagnussat, A.S. Can We Rely on Mobile Devices and Other Gadgets to Assess the Postural Balance of Healthy Individuals? A Systematic Review. Sensors 2019, 19, 2972. [Google Scholar] [CrossRef] [PubMed]
- Roeing, K.L.; Hsieh, K.L.; Sosnoff, J.J. A Systematic Review of Balance and Fall Risk Assessments with Mobile Phone Technology. Arch. Gerontol. Geriatr. 2017, 73, 222–226. [Google Scholar] [CrossRef]
- Abou, L.; Wong, E.; Peters, J.; Dossou, M.S.; Sosnoff, J.J.; Rice, L.A. Smartphone Applications to Assess Gait and Postural Control in People with Multiple Sclerosis: A Systematic Review. Mult. Scler. Relat. Disord. 2021, 51, 102943. [Google Scholar] [CrossRef]
- Ghislieri, M.; Gastaldi, L.; Pastorelli, S.; Tadano, S.; Agostini, V. Wearable Inertial Sensors to Assess Standing Balance: A Systematic Review. Sensors 2019, 19, 4075. [Google Scholar] [CrossRef]
- Ozinga, S.J.; Machado, A.G.; Miller Koop, M.; Rosenfeldt, A.B.; Alberts, J.L. Objective Assessment of Postural Stability in Parkinson’s Disease Using Mobile Technology. Mov. Disord. 2015, 30, 1214–1221. [Google Scholar] [CrossRef]
- Hsieh, K.L.; Sosnoff, J.J. Smartphone Accelerometry to Assess Postural Control in Individuals with Multiple Sclerosis. Gait Posture 2021, 84, 114–119. [Google Scholar] [CrossRef] [PubMed]
- Kang, H. Sample Size Determination and Power Analysis Using the G*Power Software. J. Educ. Eval. Health Prof. 2021, 18, 17. [Google Scholar] [CrossRef]
- Saha, A.; Sharma, T.; Batra, H.; Jain, A.; Pal, V. Human Action Recognition Using Smartphone Sensors. In Proceedings of the 2020 International Conference on Computational Performance Evaluation, ComPE 2020, Shillong, India, 2–4 July 2020; Institute of Electrical and Electronics Engineers Inc.: New York, NY, USA, 2020; pp. 238–243. [Google Scholar]
- Kosse, N.M.; Caljouw, S.; Vervoort, D.; Vuillerme, N.; Lamoth, C.J.C.C. Validity and Reliability of Gait and Postural Control Analysis Using the Tri-Axial Accelerometer of the IPod Touch. Ann. Biomed. Eng. 2015, 43, 1935–1946. [Google Scholar] [CrossRef]
- Estrada, L.; Torres, A.; Sarlabous, L.; Jané, R. Influence of Parameter Selection in Fixed Sample Entropy of Surface Diaphragm Electromyography for Estimating Respiratory Activity. Entropy 2017, 19, 460. [Google Scholar] [CrossRef]
- Richman, J.S.; Moorman, J.R. Physiological Time-Series Analysis Using Approximate Entropy and Sample Entropy. Am. J. Physiol. Circ. Physiol. 2000, 278, H2039–H2049. [Google Scholar] [CrossRef] [PubMed]
- Tochigi, Y.; Segal, N.A.; Vaseenon, T.; Brown, T.D. Entropy Analysis of Tri-Axial Leg Acceleration Signal Waveforms for Measurement of Decrease of Physiological Variability in Human Gait. J. Orthop. Res. 2012, 30, 897–904. [Google Scholar] [CrossRef] [PubMed]
- Ramdani, S.; Seigle, B.; Lagarde, J.; Bouchara, F.; Louis Bernard, P.; Bernard, P.L. On the Use of Sample Entropy to Analyze Human Postural Sway Data. Med. Eng. Phys. 2009, 31, 1023–1031. [Google Scholar] [CrossRef]
- Paillard, T.; Noé, F. Techniques and Methods for Testing the Postural Function in Healthy and Pathological Subjects. Biomed Res. Int. 2015, 2015, 891390. [Google Scholar] [CrossRef] [PubMed]
- Holm, S. A Simple Sequentially Rejective Bonferroni Test Procedure. Scand. J. Stat. 1979, 6, 65–70. [Google Scholar] [CrossRef]
- Cimadoro, G.; Paizis, C.; Alberti, G.; Babault, N. Effects of Different Unstable Supports on EMG Activity and Balance. Neurosci. Lett. 2013, 548, 228–232. [Google Scholar] [CrossRef]
- Promsri, A. Modulation of Bilateral Lower-Limb Muscle Coordination When Performing Increasingly Challenging Balance Exercises. Neurosci. Lett. 2022, 767, 136299. [Google Scholar] [CrossRef]
- Croft, J.L.; Von Tscharner, V.; Zernicke, R.F. Movement Variability and Muscle Activity Relative to Center of Pressure during Unipedal Stance on Solid and Compliant Surfaces. Mot. Control 2008, 12, 283–295. [Google Scholar] [CrossRef]
- Shumway-Cook, A.; Horak, F.B. Assessing the Influence of Sensory Interaction on Balance. Phys. Ther. 1986, 66, 1548–1550. [Google Scholar] [CrossRef] [PubMed]
- van Dieën, J.H.; van Leeuwen, M.; Faber, G.S. Learning to Balance on One Leg: Motor Strategy and Sensory Weighting. J. Neurophysiol. 2015, 114, 2967–2982. [Google Scholar] [CrossRef] [PubMed]
- Davis, J.R.; Horslen, B.C.; Nishikawa, K.; Fukushima, K.; Chua, R.; Inglis, J.T.; Carpenter, M.G. Human Proprioceptive Adaptations during States of Height-Induced Fear and Anxiety. J. Neurophysiol. 2011, 106, 3082–3090. [Google Scholar] [CrossRef] [PubMed]
- Proske, U.; Gandevia, S.C. The Proprioceptive Senses: Their Roles in Signaling Body Shape, Body Position and Movement, and Muscle Force. Physiol. Rev. 2012, 92, 1651–1697. [Google Scholar] [CrossRef] [PubMed]
- Waddington, G.; Seward, H.; Wrigley, T.; Lacey, N.; Adams, R. Comparing Wobble Board and Jump-Landing Training Effects on Knee and Ankle Movement Discrimination. J. Sci. Med. Sport 2000, 3, 449–459. [Google Scholar] [CrossRef]
- De Ridder, R.; Willems, T.; De Mits, S.; Vanrenterghem, J.; Roosen, P. Foot Orientation Affects Muscle Activation Levels of Ankle Stabilizers in a Single-Legged Balance Board Protocol. Hum. Mov. Sci. 2014, 33, 419–431. [Google Scholar] [CrossRef] [PubMed]
- Clark, V.M.; Burden, A.M. A 4-Week Wobble Board Exercise Programme Improved Muscle Onset Latency and Perceived Stability in Individuals with a Functionally Unstable Ankle. Phys. Ther. Sport 2005, 6, 181–187. [Google Scholar] [CrossRef]
- Horslen, B.C.; Murnaghan, C.D.; Inglis, J.T.; Chua, R.; Carpenter, M.G. Effects of Postural Threat on Spinal Stretch Reflexes: Evidence for Increased Muscle Spindle Sensitivity? J. Neurophysiol. 2013, 110, 899–906. [Google Scholar] [CrossRef]




{kind=link}
{kind=link}
{kind=link}
| Total (n = 22) | Male (n = 9) | Female (n = 13) | p Value | |
|---|---|---|---|---|
| Age (years) | 21.5 ± 0.6 | 21.3 ± 0.5 | 21.6 ± 0.6 | 0.282 |
| Weight (kg) | 58.2 ± 9.9 | 67.1 ± 5.8 | 52.0 ± 7.1 | <0.001 * |
| Height (cm) | 164.7 ± 9.6 | 174.6 ± 6.2 | 157.9 ± 3.7 | <0.001 * |
| Body mass index (kg/m2) | 21.2 ± 2.7 | 22.1 ± 1.6 | 20.6 ± 3.1 | 0.213 |
| Variables | DO | ND | p Value | ηp2 | 1 − β |
|---|---|---|---|---|---|
| SampEn_VT | 0.32 ± 0.03 | 0.19 ± 0.03 | <0.001 * | 0.802 | 1 |
| SampEn_ML | 0.29 ± 0.02 | 0.16 ± 0.03 | <0.001 * | 0.751 | 1 |
| SampEn_AP | 0.19 ± 0.01 | 0.06 ± 0.01 | <0.001 * | 0.896 | 1 |
| RMS_VT | 0.12 ± 0.01 | 0.13 ± 0.02 | 0.290 | 0.053 | 0.179 |
| RMS_ML | 0.11 ± 0.01 | 0.12 ± 0.01 | 0.073 | 0.145 | 0.438 |
| RMS_AP | 0.07 ± 0.00 | 0.08 ± 0.01 | 0.497 | 0.022 | 0.101 |
| 95% ellipse area | 0.17 ± 0.02 | 0.23 ± 0.07 | 0.225 | 0.069 | 0.223 |
| Variables | Firm | Foam | MFT | p Value a | p Value b | p Value c | ηp2 | 1 − β |
|---|---|---|---|---|---|---|---|---|
| SampEn_VT | 0.28 ± 0.02 | 0.29 ± 0.03 | 0.18 ± 0.03 | 1.000 | <0.001 * | 0.001 * | 0.534 | 0.983 |
| SampEn_ML | 0.30 ± 0.02 | 0.25 ± 0.04 | 0.12 ± 0.02 | 0.395 | <0.001 * | 0.001 * | 0.826 | 1 |
| SampEn_AP | 0.24 ± 0.01 | 0.10 ± 0.02 | 0.03 ± 0.01 | <0.001 * | <0.001 * | 0.001 * | 0.919 | 1 |
| RMS_VT | 0.09 ± 0.01 | 0.17 ± 0.01 | 0.12 ± 0.01 | <0.001 * | 0.012 | 0.001 * | 0.881 | 1 |
| RMS_ML | 0.09 ± 0.01 | 0.16 ± 0.02 | 0.10 ± 0.01 | <0.001 * | 0.097 | 0.002 * | 0.672 | 1 |
| RMS_AP | 0.07 ± 0.01 | 0.10 ± 0.01 | 0.06 ± 0.01 | <0.001 * | 1.000 | <0.001 * | 0.669 | 1 |
| 95% ellipse area | 0.14 ± 0.04 | 0.34 ± 0.08 | 0.13 ± 0.02 | 0.001 * | 1.000 | 0.033 | 0.588 | 0.996 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Promsri, A.; Bangkomdet, K.; Jindatham, I.; Jenchang, T. Leg Dominance—Surface Stability Interaction: Effects on Postural Control Assessed by Smartphone-Based Accelerometry. Sports 2023, 11, 75. https://doi.org/10.3390/sports11040075
Promsri A, Bangkomdet K, Jindatham I, Jenchang T. Leg Dominance—Surface Stability Interaction: Effects on Postural Control Assessed by Smartphone-Based Accelerometry. Sports. 2023; 11(4):75. https://doi.org/10.3390/sports11040075
Chicago/Turabian StylePromsri, Arunee, Kotchakorn Bangkomdet, Issariya Jindatham, and Thananya Jenchang. 2023. "Leg Dominance—Surface Stability Interaction: Effects on Postural Control Assessed by Smartphone-Based Accelerometry" Sports 11, no. 4: 75. https://doi.org/10.3390/sports11040075
APA StylePromsri, A., Bangkomdet, K., Jindatham, I., & Jenchang, T. (2023). Leg Dominance—Surface Stability Interaction: Effects on Postural Control Assessed by Smartphone-Based Accelerometry. Sports, 11(4), 75. https://doi.org/10.3390/sports11040075