
Researching a Moving Target Detection Method Based on Magnetic Flux Induction Technology

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Methods
2.1. Magnetic Flux Density of the Magnetic Dipole at Any Point in Space
2.2. Expression Derivation of Magnetic Flux in the Rectangular Coil at a Certain Time
2.2.1. The Direction of Magnetic Moment in Positive X Direction
2.2.2. The Magnetic Moment in Positive Y Direction
2.2.3. The Magnetic Moment in Positive Z Direction
3. Simulation Calculation
3.1. Influence of the Target’s Magnetic Moment Direction on Induced Electromotive Force
3.2. Influence of the Target’s Motion Parameters on Induced Electromotive Force
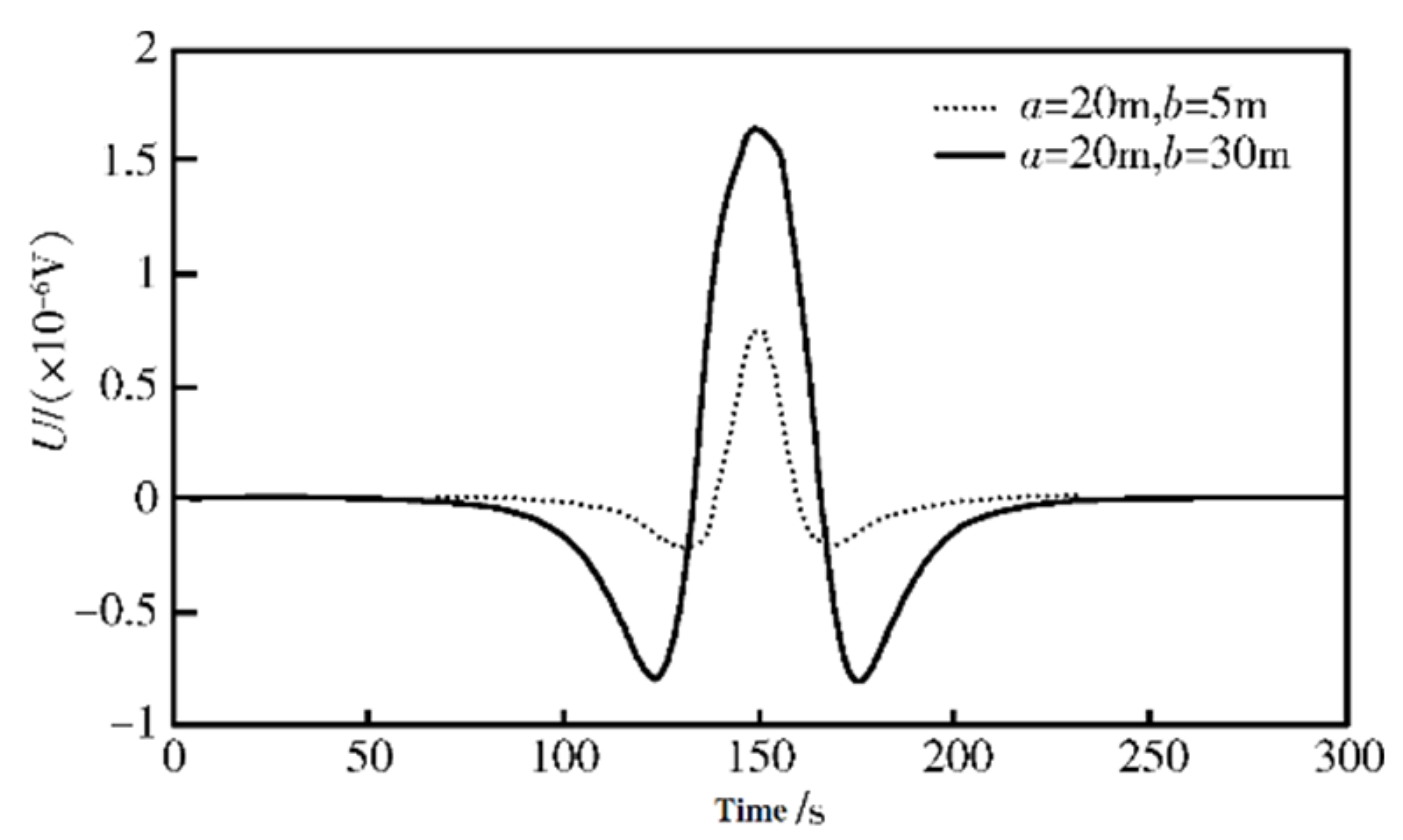
3.3. Influence of the Coil’s Size Parameters on Induced Electromotive Force
4. Test Verification
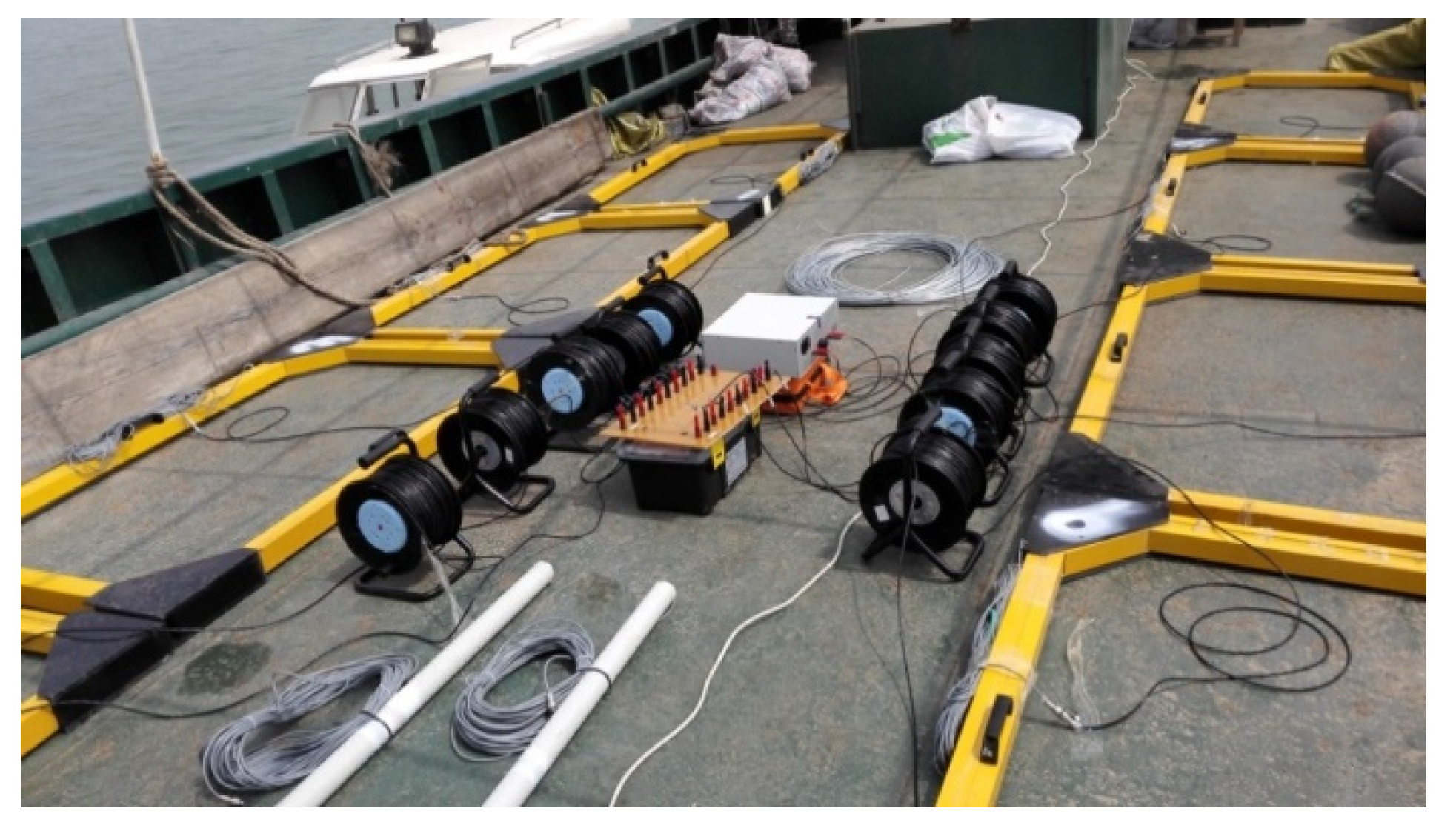
4.1. The Detection Coil
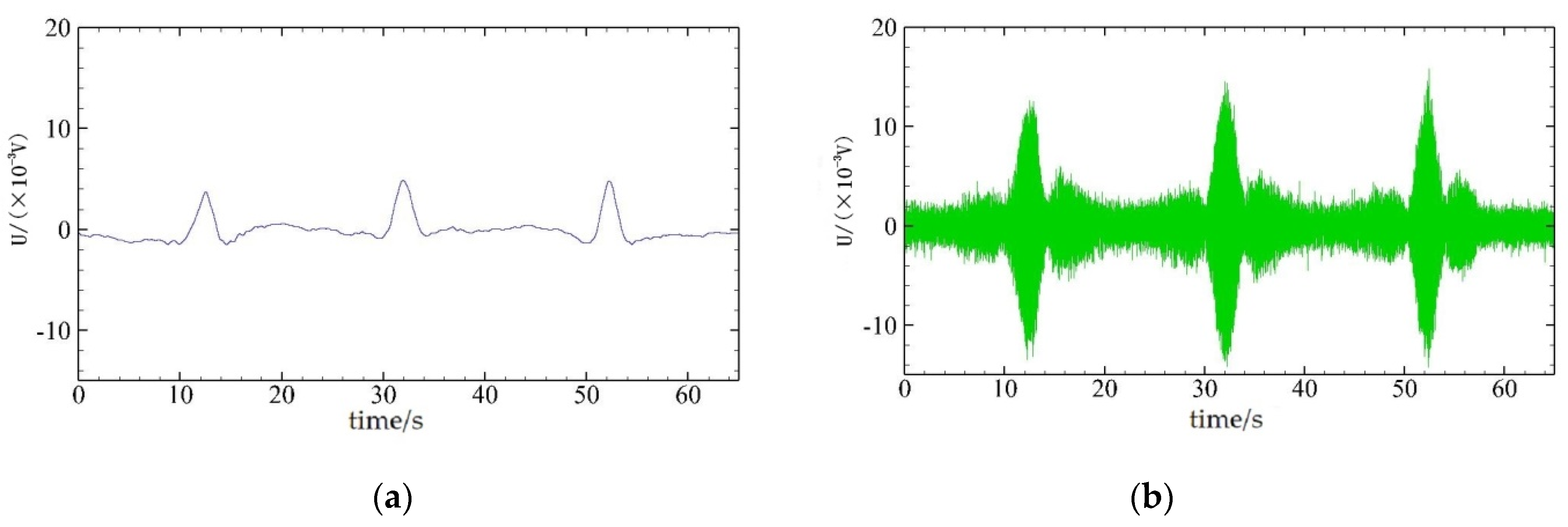
4.2. Result Analysis of the Extracted Magnetic Flux Signals of the Wooden Ship
4.3. Result Analysis of the Extracted Magnetic Flux Signal of the Speedboat
4.4. Result Analysis of the Extracted Magnetic Flux Signal of the Rubber Boat
5. Conclusions
- (1)
- The induced electromotive force increases with the decrease in the target’s height. There is a power exponential relationship between the peak value of the induced electromotive force and the height.
- (2)
- The induced electromotive force increases with the increase in the target’s velocity. There is a linear relationship between the peak value of the induced electromotive force and the velocity.
- (3)
- The induced electromotive force increases with the increase in the detection coil’s size within a certain range.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Kohler, M.M. The Joint Force Maritime Component Command and the Marine Corps: Integrate to Win the Black Sea Fight. J. Adv. Mil. Stud. 2021, 11, 88–105. [Google Scholar] [CrossRef]
- Li, J.C.; Zhou, Z.C. An Analysis of the Decline of British Overseas Military Bases. J. Liaoning Univ. (Philos. Soc. Sci.) 2020, 48, 152–158. [Google Scholar]
- Fan, X.Y.; He, X.Y.; Yang, L. Research on application of ocean remote sensing in military marine environment guarantee. J. Nav. Univ. Eng. 2020, 17, 39–42. [Google Scholar]
- Diamant, R.; Kipnis, D.; Bigal, E. An Active Acoustic Track-Before-Detect Approach for Finding Underwater Mobile Targets. IEEE J. Sel. Top. Signal Process. 2019, 13, 104–119. [Google Scholar] [CrossRef]
- Wang, X.M.; Liu, Z.P.; Sun, J.C. Sonar Image Detection Algorithm Based on Two-Phase Manifold Partner Clustering. J. Harbin Inst. Technol. 2015, 4, 105–114. [Google Scholar]
- Venturino, L.; Grossi, E.; Lops, M. Track-Before-Detect for Multiframe Detection with Censored Observations. IEEE Trans. Aerosp. Electron. Syst. 2014, 50, 2032–2046. [Google Scholar]
- Zhu, J.J.; Yu, S.; Gao, L. Saliency-Based Diver Target Detection and Localization Method. Math. Probl. Eng. 2020, 2020, 3186834. [Google Scholar] [CrossRef]
- Zhao, Y.L.; Yan, P.; Li, X.; Tan, B.; Wei, P. Research on the equivalent relationship of torpedo penetrated by underwater supercavitation projectile based on energy consumption model. J. Phys. Conf. Ser. 2020, 1507, 032059. [Google Scholar] [CrossRef]
- Jawahar, A. More Reliable and Automated Target Localisation when Tracking Low Signature Targets in Areas with Heavy Shipping. Artif. Intell. Syst. Mach. Learn. 2016, 8, 299–303. [Google Scholar]
- Egozi, A. Israeli underwater capabilities at the cutting edge of technology. Asia-Pac. Def. Rep. 2018, 44, 42–43. [Google Scholar]
- Chalcogens. Underwater defense: New ways to protect divers in the deep. NewsRx Health Sci. 2017, 283–285. [Google Scholar]
- Jawahar, A. Target Localization and Mathematical Modelling for Maritime Based Sonar Applications Using Kalman Filter. Autom. Auton. Syst. 2016, 8, 287–298. [Google Scholar]
- Udovydchenkov, I.A.; Stephen, R.A.; Howe, B.M. Bottom interacting sound at 50 km range in a deep ocean environment. J. Acoust. Soc. Am. 2012, 132, 2224–2231. [Google Scholar] [CrossRef] [Green Version]
- Moore, P.W.; Lane, D.M.; Capus, C. Bio-inspired wideband sonar signals based on observations of the bottlenose dolphin (Tursiops truncatus). J. Acoust. Soc. Am. 2007, 121, 594–604. [Google Scholar]
- Ferla, C.; Porter, M.B. Receiver depth selection for passive sonar systems. IEEE J. Ocean. Eng. A J. Devoted Appl. Electr. Electron. Eng. Ocean. Environ. 1991, 16, 267–278. [Google Scholar] [CrossRef]
- Salem, A.; Ushijima, K. Automatic detection of UXO from airborne magnetic data using a neural network. Subsurf. Sens. Technol. Appfications 2001, 2, 191–213. [Google Scholar] [CrossRef]
- Chen, J.J.; Yi, Z.; Meng, L.F. Multi-dipole discrimination technology based on Euler inverse method. Spacecr. Environ. Eng. 2013, 30, 401–406. [Google Scholar]
- Tang, J.F.; Gong, S.G.; Wang, J.G. Target Positioning and Parameter Estimation Based on Magnetic Dipole Model. Acta Electron. Sin. 2002, 30, 614–616. [Google Scholar]
- Zhang, C.Y.; Xiao, C.H.; Gao, J.J. Experiment Research of Magnetic Dipole Model Applicability for a Magnetic Object. J. Basic Sci. Eng. 2010, 18, 862–868. [Google Scholar]
- Takayuki, I.; Akihiro, S.; Masaharu, K. Magnetic dipole signal detection and location using subspace method. Electron. Commun. Jpn. 2002, 85, 23–34. [Google Scholar]
- Ren, L.P.; Zhao, J.S.; Hou, S.X. The Magnetic Field Space Distribution Pattern of Magnetic Diples. Hydrogr. Surv. Charting 2002, 22, 18–21. [Google Scholar]
- Hsung, T.C.; Lun, D.P.K.; Siu, W.C. Denoising by singularity detection. IEEE Trans. Signal Proc. 1999, 47, 3139–3144. [Google Scholar] [CrossRef]
- Xu, Y.S.; Weaver, J.B.; Healy, D.M. Wavelet transform domain filters: A spatially selective noise filtration technique. IEEE Trans. Image Proc. 1994, 3, 747–758. [Google Scholar]
- Mallat, S. A theory for multiresolution signal decomposition: The wavelet representation. IEEE Trans. Pattern Anal Mach. Intel. 1989, 11, 674–692. [Google Scholar] [CrossRef] [Green Version]
- Rioul, O.; Vetterli, M. Wavelets and signal processing. IEEE Signal Process. Mag. 1991, 8, 14–38. [Google Scholar] [CrossRef] [Green Version]











Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Xu, C.; Yang, L.; Huang, K.; Gao, Y.; Zhang, S.; Gao, Y.; Meng, L.; Xiao, Q.; Liu, C.; Wang, B.; et al. Researching a Moving Target Detection Method Based on Magnetic Flux Induction Technology. Metals 2021, 11, 1967. https://doi.org/10.3390/met11121967
Xu C, Yang L, Huang K, Gao Y, Zhang S, Gao Y, Meng L, Xiao Q, Liu C, Wang B, et al. Researching a Moving Target Detection Method Based on Magnetic Flux Induction Technology. Metals. 2021; 11(12):1967. https://doi.org/10.3390/met11121967
Chicago/Turabian StyleXu, Chaoqun, Li Yang, Kui Huang, Yang Gao, Shaohua Zhang, Yuting Gao, Lifei Meng, Qi Xiao, Chaobo Liu, Bin Wang, and et al. 2021. "Researching a Moving Target Detection Method Based on Magnetic Flux Induction Technology" Metals 11, no. 12: 1967. https://doi.org/10.3390/met11121967
APA StyleXu, C., Yang, L., Huang, K., Gao, Y., Zhang, S., Gao, Y., Meng, L., Xiao, Q., Liu, C., Wang, B., & Yi, Z. (2021). Researching a Moving Target Detection Method Based on Magnetic Flux Induction Technology. Metals, 11(12), 1967. https://doi.org/10.3390/met11121967