
The Fundamental Formulation for Inhomogeneous Inclusion Problems with the Equivalent Eigenstrain Principle



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Fundamentals of Homogenous Inclusion Mechanics
2.1. Hooke’s Law and the Compatibility Condition
2.2. Equilibrium Conditions
2.3. Solution for Homogenous Inclusion by Green’s Function Method
- (a)
- 3-D inclusion [13]:
- (b)
- 2-D inclusion:
3. General Formulation for Inhomogeneous Inclusion Problems
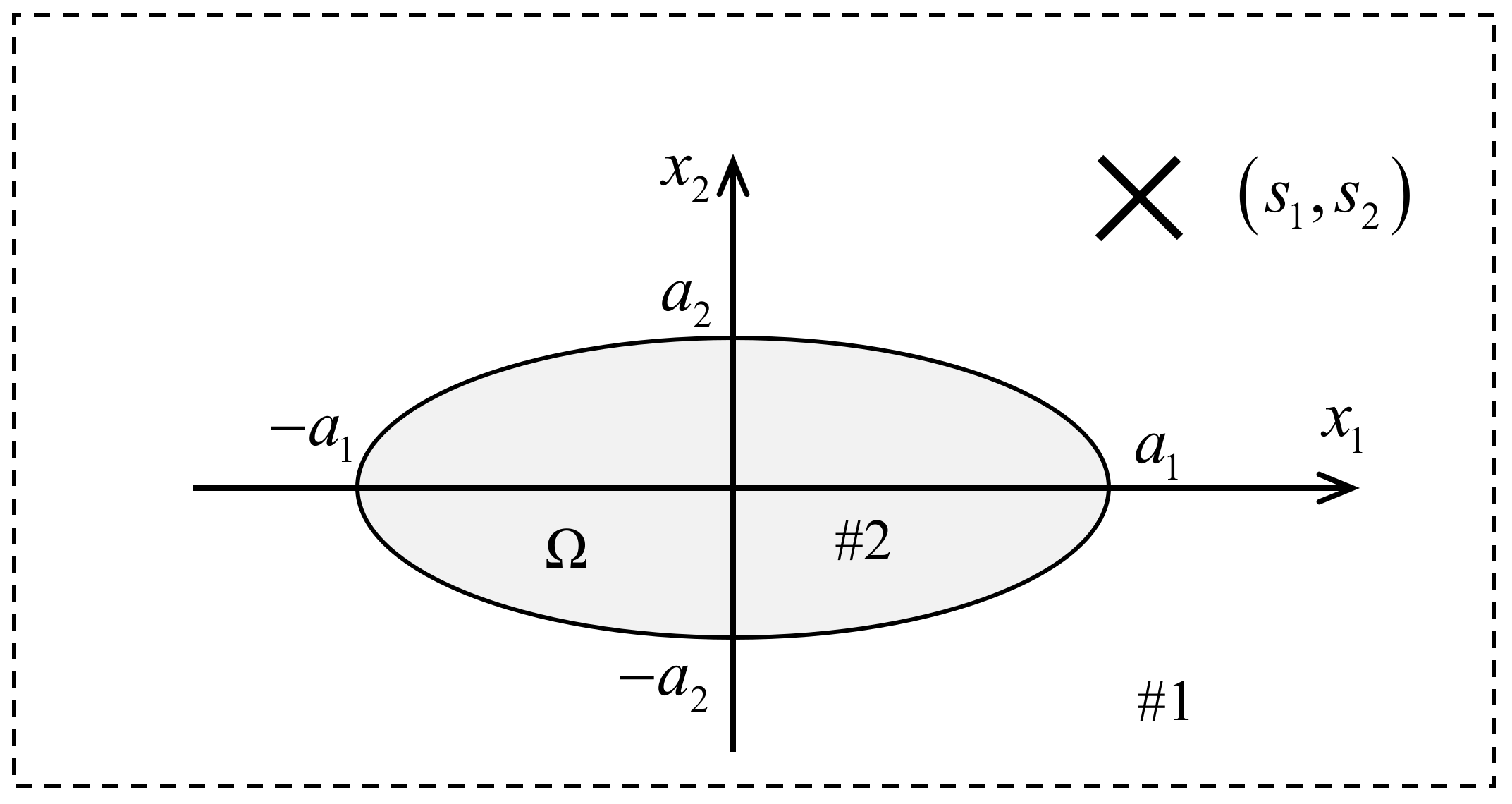
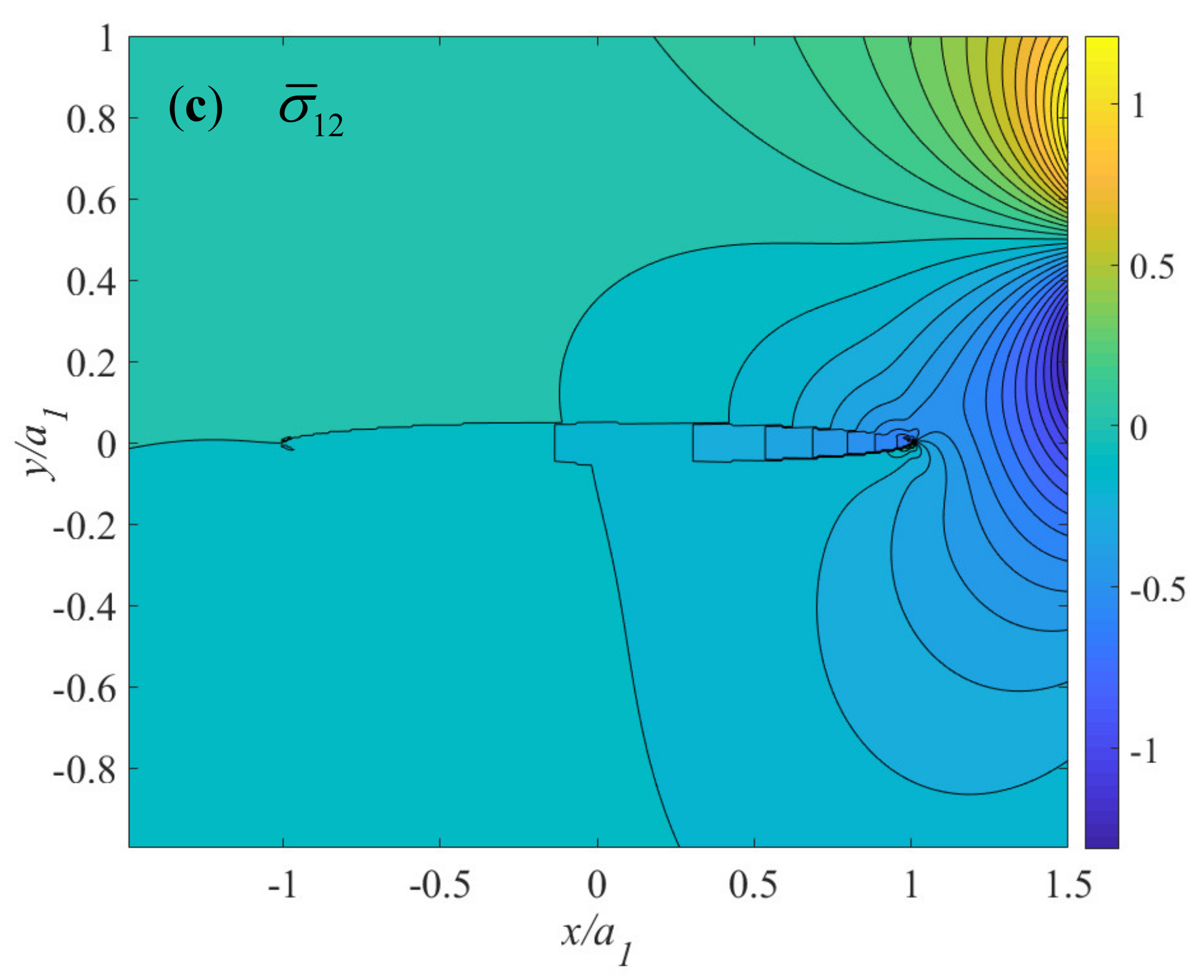
4. An Example: A Two-Dimensional Oblate Elliptical Inclusion Interacting with a Dilatational Eigenstrain Nucleus
5. Discussion of the Numerical Methods to Solve the Equivalent Eigenstrain
- (a)
- The method of Taylor’s series expansion of the equivalent eigenstrain (see, e.g., [50,53,54,55,61]). The unknown equivalent eigenstrain in each inclusion can be expressed into a Taylor series with respect to the local origin of the inclusion, and the singular integrals will automatically become an integrable one [50]. The coefficients of the series are then determined by inserting them into the governing equation, Equation (43), which is also called the “consistency condition”;
- (b)
- The discretized element method. To find a more accurate numerical solution, the inhomogeneous inclusions are discretized into small elements, each of which is treated as a homogenous inclusion with an initial eigenstrain plus an unknown equivalent eigenstrain, according to the equivalent inclusion method (see, e.g., [56,58,59,62]), and the equivalent eigenstrain in each element should satisfy the discretized consistency condition Equation (43);
- (c)
- The Fourier transform method (or the numerical FFT method). The Fourier transform method has an evident advantage in treating the convolutions that are involved in Equation (43), and it may even lead to analytical solutions for some special problems [13], and for multi-inclusion problems [63]. With this in mind, a rough description for solving Equation (43) by Fourier transform is given below. It will lead to a general expression for the solution.
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
Appendix A
References
- Inglis, C.E. Stresses in a plate due to the presence of cracks and sharp corners. Inst. Nav. Archit. Lond. 1913, 55, 219–230. [Google Scholar]
- Mindlin, R.D. Force at a point in the interior of a semi-infinite solid. Physics 1936, 7, 195–202. [Google Scholar] [CrossRef]
- Goodier, J.N. On the integration of the thermoelastic equations. Philos. Mag. 1937, 7, 1017–1032. [Google Scholar] [CrossRef]
- Mindlin, R.D.; Cheng, D.H. Thermoelastic stress in the semi-infinite solid. J. Appl. Phys. 1950, 21, 931–933. [Google Scholar] [CrossRef]
- Sen, B. Note on stresses produced by nuclei of thermo-elastic strain in a semi-infinite elastic solid. Q. Appl. Math. 1951, 8, 365–369. [Google Scholar] [CrossRef] [Green Version]
- Hardiman, N.J. Elliptic elastic inclusion in an infinite elastic plate. Q. J. Mech. Appl. Math. 1954, 7, 226–230. [Google Scholar] [CrossRef]
- Eshelby, J.D. The determination of the elastic field of an ellipsoidal inclusion, and related problems. Proc. R. Soc. Lond. A 1957, 241, 376–396. [Google Scholar]
- Eshelby, J.D. The elastic field outside an ellipsoidal inclusion. Proc. R. Soc. Lond. A 1959, 252, 561–569. [Google Scholar]
- Eshelby, J.D. Elastic inclusions and inhomogeneities. In Progress in Solid Mechanics; Sneddon, I.N., Hill, R., Eds.; North-Holland Publishing Company: Amsterdam, The Netherlands, 1961; Volume 2, pp. 89–140. [Google Scholar]
- Jaswon, M.A.; Bhargava, R.D. Two-dimensional elastic inclusion problems. Proc. Camb. Philos. Soc. 1961, 57, 669–680. [Google Scholar] [CrossRef]
- Mori, T.; Tanaka, K. Average stress in matrix and average elastic energy of materials with misfitting inclusions. Acta Metall. 1973, 21, 571–574. [Google Scholar] [CrossRef]
- Willis, J.R. Variational and related methods for the overall properties of composites. Adv. Appl. Mech. 1981, 21, 1–78. [Google Scholar]
- Mura, T. Micromechanics of Defects in Solids, 2nd ed.; Martinus Nijhoff: Dordrecht, The Netherlands, 1987. [Google Scholar]
- Ru, C.Q. Analytical solution for Eshelby’s problem of an inclusion of arbitrary shape in a plane or half-plane. J. Appl. Mech. 1999, 66, 315–322. [Google Scholar] [CrossRef]
- Ru, C.Q. Eshelby inclusion of arbitrary shape in an anisotropic plane or half plane. Acta Mech. 2003, 160, 219–234. [Google Scholar] [CrossRef]
- Gong, S.X.; Meguid, S.A. On the elastic fields of an elliptical inhomogeneity under plane deformation. Proc. R. Soc. Lond. A 1993, 443, 457–471. [Google Scholar]
- Zheng, Q.S.; Zhao, Z.H.; Du, D.X. Irreducible structure, symmetry and average of Eshelby’s tensor fields in isotropic elasticity. J. Mech. Phys. Solids 2006, 54, 368–383. [Google Scholar] [CrossRef]
- Andrianov, I.V.; Argatov, I.I.; Weichert, D. On the absence of the Eshelby property for slender non-ellipsoidal inhomogeneities. Proc. R. Soc. A 2008, 464, 1079–1088. [Google Scholar] [CrossRef]
- Zou, W.N.; He, Q.C.; Zheng, Q.S. General solution for Eshelby’s problem of 2D arbitrarily shaped piezoelectric inclusions. Int. J. Solids Struct. 2011, 48, 2681–2694. [Google Scholar] [CrossRef]
- Chen, C.Q.; Cui, J.Z.; Duan, H.L.; Feng, X.Q.; He, L.H.; Hu, G.K.; Huang, M.J.; Huo, Y.Z.; Ji, B.H.; Liu, B.; et al. Perspectives in mechanics of heterogeneous solids. Acta Mech. Solida Sin. 2011, 24, 1–26. [Google Scholar] [CrossRef] [Green Version]
- Chen, Q.D.; Xu, K.Y.; Pan, E. Inclusion of an arbitrary polygon with graded eigenstrain in an anisotropic piezoelectric half plane. Int. J. Solids Struct. 2014, 51, 53–62. [Google Scholar] [CrossRef] [Green Version]
- Mura, T. Inclusion problems. Appl. Mech. Rev. 1988, 41, 15–20. [Google Scholar] [CrossRef]
- Mura, T.; Shodja, H.M.; Hirose, Y. Inclusion problems. Appl. Mech. Rev. 1996, 49, S118–S127. [Google Scholar] [CrossRef]
- Zhou, K.; Hoh, H.J.; Wang, X.; Keer, L.M.; Pang, J.H.L.; Song, B.; Wang, Q.J. A review of recent works on inclusions. Mech. Mater. 2013, 60, 144–158. [Google Scholar] [CrossRef]
- Christensen, R.M. Mechanics of Composite Materials; Wiley: New York, NY, USA, 1979. [Google Scholar]
- Nemat-Nasser, S.; Hori, M. Micromechanics: Overall Properties of Heterogeneous Materials, 2nd ed.; Elsevier: Amsterdam, The Netherlands, 1999. [Google Scholar]
- Kachanov, M.; Sevostianov, I. Solid Mechanics and Its Applications; Springer Nature: Berlin/Heidelberg, Germany, 2018. [Google Scholar]
- Hutchinson, J.W. Bounds and self-consistent estimates for creep of polycrystalline materials. Proc. R. Soc. Lond. A 1976, 348, 101–127. [Google Scholar]
- Rahman, M. The isotropic ellipsoidal inclusion with a polynomial distribution of eigenstrain. J. Appl. Mech. 2002, 69, 593–601. [Google Scholar] [CrossRef]
- Kunin, I.A.; Sosnina, E.G. An ellipsoidal inhomogeneity in an elastic medium. Proc. Acad. Sci. USSR 1971, 199, 571–575. [Google Scholar]
- Kunin, I.A.; Sosnina, E.G. Stress concentration on an ellipsoidal inhomogeneity in an anisotropic elastic medium. Appl. Math. Mech. PMM 1973, 37, 306–315. [Google Scholar] [CrossRef]
- Zeller, R.; Dederichs, P.H. Elastic Constants of Polycrystals. Phys. Status Solidi B 1973, 55, 831–842. [Google Scholar] [CrossRef]
- Kunin, I.A. The Theory of Elastic Media with Microstructure II; Springer: Berlin/Heidelberg, Germany, 1983. [Google Scholar]
- Kanaun, S.K.; Levin, V.M. Self-Consistent Methods for Composites Volume 1: Static Problems; Springer: Berlin/Heidelberg, Germany, 2008. [Google Scholar]
- Kröner, E. Bounds for effective elastic moduli of disordered materials. J. Mech. Phys. Solids 1977, 25, 137–155. [Google Scholar] [CrossRef]
- Willis, J.R. Bounds and self-consistent estimates for the overall properties of anisotropic composites. J. Mech. Phys. Solids 1977, 25, 185–202. [Google Scholar] [CrossRef]
- Ma, L.F.; Korsunsky, A.M. The principle of equivalent eigenstrain for inhomogeneous inclusion problems. Int. J. Solids Struct. 2014, 51, 4477–4484. [Google Scholar] [CrossRef] [Green Version]
- Johnson, W.C.; Earmme, Y.Y.; Lee, J.K. Approximation of the strain field associated with an inhomogeneous precipitate, Part 1. J. Appl. Mech. 1980, 47, 775–780. [Google Scholar] [CrossRef]
- Johnson, W.C.; Earmme, Y.Y.; Lee, J.K. Approximation of the strain field associated with an inhomogeneous precipitate, Part 2. J. Appl. Mech. 1980, 47, 781–788. [Google Scholar] [CrossRef]
- Li, Q.; Anderson, P.M. A compact solution for the stress field from a cuboidal region with a uniform transformation strain. J. Elast. 2001, 64, 237–245. [Google Scholar] [CrossRef]
- Kuvshinov, B.N. Elastic and piezoelectric fields due to polyhedral inclusions. Int. J. Solids Struct. 2008, 45, 1352–1384. [Google Scholar] [CrossRef] [Green Version]
- Ma, L.F. Fundamental formulation for transformation toughening. Int. J. Solids Struct. 2010, 47, 3214–3220. [Google Scholar] [CrossRef] [Green Version]
- Avazmohammadi, R.; Hashemi, R.; Shodja, H.M.; Kargarnovin, M.H. Ellipsoidal domain with piecewise nonuniform eigenstrain field in one of joined isotropic half-spaces. J. Elast. 2010, 98, 117–140. [Google Scholar] [CrossRef]
- Ma, L.F.; Wang, B.; Korsunsky, A.M. Plane deformation of circular inhomogeneous inclusion problems with non-uniform symmetrical dilatational eigenstrain. Mater. Des. 2015, 86, 809–817. [Google Scholar] [CrossRef]
- Wang, X.; Chen, L.; Schiavone, P. Uniformity of stresses inside a non-elliptical inhomogeneity interacting with a mode III crack. Proc. R. Soc. Lond. A 2018, 474, 20180304. [Google Scholar] [CrossRef] [Green Version]
- Dai, M.; Hua, J.; Schiavone, P. Compressible liquid/gas inclusion with high initial pressure in plane deformation: Modified boundary conditions and related analytical solutions. Eur. J. Mech. A Solid 2020, 82, 104000. [Google Scholar] [CrossRef]
- Ma, L.F.; Qiu, Y.K.; Zhang, Y.M.; Li, G. General solution for inhomogeneous line inclusion with non-uniform eigenstrain. Arch. Appl. Mech. 2019, 89, 1723–1741. [Google Scholar] [CrossRef]
- Wang, B.; Zhao, W.; Ma, L.F. Analysis of a finite matrix with an inhomogeneous circular inclusion subjected to a non-uniform eigenstrain. Arch. Appl. Mech. 2020, 90, 945956. [Google Scholar] [CrossRef]
- Ma, L.F.; Tang, Z.Y.; Bian, Z.T.; Zhu, J.B.; Wiercigroch, M. Analytical solution for circular inhomogeneous inclusion problems with non-uniform axisymmetric eigenstrain distribution. Int. J. Mech. Sci. 2020, 194, 106213. [Google Scholar] [CrossRef]
- Moschovidis, Z.A.; Mura, T. Two-ellipsoidal inhomogeneities by the equivalent inclusion method. J. Appl. Mech. 1975, 42, 847–852. [Google Scholar] [CrossRef]
- Rodin, G.J.; Hwang, Y.L. On the problem of linear elasticity for an infinite region containing a finite number of non-intersecting spherical inhomogeneities. Int. J. Solids Struct. 1991, 27, 145–159. [Google Scholar] [CrossRef]
- Fond, C.; Riccardi, A.; Schirrer, R.; Montheillet, F. Mechanical interaction between spherical inhomogeneities: An assessment of a method based on the equivalent inclusion. Eur. J. Mech. A/Solids 2001, 20, 59–75. [Google Scholar] [CrossRef]
- Shodja, H.M.; Sarvestani, A.S. Elastic fields in double inhomogeneity by the equivalent inclusion method. J. Appl. Mech. 2001, 68, 3–10. [Google Scholar] [CrossRef]
- Shodja, H.M.; Rad, I.Z.; Soheilifard, R. Interacting cracks and ellipsoidal inhomogeneities by the equivalent inclusion method. J. Mech. Phys. Solids 2003, 51, 945–960. [Google Scholar] [CrossRef]
- Benedikt, B.; Lewis, M.; Rangaswamy, P. On elastic interactions between spherical inclusions by the equivalent inclusion method. Comput. Mater. Sci. 2006, 37, 380–392. [Google Scholar] [CrossRef]
- Zhou, K.; Keer, L.M.; Wang, Q.J. Semi-analytic solution for multiple interacting three-dimensional inhomogeneous inclusions of arbitrary shape in an infinite space. Int. J. Numer. Methods Eng. 2011, 87, 617–638. [Google Scholar] [CrossRef]
- Brisard, S.; Dormieux, L.; Sab, K. A variational form of the equivalent inclusion method for numerical homogenization. Int. J. Solids Struct. 2014, 51, 716–728. [Google Scholar] [CrossRef]
- Zhou, Q.; Jin, X.; Wang, Z.; Wang, J.; Keer, L.M.; Wang, Q. Numerical Implementation of the Equivalent Inclusion Method for 2D Arbitrarily Shaped Inhomogeneities. J. Elast. 2015, 118, 39–61. [Google Scholar] [CrossRef]
- Yang, W.; Zhou, Q.; Wang, J.; Khoo, B.C.; Phan-Thien, N. Equivalent inclusion method for arbitrary cavities or cracks in an elastic infinite/semi-infinite space. Int. J. Mech. Sci. 2021, 195, 106259. [Google Scholar] [CrossRef]
- Moulinec, H.; Suquet, P. A numerical method for computing the overall response of nonlinear composites with complex microstructure. Comput. Methods Appl. Mech. Eng. 1998, 157, 69–94. [Google Scholar] [CrossRef]
- Chen, F.C.; Young, K. Inclusions of arbitrary shape in an elastic medium. J. Math. Phys. 1977, 18, 1412–1416. [Google Scholar] [CrossRef]
- Nakasone, Y.; Nishiyama, H.; Nojiri, T. Numerical equivalent inclusion method: A new computational method for analyzing stress fields in and around inclusions of various shapes. Mater. Sci. Eng. A 2000, 285, 229–238. [Google Scholar] [CrossRef]
- Brisard, S.; Dormieux, L. Combining Galerkin approximation techniques with the principle of Hashin and Shtrikman to derive a new FFT-based numerical method for the homogenization of composites. Comput. Methods Appl. Mech. Eng. 2012, 217–220, 197–212. [Google Scholar] [CrossRef] [Green Version]
- Moulinec, H.; Suquet, P. A fast numerical method for computing the linear and nonlinear properties of composites. Comptes Rendus Acad. Sci. Paris II 1994, 318, 1417–1423. [Google Scholar]
- Eloh, K.S.; Jacquesa, A.; Berbenni, S. Development of a new consistent discrete green operator for FFT-based methods to solve heterogeneous problems with eigenstrains. Int. J. Plast. 2019, 116, 1–23. [Google Scholar] [CrossRef] [Green Version]


Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ma, L.; Korsunsky, A.M. The Fundamental Formulation for Inhomogeneous Inclusion Problems with the Equivalent Eigenstrain Principle. Metals 2022, 12, 582. https://doi.org/10.3390/met12040582
Ma L, Korsunsky AM. The Fundamental Formulation for Inhomogeneous Inclusion Problems with the Equivalent Eigenstrain Principle. Metals. 2022; 12(4):582. https://doi.org/10.3390/met12040582
Chicago/Turabian StyleMa, Lifeng, and Alexander M. Korsunsky. 2022. "The Fundamental Formulation for Inhomogeneous Inclusion Problems with the Equivalent Eigenstrain Principle" Metals 12, no. 4: 582. https://doi.org/10.3390/met12040582
APA StyleMa, L., & Korsunsky, A. M. (2022). The Fundamental Formulation for Inhomogeneous Inclusion Problems with the Equivalent Eigenstrain Principle. Metals, 12(4), 582. https://doi.org/10.3390/met12040582