1. Introduction
With continuously improving living standards, the quality requirements for indoor living environments have increased. A comfortable indoor thermal environment not only promotes a good quality of life but also increases work efficiency [
1,
2,
3,
4]. Therefore, assessing human thermal comfort is crucial to improving people’s lives and the energy efficiency of buildings. Hensen defined thermal comfort as a state wherein environmental temperature or human behavior need not be modified for comfort [
5]. The American Society of Heating, Refrigerating, and Air-Conditioning Engineers (ASHRAE) describes thermal comfort as a psychological state of satisfaction with the temperature of an environment [
6]. Thus, thermal comfort is not only a physical state but also a cognitive state and is influenced by several factors, such as physiology, space, and room temperature [
7]. It is an indispensable tool for the holistic assessment of a thermal environment [
8]. Conventionally, thermal discomfort is considered a subjective condition, whereas thermal sensation is considered an objective condition [
9]. Satisfaction in a thermal environment is a complex subjective response to several interactive and less distinct variables [
10]. In 1962, Macpherson proposed that the following six factors influence thermal sensation: four physical variables (air temperature, air velocity, relative humidity, and mean radiant temperature) and two personal variables (clothing insulation and metabolic rate) [
5]. The factors that influence thermal comfort can be used to determine energy consumption by systems in building environments; these factors are crucial to the sustainability of buildings [
11]. Thermal comfort is a key parameter for a healthy and efficient workplace [
12,
13].
Human comfort is closely related to the thermal environment of a room; thus, the heat transfer characteristics of the room are important and should be accurately evaluated. Thermal comfort is typically described using extended heat transfer models that account for environmental and human parameters. Van Hoof et al. [
14] reviewed thermal comfort models and their applications between the late 1990s and 2010. Van Hoof et al. [
15] reviewed modeling methods to simulate adaptation to thermal environments. Croitoru et al. [
16] discussed human physiological and mental models of adaptation to environmental temperature; they proposed the use of human thermoregulation models in combination with numerical methods of computational fluid dynamics (CFD) to effectively assess thermal comfort. Djongyang et al. [
17] reviewed mathematical models that account for conduction, convection, radiation, humidity, clothing insulation, and metabolism. Cheng et al. [
18] evaluated the thermal characteristics of an indoor environment by using human thermal comfort parameters and a CFD model, which represented the distribution patterns of macroscopic airflow and air temperature but neglected small-scale turbulence characteristics. Chen analyzed and compared experimental models, small-scale empirical models, large-scale empirical models, multizonal network models, a partitioning model, and a CFD model [
19]. Furthermore, the reliability and accuracy of turbulence models were improved and CFD models were integrated with building simulation models. Fu et al. [
20] reviewed various human thermoregulation models and noted the importance of initial indoor boundary parameters. All aforementioned studies were focused on the effects of individual variables on the thermal environment. However, practical indoor thermal characteristics are determined using a multiphysical coupled field comprising convection, conduction, and radiation. Highly accurate mathematical models of coupled heat transfer are necessary for representing actual physical fields, and the accuracy of numerical simulations should be improved to capture small-scale turbulence characteristics. Therefore, research should be focused on developing new approaches, especially for conventional turbulence models. It is known that advanced numerical simulation methods can yield detailed and highly accurate information regarding heat transfer in the case of small-scale flow.
In 1970, Fanger proposed a predictive mean vote (PMV) prediction model based on statistical analysis [
21]. The model accounted for parameters such as air temperature, humidity, airflow velocity, mean radiant temperature, clothing insulation, and human metabolic rate. Studies have demonstrated that the PMV prediction model can be used to accurately evaluate thermal comfort at steady state [
22]. Several researches have used the model to evaluate thermal comfort. Overall, physical and human factors are the key variables that determine thermal comfort in indoor environments. The control methods used to improve thermal comfort depend on all the input variables of control systems. Predicting the associated outputs can be effective for designing suitable control strategies to assess and improve thermal comfort. However, the strong nonlinear relationship between the system input parameters and the results is a limitation, and conventional methods are ineffective at revealing intrinsic relationships between the variables.
In recent decades, neural network technology has been increasingly used in various fields [
23]. Combined with engineering techniques, this technology can map the relationship between input and output elements [
24]. Shaikh et al. [
25] proposed a classification method that accounted for conventional, model-based, and intelligent control systems with predictive or adaptive controllers; they also proposed thermal comfort models based on artificial intelligence techniques [
26]. Afram and Janabi–Sharifi [
27] reviewed a data-driven, physical, and grey box-based HVAC system. Dounis and Caraiscos [
28] discussed intelligent computational methods such as fuzzy logic-based methods, neural networks, and hybrid methods to construct high-precision models of thermal comfort. Wang and Srinivasan [
29] reviewed the concepts, applications, advantages, and disadvantages of artificial intelligence-based prediction methods. The current challenges include the tendency of neural networks to fall into local optimization and the lack of accuracy of models.
According to the aforementioned studies, different initial boundary parameters can influence the airflow and temperature fields in a room, and highly accurate numerical simulation methods should be developed to assess the characteristics of small-scale turbulence in indoor environments. Furthermore, the models of multiphysical coupled heat transfer (convection, conduction, and radiation) in indoor environments have limitations. The influence of different initial boundary conditions on indoor airflow and temperature fields in a specific room should be investigated, and the correlation between the indoor thermal environment and human comfort should be explored. With advancements in the field of artificial intelligence, the accuracy of intelligent thermal comfort prediction models improves, and models that combine thermal comfort parameters and artificial intelligence can be further improved.
To address the aforementioned limitations, we used an advanced high-precision large eddy simulation (LES) method that accounts for turbulent small vortex motion and portrays realistic indoor information. The method can provide insights into heat flow and heat transfer. In addition, artificial intelligence controls the strong nonlinear variation in each parameter in the thermal comfort prediction model, decouples the correlations among the parameters, and reveals the intrinsic relationships among the variables. The predicted correlated outputs can be used to effectively design suitable control strategies to assess and improve thermal comfort; the results can also provide guidance for further research. To address the aforementioned limitations, the remainder of this paper is organized as follows:
Section 2 discusses the main methods used to determine thermal sensation and comfort.
Section 3 describes the basic parameters used for assessing thermal comfort in indoor spaces, with a particular focus on the parameters that determine relevant temperatures.
Section 4 describes thermal comfort indexes used to assess various thermal environments and conditions.
Section 5 discusses the thermal comfort models that can be employed to develop strategies for controlling indoor thermal environments.
Section 6 entails the conclusions of the study.
2. Thermal Comfort Model
Thermal environments are typically assessed in terms of thermal comfort, which is a key factor for the subjective evaluation and perception of indoor thermal environments. A comfortable indoor environment induces physical and psychological pleasure and relaxation [
30]. Factors that primarily influence human thermal comfort include subjective human feelings, such as mood and emotion, and thermal environment factors, such as indoor humidity and temperature. Thermal comfort is also influenced by differences between the insulation afforded by the clothing of different individuals and between the different physiological metabolic rates of the individuals. Human sensitivity to the environment is influenced by a combination of these factors, which cause an individual to feel physically comfortable [
31].
2.1. Thermal Comfort Index
Typically, human thermal comfort is primarily influenced by six factors [
32,
33].
(i) Air temperature
The most intuitively perceived factor of an indoor environment is temperature; thermoregulation is the primary response of the human body to variations in temperature in an indoor environment. Notably, when the indoor temperature is <12 °C or >30 °C, the functional state of the human body is affected, especially the operation of the blood circulatory and digestive systems. At such temperatures, an individual cannot be comfortable or perform regular tasks. When the room temperature is lower than 18 °C or higher than 28 °C, the individual’s work efficiency is affected. The most comfortable indoor temperature is 25 °C, which is associated with the highest work efficiency.
(ii) Relative humidity
Relative humidity also has notable influence on human comfort. At a given indoor temperature, the higher the relative humidity, the higher the water vapor pressure in the air, and the less the amount of sweat excreted by the body. Moreover, when the relative humidity increases, high temperature causes suffocation, and low temperature causes individuals to feel cold. Humidity influences the evaporation and diffusion of sweat from the skin surface, and skin temperature changes when the skin relaxes or contracts during evaporation.
(iii) Airflow velocity
The velocity of airflow directly affects the rate of heat dissipation and the evaporation of sweat. The optimal airflow velocity is determined by the movement of the human body. When an individual moves fast, thermal comfort is achieved if airflow velocity is high; however, when the individual moves slow or is not moving, the airflow velocity required for thermal comfort is low. Effectively, airflow velocity depends on the rate of evaporation of sweat from the surface of the human body.
(iv) Average radiation temperature
The average radiation temperature is the average temperature of the radiation emitted by surrounding objects in an indoor environment; it has an influence on human thermal comfort. The exchange of radiated heat between the human body and the surfaces of objects in the environment depends on the radiation emitted from each surface and the relative positions of individuals and objects. The average radiation temperature can be measured using a black ball thermometer.
(v) Human metabolic rate
Metabolism is the process that involves the conversion of matter into energy in living organisms; it is a process of chemical heat production, which results in chemical changes in living organisms. The metabolic rate of the human body is determined by the amount of heat generated per unit of time on the surface area of the body. The unit of metabolic rate is met; 1 met = 58.2 W/m2. Metabolic rate increases with an increase in activity. For example, the metabolic rate of the human body is 1 met when sitting still, ~0.7 met when lying down, and 7.6 met when playing ball. The amount of heat generated by the human body is different in different states, and the metabolic rate of the human body is also a key factor affecting thermal comfort.
(vi) Clothing insulation
In addition to other factors, the clothing of an individual has an influence on thermal comfort. For example, during summer, people typically wear light clothes such as short-sleeved clothes, which dissipate heat and provide comfort, whereas during winter, people wear thicker clothes that provide high thermal insulation and comfort and protect the body from low environmental temperatures. Therefore, suitable clothing can help regulate thermal comfort. Clothing is generally distinguished according to the degree of insulation; suitable clothing insulation ranges from 0.35 to 0.6 clo during summer and from 0.8 to 1.2 clo during winter.
The six main factors that influence thermal comfort can be categorized as physical environmental variables (air temperature, relative air humidity, air velocity, and average radiation temperature) and human factors (human metabolic rate and clothing insulation). If metabolic rate and clothing insulation are known and the environmental variables are appropriately regulated, an optimized combination of these variables can be used to calculate the health-friendliness and thermal comfort of indoor environments; the criteria for evaluating these parameters are defined as the comfort rating index.
2.2. Thermal Comfort Equations
Prof. Fanger from Denmark developed the PMV model [
21] based on subjective voting and testing of environmental parameters, which influence physiological thermal sensation. The PMV index is commonly used to assess indoor thermal environments. The PMV index uses a seven-point scale (−3, −2, −1, 0, +1, +2, and +3) corresponding to seven degrees of thermal sensation in the human body: cold, cool, slightly cool, neutral, slightly warm, warm, and hot. In addition, differences in physical strength and the ability to withstand high or low temperatures influence the degree of thermal comfort of people in indoor environments. To evaluate these differences, Prof. Fanger formulated a predicted percentage dissatisfaction (PPD) index, which can be used to predict the effects of thermal environments on the human body, as displayed in
Table 1. For a comfortable thermal environment, the generally acceptable range for PMV is from −1.0 to 1.0, with PPD < 26% [
21].
Prof. Fanger developed a thermal comfort model, which describes energy balance in the human body. The PMV equation for the expected heat index is as follows:
The important parameters are as follows:
M: energy metabolic rate of the body in W/m2.
W: mechanical power generated by the human body in W/m2.
Pa: partial pressure of water vapor in the surrounding air in Pa.
ta: temperature of the air around the human body in °C.
tr: average radiation temperature in °C.
fcl: ratio of the area of the body covered by clothing to the exposed area.
tcl: temperature of the outer surface of the garment in °C.
hc: surface heat transfer coefficient in W/(m2·K).
Accordingly, Prof. Fanger derived the following expression using
PMV and
PPD along with the quantitative evaluation of the sampling statistics.
As illustrated in Equation (2), the PMV–PPD equation for the expected heat index is a complex multiparameter and multivariate nonlinear expression, which can be indirectly transformed using relevant parameters into a PMV equation for the expected heat index to calculate PMV values.
The surface temperature of clothing,
tcl, is calculated using the following equation:
The surface heat transfer coefficient,
hc, is calculated as follows:
where
Va is the airflow velocity, m/s. The clothing coefficient
fcl is calculated using the following formula:
where
Icl is the clothing insulation. The water vapor partial pressure in the air surrounding the body is calculated as follows:
where
φ is the relative humidity;
Ta =
ta + 273.15 (K).
The equation for the average indoor radiation temperature
tr is as follows:
where
tg is the temperature of the black sphere, which is typically 2–3 °C higher than room temperature. Substituting Equations (3)–(7) into Equation (1), the PMV equation for the compound heat index can be simplified as follows:
Based on Equation (8), the PMV thermal comfort index for evaluating indoor thermal comfort was established in this study. In addition, the influence of the initial thermal environmental variables and human factors on PMV was investigated. Therefore, the present study lays a foundation for the subsequent modeling of a neural network based on PMV prediction.
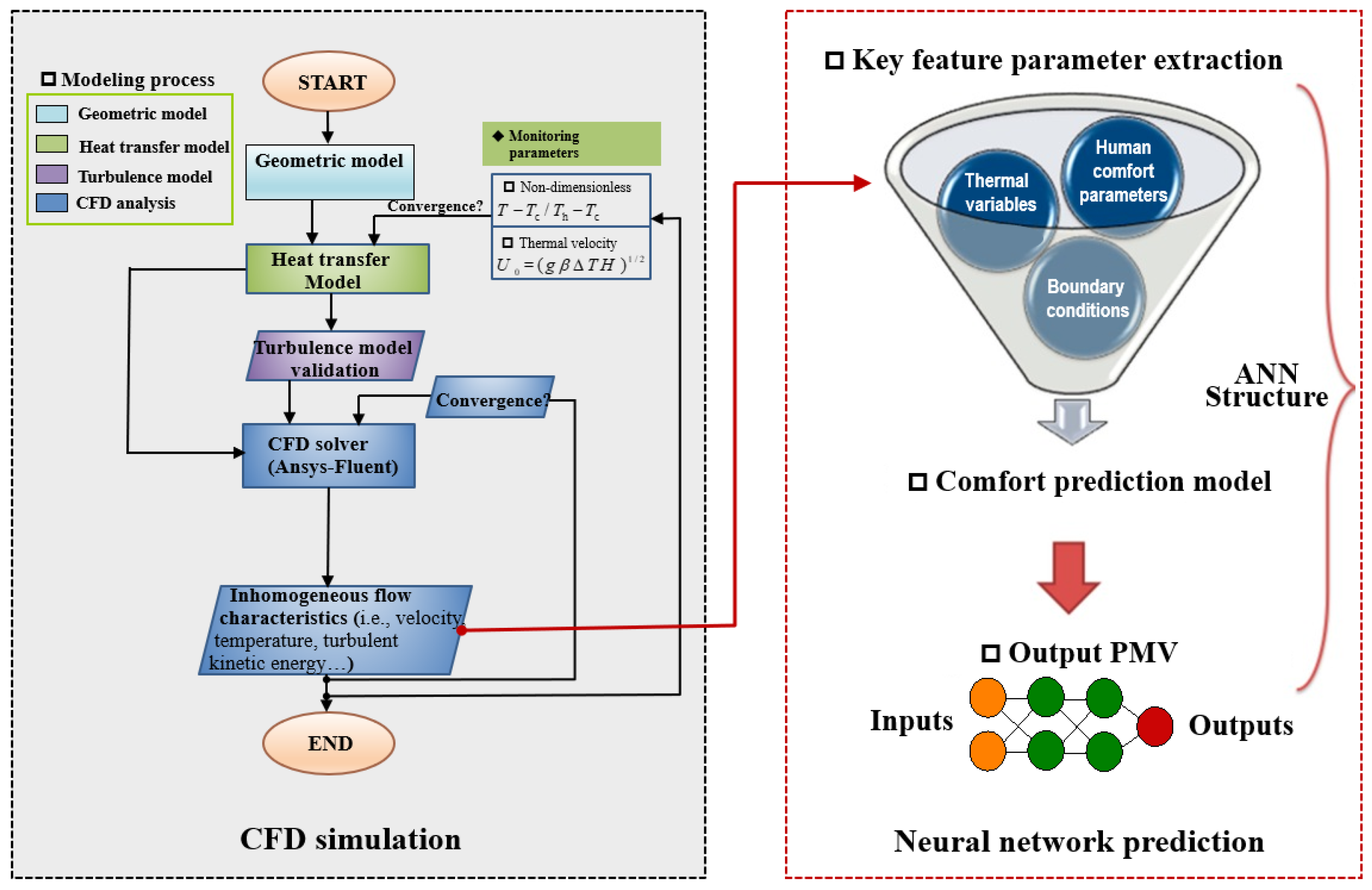
3. Modeling Process
Thermal comfort prediction is a complex nonlinear process that is directly influenced by multiple factors. Therefore, constructing a mathematical model for thermal comfort prediction is necessary.
Figure 1 illustrates the modeling process, which involved two main stages: numerical simulation and neural network prediction. In the model, the thermal environment was represented by an extremely complex airflow phenomenon, which was modeled through CFD techniques. In addition, parameters having substantial effects on the PMV indexes were identified from the numerical simulation results and used as input elements to construct a neural network prediction model.
3.1. Geometrical Model
Figure 2a depicts the overall office building model constructed for numerical simulations; the building is subjected to uniform lighting during all seasons. We analyzed only the indoor thermal environment of the building, with only solar radiation as the heat source. The model was constructed considering that the building may be located in a rural or urban area, with or without vegetation outside. The proposed physical model is universally applicable.
Figure 2b depicts a representative room configuration with a primary structure constituted by an insulated floor, roof, three walls, and a thermally conductive glass curtain wall. One of the walls has openings for air ventilation, and the glass allows external sunlight radiation to enter and induce heat in the room.
Figure 2c depicts the physical model of the simulated thermal environment, with dimensions 3 m, 2.5 m, and 3 m along the
x, y, and
z-axis directions, respectively.
3.2. Heat Transfer Model
Figure 3 displays a schematic of the heat transfer model. The process of heat transfer strictly obeys the law of energy conservation. Solar radiation is the primary form of heat in the model; the heat transfer processes include conduction, convection, and radiation. The proposed model is focused on the airflow field in a room. For modeling purposes, the term representing radiation from the glazing can be completely converted into the heat load term in the expression for thermal radiation displayed in
Figure 3b. Glazing is a heat transfer medium that dominates heat exchange between the internal and external walls in the model.
The inner wall temperature is obtained according to the following equation:
where
Gs is the incoming solar radiation and
αs is the absorption coefficient;
h is the convective heat transfer coefficient;
σ is Stefan–Boltzmann constant, which has a value of 5.672 × 10
−8 W/m
2·K;
Tw,in and
Tw,out denotes the inner and outer wall temperatures, respectively. The term representing the radiation from the glass can be neglected because the amount of radiation is negligible compared with the amount of heat transferred through internal convection. A mixed heat transfer equation is derived using Equations (9) and (10):
The statistical values of thermal conductivity and average outdoor air temperature of glass are displayed in
Table 2.
3.3. Validation of Turbulence Model
The indoor thermal environment in the building significantly influenced human comfort. Thus, multiscale airflow and temperature fields in the indoor environment should be analyzed.
(i) Turbulence model
LES and direct numerical simulation (DNS) are suitable for calculating small vorticity and turbulence statistics for indoor airflow fields [
34]. However, the applicability of DNS is limited by its requirement of high mesh quality. Reynolds-averaged Navier–Stokes (RANS) models, which are based on time-averaged equations, are commonly employed in the simulation of engineering flows using turbulence models [
35]. Moreover, the prediction performance of RANS models is unstable, and the compatibility between model parameters and experimental or simulated data is unreliable under various conditions. Therefore, we used the LES model in the present study to evaluate the airflow field in an indoor thermal environment. Herein, the classical two-equation turbulence models (standard k-ε, realizable k-ε, SST k-ω), three-equation models (transition k-kl-ω), four-equation models (transition SST, V2f), and seven-equation models (Reynolds stress) were used to compare the predicted values. These turbulence models can be used to predict turbulent airflow by covering almost all basic airflow states.
(ii) Monitoring physical parameters
The simulation results and experimental data were accurately analyzed and compared to obtain the ideal turbulence model. Moreover, the experimental data were selected carefully. The glass heat source and the air supply system contributed to the multiscale turbulent characteristics of the indoor airflow and temperature fields. Therefore, dimensionless temperature parameters (T − Tmin/Tmax − Tmin) were introduced to evaluate and validate the prediction performance of turbulence models.
The experimental data on thermal characteristics were selected according to [
36].
Table 3 lists the dimensions of the test space; the length, width, and height of the test space were 1.45, 0.725, and 0.725 m, respectively. The test space dimensions promoted airflow and heat transfer. Ref. [
36] provided a more detailed description.
3.4. Dynamic Equation
The airflow and temperature distribution in a typical office building was numerically simulated using Fluent 19.0 software. The numerical simulations were based on finite volume methods. The developed LES model is based on instantaneous expressions and governed by the laws of conservation of mass, momentum, and energy.
The continuity equation is as follows:
where
is the velocity vector;
xi and
t are the coordinate vector and time, respectively.
The momentum equation is as follows:
where
σij is the stress tensor, and
τij is the sub-grid stress (SGS).
Energy equation:
where
is the enthalpy and
λ is the conductivity.
The SGS term can be divided into isotropic and deviatoric terms:
The deviatoric part represents eddy diffusion, which is defined as
where
Sij is the strain-rate tensor, and
μSGS is the sub-grid viscosity.
SGS viscosity is defined as follows:
The mixing length
Lm is calculated using the following expressions:
In addition,
Cs is expressed as follows:
Ck is assigned a constant value of 1.4.
All simulations in this study were performed using ANSYS Fluent commercial software. The pressure-based isolation algorithm was employed to solve the discretized governing equations. The gradient evaluation method based on Green–Gauss cells was used to simulate the gradients of the convection and diffusion terms in the flow conservation equations, and the standard scheme was used to interpolate the pressure values on each surface. In addition, the bounded central differencing scheme was used to solve the momentum and energy equations. Furthermore, a bounded second-order implicit scheme was used to solve the time-dependent equations.
3.5. Grid Resolution
Table 4 summarizes the mesh generation methods and simulation results of four grid systems. The value of
y+, which is a refinement parameter for the near-wall region, is restricted to < 1.
Figure 4 displays a schematic of the grid system with a growth coefficient of 1.05, which is the same along the
x,
y, and
z directions. This study established novel grid systems with 3.0 M, 4.7 M, 7.0 M, and 9.9 M elements. The initial thermal boundary conditions were fixed as follows: (i) the inlet velocity was 0.5 m/s and temperature was 293.15 K; (ii) the acceleration due to gravity was 9.8 m/s
2. The outlet temperature and velocity were considered the monitoring parameters, and the results for the 9.9 M system were considered the baseline. As displayed in
Table 3, the error percentages of
Tout were 7.2%, 4.5%, and 1.7% for the 3.0 M, 4.7 M, and 7.0 M systems, respectively. The error percentages of
Vout were 27%, 13%, and 2% for the 3.0 M, 4.7 M, and 7.0 M systems, respectively. After comparative analysis, the 7.0 M grid system was selected for further simulations.
3.6. Comparison Results
Figure 5 illustrates the comparison of the accuracy of temperature prediction of different turbulence models. Considerable variation was noted, especially near the wall region. The fitness degree between the simulation results and experimental data determined the prediction accuracy of the turbulence models, according to which an excellent model can be selected for future studies. Among all the commonly used turbulence models, the LES turbulence model had the optimal prediction accuracy of 97%. The other turbulence models exhibited poor prediction performances with significant deviations, especially in the top region. In the present study, the LES model accurately evaluated the temperature gradient, and the results were consistent with experimental data. Therefore, the LES model was adopted as the suitable simulation model for this study.
4. Results and Discussion
Table 5 displays the initial boundary condition parameter settings. The gas supply represented the inlet boundary, and the outflow represented the outlet boundary.
Table 5 summarizes the boundary conditions that were divided into two categories: (i) environmental factor variables, which included air temperature, relative air humidity, airflow rate, and average radiation temperature; (ii) human factor variables, which included human metabolic rate and clothing insulation. According to the range of values of environmental factor variables listed in
Table 6, three cases were established for numerical calculations; the values of initial air temperature, air relative humidity, airflow rate, and average radiation temperature were different in each case. Indoor buoyancy and inhomogeneity caused by gravitational acceleration were evaluated and analyzed in this study.
4.1. Thermal Stratification
The LES turbulence model was employed to investigate three important phenomena under a thermally stratified turbulent airflow in a room: (i) stability criterion of thermal stratification; (ii) inhomogeneity of thermal stratification; and (iii) turbulence statistics of thermal stratification. First, the thermodynamic criterion for the physical stability of thermal stratification in the room was theoretically investigated to derive the theoretical stability equation, and the small-scale thermal stratification phenomenon was evaluated through numerical simulations using the LES model. Second, the influence of thermal stratification on the inhomogeneity of velocity and temperature fields was investigated, and the influence mechanism and potential intrinsic mechanism of thermal stratification were determined. Finally, based on LES data, the turbulent transport characteristics of the thermal stratification phenomenon were analyzed, and the influence of spatial distribution on thermal stratification was investigated. Therefore, a theoretical basis was established for an in-depth understanding of the airflow and heat transfer mechanisms during thermal stratification.
The instability of indoor thermal stratification is a complex problem; thermal stratification is influenced by various factors, including thermal plume, wall boundary layer convection, jet flow of the supplied air, and dynamic thermal characteristics of the building. The determination of the stability of thermal stratification is limited by the combined effects of jet airflow and the dynamic thermal characteristics of the building. However, a complete theory for the determination of the stability of complex indoor thermal stratification is lacking. Considering the uncertainties of the stability of indoor thermal stratification in CFD numerical simulations, the conditions for thermal stratification were derived in this study based on generalized thermodynamic equations. Multiple numerical simulations were performed to analyze the intrinsic mechanism of thermal stratification and the airflow in indoor thermal stratification.
4.2. Turbulent Structure Analysis
Thus far, only a few studies have focused on the factors that lead to the inhomogeneity of indoor environments. The stability of air in an area is determined by the level of turbulence in the air, which primarily results from the interaction of thermal buoyant and inertial forces in the airflow field. Typically, turbulence is weak when thermal buoyant forces dominate, and it is strong when inertial forces dominate. The dimensionless term
Ri expresses the relationship between stability and turbulence intensity and is used to determine the turbulence of the airflow field. When
Ri is small, the airflow tends to be turbulent, and when
Ri is large, the airflow tends to be laminar.
The dimensionless terms
Gr and
Re are the Grashof number and Reynolds number, respectively, and are defined as follows:
where
u and
l are the fluid inlet velocity and characteristic length, respectively;
β is the volume expansion coefficient,
ν and
μ are the kinematic viscosity and molecular viscosity, respectively. The influence of natural convection is neglected when
Ri < 0.1, and that of forced convection is neglected when
Ri > 10; when 0.1 <
Ri < 10, mixed convection in a thermally stratified state influences the airflow. The physical model illustrated in
Figure 4c has an intermediate symmetry; thus, a two-dimensional plane was selected to evaluate the indoor thermal environment in this study. To determine the average airflow and temperature on the symmetric plane, the mainstream temperature (i.e., average temperature) and the mainstream velocity (i.e., average velocity) are defined as follows:
where
Ac is the area of the symmetry plane.
Figure 6 displays the histograms of the distribution of Richardson values for Case 1, Case 2, and Case 3. Note that the Richardson number for Case 1 was 12, buoyant airflow was the dominant airflow pattern, and turbulent airflow was negligible. In Case 2, the Richardson number was 0.5, which was between the minimum critical threshold 0.1 and the maximum critical threshold 10; although the airflow exhibited both buoyant and turbulent airflow patterns, turbulent airflow was the dominant flow pattern. In Case 3, the Richardson number was 3, and the airflow was in a mixed mode; however, compared with Case 2, the Richardson number increased to 3, and buoyant airflow was the dominant pattern.
Re denotes the turbulent inertial force field, and
Gr denotes the buoyant force field; the statistical properties of the two force fields were further analyzed. The LES results with high Reynolds number values were used to characterize airflow properties. Case 1, Case 2, and Case 3 described in this section were selected to characterize the variations in turbulence with changes in operating conditions. As displayed in
Figure 7, the differences in the high Reynolds values were notably under changing operating conditions. In Case 1, when the inlet air was 0.5 m/s, a high Reynolds zone was apparent in the inlet region. The turbulence was suppressed when the air flowed from left to right until the turbulence region disappears. The region on the right side was the region with insignificant turbulence characteristics. In Case 3, the maximum Reynolds number region was concentrated at the inlet when the inlet airflow velocity was 1 m/s. The turbulence was again suppressed near the region on the right. In conclusion, the left and right regions exhibited different airflow characteristics. Velocity distribution was dense near the inlet and the outlet, whereas the turbulence was suppressed in the region on the right. In Case 1, the turbulence characteristics in space were negligible because the inlet airflow velocity was 0.1 m/s.
Buoyant airflow is a physical phenomenon defined by the Grashof number. The formation and trend of buoyant airflow in a room should be carefully evaluated and considered.
Figure 8 displays the distribution of Grashof number on the symmetric surfaces in Case 1, Case 2, and Case 3. The buoyant airflow was thermally localized, especially concentrated on the heated glass wall surface. The fluid near the right side indicated apparent thermal stratification. The buoyant force was closely related to the expansion coefficient, as depicted in Equation (21). The density of the fluid increased near the surface of the hot wall, and a buoyancy-driven upward flow of the fluid was apparent in this region. The buoyancy effect was the most pronounced in Case 1, wherein a steady buoyancy effect occurred because of the absence of turbulent airflow at the interior. In Case 2, the inlet temperature was 15 °C, and the inlet velocity was 0.5 m/s. The buoyancy effect was weak because of the turbulence occurring at the interior of the inlet. However, the buoyancy effect was apparent in the region on the right. In Case 3, the inlet temperature was 25 °C, and the inlet velocity was 1 m/s; the intensity of turbulence in the interior increased, and the buoyancy effect was weaker compared with that in Case 2.
Turbulent and buoyant flows had the following characteristics:
- (i).
The turbulence at the inlet had a high Reynolds number and high velocity; buoyant airflow mainly occurred at the heated wall surface with thermal stratification.
- (ii).
Turbulent and buoyant flows resisted each other and both were mutually exclusive but coexisted in large-space built environments.
4.3. Effects of Different Boundary Conditions on Indoor Thermal Environment
Figure 9a displays that when the airflow velocity was 0.3 m/s, the indoor mainstream airflow was mainly concentrated at the bottom. When the airflow velocity increased to 0.5 m/s, the indoor airflow accelerated and turbulence intensified, while the flow had a vortex structure, and the mainstream airflow occurred in the upward direction. When the airflow velocity was 0.7 m/s, the turbulent force was strong, and the indoor airflow distribution was uniform; however, the airflow was mainly concentrated at the bottom. As displayed in
Figure 9b, when the inlet temperature was 1 °C, a high-temperature region was noted in the middle of the interior space and near the right side. The high-temperature region was formed because of a radiant heat source on the inner glass wall surface at the rear side; the heat source heated the critical space fluid and caused an uneven temperature distribution in the chamber. When the temperature increased to 15 °C, a local high-temperature zone occurred on the left side. When the inlet temperature was 25 °C, the temperature distribution in the room was more nonuniform, and the fluid temperature on the rear side was considerably higher than that on the left side.
Figure 9c illustrates the cloud plot of indoor humidity distribution; when the inlet humidity was 30%, the indoor humidity was uniform, whereas when the inlet humidity was between 50% and 70%, the indoor humidity distribution was not uniform. Furthermore, the humidity was low in the rear glass radiant heat source area and high in the air away from this area. Overall, the influx and outflux of air on the left side significantly affected indoor airflow distribution. In addition, the rear side glass radiation heat source significantly affected indoor temperature and humidity distribution. Thus, both sides exhibited nonuniform distribution of the airflow field.
4.4. Turbulent Statistical Analysis
Because LES can be used to obtain highly accurate small-scale turbulence structures, this study analyzed the generation of turbulent kinetic energy and buoyancy force.
Figure 9 illustrates the distribution of Re and
Gr; the region of strong airflow variations located at the left inlet and outlet was dominated by
Re. The buoyant force dominated by
Gr was concentrated near the right heated wall. The generation of turbulent kinetic energy and buoyant force can be expressed as follows:
In
Figure 10a, the distinct peak for a location near the inlet corresponds to the turbulent kinetic energy production rates in Cases 2 and 3, thereby indicating that turbulence changes more significantly near the inlet. Thereafter, a steep drop was observed along the
x-axis, corresponding to the strong right-hand buoyancy effect that weakened or suppressed the turbulence. Thus, turbulence is a change in state from turbulent to buoyant flow. In the closed model in Case 1, the inlet velocity was considerably low, and the turbulence generation rate was negligible. In
Figure 10b, the peak of the buoyancy generation rate appeared on the right side, indicating that the right heated wall was the origin of the spatial buoyant airflow and thermal stratification. In the closed model in Case 1, the buoyant airflow was fully utilized and relatively stable, such that the peak corresponding to the buoyant effect was the highest. However, when a certain inlet volume was known, the rate of buoyant airflow decreased significantly because of the intervention of turbulence, thereby weakening the buoyant flow.
The radiation from the glass on the right side of the large space acted as a heat source, thereby inducing heat flow in the room. The diffusion of heat has a notable influence on human comfort and combined with the inertial force
Re and buoyant force
Gr, diffusion induces complex heat transfer. Heat flux can be expressed by the following equation;
The magnitude of the turbulent heat flux (
vx, velocity in the
x-axis direction;
vy, velocity in the
y-axis direction) determined the degree of turbulent flow.
Figure 11a illustrates the turbulent heat flux distribution along the
x-axis direction. Notably, the turbulent heat flux increased sharply near the inlet and the outlet: it had the maximum value away from the heated wall. When the inlet velocity was high, the peak heat flow along the
x-axis direction was large, indicating a large heat transfer. By contrast, in Case 1, the heat flux along the
x-axis direction was almost zero because the airflow velocity was small.
Figure 11b illustrates the turbulent heat flux distribution along the
y-axis direction. The heat flux distribution along the
y-axis direction was drastically different from that along the
x-axis. In Case 1, the heat flux perturbation distribution along the
y-axis was inhomogeneous in the room, indicating that the degree of heat transfer from the bottom to the top of the room was relatively high. Owing to the small inlet air velocity and strong full-field buoyant force (see
Figure 8a), the cold air at the top flowed toward the bottom under the influence of gravity; thus, the heat flux along the
y-axis direction was intensified. However, in Case 2 and Case 3, the heat flux on the left side of the
x-axis was high and on that of the
y-axis was low because of higher inlet airflow velocity along the
x-axis. The right side captured the locally enhanced heat flux distribution in the
y-axis at the glass radiant heat source mainly because of the heat transfer from the bottom to the top of the buoyancy region, as displayed in
Figure 8b,c. In summary, the inertial and buoyant forces have a significant influence on the airflow and temperature fields; however, the influx and outflux of air and the glass heat source resulted in a nonuniform thermal environment, which influenced indoor airflow and temperature distribution and thus, human comfort.
A uniform distribution of indoor temperature is crucial to improving indoor air quality and thermal comfort and is a key factor that effectively improves building environments. We analyzed the indoor airflow velocity, temperature, and humidity distribution. Furthermore, we analyzed the indoor radiant temperature distribution. The complexity of spatial temperature distribution increased because of the presence of glass radiant heat sources.
Figure 12 illustrates the points for monitoring indoor space radiation temperature (5 × 9). The interior space was primarily divided into two areas: a turbulence-dominated area at the left air inlet and a buoyancy-dominated area at the right glass wall heat source. The radiation temperature was calculated using the average value of each data point in the space using the following equation:
Under the same operating conditions, the glass wall surface temperature was considerably higher than the indoor radiation temperature, and the difference between the two temperatures determined the flow of radiation. As displayed in
Figure 13, the difference between the glass wall surface temperature and the radiation temperature in Case 1 was large because of the low entrance temperature. As displayed in
Table 2, the constant temperature of the glass wall surface was 20 °C. When the indoor temperature was increased in Case 2 and Case 3, the difference between the indoor radiation temperature and the glass wall surface temperature was considerably reduced, indicating that the indoor radiation temperature field tended to be consistent. The indoor radiant temperature and the corresponding wall temperature in Case 2 and Case 3 varied similarly from bottom to top, indicating that the radiation temperature distribution in the space is identical.
6. Conclusions
The poor evaluation and uncertain prediction of thermal comfort parameters and PMV indexes using existing techniques limit the assessment of thermal environments. First, to accurately characterize indoor thermal environments, a turbulence model was proposed and evaluated. The LES method was found to be effective for predicting small-scale turbulence characteristics with high accuracy. In addition, several conventional buoyancy criteria were analyzed to distinguish the types of mixed convection. The results indicated that turbulence with a high Reynolds number and high velocity occurs at the entrance of a room, whereas buoyant airflow occurs primarily on thermally stratified heated walls. Turbulence and buoyant airflow act against each other and are both mutually exclusive but coexist in spacious building environments.
Second, to address the relationships between thermal parameters and PMV values, a neural network with strong nonlinear mapping relationships was established in this study. The neural network had a 6-22-23-1 structure and was well-trained. Thirty randomly selected samples from among 5000 data points were validated; the validation results indicated that the proposed ANN-GA model was simple and effective. Furthermore, the maximum MRE and RMSE were 1.35% and 1.34%, respectively. Finally, six test groups were selected to compare the prediction performance of the proposed ANN model. The results indicated that the ANN model had high prediction accuracy, with MRE <1.38% and a regression coefficient of ~1 under both training and non-training conditions.
Overall, using the ANN is a novel approach that can critically improve the assessment of indoor thermal environments and human comfort. This study provided new insights into the assessment of the thermal environment and thermal comfort of buildings. The proposed ANN model can be used to analyze thermal comfort owing to its generalizability, reliability, and computational efficiency, which are key to practical applications. In addition, additional machine learning tools and algorithms can be integrated into the ANN model to further improve its computational accuracy and thus increase the feasibility of applying the theory of thermal comfort.































{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}