
Real-Time and Remote Construction Progress Monitoring with a Quadruped Robot Using Augmented Reality

 , ,
, ,
Abstract
1. Introduction
- 1
- To design an integration framework for AR and quadruped robotics.
- 2
- To develop a system architecture for remote control of the robot and visualization of the augmented site reality.
- 3
- To evaluate the feasibility of the proposed framework.
2. Background
2.1. Progress Monitoring in Construction
Remote Inspection
2.2. Augmented Reality (AR) in Construction Progress Monitoring
2.3. Robotic Inspection and Monitoring
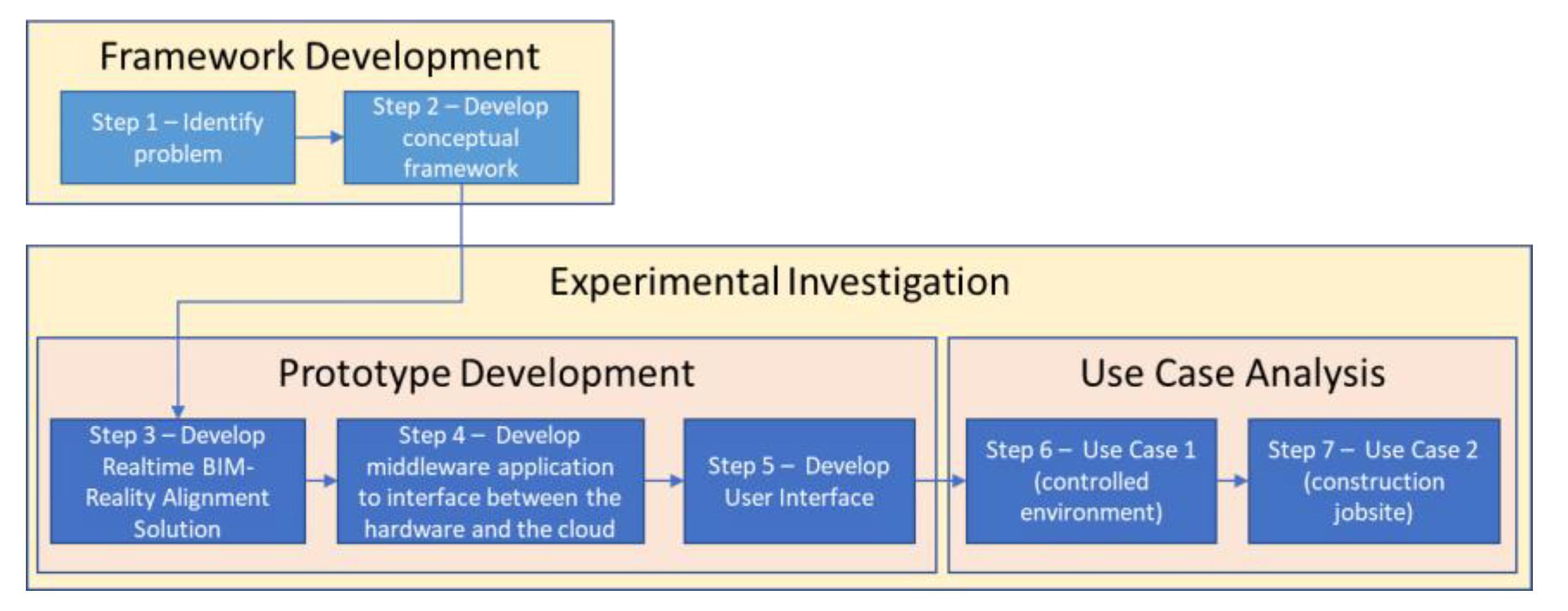
3. Research Methodology
4. Proposed Computational Framework for Remote Construction Progress Monitoring
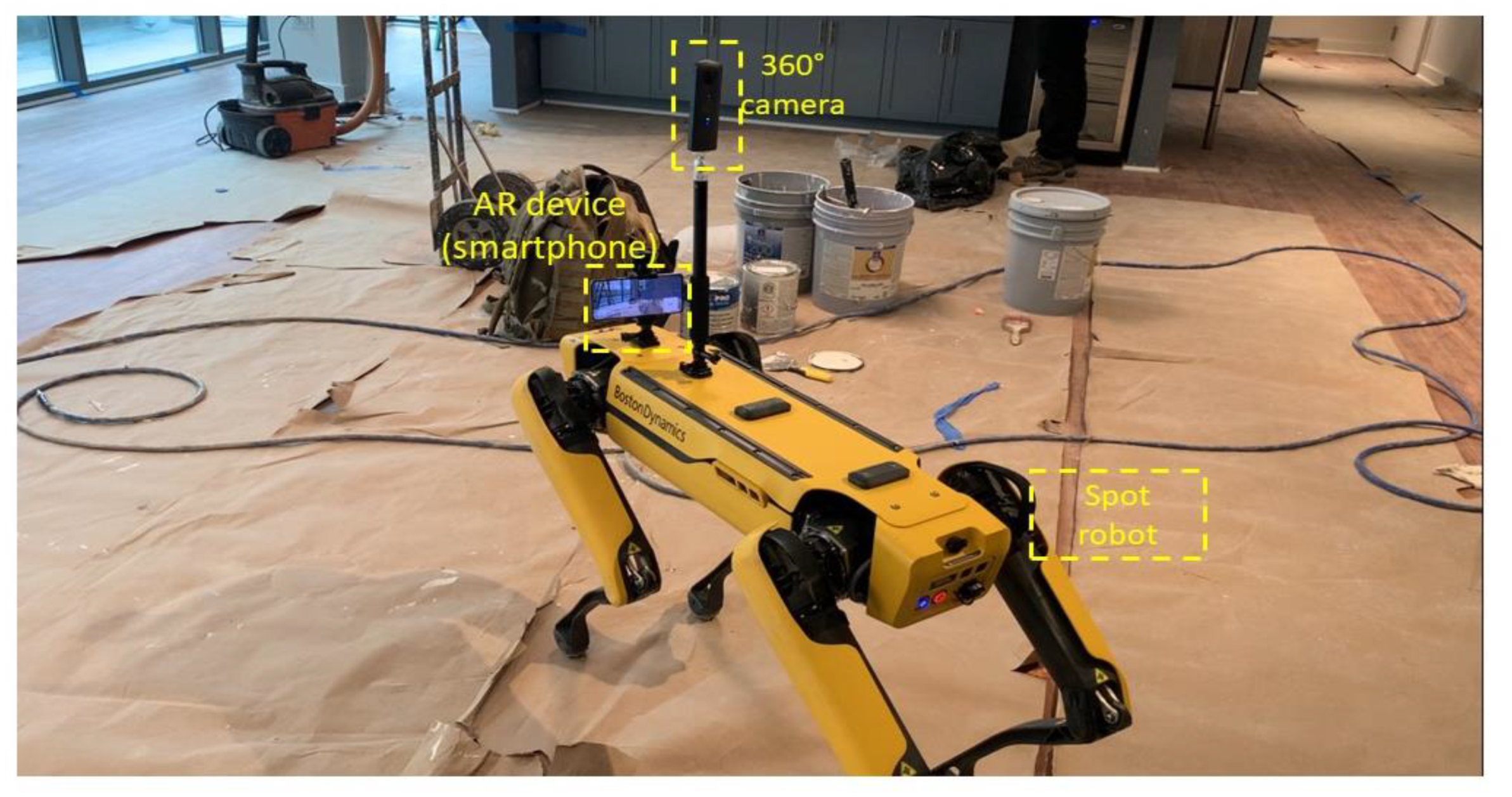
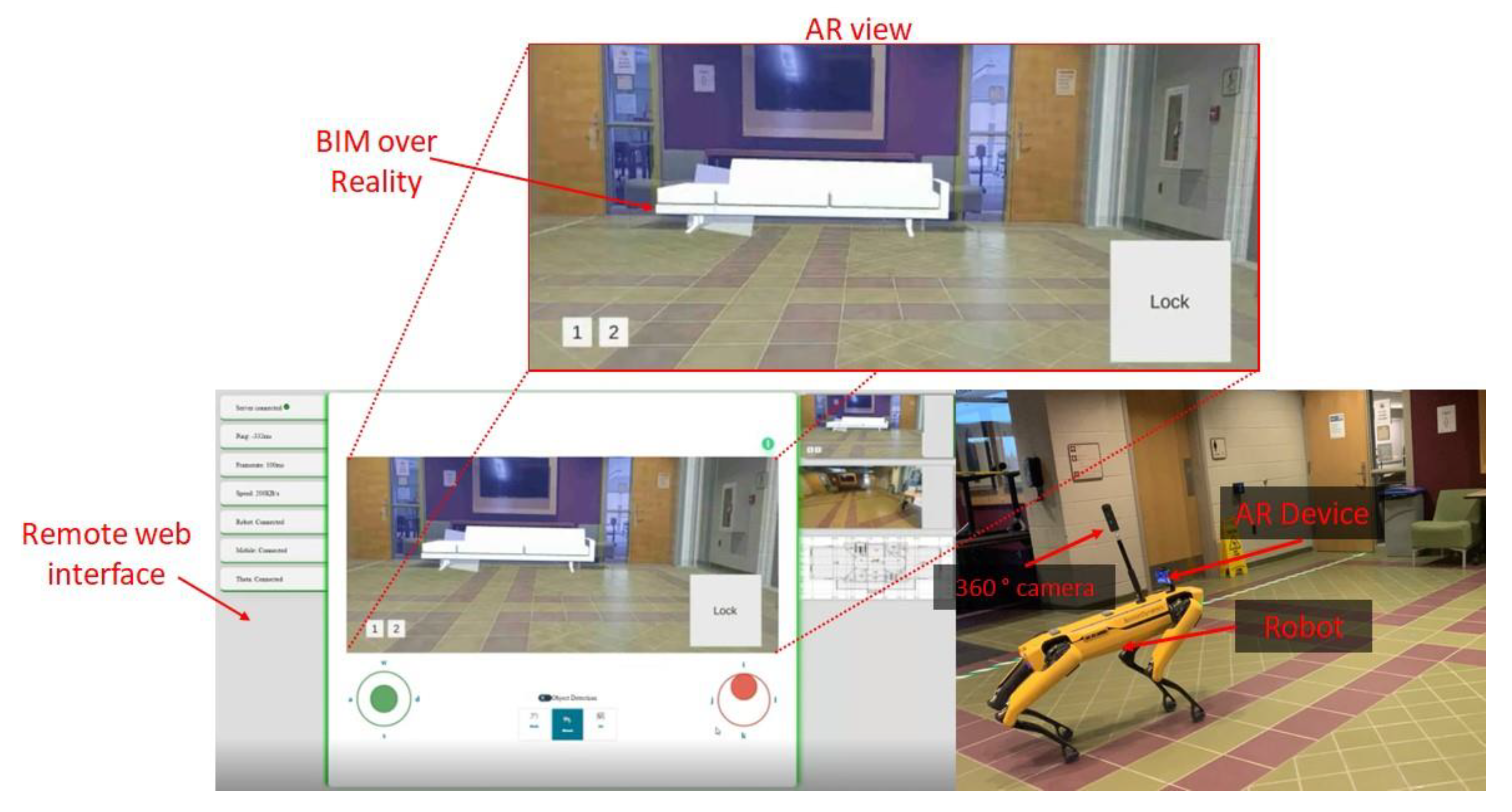
- Robotic platform—The robotic platform is composed of a legged robot that can navigate through the unstructured environment of a construction site and across multiple floors. The robot is equipped with a 360° camera for a panoramic view of the robot’s surroundings for navigation, and an AR device that is typically a smartphone with an AR app.
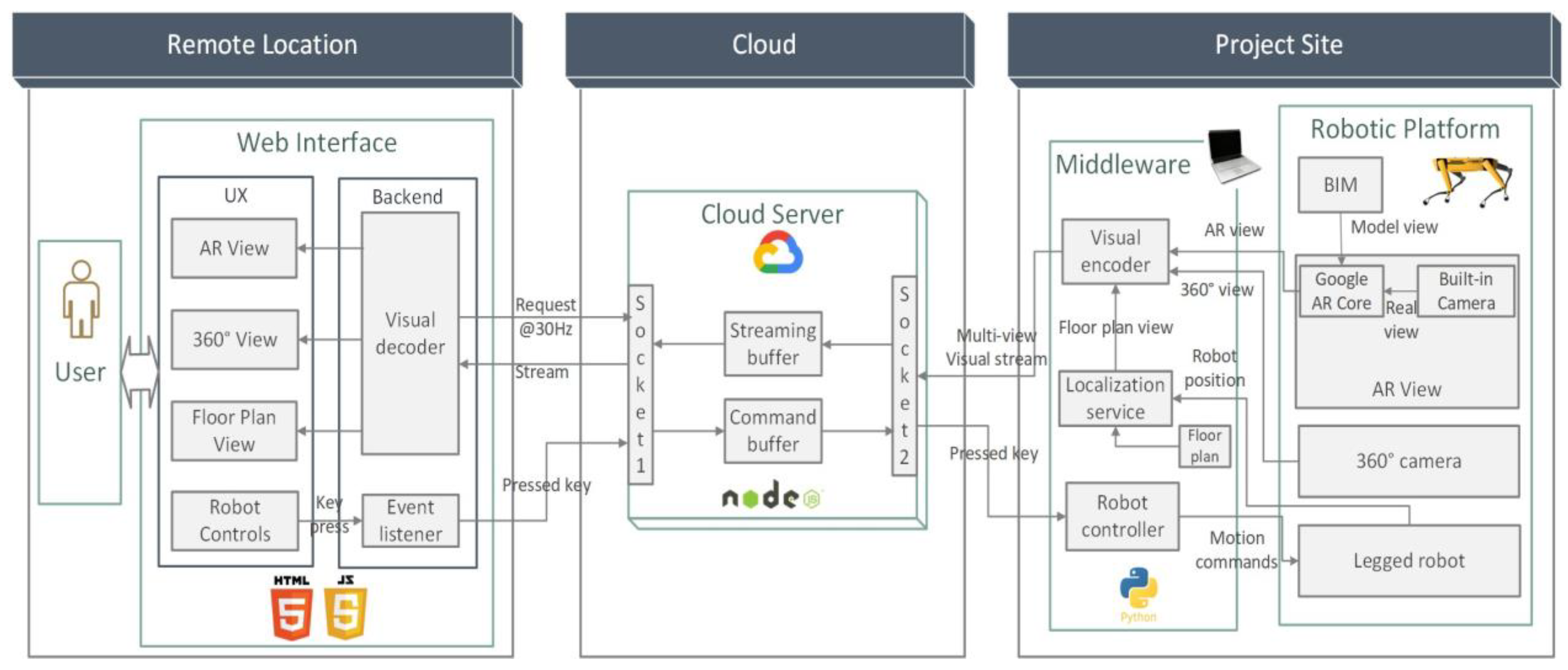
- Middleware—The middleware is a computing device either installed on the robot or at a fixed location in the construction site. The role of the middleware is to directly communicate with the robot and other hardware, pass user commands, and send the real-time information from the devices to the server. The middleware uses the robot’s application program interface (API) to control the robot.
- Cloud Server—The server separates the user from the project site and facilitates remote inspection. The server stores the latest image frames from the site and sends them to the Web Client when requested.
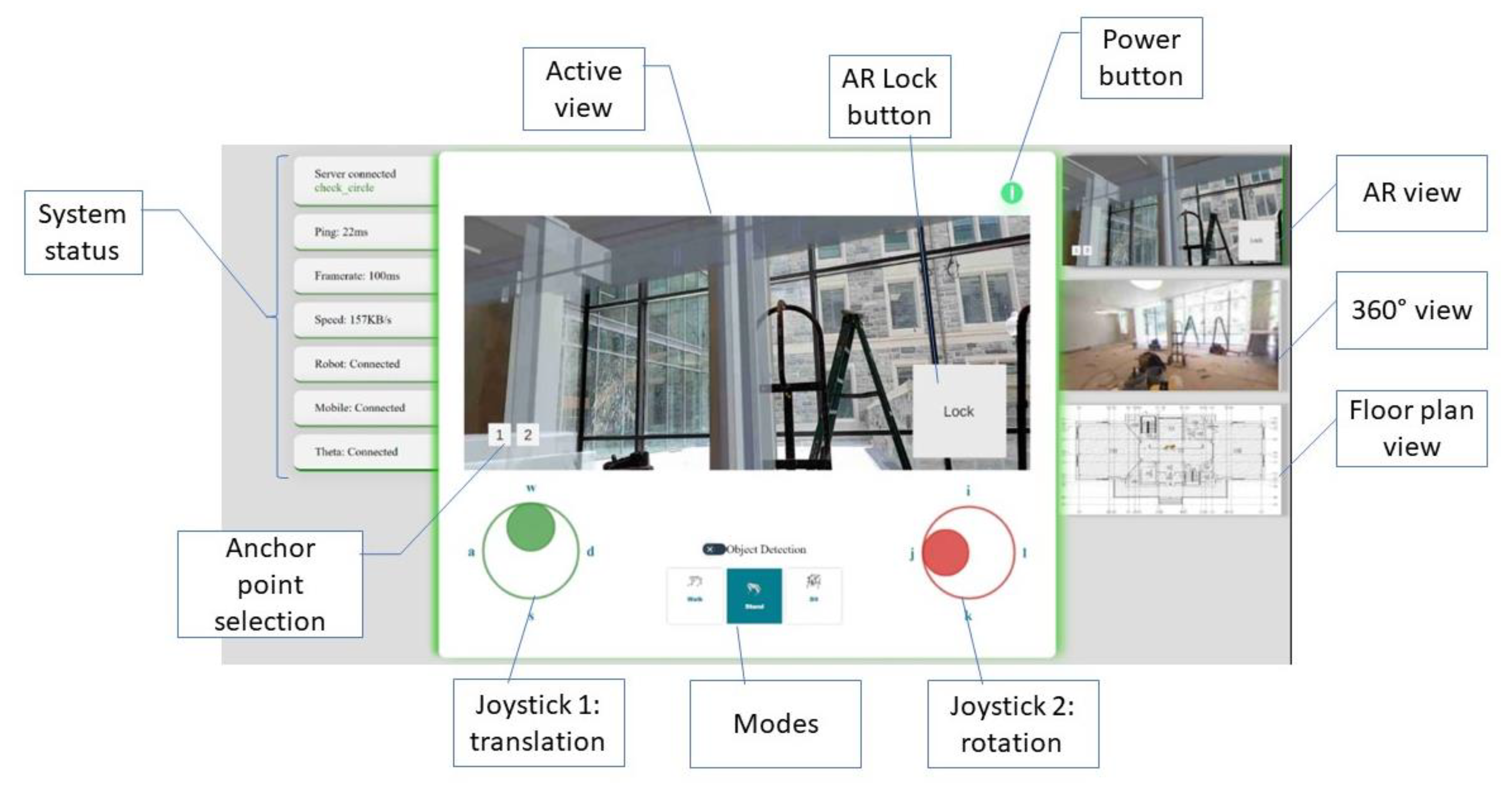
- Web Client—This is the main user interface through which the user or remote inspector interacts with the system. The web client provides control options for the robot to sit, stand, or move around. Apart from controlling the robot, the user can switch between one of the three views:
- 1.
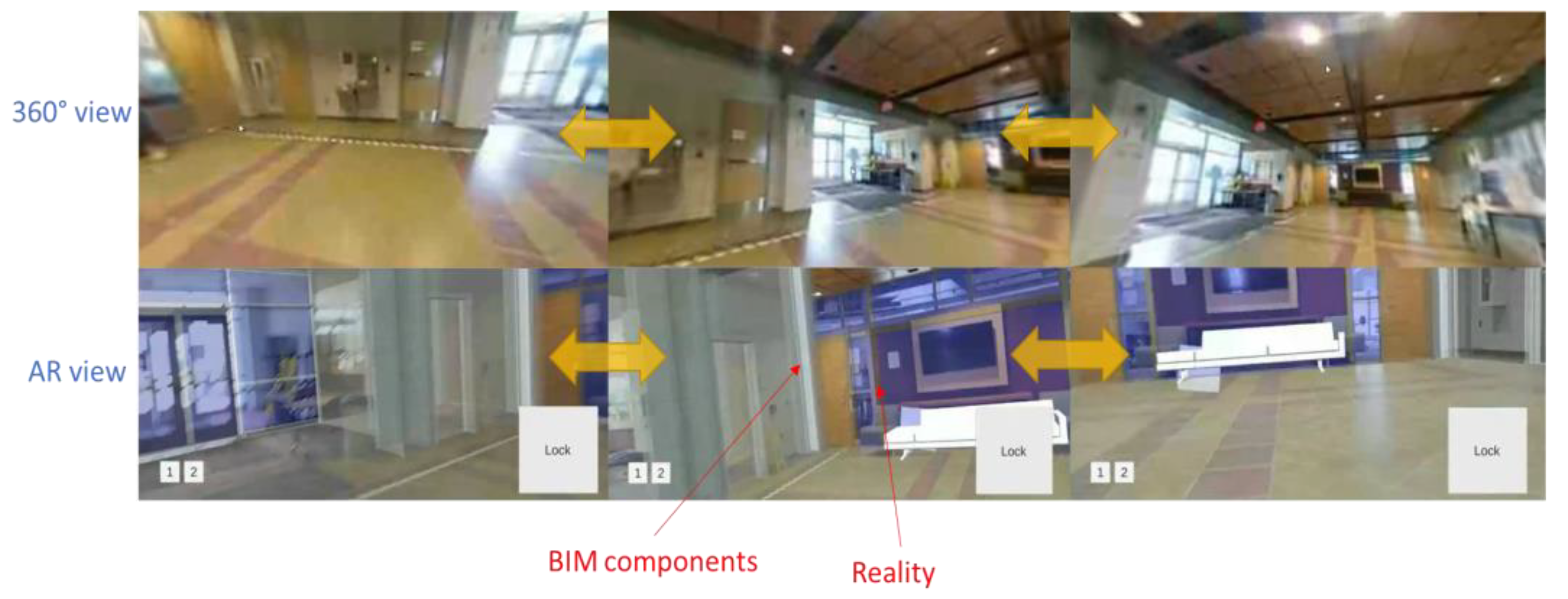
- AR View—This view shows the high-quality live stream of the site captured from the AR device on the robotic platform. The AR view shows an augmented reality environment by overlaying the BIM model on the live video feed of the job site.
- 2.
- 360° View—This view shows a 360° panoramic view of the site. This view is used for navigating the robot by providing the user an all-round visual of the robot’s surroundings on the job site.
- 3.
- Floor Plan View—This view shows the robot’s current position on the floor plan of the building. This provides the user a bird’s eye view of the location being inspected.
- User—The user is the remote inspector or project stakeholder monitoring the project from a remote location.
5. Evaluation of the Proposed Framework for Remote Construction Progress Monitoring
5.1. Implementation Approach
5.1.1. Robotic Platform
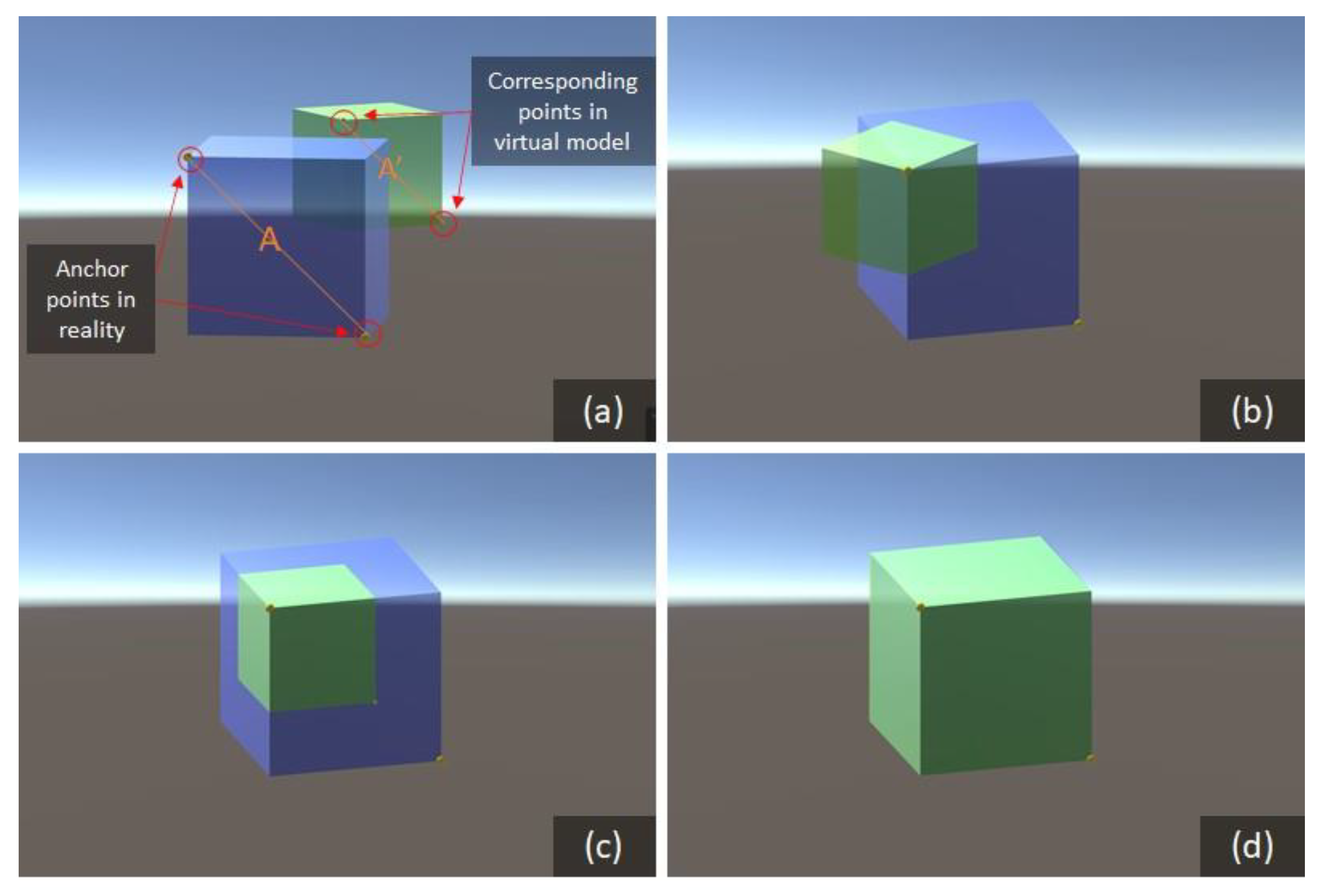
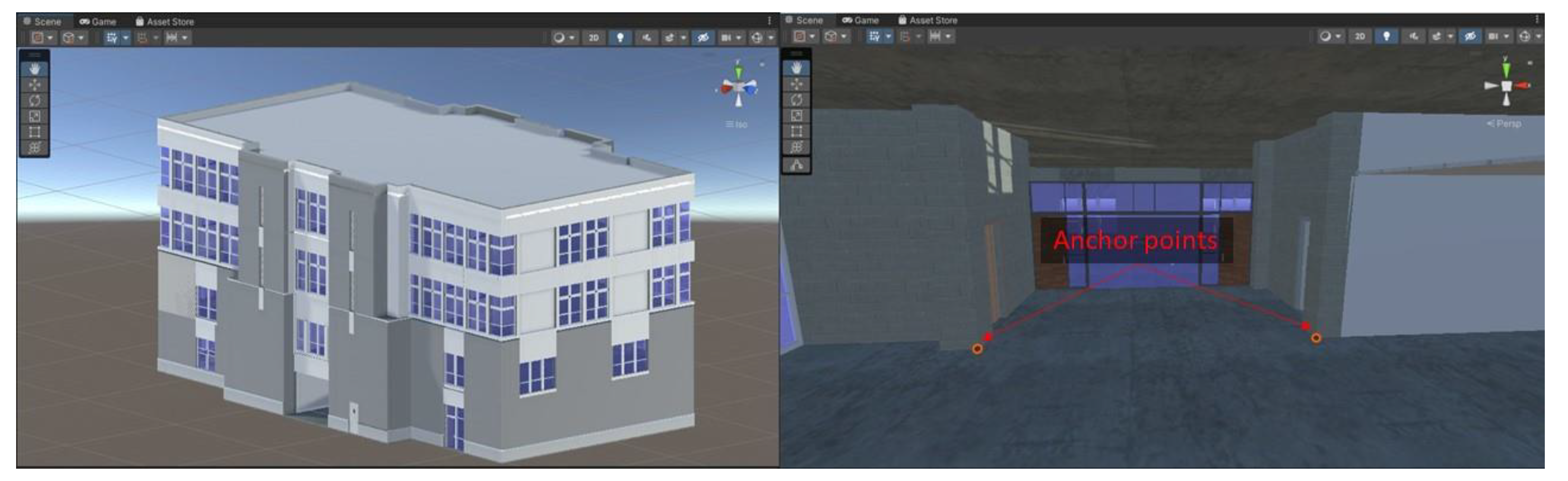
5.1.2. AR Model
5.1.3. Dataflow Architecture
5.1.4. User Interface
5.1.5. Optimization Strategy
5.2. Experimental Investigation
5.2.1. Use Case 1
5.2.2. Use Case 2
6. Discussion
7. Limitations and Future Work
8. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Golparvar-Fard, M.; Peña-Mora, F.; Savarese, S. D4AR-a 4-dimensional augmented reality model for automating construction progress monitoring data collection, processing and communication. J. Inf. Technol. Constr. 2009, 14, 129–153. [Google Scholar]
- Lin, J.J.; Golparvar-Fard, M. Visual and virtual progress monitoring in Construction 4.0. In Construction 4.0; Routledge: London, UK, 2020; pp. 240–263. [Google Scholar] [CrossRef]
- Alizadehsalehi, S.; Yitmen, I. A Concept for Automated Construction Progress Monitoring: Technologies Adoption for Benchmarking Project Performance Control. Arab. J. Sci. Eng. 2019, 44, 4993–5008. [Google Scholar] [CrossRef]
- Golparvar-Fard, M.; Peña-Mora, F.; Savarese, S. Automated Progress Monitoring Using Unordered Daily Construction Photographs and IFC-Based Building Information Models. J. Comput. Civ. Eng. 2015, 29, 4014025. [Google Scholar] [CrossRef]
- Khairadeen Ali, A.; Lee, O.J.; Lee, D.; Park, C. Remote Indoor Construction Progress Monitoring Using Extended Reality. Sustainability 2021, 13, 2290. [Google Scholar] [CrossRef]
- Mohamed, M.; Tran, D. Exploring the Use of Mobile Technologies for Highway Construction Inspection. In Proceedings of the Construction Research Congress, Arlington, VA, USA, 9–12 March 2022; pp. 689–697. [Google Scholar]
- Alirezaei, S.; Taghaddos, H.; Ghorab, K.; Tak, A.N.; Alirezaei, S. BIM-augmented reality integrated approach to risk management. Autom. Constr. 2022, 141, 104458. [Google Scholar] [CrossRef]
- Chi, H.L.; Kim, M.K.; Liu, K.Z.; Thedja, J.P.P.; Seo, J.; Lee, D.E. Rebar inspection integrating augmented reality and laser scanning. Autom. Constr. 2022, 136, 104183. [Google Scholar] [CrossRef]
- Albert, A.; Hallowell, M.R.; Kleiner, B.; Chen, A.; Golparvar-Fard, M. Enhancing Construction Hazard Recognition with HighFidelity Augmented Virtuality. J. Constr. Eng. Manag. 2014, 140, 04014024. [Google Scholar] [CrossRef]
- Behzadan, A.H.; Kamat, V.R. Enabling discovery-based learning in construction using telepresent augmented reality. Autom. Constr. 2013, 33, 3–10. [Google Scholar] [CrossRef]
- Wang, X.; Love, P.E.; Kim, M.J.; Wang, W. Mutual awareness in collaborative design: An Augmented Reality integrated telepresence system. Comput. Ind. 2014, 65, 314–324. [Google Scholar] [CrossRef]
- Ivanov, D. Mobile Robots Groups Use for Monitoring and Data Collection in Continuous Missions with Limited Communications. In Software Engineering Perspectives in Intelligent Systems; Silhavy, R., Silhavy, P., Prokopova, Z., Eds.; CoMeSySo 2020: Advances in Intelligent Systems and Computing; Springer: Berlin/Heidelberg, Germany, 2020; Volume 1294. [Google Scholar] [CrossRef]
- Afsari, K.; Gupta, S.; Afkhamiaghda, M.; Lu, Z. Applications of Collaborative Industrial Robots in Building Construction. In Proceedings of the 54th ASC Annual International Conference Proceedings, Minneapolis, MN, USA, 17–21 April 2018; pp. 472–479. [Google Scholar]
- Truong, P.; Hölttä-Otto, K.; Becerril, P.; Turtiainen, R.; Siltanen, S. Multi-User Virtual Reality for Remote Collaboration in Construction Projects: A Case Study with High-Rise Elevator Machine Room Planning. Electronics 2021, 10, 2806. [Google Scholar] [CrossRef]
- Tea, S.; Panuwatwanich, K.; Ruthankoon, R.; Kaewmoracharoen, M. Multiuser immersive virtual reality application for real-time remote collaboration to enhance design review process in the social distancing era. J. Eng. Des. Technol. 2022, 20, 281–298. [Google Scholar] [CrossRef]
- Kopsida, M.; Brilakis, I.; Vela, P. A Review of Automated Construction Progress and Inspection Methods. In Proceedings of the 32nd CIB W78 Conference on Construction IT, Eindhoven, The Netherlands, 26–29 October 2015; pp. 421–431. [Google Scholar]
- Zhang, C.; Arditi, D. Automated progress control using laser scanning technology. Autom. Constr. 2013, 36, 108–116. [Google Scholar] [CrossRef]
- Napolitano, R.; Blyth, A.; Glisic, B. Spherical imaging and virtual environments for structural health monitoring. In Proceedings of the SHMII 2017-8th International Conference on Structural Health Monitoring of Intelligent Infrastructure, Brisbane, Australia, 5–8 December 2017; pp. 398–404. [Google Scholar]
- Afsari, K.; Halder, S.; Ensafi, M.; De Vito, S.; Serdakowski, J. Fundamentals and Prospects of Four-Legged Robot Application in Construction Progress Monitoring. In Proceedings of the ASC International Proceedings of the Annual Conference, Online, 5–9 April 2021; pp. 271–278. [Google Scholar]
- Phillips, S.; Narasimhan, S. Automating Data Collection for Robotic Bridge Inspections. J. Bridge Eng. 2019, 24, 04019075. [Google Scholar] [CrossRef]
- Omar, H.; Mahdjoubi, L.; Kheder, G. Towards an automated photogrammetry-based approach for monitoring and controlling construction site activities. Comput. Ind. 2018, 98, 172–182. [Google Scholar] [CrossRef]
- Golparvar-Fard, M.; Asce, M.; Peña-Mora, F.; Savarese, S. Integrated Sequential As-Built and As-Planned Representation with D4AR Tools in Support of Decision-Making Tasks in the AEC/FM Industry. J. Constr. Eng. Manag. 2011, 137, 1099–1116. [Google Scholar] [CrossRef]
- Klein, L.; Li, N.; Becerik-Gerber, B. Imaged-based verification of as-built documentation of operational buildings. Autom. Constr. 2012, 21, 161–171. [Google Scholar] [CrossRef]
- Brilakis, I.; Soibelman, L. Content-Based Search Engines for construction image databases. Autom. Constr. 2005, 14, 537–550. [Google Scholar] [CrossRef]
- Chen, J.; Cho, Y.K. Point-to-point Comparison Method for Automated Scan-vs-BIM Deviation Detection. In Proceedings of the 17th International Conference on Computing in Civil and Building Engineering, Tampere, Finland, 5–7 June 2018. [Google Scholar]
- Du, J.; Shi, Y.; Zou, Z.; Zhao, D. CoVR: Cloud-based multiuser virtual reality headset system for project communication of remote users. J. Constr. Eng. Manag. 2018, 144, 4017109. [Google Scholar] [CrossRef]
- Lin, Z.; Petzold, F.; Ma, Z. A Real-Time 4D Augmented Reality System for Modular Construction Progress Monitoring. In Proceedings of the 36th International Symposium on Automation and Robotics in Construction (ISARC), Banff, AB, Canada, 21–24 May 2019; Al-Hussein, M., Ed.; Curran Associates, Inc.: Red Hook, NY, USA, 2019; pp. 743–748. [Google Scholar] [CrossRef]
- Halder, S.; Afsari, K. Real-time Construction Inspection in an Immersive Environment with an Inspector Assistant Robot. EPiC Ser. Built Environ. 2022, 3, 389–397. [Google Scholar] [CrossRef]
- Brito, C.; Alves, N.; Magalhães, L.; Guevara, M. BIM mixed reality tool for the inspection of heritage buildings. ISPRS Ann. Photogramm. Remote Sens. Spat. Inf. Sci. 2019, IV-2/W6, 25–29. [Google Scholar] [CrossRef]
- Ribeiro, D.; Santos, R.; Shibasaki, A.; Montenegro, P.; Carvalho, H.; Calçada, R. Remote inspection of RC structures using unmanned aerial vehicles and heuristic image processing. Eng. Fail. Anal. 2020, 117, 104813. [Google Scholar] [CrossRef]
- Pang, J. Analysis of Remote Quality Inspection System for Construction Projects. In Proceedings of the 13th International Conference on Enterprise Information Systems, Beijing, China, 8-11 June 2011; SciTePress-Science and Technology Publications: Setúbal, Portugal, 2011; pp. 341–344. [Google Scholar] [CrossRef][Green Version]
- Zhang, S.; Bogus Susan, M.; Lippitt Christopher, D.; Kamat, V.; Lee, S.H. Implementing Remote-Sensing Methodologies for Construction Research: An Unoccupied Airborne System Perspective. J. Constr. Eng. Manag. 2022, 148, 03122005. [Google Scholar] [CrossRef]
- Song, D.; Hu, Q.; Qin, N.; Goldberg, K. Automating inspection and documentation of remote building construction using a robotic camera. In Proceedings of the IEEE International Conference on Automation Science and Engineering, Edmonton, AB, Canada, 1–2 August 2005; pp. 172–177. [Google Scholar] [CrossRef][Green Version]
- Obradović, R.; Vasiljević, I.; Kovačević, D.; Marinković, Z.; Farkas, R. Drone Aided Inspection during Bridge Construction. In Proceedings of the 2019 Zooming Innovation in Consumer Technologies Conference (ZINC), Novi Sad, Serbia, 29–30 May 2019; pp. 1–4. [Google Scholar] [CrossRef]
- Mattioli, L.; Cardoso, A.; Lamounier, E. 2D–3D spatial registration for remote inspection of power substations. Energies 2020, 13, 6209. [Google Scholar] [CrossRef]
- Linn, C.; Bender, S.; Prosser, J.; Schmitt, K.; Werth, D. Virtual remote inspection—A new concept for virtual reality enhanced real-time maintenance. In Proceedings of the 2017 23rd International Conference on Virtual System & Multimedia (VSMM), Dublin, Ireland, October 31–November 4, 2017; IEEE: New York, NY, USA, 2017; pp. 1–6. [Google Scholar]
- Kim, K.; Kim, H.; Kim, H. Image-based construction hazard avoidance system using augmented reality in wearable device. Autom. Constr. 2017, 83, 390–403. [Google Scholar] [CrossRef]
- Wang, X. Using augmented reality to plan virtual construction worksite. Int. J. Adv. Robot. Syst. 2007, 4, 42. [Google Scholar] [CrossRef]
- Lin, T.H.; Liu, C.H.; Tsai, M.H.; Kang, S.C. Using augmented reality in a multiscreen environment for construction discussion. J. Comput. Civ. Eng. 2015, 29, 04014088. [Google Scholar] [CrossRef]
- Wang, X.; Dunston, P.S. Design, strategies, and issues towards an augmented reality-based construction training platform. J. Inf. Technol. Constr. 2007, 12, 363–380. [Google Scholar]
- Kwiatek, C.; Sharif, M.; Li, S.; Haas, C.; Walbridge, S. Impact of augmented reality and spatial cognition on assembly in construction. Autom. Constr. 2019, 108, 102935. [Google Scholar] [CrossRef]
- Behzadan, A.H.; Kamat, V.R. Integrated Information Modeling and Visual Simulation of Engineering Operations using Dynamic Augmented Reality Scene Graphs. ITcon 2011, 16, 259–278. [Google Scholar]
- Sangiorgio, V.; Martiradonna, S.; Fatiguso, F.; Lombillo, I. Augmented reality based-decision making (AR-DM) to support multi-criteria analysis in constructions. Autom. Constr. 2021, 124, 103567. [Google Scholar] [CrossRef]
- Dong, S.; Behzadan, A.H.; Chen, F.; Kamat, V.R. Collaborative visualization of engineering processes using tabletop augmented reality. Adv. Eng. Softw. 2013, 55, 45–55. [Google Scholar] [CrossRef]
- Hammad, A.; Wang, H.; Mudur, S.P. Distributed Augmented Reality for Visualizing Collaborative Construction Tasks. J. Comput. Civ. Eng. 2009, 23, 418–427. [Google Scholar] [CrossRef]
- Li, X.; Yi, W.; Chi, H.L.; Wang, X.; Chan, A.P. A critical review of virtual and augmented reality (VR/AR) applications in construction safety. Autom. Constr. 2018, 86, 150–162. [Google Scholar] [CrossRef]
- Bosché, F.; Abdel-Wahab, M.; Carozza, L. Towards a Mixed Reality System for Construction Trade Training. J. Comput. Civ. Eng. 2015, 30, 04015016. [Google Scholar] [CrossRef]
- Lin, T.J.; Duh, H.B.L.; Li, N.; Wang, H.Y.; Tsai, C.C. An investigation of learners’ collaborative knowledge construction performances and behavior patterns in an augmented reality simulation system. Comput. Educ. 2013, 68, 314–321. [Google Scholar] [CrossRef]
- Hou, L.; Wang, X.; Bernold, L.; Love, P.E.D. Using Animated Augmented Reality to Cognitively Guide Assembly. J. Comput. Civ. Eng. 2013, 27, 439–451. [Google Scholar] [CrossRef]
- Chalhoub, J.; Ayer, S.K. Using Mixed Reality for electrical construction design communication. Autom. Constr. 2018, 86, 1–10. [Google Scholar] [CrossRef]
- Bae, H.; Golparvar-Fard, M.; White, J. Image-Based Localization and Content Authoring in Structure-from-Motion Point Cloud Models for Real-Time Field Reporting Applications. J. Comput. Civ. Eng. 2014, 29, B4014008. [Google Scholar] [CrossRef]
- Yeh, K.C.; Tsai, M.H.; Kang, S.C. On-Site Building Information Retrieval by Using Projection-Based Augmented Reality. J. Comput. Civ. Eng. 2012, 26, 342–355. [Google Scholar] [CrossRef]
- Hatem, W.; Maula, B. Improving Project Monitoring by Integrating BIM with Augmented Reality. Int. Rev. Civ. Eng. 2020, 11, 2020. [Google Scholar] [CrossRef]
- Kopsida, M.; Brilakis, I. Real-Time Volume-to-Plane Comparison for Mixed Reality–Based Progress Monitoring. J. Comput. Civ. Eng. 2020, 34, 04020016. [Google Scholar] [CrossRef]
- Zaher, M.; Greenwood, D.; Marzouk, M. Mobile augmented reality applications for construction projects. Constr. Innov. 2018, 18, 152–166. [Google Scholar] [CrossRef]
- Soman, R.K.; Whyte, J.K. A Framework for Cloud-Based Virtual and Augmented Reality Using Real-Time Information for Construction Progress Monitoring. In Proceedings of the Joint Conference on Computing in Construction (JC3), Heraklion, Greece, 4–7 July 2017; pp. 833–840. [Google Scholar]
- Omar, T.; Nehdi, M.L. Data acquisition technologies for construction progress tracking. Autom. Constr. 2016, 70, 143–155. [Google Scholar] [CrossRef]
- Kwon, O.S.; Park, C.S.; Lim, C.R. A defect management system for reinforced concrete work utilizing BIM, image-matching and augmented reality. Autom. Constr. 2014, 46, 74–81. [Google Scholar] [CrossRef]
- Zollmann, S.; Hoppe, C.; Kluckner, S.; Poglitsch, C.; Bischof, H.; Reitmayr, G. Augmented Reality for Construction Site Monitoring and Documentation. Proc. IEEE 2014, 102, 137–154. [Google Scholar] [CrossRef]
- Shin, D.H.; Dunston, P.S. Evaluation of Augmented Reality in steel column inspection. Autom. Constr. 2009, 18, 118–129. [Google Scholar] [CrossRef]
- Navon, R.; Sacks, R. Assessing research issues in Automated Project Performance Control (APPC). Autom. Constr. 2007, 16, 474–484. [Google Scholar] [CrossRef]
- Zavadskas, E.K.; Vilutiene, T.; Turskis, Z.; Šaparauskas, J. Multi-criteria analysis of Projects’ performance in construction. Arch. Civ. Mech. Eng. 2014, 14, 114–121. [Google Scholar] [CrossRef]
- Navon, R. Research in automated measurement of project performance indicators. Autom. Constr. 2007, 16, 176–188. [Google Scholar] [CrossRef]
- Pučko, Z.; Šuman, N.; Rebolj, D. Automated continuous construction progress monitoring using multiple workplace real time 3D scans. Adv. Eng. Inform. 2018, 38, 27–40. [Google Scholar] [CrossRef]
- Alizadeh Salehi, S.; Yitmen, I. Modeling and analysis of the impact of BIM-based field data capturing technologies on automated construction progress monitoring. Int. J. Civ. Eng. 2018, 16, 1669–1685. [Google Scholar] [CrossRef]
- Kamaruddin, S.S.; Mohammad, M.F.; Mahbub, R. Barriers and impact of mechanisation and automation in construction to achieve better quality products. Procedia-Soc. Behav. Sci. 2016, 222, 111–120. [Google Scholar] [CrossRef]
- Khashayar, A.; Hariharan, R.; Mojtaba, N.; Kevin, H. Real-Time Image Localization and Registration with BIM Using Perspective Alignment for Indoor Monitoring of Construction. J. Comput. Civ. Eng. 2019, 33, 4019031. [Google Scholar] [CrossRef]
- Adán, A.; Quintana, B.; Prieto, S.A.; Bosché, F. An autonomous robotic platform for automatic extraction of detailed semantic models of buildings. Autom. Constr. 2020, 109, 102963. [Google Scholar] [CrossRef]
- Asadi, K.; Ramshankar, H.; Pullagurla, H.; Bhandare, A.; Shanbhag, S.; Mehta, P.; Kundu, S.; Han, K.; Lobaton, E.; Wu, T. Vision-based integrated mobile robotic system for real-time applications in construction. Autom. Constr. 2018, 96, 470–482. [Google Scholar] [CrossRef]
- Bang, S.; Kim, H.; Kim, H. UAV-based automatic generation of high-resolution panorama at a construction site with a focus on preprocessing for image stitching. Autom. Constr. 2017, 84, 70–80. [Google Scholar] [CrossRef]
- Lee, J.H.; Park, J.; Jang, B. Design of Robot based Work Progress Monitoring System for the Building Construction Site. In Proceedings of the 2018 International Conference on Information and Communication Technology Convergence (ICTC), Jeju Island, Republic of Korea, 17–19 October 2018; pp. 1420–1422. [Google Scholar]
- Prieto, S.A.; de Soto, B.; Adan, A. A Methodology to Monitor Construction Progress Using Autonomous Robots. In Proceedings of the 37th International Symposium on Automation and Robotics in Construction (ISARC), Kitakyushu, Japan, 27–28 October 2020; pp. 1515–1522. [Google Scholar]
- Siciliano, B.; Khatib, O. Robotics and the handbook. In Springer Handbook of Robotics; Springer International Publishing: Berlin/Heidelberg, Germany, 2016; pp. 1–6. [Google Scholar] [CrossRef]
- Lattanzi, D.; Miller, G. Review of robotic infrastructure inspection systems. J. Infrastruct. Syst. 2017, 23, 04017004. [Google Scholar] [CrossRef]
- Wang, B.; Chen, X.; Wang, Q.; Liu, L.; Zhang, H.; Li, B. Power line inspection with a flying robot. In Proceedings of the 2010 1st International Conference on Applied Robotics for the Power Industry, Montreal, QU, Canada, 5–7 October 2010; pp. 1–6. [Google Scholar] [CrossRef]
- Dios, J.R.M.D.; Ollero, A. Automatic Detection of Windows Thermal Heat Losses in Buildings Using UAVs. In Proceedings of the 2006 World Automation Congress, Dalian, China, 21–23 June 2006; pp. 1–6. [Google Scholar] [CrossRef]
- Whang, S.H.; Kim, D.H.; Kang, M.S.; Cho, K.; Park, S.; Son, W.H. Development of a Flying Robot System for Visual Inspection of Bridges. In Proceedings of the Ishmii- Int Soc Structural Health Monitoring Intelligent Infrastructure, Winnipeg, MB, Canada, 13 November 2007. [Google Scholar]
- Moud, H.I.; Zhang, X.; Flood, I.; Shojaei, A.; Zhang, Y.; Capano, C. Qualitative and Quantitative Risk Analysis of Unmanned Aerial Vehicle Flights on Construction Job Sites: A Case Study. Int. J. Adv. Intell. Syst. 2019, 12, 135–146. [Google Scholar]
- Siebert, S.; Teizer, J. Mobile 3D mapping for surveying earthwork projects using an Unmanned Aerial Vehicle (UAV) system. Autom. Constr. 2014, 41, 1–14. [Google Scholar] [CrossRef]
- Asadi, K.; Chen, P.; Han, K.; Wu, T.; Lobaton, E. Real-time scene segmentation using a light deep neural network architecture for autonomous robot navigation on construction sites. In Computing in Civil Engineering 2019: Data, Sensing, and Analytics; American Society of Civil Engineers: Reston, VA, USA, 2019; pp. 320–327. [Google Scholar]
- Ibrahim, A.; Sabet, A.; Golparvar-Fard, M. BIM-driven mission planning and navigation for automatic indoor construction progress detection using robotic ground platform. In Proceedings of the European Conference on Computing in Construction, Crete, Greece, 10–12 July 2019; pp. 10–12. [Google Scholar]
- Kreuzer, E.; Pinto, F.C. Sensing the Position of a Remotely Operated Underwater Vehicle. In Theory and Practice of Robots and Manipulators; Morecki, A., Bianchi, G., Jaworek, K., Eds.; Springer: Vienna, Australia, 1995; pp. 323–328. [Google Scholar]
- Brunete, A.; Hernando, M.; Torres, J.E.; Gambao, E. Heterogeneous multi-configurable chained microrobot for the exploration of small cavities. Autom. Constr. 2012, 21, 184–198. [Google Scholar] [CrossRef]
- Longo, D.; Muscato, G. Adhesion Control for the Alicia3 Climbing Robot. In Climbing and Walking Robots; Springer: Berlin/Heidelberg, Germany, 2005; pp. 1005–1015. [Google Scholar]
- Hwangbo, J.; Lee, J.; Dosovitskiy, A.; Bellicoso, D.; Tsounis, V.; Koltun, V.; Hutter, M. Learning agile and dynamic motor skills for legged robots. Sci. Robot. 2019, 4, eaau5872. [Google Scholar] [CrossRef]
- Faigl, J.; Cížek, P. Adaptive locomotion control of hexapod walking robot for traversing rough terrains with position feedback only. Robot. Auton. Syst. 2019, 116, 136–147. [Google Scholar] [CrossRef]
- Lin, J.L.; Hwang, K.S.; Jiang, W.C.; Chen, Y.J. Gait balance and acceleration of a biped robot based on Q-learning. IEEE Access 2016, 4, 2439–2449. [Google Scholar] [CrossRef]
- Grandia, R.; Taylor, A.J.; Ames, A.D.; Hutter, M. Multi-layered safety for legged robots via control barrier functions and model predictive control. In Proceedings of the IEEE International Conference on Robotics and Automation (ICRA), Xi’an, China, 31 May–4 June 2021. [Google Scholar]
- Hutter, M.; Gehring, C.; Lauber, A.; Gunther, F.; Bellicoso, C.D.; Tsounis, V.; Fankhauser, P.; Diethelm, R.; Bachmann, S.; Bloesch, M.; et al. ANYmal-toward legged robots for harsh environments. Adv. Robot. 2017, 31, 918–931. [Google Scholar] [CrossRef]
- Ibrahim, A.; Roberts, D.; Golparvar-Fard, M.; Bretl, T. An Interactive Model-Driven Path Planning and Data Capture System for Camera-Equipped Aerial Robots on Construction Sites. In Proceedings of the ASCE International Workshop on Computing in Civil Engineering 2017, Seattle, WA, USA, 25–27 June, 2017; American Society of Civil Engineers (ASCE): Reston, VA, USA, 2017; pp. 117–124. [Google Scholar] [CrossRef]
- Phung, M.D.; Quach, C.H.; Dinh, T.H.; Ha, Q. Enhanced discrete particle swarm optimization path planning for UAV vision-based surface inspection. Autom. Constr. 2017, 81, 25–33. [Google Scholar] [CrossRef]
- Halder, S.; Afsari, K.; Serdakowski, J.; DeVito, S.; King, R. Accuracy Estimation for Autonomous Navigation of a Quadruped Robot in Construction Progress Monitoring. In Proceedings of the 2021 ASCE International Conference on Computing in Civil Engineering, Orlando, FL, USA, 12–14 September 2021. [Google Scholar]
- Boston Dynamics. Spot User Guide: Release 2.0; Boston Dynamics: Waltham, MA, USA, 2021. [Google Scholar]
- Boston Dynamics. Spot SDK. 2022. Available online: https://dev.bostondynamics.com/ (accessed on 6 June 2022).
- Ricoh Company Ltd. Ricoh Theta V. 2017. Available online: https://theta360.com/en/about/theta/v.html (accessed on 6 June 2022).
- Sakib, N.; Gresham, J.; Woolsey, C.A. Usability Studies of a Predictive Heterogeneous Vision System in Mitigating the Effects of Visual Display Delay. In Proceedings of the AIAA Scitech 2021 Forum, Online, 19–21 January 2021; p. 17. [Google Scholar]
- Richter, F.; Zhang, Y.; Zhi, Y.; Orosco, R.K.; Yip, M.C. Augmented reality predictive displays to help mitigate the effects of delayed telesurgery. In Proceedings of the 2019 International Conference on Robotics and Automation (ICRA), Montreal, Canada, 20–24 May 2019; pp. 444–450. [Google Scholar]
- Windau, J.; Itti, L. Multilayer real-time video image stabilization. In Proceedings of the 2011 IEEE/RSJ International Conference on Intelligent Robots and Systems, San Francisco, CA, USA, 25–30 September 2011; pp. 2397–2402. [Google Scholar] [CrossRef]
- Halder, S.; Afsari, K.; Serdakowski, J.; De Vito, S. A Methodology for BIM-enabled Automated Reality Capture in Construction Inspection with Quadruped Robots. In Proceedings of the 38th International Symposium on Automation and Robotics in Construction (ISARC), Dubai, United Arab Emirates, 2–4 November 2021; pp. 17–24. [Google Scholar]















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Comments | Description | Related to |
|---|---|---|
| “Camera is really shaky” | Walking motion of the robot degrades the quality of the visuals. | Hardware |
| “Having the ability to zoom-in would be helpful” | Height of the robot prevents it from getting close to certain objects. Zooming feature in the camera is required. | Software |
| “I get dizzy watching from the camera on Spot” | Virtual inspection can impact cognitive workload of the inspector. | Hardware |
| “Spot has a blind spot near the back knees” | Obstacle avoidance system of the robot cannot be completely reliable. | Hardware |
| “It is helpful to be able to see the BIM model in the AR app” | AR is preferable over plain reality capture. | Software |
| “It would be good if we can select the components of the BIM model and see the component specs” | Mixed Reality can provide a better solution than an AR view. | Software |
| “Having a 4D BIM would aid the remote monitoring” | Schedule should be integrated in the BIM model in addition to the 3D geometry. | Software |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Halder, S.; Afsari, K.; Serdakowski, J.; DeVito, S.; Ensafi, M.; Thabet, W. Real-Time and Remote Construction Progress Monitoring with a Quadruped Robot Using Augmented Reality. Buildings 2022, 12, 2027. https://doi.org/10.3390/buildings12112027
Halder S, Afsari K, Serdakowski J, DeVito S, Ensafi M, Thabet W. Real-Time and Remote Construction Progress Monitoring with a Quadruped Robot Using Augmented Reality. Buildings. 2022; 12(11):2027. https://doi.org/10.3390/buildings12112027
Chicago/Turabian StyleHalder, Srijeet, Kereshmeh Afsari, John Serdakowski, Stephen DeVito, Mahnaz Ensafi, and Walid Thabet. 2022. "Real-Time and Remote Construction Progress Monitoring with a Quadruped Robot Using Augmented Reality" Buildings 12, no. 11: 2027. https://doi.org/10.3390/buildings12112027
APA StyleHalder, S., Afsari, K., Serdakowski, J., DeVito, S., Ensafi, M., & Thabet, W. (2022). Real-Time and Remote Construction Progress Monitoring with a Quadruped Robot Using Augmented Reality. Buildings, 12(11), 2027. https://doi.org/10.3390/buildings12112027