
Train-Induced Vibration Predictions Based on Data-Driven Cascaded State-Space Model



Abstract
:1. Introduction
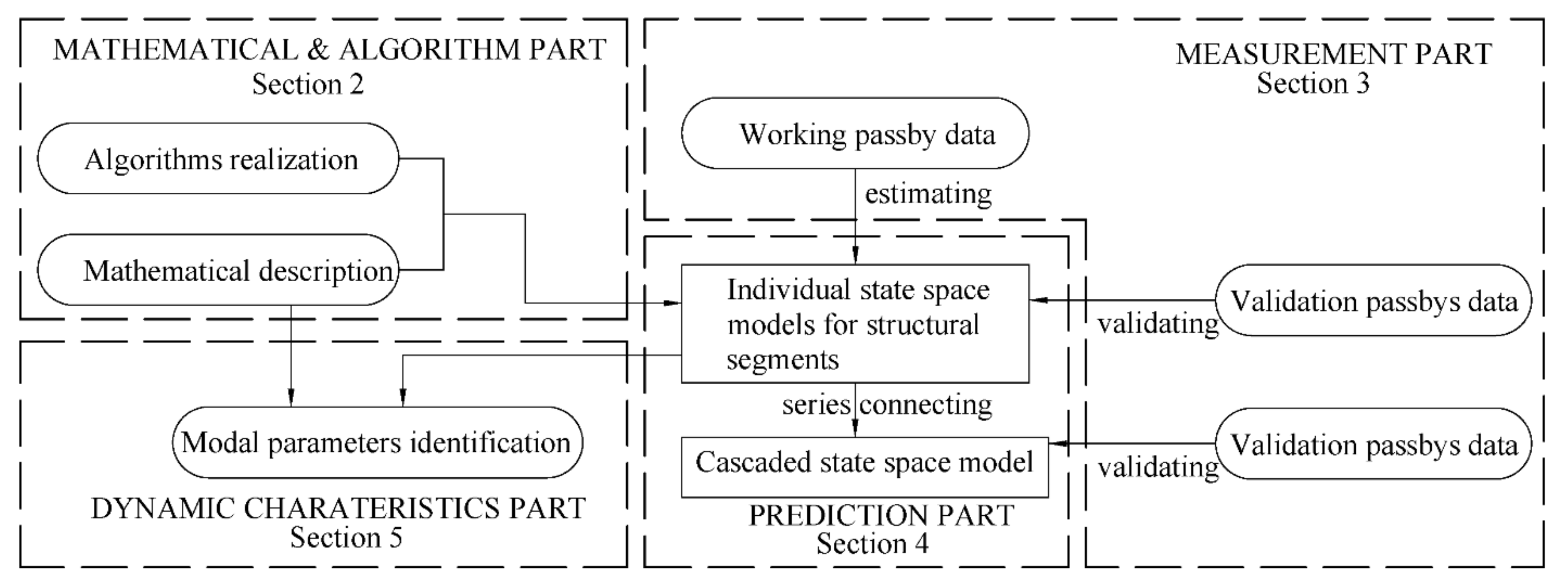
2. Prediction Method Based on State-Space Model
2.1. Modeling Procedure
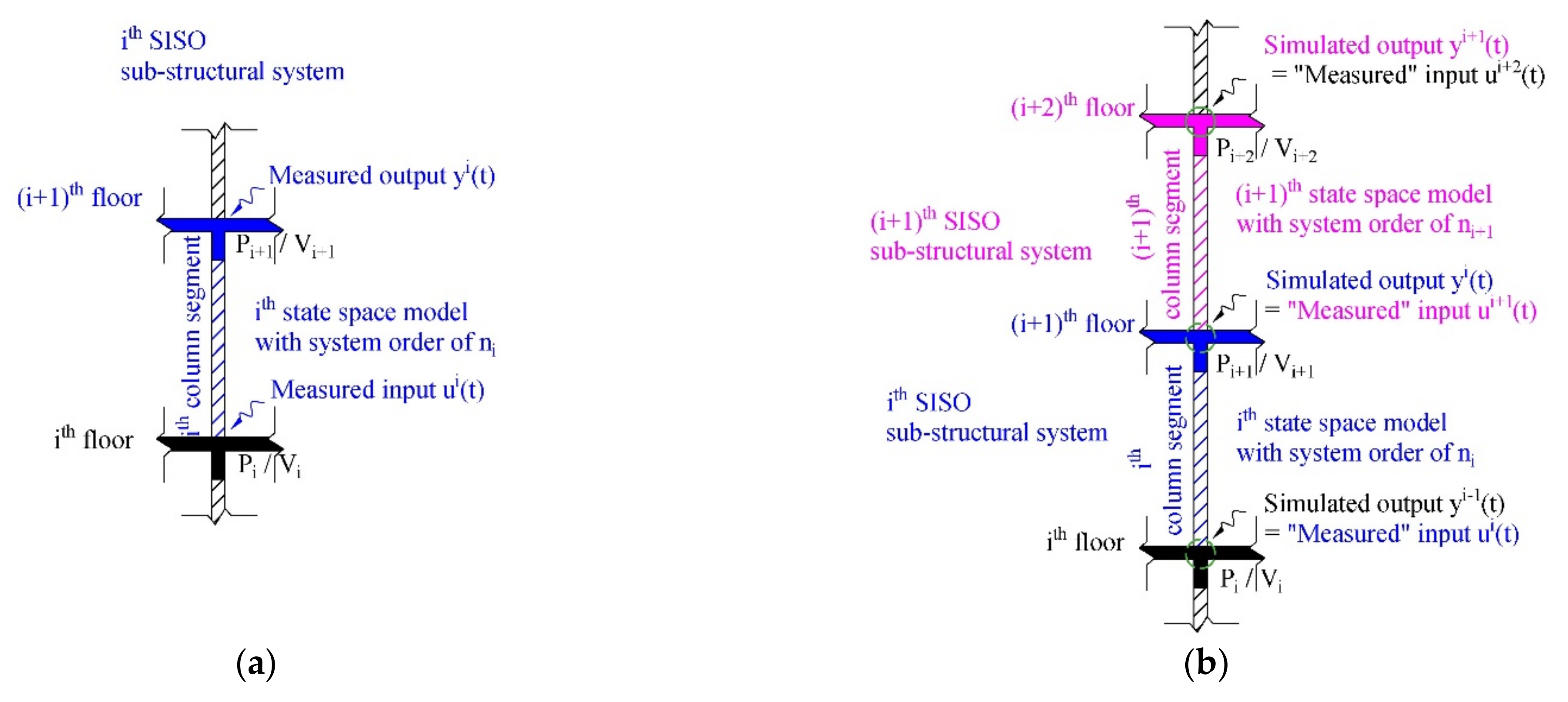
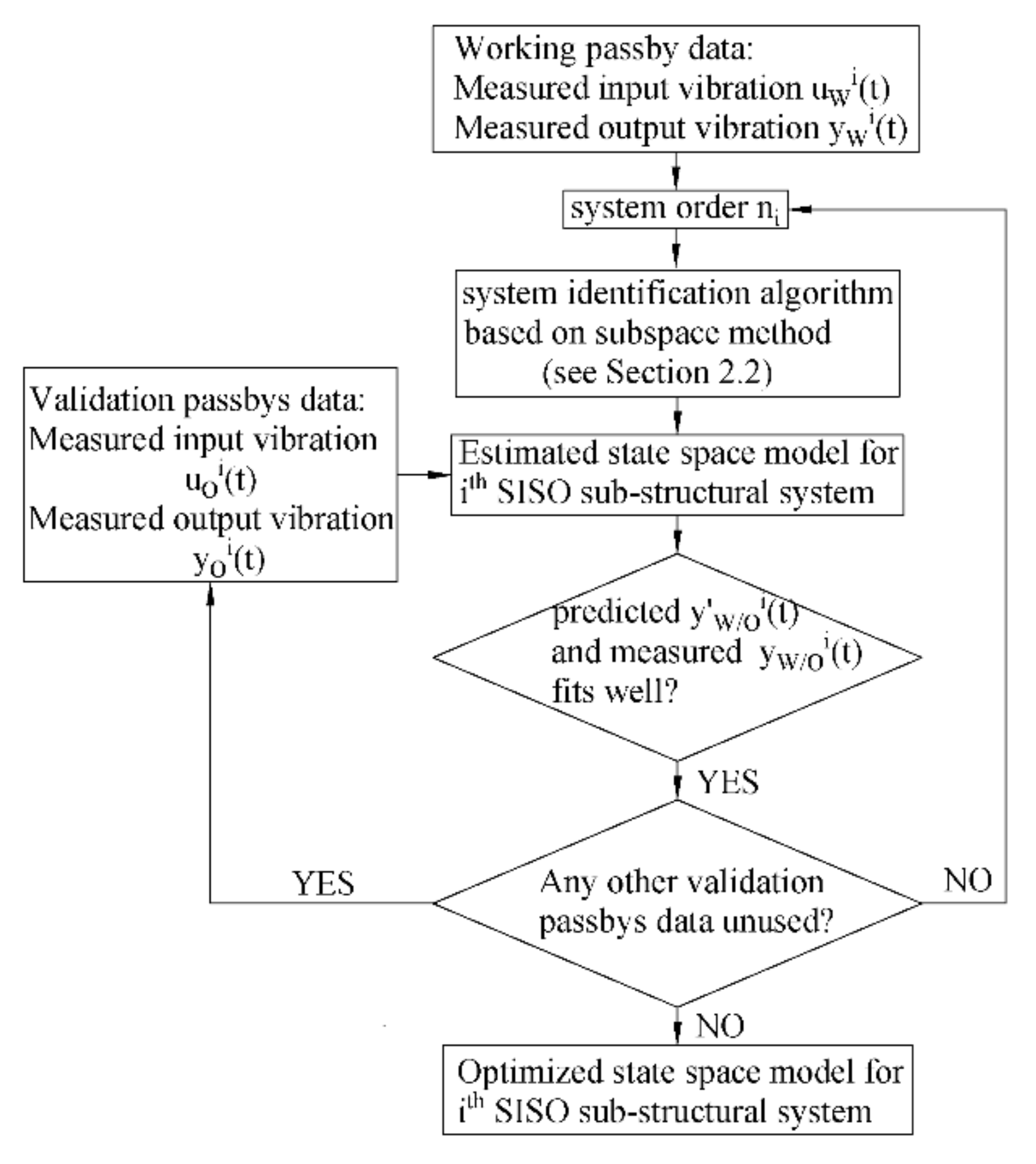
2.2. Sub-Structural System Identification
3. Train-Induced Vibration Measurements
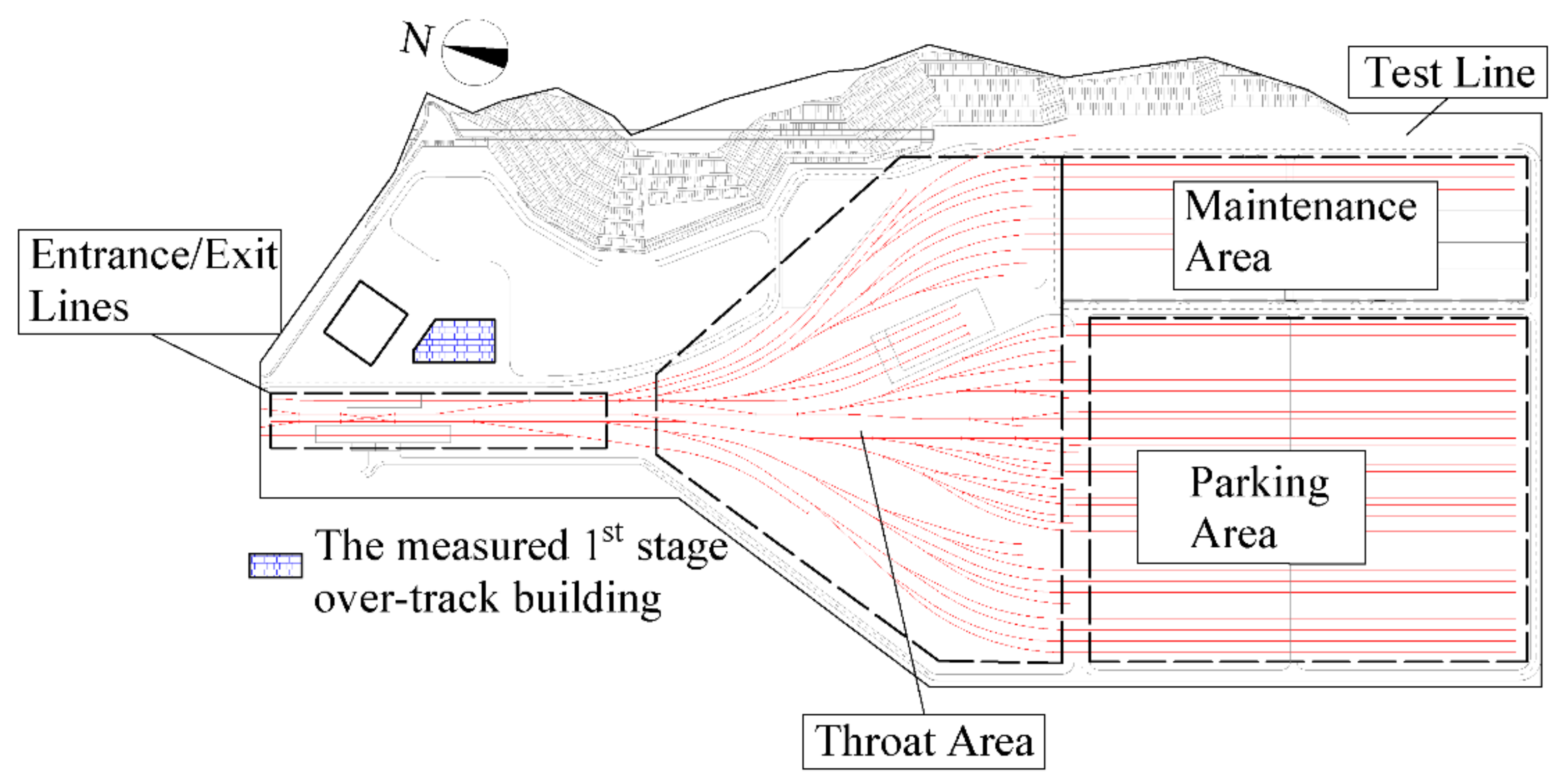
3.1. Measurement Program
3.1.1. Location
3.1.2. Setup
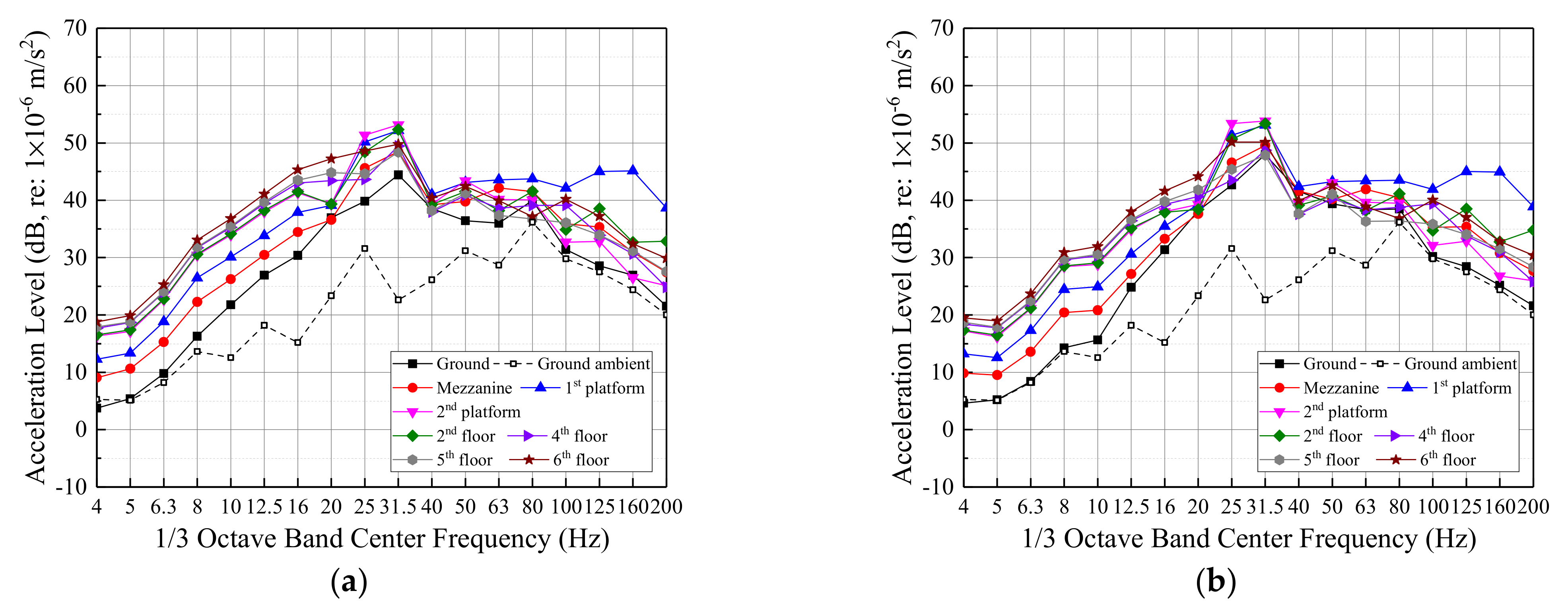
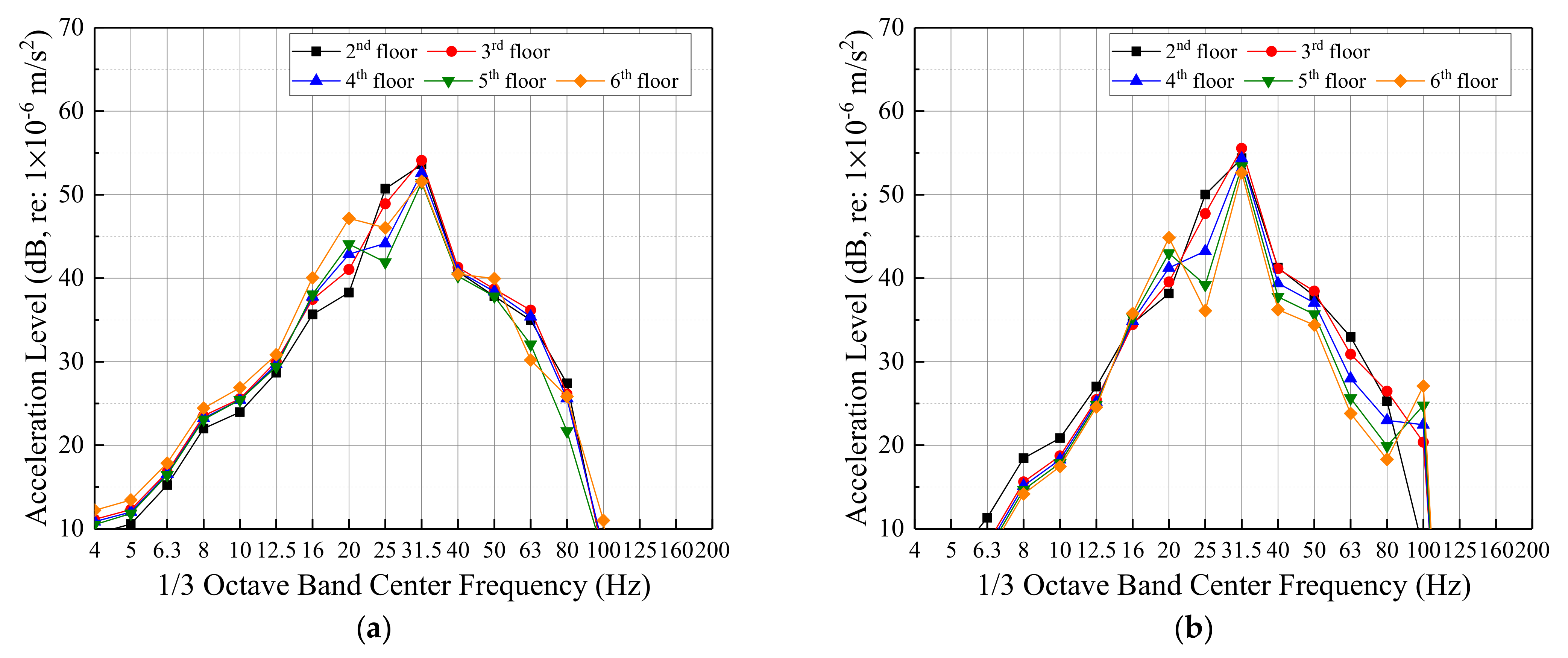
3.2. Vertical Vibration Levels on Different Floors in the First Stage Over-Track Building
3.2.1. Room Column
3.2.2. Staircase Column
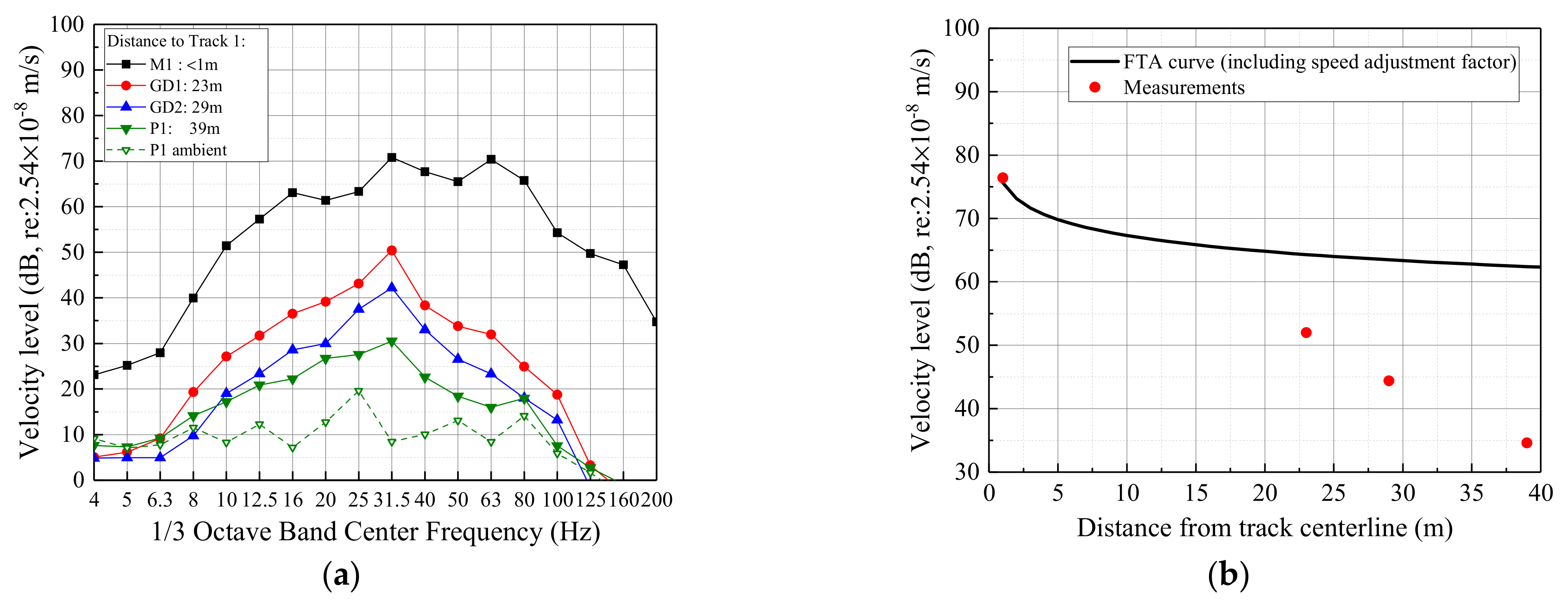
3.3. Ground Vibration Levels at Different Distances from the Track
3.4. Different Vibration Transmissions from Ground to First Platfrom
4. Train-Induced Vibration Simulations and Predictions
4.1. Model Versatility for Typical Floors
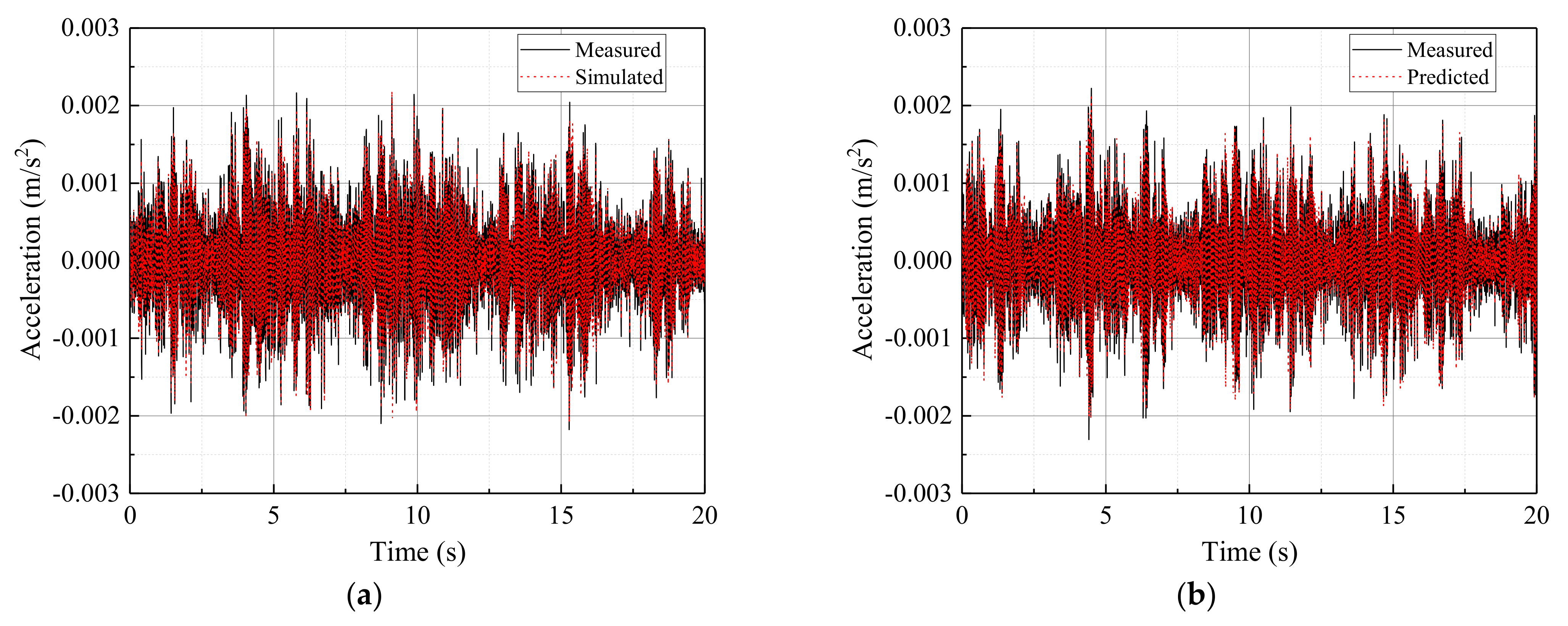
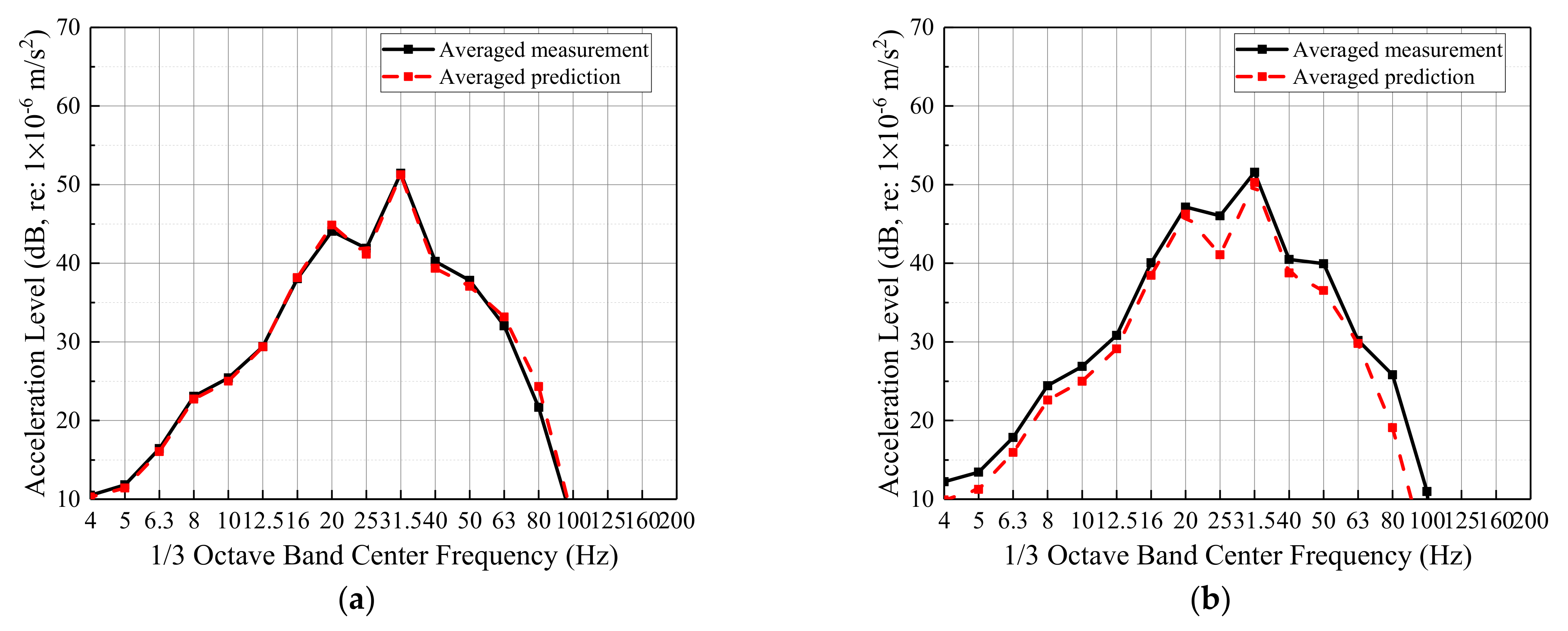
4.2. Cascaded State-Space Model Validation
4.3. Vibration Predictions for the Future Second Stage Over-Track Building
5. Modal Parameters Identification
6. Discussion
6.1. Vibration Transmission within the First Stage Over-Track Building
6.2. Comparison between Measurements and FTA Guidelines
6.3. Selection of State-Space Model System Order
6.4. Significance of the Cascaded State-Space Model
7. Conclusions
- (1)
- The data-driven cascaded state-space model predicts train-induced structural vibration responses with reasonable accuracy. It provides a practical method to assess train-induced vibration impacts prior to construction when designing similar buildings at metro depots in the future.
- (2)
- The system order of the estimated state-space model is related to the structural system complexity. In general, the more complex the system, the greater the system order.
- (3)
- Considering over-track buildings’ different supporting methods, it is advisable to use the measured vibration levels from the second platform as the inputs to the cascaded state-space model, which avoids the added complexity of modeling the transfer behavior of the platform and expands the applicability of the model.
- (4)
- Vibration levels within the first stage over-track building were amplified by 2–4 dB/floor from the first platform and barely reduced from one floor to the floor above. The FTA guidelines overestimate the vibration transmission loss within buildings.
- (5)
- The FTA propagation curve for rapid transit and light rail vehicles effectively estimates vibration levels near the track. However, it underestimates the vibration transmission loss when the distance to the track’s centerline increases.
Author Contributions
Funding
Institutional Review Board Statement
Data Availability Statement
Conflicts of Interest
References
- Lin, D.; Nelson, J.D.; Beecroft, M.; Cui, J. An overview of recent developments in China’s metro systems. Tunn. Undergr. Space Technol. 2021, 111, 103783. [Google Scholar] [CrossRef]
- Tao, Z.Y.; Zou, C.; Wang, Y.M.; Wu, J. Vibration transmissions and predictions within low-rise buildings above throat area in the metro depot. J. Vib. Control 2021, 10775463211057644. [Google Scholar] [CrossRef]
- Tao, Z.Y.; Wang, Y.M.; Zou, C.; Li, Q.; Luo, Y. Assessment of ventilation noise impact from metro depot with over-track platform structure on workers and nearby inhabitants. Environ. Sci. Pollut. Res. 2019, 26, 9203–9218. [Google Scholar] [CrossRef]
- Connolly, D.P.; Marecki, G.P.; Kouroussis, G.; Thalassinakis, I.; Woodward, P.K. The growth of railway ground vibration problems—A review. Sci. Total Environ. 2016, 568, 1276–1282. [Google Scholar] [CrossRef] [PubMed]
- Ma, M.; Jiang, B.; Gao, J.; Liu, W. Experimental study on attenuation zone of soil-periodic piles system. Earthq. Eng. Struct. Dyn. 2019, 126, 105738. [Google Scholar] [CrossRef]
- Kouroussis, G.; Conti, C.; Verlinden, O. Experimental study of ground vibrations induced by Brussels IC/IR trains in their neighborhood. Mech. Ind. 2013, 14, 99–105. [Google Scholar] [CrossRef]
- Connolly, D.P.; Kouroussis, G.; Woodward, P.K.; Costa, P.A.; Verlinden, O.; Forde, M.C. Field testing and analysis of high speed rail vibrations. Soil Dyn. Earthq. Eng. 2014, 67, 102–118. [Google Scholar] [CrossRef] [Green Version]
- Connolly, D.P.; Costa, P.A.; Kouroussis, G.; Galvin, P.; Woodward, P.K.; Laghrouche, O. Large scale international testing of railway ground vibrations across Europe. Soil Dyn. Earthq. Eng. 2015, 71, 1–12. [Google Scholar] [CrossRef] [Green Version]
- Xia, H.; Chen, J.; Wei, P.; Xia, C.; De Roeck, G.; Degrande, G. Experimental investigation of railway train-induced vibrations of surrounding ground and a nearby multi-story building. Earthq. Eng. Eng. Vib. 2009, 8, 137–148. [Google Scholar] [CrossRef]
- Sanayei, M.; Maurya, P.; Moore, J.A. Measurement of building foundation and ground-borne vibrations due to surface trains and subways. Eng. Struct. 2013, 53, 102–111. [Google Scholar] [CrossRef]
- Sanayei, M.; Moore, J.A.; Brett, C.R. Measurement and prediction of train-induced vibrations in a full-scale building. Eng. Struct. 2014, 77, 119–128. [Google Scholar] [CrossRef]
- Zou, C.; Wang, Y.M.; Wang, P.; Guo, J.X. Measurement of ground and nearby building vibration and noise induced by trains in a metro depot. Sci. Total Environ. 2015, 536, 761–773. [Google Scholar] [CrossRef] [PubMed]
- Zou, C.; Wang, Y.M.; Moore, J.A.; Sanayei, M. Train-induced field vibration measurements of ground and over-track buildings. Sci. Total Environ. 2017, 575, 1339–1351. [Google Scholar] [CrossRef]
- Tao, Z.Y.; Wang, Y.M.; Sanayei, M.; Moore, J.A.; Zou, C. Experimental study of train-induced vibration in over-track buildings in a metro depot. Eng. Struct. 2019, 198, 109473. [Google Scholar] [CrossRef]
- Cao, Z.L.; Guo, T.; Zhang, Z.Q.; Li, A.Q. Measurement and analysis of vibrations in a residential building constructed on an elevated metro depot. Measurement 2018, 125, 394–405. [Google Scholar] [CrossRef]
- He, W.; Zou, C.; Pang, Y.; Wang, X. Environmental noise and vibration characteristics of rubber-spring floating slab track. Environ. Sci. Pollut. Res. 2021, 28, 13671–13689. [Google Scholar] [CrossRef]
- Verbraken, H.; Lombaert, G.; Degrande, G. Verification of an empirical prediction method for railway induced vibrations by means of numerical simulations. J. Sound Vib. 2011, 330, 1692–1703. [Google Scholar] [CrossRef]
- Zhai, W.M.; Wang, K.Y.; Cai, C.B. Fundamentals of vehicle–track coupled dynamics. Veh. Syst. Dyn. 2009, 47, 1349–1376. [Google Scholar] [CrossRef]
- Yang, J.J.; Zhu, S.Y.; Zhai, W.M.; Kouroussis, G.; Wang, Y.; Wang, K.Y.; Lan, K.; Xu, F.Z. Prediction and mitigation of train-induced vibrations of large-scale building constructed on subway tunnel. Sci. Total Environ. 2019, 668, 485–499. [Google Scholar] [CrossRef]
- Jin, H.; Tian, Q.; Li, Z.; Wang, Z. Ability of vibration control using rubberized concrete for tunnel invert-filling. Constr. Build. Mater. 2022, 317, 125932. [Google Scholar] [CrossRef]
- Lopes, P.; Costa, P.A.; Ferraz, M.; Calçada, R.; Cardoso, A.S. Numerical modeling of vibrations induced by railway traffic in tunnels: From the source to the nearby buildings. Soil Dyn. Earthq. Eng. 2014, 61–62, 269–285. [Google Scholar] [CrossRef]
- Xia, H.; Zhang, N.; Cao, Y.M. Experimental study of train-induced vibrations of environments and buildings. J. Sound Vib. 2005, 280, 1017–1029. [Google Scholar] [CrossRef]
- Kuo, K.A.; Papadopoulos, M.; Lombaert, G.; Degrande, G. The coupling loss of a building subject to railway induced vibrations: Numerical modelling and experimental measurements. J. Sound Vib. 2019, 442, 459–481. [Google Scholar] [CrossRef]
- Xu, L.; Ma, M.; Cao, R.; Tan, X.; Liang, R. Effect of longitudinally varying characteristics of soil on metro train-induced ground vibrations based on wave propagation analysis. Soil Dyn. Earthq. Eng. 2022, 152, 107020. [Google Scholar] [CrossRef]
- François, S.; Schevenels, M.; Galvín, P.; Lombaert, G.; Degrande, G. A 2.5 D coupled FE–BE methodology for the dynamic interaction between longitudinally invariant structures and a layered halfspace. Comput. Methods Appl. Mech. Eng. 2010, 199, 1536–1548. [Google Scholar] [CrossRef]
- Liang, X.; Yang, Y.B.; Ge, P.; Hung, H.H.; Wu, Y. On computation of soil vibrations due to moving train loads by 2.5 D approach. Soil Dyn. Earthq. Eng. 2017, 101, 204–208. [Google Scholar] [CrossRef]
- Katou, M.; Matsuoka, T.; Yoshioka, O.; Sanada, Y.; Miyoshi, T. Numerical simulation study of ground vibrations using forces from wheels of a running high-speed train. J. Sound Vib. 2008, 318, 830–849. [Google Scholar] [CrossRef]
- Sanayei, M.; Zhao, N.; Maurya, P.; Moore, J.A.; Zapfe, J.A.; Hines, E.M. Prediction and mitigation of building floor vibrations using a blocking floor. J. Struct. Eng. 2012, 138, 1181–1192. [Google Scholar] [CrossRef]
- Zou, C.; Moore, J.A.; Sanayei, M.; Wang, Y.M.; Tao, Z.Y. Efficient impedance model for the estimation of train-induced vibrations in over-track buildings. J. Vib. Control 2020, 27, 924–942. [Google Scholar] [CrossRef]
- Zou, C.; Moore, J.A.; Sanayei, M.; Wang, Y.M. Impedance model for estimating train-induced building vibrations. Eng. Struct. 2018, 172, 739–750. [Google Scholar] [CrossRef]
- Richart, F.E.; Hall, J.R.; Wood, R.D. Vibrations of Soils and Foundations; Prentice Hall: Englewood Cliffs, NJ, USA, 1970. [Google Scholar]
- Kim, J.; Lynch, J.P. Subspace system identification of support excited structures—Part I: Theory and black-box system identification. Earthq. Eng. Struct. Dyn. 2012, 41, 2235–2251. [Google Scholar] [CrossRef] [Green Version]
- Verhaegen, M. Identification of the deterministic part of MIMO state-space models given in innovations form from input-output data. Automatica 1994, 30, 61–74. [Google Scholar] [CrossRef]
- Viberg, M. Subspace-based methods for the identification of linear time-invariant systems. Automatica 1995, 31, 1835–1851. [Google Scholar] [CrossRef]
- Ho, B.L.; Kalman, R.E. Effective construction of linear state-variable models from input-output functions. Regelungtechnik 1965, 12, 545–548. [Google Scholar]
- Peeters, B.; Ventura, C.E. Comparative study of modal analysis techniques for bridge dynamic characteristics. Mech. Syst. Signal Process. 2003, 17, 965–988. [Google Scholar] [CrossRef]
- Van Overschee, P.; De Moor, B. N4SID: Subspace algorithms for the identification of combined deterministic-stochastic systems. Automatica 1994, 30, 75–93. [Google Scholar] [CrossRef]
- Van Overschee, P.; De Moor, B. Subspace algorithm for the stochastic identification problem. Automatica 1993, 29, 649–660. [Google Scholar] [CrossRef]
- Viberg, M.; Ottersten, B.; Wahlberg, B.; Ljung, L. Performance of Subspace-Based System Identification Methods. In Proceedings of the 12th Federation of Automatic Control Symposium System Identification (IFAC SYSID), Sydney, Australia, 18–23 July 1993. [Google Scholar]
- JGJ/T 170-2009; Standard for Limit and Measuring Method of Building Vibration and Secondary Noise Caused by Urban Rail Transit. Ministry of Housing and Urban-Rural Development of the People’s Republic of China: Beijing, China, 2009.
- Federal Transit Administration. Transit Noise and Vibration Impact Assessment Manual; U.S. Department of Transportation: Washington, DC, USA, 2018.










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Level | Length (m) | Cross Area (m2) | Young’s Modulus (GPa) | Density (kg/m3) | Floor Thickness (m) |
|---|---|---|---|---|---|
| Ground–Mezzanine | 4.45 | 0.64 | 36.0 | 2440 | -- |
| Mezzanine–1st platform | 4.4 | 35.5 | 2430 | 0.12 | |
| 1st platform–2nd platform | 5.5 | 34.5 | 2420 | 0.15 | |
| 2nd platform–2nd floor | 5.95 | 33.5 | 2410 | 0.25 | |
| 2nd floor–3rd floor | 3.6 | 32.5 | 2400 | 0.12 | |
| Upper floors | 3.6 | 31.5 | 2390 | 0.12 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Tao, Z.; Hu, Z.; Wu, G.; Huang, C.; Zou, C.; Ying, Z. Train-Induced Vibration Predictions Based on Data-Driven Cascaded State-Space Model. Buildings 2022, 12, 114. https://doi.org/10.3390/buildings12020114
Tao Z, Hu Z, Wu G, Huang C, Zou C, Ying Z. Train-Induced Vibration Predictions Based on Data-Driven Cascaded State-Space Model. Buildings. 2022; 12(2):114. https://doi.org/10.3390/buildings12020114
Chicago/Turabian StyleTao, Ziyu, Zihao Hu, Ganming Wu, Conghui Huang, Chao Zou, and Zhiyun Ying. 2022. "Train-Induced Vibration Predictions Based on Data-Driven Cascaded State-Space Model" Buildings 12, no. 2: 114. https://doi.org/10.3390/buildings12020114
APA StyleTao, Z., Hu, Z., Wu, G., Huang, C., Zou, C., & Ying, Z. (2022). Train-Induced Vibration Predictions Based on Data-Driven Cascaded State-Space Model. Buildings, 12(2), 114. https://doi.org/10.3390/buildings12020114