
Construction Robotics and Human–Robot Teams Research Methods


Abstract
:1. Introduction
Components of the Research Process, from Conceptualisation to Research Methods
- How has construction robotics research evolved, and what are the key thematic areas?
- What types of research methods are employed in the construction robotics and human–robot teams literature?
- What is the use of theories and conceptual frameworks in the construction robotics literature like?
- What research designs, data sources and analytical techniques are employed in the construction robotics and human–robot teams literature?
- What is the nature of the relationships between key components of the research methods in the construction robotics and human–robot teams literature?
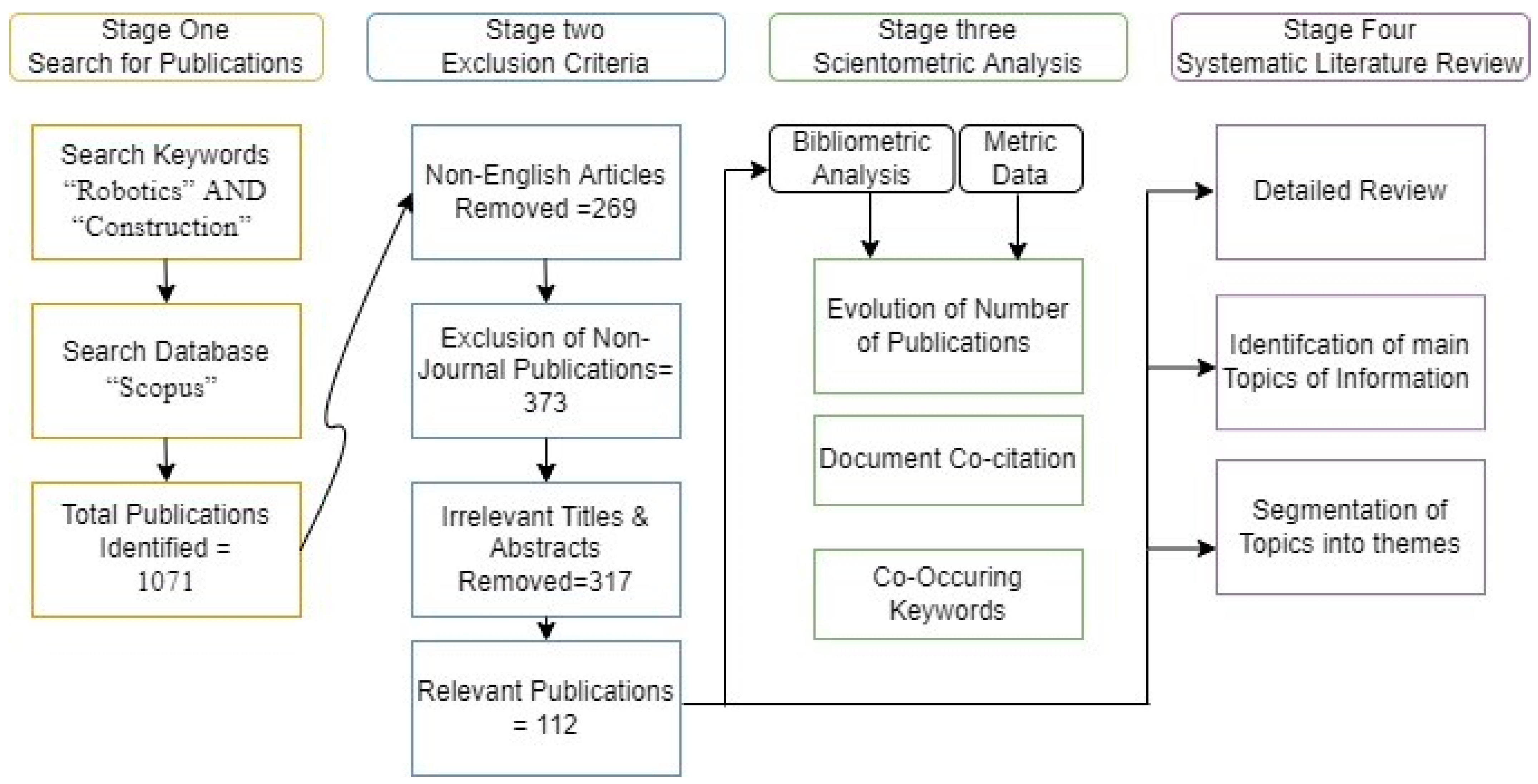
2. Research Method
2.1. Stage One: Search for Publication
2.2. Stage Two: Exclusion Criteria
2.3. Stage Three: A Scientometric Analysis
2.4. Stage Four: Systematic Literature Review
- i.
- The identified research themes and methods;
- ii.
- The types of research methods;
- iii.
- The use of theories and conceptual frameworks in the construction robotics literature;
- iv.
- The research designs employed in the construction robotics and human–robot teams literature;
- v.
- The data sources used in the construction robotics and human–robot teams literature;
- vi.
- The analytical techniques used in the construction robotics and human–robot teams literature;
- vii.
- Analysing the relationships between key components of the methodologies in the construction robotics and human–robot teams literature.
3. Results
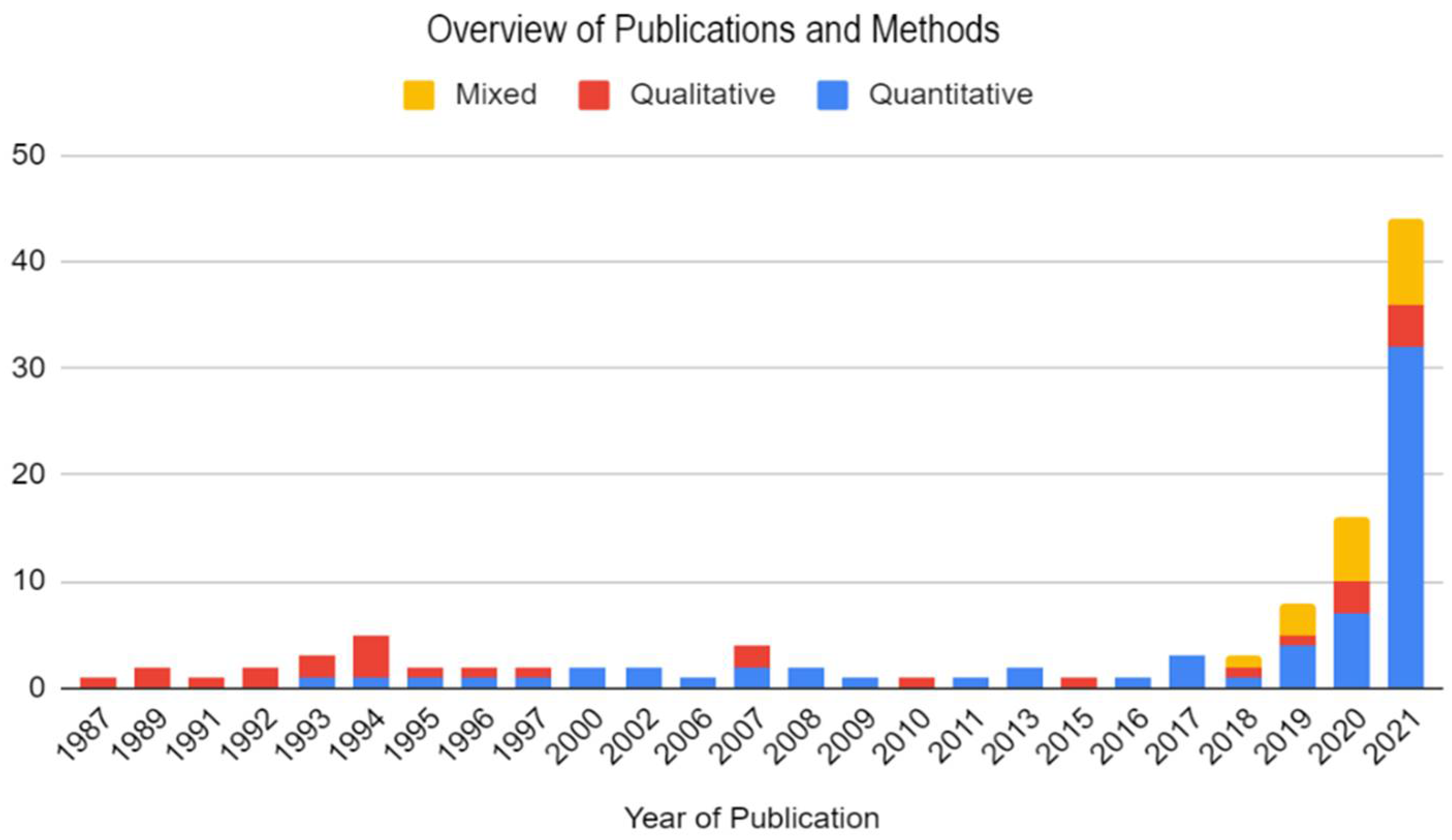
3.1. Overview of Publications and Methods
3.2. Most-Cited Publications
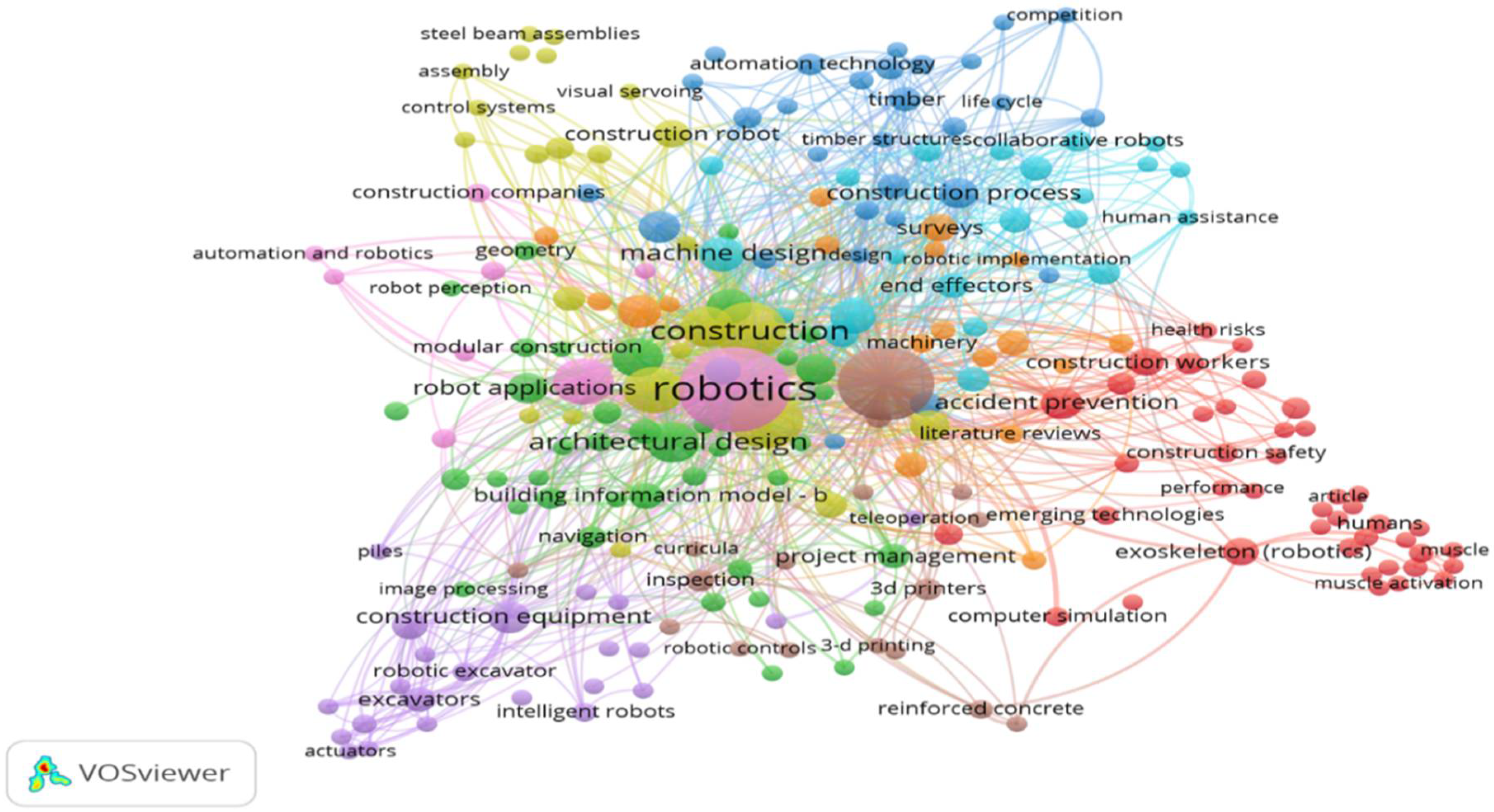
3.3. Co-Occurring Keywords
3.4. Contextualising the Methodologies Used in the Reviewed Articles
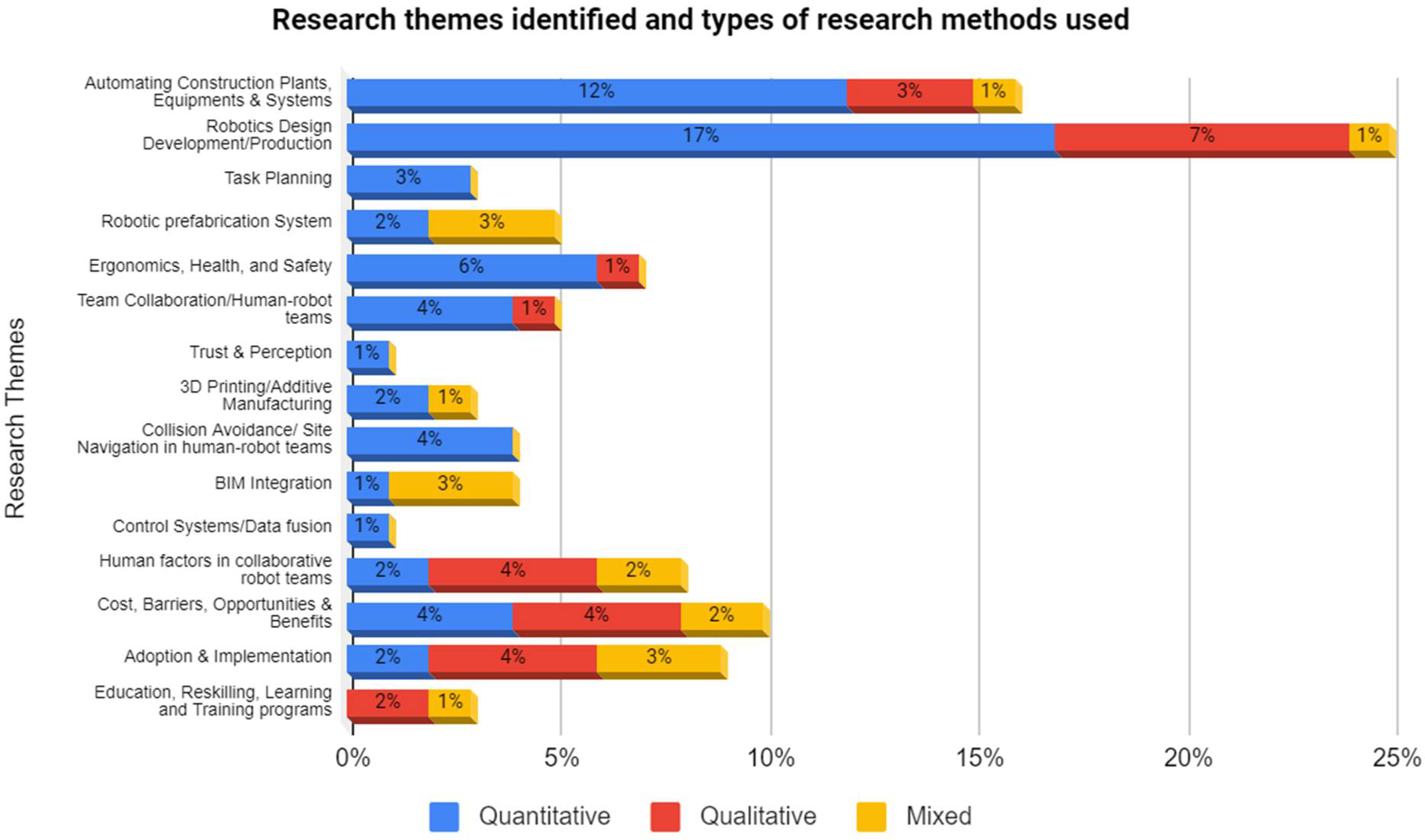
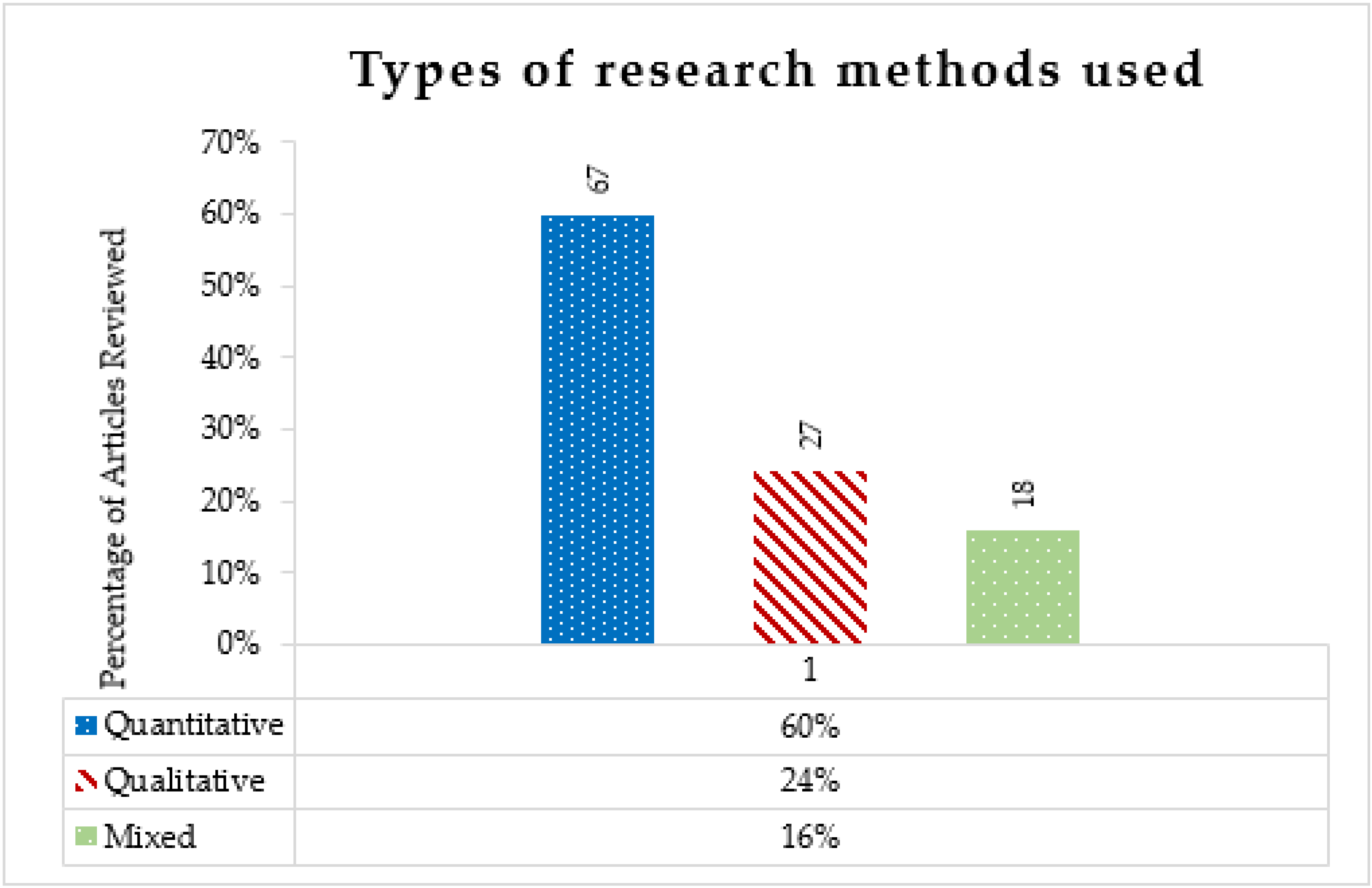
3.5. Types of Research Methods Used
3.6. Use of Theories and Conceptual Frameworks in the Construction Robotics Literature
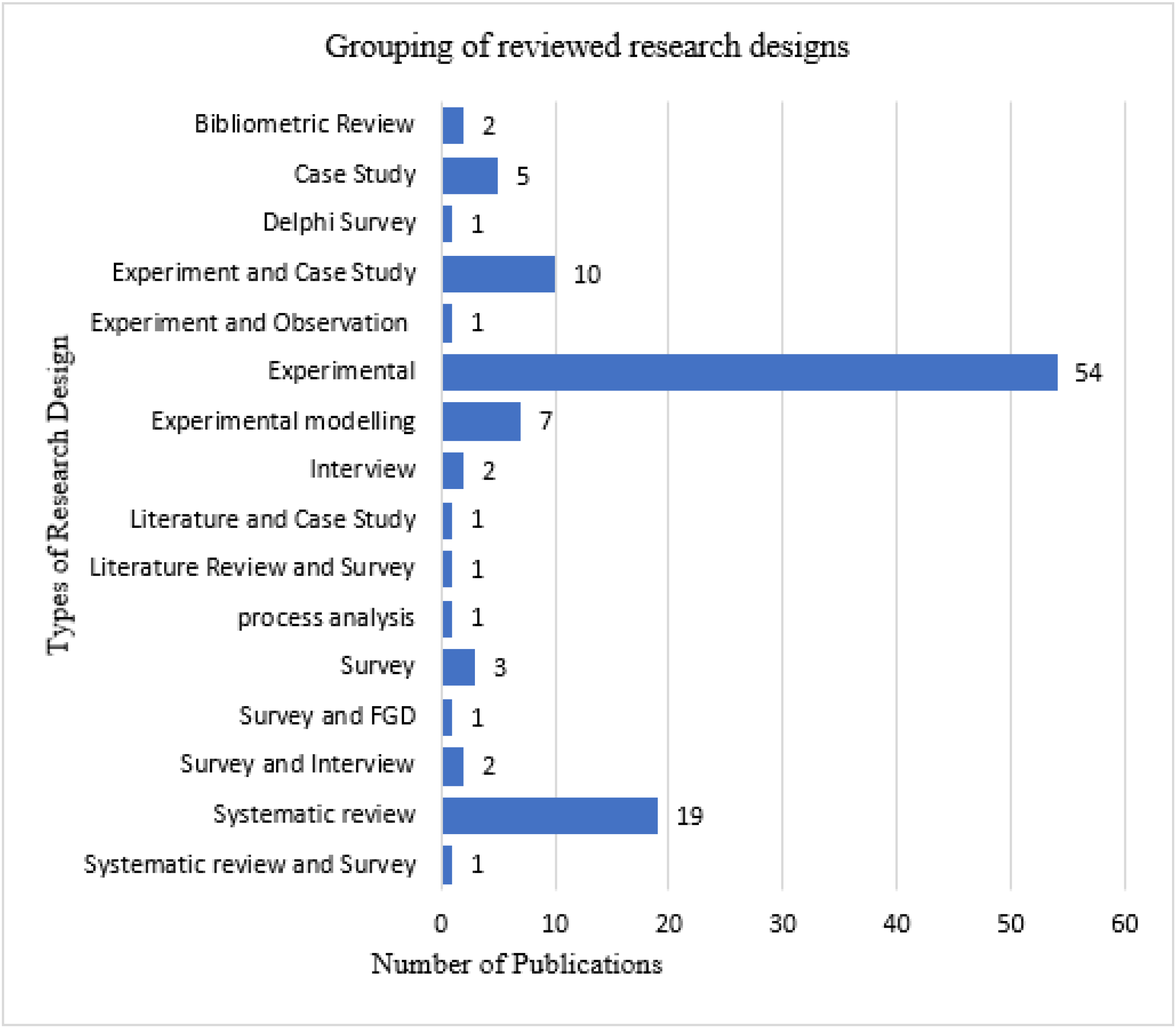
3.7. Research Designs Employed in the Construction Robotics and Human–Robot Teams Literature
3.8. Data Sources Used in Construction Robotics and Human–Robot Teams Literature
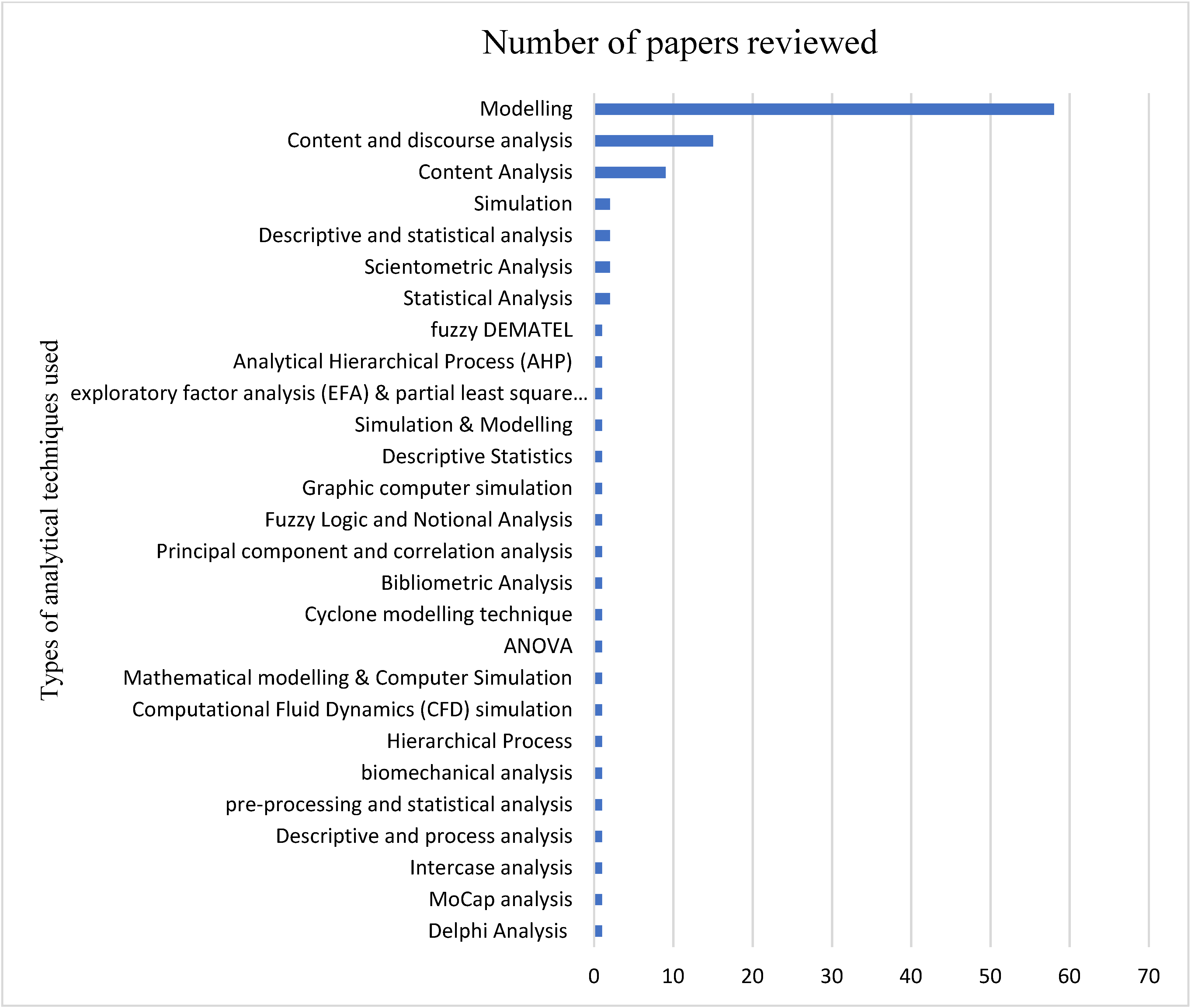
3.9. Analytical Techniques Used in Construction Robotics and Human–Robot Teams Literature
3.10. Analysing the Relationships between Key Components of Methodologies in the Construction Robotics and Human–Robot Teams Literature
3.11. Relationship between Research Methods and Research Designs Employed in the Construction Robotics and Human–Robot Teams Literature
3.12. Relationship between Research Methods and Analytical Techniques Employed in the Construction Robotics and Human–Robot Teams Literature
3.13. Relationship between Data Sources and Analytical Techniques Employed in the Construction Robotics and Human–Robot Teams Literature
3.14. Relationship between Research Methods and Data Sources Employed in the Construction Robotics and Human–Robot Teams Literature
4. Discussion
4.1. Evolution of Construction Robotics Research and Key Thematic Areas
4.2. Types of Research Methods Employed in the Construction Robotics and Human–Robot Teams Literature
4.3. Use of Theories and Conceptual Frameworks in Construction Robotics Literature
4.4. Research Designs, Data Sources and Analytical Techniques Employed in Construction Robotics and Human–Robot Teams Literature
4.5. Nature of the Relationships between Key Components of Research Methods in Construction Robotics and Human–Robot Teams’ Literature
5. Implications
5.1. Implications for Academic Research
5.2. Implications for Construction Robotics and Human–Robot Design and Development
5.3. Implications to Policy Makers and Industry Stakeholders
6. Limitations and Future Research
7. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Appendix A

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| S/N | Thematic Areas | Summary of Overarching Research Questions/Aims/Objectives | Authors |
|---|---|---|---|
| 1 | Automating construction plants, equipment and systems | How do we enable autonomous sensing and modelling of construction objects, tasks and processes? | [41,88,89,90,91] |
| 2 | Robotics design development/production | What design solutions are viable and needed for human–robot collaboration? | [34,35,43,44,92,93,94,95] |
| 3 | Task planning | What design factors and advances are needed for robot actions in complex assembly tasks and task planning? How does the nature of the task affect the positioning and movement of robots? | [31,96,97,98] |
| 4 | Robotic prefabrication system | How can prefabrication disassemble and reassemble construction robotics with little to no human intervention? What are the needed prefabrication design strategies for geometrically complex building elements? | [99,100,101,102,103,104] |
| 5 | Ergonomics, health and safety | What are the design and ergonomics factors to consider in ensuring the safe collaboration of humans with robotics? How to improve construction safety using emerging technologies such as robotics? What are the health and safety impact of construction robotics in collaborative teams with human workers? What are the physiological and psychological effects of wearables, exoskeletons and robotics on human workers? | [45,46,47,72,92] |
| 6 | Team collaboration/human–robot teams | What design, system and process are needed to integrate robotics successfully and efficiently with human collaboration on-site? What are the management strategies for ensuring safe and effective collaborative teams on construction sites? | [51,105,106] |
| 7 | Trust and perception | How can design developments improve trust in safe usage and capability of construction robotics? How do construction workers perceive robots in collaborative teams? Perceptions of future construction robots for buildings. | [42,107,108,109] |
| 8 | 3D printing/additive manufacturing | How do we optimise the use of 3D printing for construction robotics? | [9,33,110] |
| 9 | Performance of operators | What behavioural issues are associated with integrating human workers with robots in construction? | [111] |
| 10 | Collision avoidance/site navigation in human–robot teams | How can robots and workers manoeuvre sites better and without collision? What are design considerations imperative in planning paths in no-walk and walk scenarios? | [48,50,52,112,113] |
| 11 | Review studies | What are the past and current developments in construction robotics and implications for future developments? | [30,36,88,114] |
| 12 | BIM integration | How do we optimise and integrate BIM/digital twins for construction robotics on-site management? How do we incorporate robot task planning and create detailed motions while conducting construction tasks? | [115,116,117] |
| 13 | Control systems/data fusion | How do we optimise control systems and data fusion for more enhanced robotic applications? | [32,118] |
| 14 | Human factors in collaborative robot teams | What are the sources and reasons for human resistance towards construction robotics and collaborative teams? What are the human factors critical to the successful adoption of construction robotics? | [119,120] |
| 15 | Cost, barriers, opportunities and benefits | What are the critical barriers the construction industry faces in adopting robotics? What are the benefits construction robotics contributes to infrastructure delivery? How do we develop highly effective and low-cost robots/robotic applications for the construction industry? What opportunities do construction robotics offer in sustainable construction and resilient infrastructure delivery? | [110,120,121,122,123,124,125,126] |
| 16 | Adoption and implementation | What are the enabling factors and critical drivers for adopting construction robotics? What factors can influence the technological transformation of construction through the adoption of robotics? | [8,127,128,129,130,131] |
| 17 | Education, reskilling, learning and training programs | What tools can be adopted in the construction robotics-related reskilling and training of human workers? What is the role of training and pedagogy in adopting and accepting construction robotics? What are in-depth courses on construction robotics and human–robot teams vital in the AEC curriculum to prepare students for industrialised construction? | [59,132,133] |
| 18 | Virtual Reality, Augmented Reality and Mixed Reality in Robotics | Applications of virtual reality, augmented reality and mixed reality in robotics simulation, testing, experimentation and research | [39,111,115] |
References
- Ehwi, R.J.; Oti-sarpong, K.; Shojaei, R. Offsite Manufacturing Research: A Systematic Review of Methodologies Used. Constr. Manag. Econ. 2022, 40, 1–24. [Google Scholar] [CrossRef]
- Seymour, D.; Rooke, J. The culture of the industry and the culture of research. Constr. Manag. Econ. 1995, 13, 511–523. [Google Scholar] [CrossRef]
- Dainty, A. A Call for Methodological Pluralism in Built Environment Research. In Proceedings of the CIB World Building Congress, Tampere, Finland, 30 May–3 June 2016; pp. 15–16. [Google Scholar]
- Runeson, G. The role of theory in construction management research: Comment. Constr. Manag. Econ. 2010, 15, 37–41. [Google Scholar] [CrossRef]
- Agyekum-mensah, G.; Reid, A.; Temitope, A.T. Methodological Pluralism: Investigation into Construction Engineering and Managnment Reserch Methods. J. Constr. Eng. Manag. 2020, 146, 1–12. [Google Scholar] [CrossRef]
- Yahaya, M.L.; Oyediran, O.S.; John, I.B. Is there any need for Theory in Research? Int. Res. J. Eng. Technol. 2019, 6, 845–854. [Google Scholar]
- Bogue, R. What are the prospects for robots in the construction industry? Ind. Rob. 2018, 45, 1–6. [Google Scholar] [CrossRef]
- Delgado, D.; Manuel, J.; Oyedele, L.; Ajayi, A.; Akanbi, L.; Akinade, O.; Bilal, M.; Owolabi, H. Robotics and automated systems in construction: Understanding industry-specific challenges for adoption. J. Build. Eng. 2019, 26, 100868. [Google Scholar] [CrossRef]
- Abou, A.Y.; Hamzeh, F.; Al Sakka, F. Agent based modeling to optimize workflow of robotic steel and concrete 3D printers. Autom. Constr. 2020, 10, 103040. [Google Scholar] [CrossRef]
- Ma, L.M.; Fong, T.; Micire, M.J.; Kim, Y.K.; Feigh, K. Human-Robot Teaming: Concepts and Components for Design. In Field and Service Robotics, Springer Proceedings in Advanced Robotics; Springer: Berlin/Heidelberg, Germany, 2018; Volume 5, pp. 649–663. [Google Scholar] [CrossRef]
- Simões, A.C.; Soares, A.L.; Barros, A.C. Factors influencing the intention of managers to adopt collaborative robots (cobots) in manufacturing organizations. J. Eng. Technol. Manag. 2020, 57, 101574. [Google Scholar] [CrossRef]
- Adriaensen, A.; Costantino, F.; di Gravio, G.; Patriarca, R. Teaming with industrial cobots: A socio-technical perspective on safety analysis. Hum. Factors Ergon. Manuf. Serv. Ind. 2021, 32, 1–26. [Google Scholar] [CrossRef]
- Creswell, J. Educational Research, 4th ed.; Pearson Education, Inc.: Boston, MA, USA, 2012. [Google Scholar]
- Haddadi, A.; Hosseini, A.; Johansen, A.; Olsson, N. Pursuing Value Creation in Construction by Research—A Study of Applied Research Methodologies . Procedia Comput. Sci. 2017, 21, 1080–1087. [Google Scholar] [CrossRef]
- Zou, P.X.W.; Sunindijo, R.Y.; Dainty, A. Review of construction safety research methods: Integrating theory and practice. Management 2011, 1, 953–962. [Google Scholar]
- Fellows, R.F.; Liu, A.M.M. Research Methods for Construction; John Wiley & Sons: Hoboken, NJ, USA, 2014. [Google Scholar]
- Raza, B.; Ahmad, R.; Nasir, M.H.N.B.M.; Fauzi, S.S.M. Socio-Technical Congruence as an Emerging Concept in Software Development: A Scientometric Analysis and Critical Literature Review. IEEE Access 2021, 9, 129051–129077. [Google Scholar] [CrossRef]
- Pereira, V.; Santos, J.; Leite, F.; Escórcio, P. Using BIM to improve building energy efficiency—A scientometric and systematic review. Energy Build. 2021, 250, 111292. [Google Scholar] [CrossRef]
- Saka, A.B.; Chan, D.W.M. A scientometric review and metasynthesis of building information modelling, BIM, research in Africa. Buildings 2019, 9, 85. [Google Scholar] [CrossRef]
- Golizadeh, H.; Hosseini, M.R.; Martek, I.; Edwards, D.; Gheisari, M.; Banihashemi, S.; Zhang, J. Scientometric analysis of research on “remotely piloted aircraft”: A research agenda for the construction industry. Eng. Constr. Archit. Manag. 2019, 27, 634–657. [Google Scholar] [CrossRef]
- Debrah, C.; Chan, A.P.C.; Darko, A. Artificial intelligence in green building. Autom. Constr. 2022, 137, 104192. [Google Scholar] [CrossRef]
- Shukla, A.K.; Janmaijaya, M.; Abraham, A.; Muhuri, P.K. Engineering applications of artificial intelligence: A bibliometric analysis of 30 years (1988–2018). Eng. Appl. Artif. Intell. 2019, 85, 517–532. [Google Scholar] [CrossRef]
- Li, P.; Lu, Y.; Yan, D.; Xiao, J.; Wu, H. Scientometric mapping of smart building research: Towards a framework of human-cyber-physical system (HCPS). Autom. Constr. 2021, 129, 103776. [Google Scholar] [CrossRef]
- Zabidin, N.S.; Belayutham, S.; Ibrahim, C.K.I.C. A bibliometric and scientometric mapping of Industry 4.0 in construction. J. Inf. Technol. Constr. 2020, 25, 287–307. [Google Scholar] [CrossRef]
- Babalola, A.; Musa, S.; Akinlolu, M.T.; Haupt, T.C. A bibliometric review of advances in building information modeling (BIM) research. J. Eng. Des. Technol. 2020, 25, 287–307. [Google Scholar] [CrossRef]
- Prabhakaran, A.; Mahamadu, A.; Mahdjoubi, L. Understanding the challenges of immersive technology use in the architecture and construction industry: A systematic review. Autom. Constr. 2022, 137, 104228. [Google Scholar] [CrossRef]
- Liu, Z.; Chi, Z.; Osmani, M.; Demian, P. Blockchain and building information management (Bim) for sustainable building development within the context of smart cities. Sustainability 2021, 13, 2090. [Google Scholar] [CrossRef]
- Gohr, F.; Leal, L.; Araújo, F.; Christine, M.; Saldanha, W.; Henrique, G.; Nascimento, P. Improvement factors of constructability and occupational safety on project life cycle phases. Autom. Constr. 2022, 138, 104227. [Google Scholar] [CrossRef]
- Ayinla, K.O.; Cheung, F.; Tawil, A.R. Demystifying the concept of offsite manufacturing method: Towards a robust definition and classification system. Constr. Innov. 2019, 20, 223–246. [Google Scholar] [CrossRef]
- Bock, T. The future of construction automation: Technological disruption and the upcoming ubiquity of robotics. Autom. Constr. 2015, 59, 113–121. [Google Scholar] [CrossRef]
- Seo, J.; Lee, S.; Kim, J.; Kim, S. Task planner design for an automated excavation system. Autom. Constr. 2011, 20, 954–966. [Google Scholar] [CrossRef]
- Koivumäki, J.; Mattila, J. High performance nonlinear motion/force controller design for redundant hydraulic construction crane automation. Autom. Constr. 2015, 51, 7–77. [Google Scholar] [CrossRef]
- Willmann, J.; Knauss, M.; Bonwetsch, T.; Apolinarska, A.; Gramazio, F.; Kohler, M. Robotic timber construction—Expanding additive fabrication to new dimensions. Autom. Constr. 2016, 61, 16–23. [Google Scholar] [CrossRef]
- Chu, B.; Jung, K.; Lim, M.T.; Hong, D. Robot-based construction automation: An application to steel beam assembly (Part I). Autom. Constr. 2013, 32, 46–61. [Google Scholar] [CrossRef]
- Jung, K.; Chu, B.; Hong, D. Robot-based construction automation: An application to steel beam assembly (Part II). Autom. Constr. 2013, 32, 62–79. [Google Scholar] [CrossRef]
- Son, H.; Kim, C.; Kim, H.; Han, S.h.; Kim, M.K. Trend analysis of research and development on automation and robotics technology in the construction industry. KSCE J. Civ. Eng. 2010, 14, 131–139. [Google Scholar] [CrossRef]
- DeWardt, J.P.; Behounek, M.; Chapman, C.; Putra, D. Drilling Systems Automation—Preparing for the Big Jump Forward. In Proceedings of the SPE/IADC Drilling Conference, Amsterdam, The Netherlands, 5–7 March 2013. [Google Scholar]
- Aghimien, D.O.; Aigbavboa, C.O.; Oke, A.E.; Thwala, W.D. Mapping out research focus for robotics and automation research in construction-related studies: A bibliometric approach. J. Eng. Des. Technol. 2019, 18, 1063–1079. [Google Scholar] [CrossRef]
- Onososen, A.O.; Musonda, I. Research Focus for Construction Robotics and Human-Robot Teams towards Resilience in Construction: Scientometric Review. J. Eng. Des. Technol. 2022. [Google Scholar] [CrossRef]
- Yılmaz, Y.; Seyis, S. Mapping the scientific research of the life cycle assessment in the construction industry: A scientometric analysis. Build. Environ. 2021, 204, 108086. [Google Scholar] [CrossRef]
- Lundeen, K.M.; Kamat, V.R.; Menassa, C.C.; Mcgee, W. Scene understanding for adaptive manipulation in robotized construction work. Autom. Constr. 2017, 82, 16–30. [Google Scholar] [CrossRef]
- Liang, C.; Wang, X.; Kamat, V.R.; Menassa, C.C. Human—Robot Collaboration in Construction: Classification and Research Trends. J. Constr. Eng. Manag. 2021, 147, 1–23. [Google Scholar] [CrossRef]
- Melenbrink, N.; Werfel, J.; Menges, A. On-site autonomous construction robots: Towards unsupervised building. Autom. Constr. 2020, 119, 103312. [Google Scholar] [CrossRef]
- Ogunseiju, O.; Olayiwola, J.; Akanmu, A.; Olatunji, O.A. Evaluation of postural-assist exoskeleton for manual material handling. Eng. Constr. Archit. Manag. 2021, 29, 1358–1375. [Google Scholar] [CrossRef]
- Nath, N.D.; Akhavian, R.; Behzadan, A.H. Ergonomic analysis of construction worker’s body postures using wearable mobile sensors. Appl. Ergon. 2017, 62, 107–117. [Google Scholar] [CrossRef]
- Ryu, J.; Mcfarland, T.; Banting, B.; Haas, C.T.; Abdel-rahman, E. Health and productivity impact of semi-automated work systems in construction. Autom. Constr. 2020, 120, 103396. [Google Scholar] [CrossRef]
- Anna, A.; Pacher, M.; Li, H.; Cote, N.; Pastrana, R.; Gramazio, F.; Kohler, M. Robotic assembly of timber joints using reinforcement learning. Autom. Constr. 2021, 125, 103569. [Google Scholar] [CrossRef]
- Myung, H.; Jung, J.; Jeon, H. Robotic SHM and model-based positioning system for monitoring and construction automation. Adv. Struct. Eng. 2012, 15, 943–954. [Google Scholar] [CrossRef]
- Wang, D.; Zheng, L.; Yu, H.; Zhou, W.; Shao, L. Robotic excavator motion control using a nonlinear proportional-integral controller and cross-coupled pre-compensation. Autom. Constr. 2016, 64, 1–6. [Google Scholar] [CrossRef]
- Tsuruta, T.; Miura, K.; Miyaguchi, M. Mobile robot for marking free access floors at construction sites. Autom. Constr. 2019, 107, 102912. [Google Scholar] [CrossRef]
- Zhou, Y.; Guo, H.; Ma, L.; Zhang, Z.; Skitmore, M. Image-based onsite object recognition for automatic crane lifting tasks. Autom. Constr. 2021, 123, 103527. [Google Scholar] [CrossRef]
- Fontelo, P.; Liu, F. A review of recent publication trends from top publishing countries. Syst. Rev. 2018, 7, 147. [Google Scholar] [CrossRef]
- Hallinger, P.; Nguyen, V.T. Mapping the landscape and structure of research on education for sustainable development: A bibliometric review. Sustainability 2020, 12, 1947. [Google Scholar] [CrossRef]
- Li, Z.; Shen, G.Q.; Xue, X. Critical review of the research on the management of prefabricated construction. Habitat Int. 2014, 43, 240–249. [Google Scholar] [CrossRef]
- Gualtieri, L.; Rauch, E.; Vidoni, R. Emerging research fields in safety and ergonomics in industrial collaborative robotics: A systematic literature review. Robot. Comput. Integr. Manuf. 2021, 67, 101998. [Google Scholar] [CrossRef]
- Bresnen, M. Insights on Site: Research into Construction Project Organizations. Doing Res. Organ. 2013, 1, 34–52. [Google Scholar] [CrossRef]
- Sherratt, F.; Leicht, R. Unpacking ontological perspectives in CEM research: Everything is biased. J. Constr. Eng. Manag. 2020, 146, 1–9. [Google Scholar] [CrossRef]
- Halbach, E.; Halme, A. Automation in Construction Job planning and supervisory control for automated earthmoving using 3D graphical tools. Autom. Constr. 2013, 32, 145–160. [Google Scholar] [CrossRef]
- Adami, P.; Rodrigues, P.B.; Woods, P.J.; Becerik-gerber, B.; Soibelman, L.; Copur-gencturk, Y.; Lucas, G. Effectiveness of VR-based training on improving construction workers’ knowledge, skills, and safety behavior in robotic teleoperation. Adv. Eng. Inform. 2021, 50, 101431. [Google Scholar] [CrossRef]
- Chang, S.; Siu, M.F.; Li, H.; Luo, X. Evolution pathways of robotic technologies and applications in construction. Adv. Eng. Inform. 2022, 51, 101529. [Google Scholar] [CrossRef]
- Tjebane, M.M.; Musonda, I.; Okoro, C. Organisational Factors of Artificial Intelligence Adoption in the South African Construction Industry. Front. Built Environ. 2022, 8, 823998. [Google Scholar] [CrossRef]
- Schweber, L. Putting theory to work: The use of theory in construction research. Constr. Manag. Econ. 2015, 33, 840–860. [Google Scholar] [CrossRef]
- Azhar, S.; Ahmad, I.; Sein, M.K. Action research as a proactive research method for construction engineering and management. J. Constr. Eng. Manag. 2010, 136, 87–98. [Google Scholar] [CrossRef]
- Onososen, A.; Musonda, I. Barriers to BIM-Based Life Cycle Sustainability Assessment for Buildings: An Interpretive Structural Modelling Approach. Buildings 2022, 12, 324. [Google Scholar] [CrossRef]
- Sacks, R.; Girolami, M.; Brilakis, I. Building Information Modelling, Artificial Intelligence and Construction Tech. Dev. Built Environ. 2020, 4, 100011. [Google Scholar] [CrossRef]
- Green, S.D.; Kao, C.-C.; Larsen, G.D. Contextualist research: Iterating between methods while following an empirically grounded approach. J. Constr. Eng. Manag. 2010, 136, 117–126. [Google Scholar] [CrossRef]
- Onososen, A.; Musonda, I. Perceived Benefits of Automation and Artificial Intelligence in the AEC Sector: An Interpretive Structural Modeling Approach. Front. Built Environ. 2022, 61, 864814. [Google Scholar] [CrossRef]
- Taylor, S. Locating and conducting discourse analytic research. In Discourse as Data: A Guide for Analysis; SAGE: London, UK, 2001. [Google Scholar]
- Alaka, H.A.; Oyedele, L.O.; Owolabi, H.A.; Ajayi, S.O.; Bilal, M.; Akinade, O.O. Methodological approach of construction business failure prediction studies: A review. Constr. Manag. Econ. 2016, 34, 808–842. [Google Scholar] [CrossRef]
- Edum-Fotwe, F.T.; Thorpe, A.; McCaffer, R.; Price, A.D.F. Developing construction management research: A balance of perspectives. Assoc. Res. Constr. Manag. 1997, 2, 447–454. [Google Scholar]
- Runeson, G.; Skitmore, M. Scientific theories. In Advanced Research Methods in the Built Environment; Blackwell: Oxford, UK, 2008. [Google Scholar]
- Boon, J.; Yap, H.; Pei, K.; Lee, H.; Wang, C. Safety enablers using emerging technologies in construction projects: Empirical study in Malaysia. J. Eng. Des. Technol. 2021. [Google Scholar] [CrossRef]
- Abowitz, D.A.; Toole, T.M. Mixed Method Research: Fundamental Issues of Design, Validity, and Reliability in Construction Research. J. Constr. Eng. Manag. 2010, 136, 108–116. [Google Scholar] [CrossRef]
- Gervasi, R.; Mastrogiacomo, L.; Franceschini, F. A conceptual framework to evaluate human-robot collaboration. Int. J. Adv. Manuf. Technol. 2020, 108, 841–865. [Google Scholar] [CrossRef]
- Kumar, V.R.P.; Balasubramanian, M.; Raj, S.J. Robotics in construction industry. Indian J. Sci. Technol. 2016, 9, 1–12. [Google Scholar] [CrossRef]
- AbdulHafeez, I.; Smallwood, J. Adoption of Construction Ergonomic Interventions on Building Construction Sites in Nigeria. In Advances in Physical Ergonomics and Human Factors, Proceedings of the AHFE 2017 International Conference on Applied Human Factors and Ergonomics, Westin Bonaventure Hotel, Los Angeles, CA, USA, 17–21 July 2017; Goonetilleke, R.S., Karwowski, W., Eds.; Springer: Cham, Switzerland, 2018; p. 124. [Google Scholar]
- Smallwood, J. Mass and Density of Materials: Knowledge and Perceptions. Int. Conf. Appl. Hum. Factors Ergon. 2020, 1215, 394–400. [Google Scholar] [CrossRef]
- Kirner, L.; Lublasser, E.; Brell-cokcan, S. Internet of Construction: Research Methods for Practical Relevance in Construction. Technol. Des. 2021, 5, 146–152. [Google Scholar] [CrossRef]
- Sandberg, M.; Gerth, R.; Lu, W.; Jansson, G.; Mukkavaara, J.; Olofsson, T. Design Automation in Construction—An Overview. In Proceedings of the 33rd CIB World Building Congress W78 Conference, Brisbane, Australia, 31 October–2 November 2016; pp. 1–9. Available online: http://www.diva-portal.org/smash/record.jsf?pid=diva2%3A1045280&dswid=-1302 (accessed on 23 March 2022).
- Krishnamoorthi, S.; Raphael, B. A review of methodologies for performance evaluation of automated construction processes. Built Environ. Proj. Asset Manag. 2021. [Google Scholar] [CrossRef]
- De Soto, B.G.; Skibniewski, M.J. Future of Robotics and Automation in Construction. In Construction 4.0: An Innovation Platform for the Built Environment; CRC Press, LLC: Boca Raton, FL, USA, 2020. [Google Scholar]
- Neuman, L.W. Social Research Methods, 6th ed.; Pearson Education, Inc.: Boston, MA, USA, 2007. [Google Scholar]
- Sam, M.; Franz, B. Evaluating the Perception of Human-Robot Collaboration among Construction Project Managers. In Proceedings of the Constuction Research Congress 2022, Arlington, VA, USA, 9–12 March 2022. [Google Scholar] [CrossRef]
- Clarke, S.; Hoggett, P. Researching Beneath the Surface: Psycho-Social Research Methods in Practice; Routledge: Abingdon, UK, 2019. [Google Scholar]
- Stanczak, G.C. Visual Research Methods, Image, Society and Representation; SAGE Publications Inc.: Thousand Oaks, CA, USA, 2007. [Google Scholar]
- Becker, H. Photography and Sociology, Doing Thin, Evanston; Northwestern University Press: Evanston, IL, USA, 1986. [Google Scholar]
- Suchar, C.S. Grounding Visual Sociology Research in Shooting Scripts. Qual. Sociol. 1997, 20, 33–55. [Google Scholar] [CrossRef]
- Edwards, D.; Holt, G. Construction plant and equipment management research: Thematic review. J. Eng. Des. Technol. 2009, 7, 186–206. [Google Scholar] [CrossRef]
- Jung, M.F.; DiFranzo, D.; Stoll, B.; Shen, S.; Lawrence, A.; Claure, H. Robot Assisted Tower Construction—A Resource Distribution Task to Study Human-Robot Collaboration and Interaction with Groups of People. arXiv 2018, arXiv:1812.09548. [Google Scholar] [CrossRef]
- Lundeen, K.M.; Kamat, V.R.; Menassa, C.C.; McGee, W. Autonomous motion planning and task execution in geometrically adaptive robotized construction work. Autom. Constr. 2019, 100, 24–45. [Google Scholar] [CrossRef]
- Liang, C.J.; Lundeen, K.M.; McGee, W.; Menassa, C.C.; Lee, S.H.; Kamat, V.R. A vision-based marker-less pose estimation system for articulated construction robots. Autom. Constr. 2019, 104, 80–94. [Google Scholar] [CrossRef]
- Gonsalves, N.J.; Ogunseiju, O.; Akanmu, A.A.; Nnaji, C.A. Assessment of a passive wearable robot for reducing low back disorders during rebar work. J. Inf. Technol. Constr. 2021, 26, 936–952. [Google Scholar] [CrossRef]
- Liu, J.; Lee, Y.; Bard, J. Material characterization of workability and process imaging for robotic concrete finishing. Constr. Robot. 2021, 5, 73–85. [Google Scholar] [CrossRef]
- Yabanigül, M.N.; Yazar, T. Production of Gyroid-like modular systems with non-linear robotic hotwire cutting. Autom. Constr. 2021, 126, 103671. [Google Scholar] [CrossRef]
- Nagatani, K.; Abe, M.; Osuka, K.; Chun, P.; Okatani, T.; Nishio, M.; Chikushi, S.; Matsubara, T.; Ikemoto, Y. Innovative technologies for infrastructure construction and maintenance through collaborative robots based on an open design approach. Adv. Robot. 2021, 35, 715–722. [Google Scholar] [CrossRef]
- Leyh, W. Experiences with the construction of a building assembly robot. Autom. Constr. 1995, 4, 45–60. [Google Scholar] [CrossRef]
- Bock, T.; Stricker, D.; Fliedner, J.; Huynh, T. Automatlic generation of the controlling-system for a wall construction robot. Autom. Constr. 1996, 5, 15–21. [Google Scholar] [CrossRef]
- Yoo, W.S.; Lee, H.-J.; Kim, D.-I.; Kang, K.-I.; Cho, H. Genetic algorithm-based steel erection planning model for a construction automation system. Autom. Constr. 2012, 24, 30–39. [Google Scholar] [CrossRef]
- Kasperzyk, C.; Kim, M.K.; Brilakis, I. Automated re-prefabrication system for buildings using robotics. Autom. Constr. 2017, 83, 184–195. [Google Scholar] [CrossRef]
- Kurien, M.; Kim, M.K.; Kopsida, M.; Brilakis, I. Real-time simulation of construction workers using combined human body and hand tracking for robotic construction worker system. Autom. Constr. 2018, 86, 125–137. [Google Scholar] [CrossRef]
- Tavares, P.; Costa, C.M.; Rocha, L.; Malaca, P.; Costa, P.; Moreira, A.P.; Sousa, A.; Veiga, G. Collaborative Welding System using BIM for Robotic Reprogramming and Spatial Augmented Reality. Autom. Constr. 2019, 106, 102825. [Google Scholar] [CrossRef]
- Wagner, H.J.; Alvarez, M.; Kyjanek, O.; Bhiri, Z.; Buck, M.; Menges, A. Flexible and transportable robotic timber construction platform—TIM. Autom. Constr. 2020, 120, 103400. [Google Scholar] [CrossRef]
- Wagner, H.J.; Alvarez, M.; Groenewolt, A.; Menges, A. Towards digital automation flexibility in large-scale timber construction: Integrative robotic prefabrication and co-design of the BUGA Wood Pavilion. Constr. Robot. 2020, 4, 187–204. [Google Scholar] [CrossRef]
- Bodea, S.; Zechmeister, C.; Dambrosio, N.; Dorstelmann, M.; Menges, A. Robotic coreless filament winding for hyperboloid tubular composite components in construction. Autom. Constr. 2021, 126, 103649. [Google Scholar] [CrossRef]
- Ilyas, M.; Khaw, H.Y.; Selvaraj, N.M.; Jin, Y.; Zhao, X. Robot-Assisted Object Detection for Construction Automation: Data and Information-Driven Approach. IEEE/ASME Trans. Mechatron. 2021, 26, 2845–2856. [Google Scholar]
- Liu, Y.; Habibnezhad, M.; Jebelli, H. Brainwave-driven human-robot collaboration in construction. Autom. Constr. 2021, 124, 103556. [Google Scholar] [CrossRef]
- Pan, M.; Pan, W. Stakeholder Perceptions of the Future Application of Construction Robots for Buildings in a Dialectical System Framework. J. Manag. Eng. 2020, 36, 1–13. [Google Scholar] [CrossRef]
- Jin, Z.; Pagilla, P.R.; Maske, H.; Chowdhary, G. Task Learning, Intent Prediction, and Adaptive Blended Shared Control with Application to Excavators. IEEE Trans. Control Syst. Technol. 2021, 29, 18–28. [Google Scholar] [CrossRef]
- Kim, Y.; Kim, H.; Murphy, R.; Lee, S.; Ahn, C.R. Delegation or Collaboration: Understanding Different Construction Stakeholders Perceptions of Robotization. J. Manag. Eng. 2022, 38, 1–12. [Google Scholar] [CrossRef]
- de Soto, B.G.; Agustí-Juan, I.; Hunhevicz, J.; Joss, S.; Graser, K.; Habert, G.; Adey, B.T. Productivity of digital fabrication in construction: Cost and time analysis of a robotically built wall. Autom. Constr. 2018, 92, 297–311. [Google Scholar] [CrossRef]
- Zhu, Q.; Du, J.; Shi, Y.; Wei, P. Neurobehavioral assessment of force feedback simulation in industrial robotic teleoperation. Autom. Constr. 2021, 126, 103674. [Google Scholar] [CrossRef]
- Eiris, R.; Gheisari, M. Research Trends of Virtual Human Applications in Architecture, Engineering and Construction. J. Inf. Technol. Constr. 2017, 22, 168–184. [Google Scholar]
- Kayhani, N.; Taghaddos, H.; Mousaei, A.; Behzadipour, S.; Hermann, U. Heavy mobile crane lift path planning in congested modular industrial plants using a robotics approach. Autom. Constr. 2021, 122, 103508. [Google Scholar] [CrossRef]
- Kim, T.; Lee, D.; Lim, H.; Lee, U.; Cho, H. Exploring research trends and network characteristics in construction automation and robotics based on keyword network analysis. J. Asian Archit. Build. Eng. 2021, 20, 442–457. [Google Scholar] [CrossRef]
- Davtalab, O.; Kazemian, A.; Khoshnevis, B. Automation in Construction Perspectives on a BIM-integrated software platform for robotic construction through Contour Crafting. Autom. Constr. 2018, 89, 13–23. [Google Scholar] [CrossRef]
- Matsas, E.; Batras, D.; Vosniakos, G.C. Beware of the Robot: A Highly Interactive and Immersive Virtual Reality Training Application in Robotic Manufacturing Systems. IFIP Adv. Inf. Commun. Technol. 2013, 397, 606–613. [Google Scholar] [CrossRef]
- Kim, S.; Peavy, M.; Huang, P.; Kim, K. Development of BIM-integrated construction robot task planning and simulation system. Autom. Constr. 2021, 127, 103720. [Google Scholar] [CrossRef]
- Shahandashti, S.M.; Razavi, S.N.; Soibelman, L. Data-fusion approaches and applications for construction engineering. J. Constr. Eng. Manag. 2011, 137, 863–869. [Google Scholar] [CrossRef]
- Navon, R.; Kelly, P.W.; Johnston, D.W. Human Factors in Introducing On-Site Construction Automation. J. Constr. Eng. Manag. 1994, 119, 801–812. [Google Scholar] [CrossRef]
- Brosque, C.; Galballyt, E.; Khatib, O.; Fischer, M. Human-Robot Collaboration in Construction: Opportunities and Challenges. In Proceedings of the 2020 International Congress on Human-Computer Interaction, Optimization and Robotic Applications (HORA), Ankara, Turkey, 26–28 June 2020; IEEE: Piscataway, NJ, USA, 2020; pp. 1–8. [Google Scholar] [CrossRef]
- Everett, J.G.; Slocum, A.H. Construction Versus Manufacturing. J. Constr. Eng. Manag. 1994, 120, 443–452. [Google Scholar] [CrossRef]
- Gregory, R.; Kangari, R. Cost/Benefits of Robotics in Infrastructure and Environmental Renewal. J. Infrastruct. Syst. 2000, 6, 33–40. [Google Scholar] [CrossRef]
- Cai, S.; Ma, Z.; Skibniewski, M.J.; Bao, S.; Wang, H. Construction Automation and Robotics for High-Rise Buildings: Development Priorities and Key Challenges. J. Constr. Eng. Manag. 2020, 146, 04020096. [Google Scholar] [CrossRef]
- Cai, S.; Ma, Z.; Skibniewski, M.; Guo, J.; Yun, L. Application of automation and robotics technology in High-Rise building construction: An overview. In Proceedings of the 35th International Symposium on Automation and Robotics in Construction, Berlin, Germany, 20–25 July 2018; pp. 1–8. [Google Scholar]
- Pradhananga, P.; ElZomor, M.; Kasabdji, G.S. Identifying the Challenges to Adopting Robotics in the US Construction Industry. J. Constr. Eng. Manag. 2021, 147, 05021003. [Google Scholar] [CrossRef]
- Neythalath, N.; Andreas, J. Adaptive robotic manufacturing using higher order knowledge systems. Autom. Constr. 2021, 127, 103702. [Google Scholar] [CrossRef]
- Boles, W.W.; Maxwell, D.A.; Scott, W.D.; Heermann, P.D.; Yarborough, T.; Underwood, J. Construction Automation and Robotics—Pathway to Implementation. J. Constr. Eng. Manag. 1995, 121, 143–152. [Google Scholar] [CrossRef]
- Linner, T.; Pan, W.; Hu, R.; Zhao, C.; Iturralde, K.; Taghavi, M.; Trummer, J.; Schlandt, M.; Bock, T. A technology management system for the development of single-task construction robots. Constr. Innov. 2020, 20, 96–111. [Google Scholar] [CrossRef]
- Pan, M.; Linner, T.; Pan, W.; Cheng, H.M.; Bock, T. Influencing factors of the future utilisation of construction robots for buildings: A Hong Kong perspective. J. Build. Eng. 2020, 30, 101220. [Google Scholar] [CrossRef]
- Bademosi, F.; Issa, R.R.A. Factors Influencing Adoption and Integration of Construction Robotics and Automation Technology in the US. J. Constr. Eng. Manag. 2021, 147, 04021075. [Google Scholar] [CrossRef]
- Law, K.K.; Chang, S.; Siu, M.-F.F. Factors Influencing Adoption of Construction Robotics in Hong Kong’s Industry: A Multistakeholder Perspective. J. Manag. Eng. 2022, 38, 1–14. [Google Scholar] [CrossRef]
- Boles, W.W.; Wang, J. Construction Automation and Robotics in Civil Engineering Education Programs. J. Constr. Eng. Manag. 1996, 122, 12–16. [Google Scholar] [CrossRef]
- Tayeh, R.; Issa, R.R.A. Developing Construction Information Systems Courses Based on Collaboration between Industry and Academia. J. Archit. Eng. 2021, 27, 1–11. [Google Scholar] [CrossRef]


| Theory and Conceptual Frameworks | Frequency | Percentage |
|---|---|---|
| Used a theory/theoretical framework | ||
| Yes | 8 | 7% |
| No | 104 | 93% |
| Total | 112 | 100% |
| Used a conceptual framework/model | ||
| Yes | 24 | 21% |
| No | 88 | 79% |
| Total | 112 | 100% |
| Research Methods | ||||
|---|---|---|---|---|
| Research Design | Quantitative Methods | Qualitative Methods | Mixed Methods | Grand Total |
| Bibliometric review | 2 (3%) | 0 (0%) | 0 (0%) | 2 (2%) |
| Case study | 2 (3%) | 3 (12%) | 0 (0%) | 5 (4%) |
| Delphi survey | 0 (0%) | 1 (4%) | 0 (0%) | 1 (1%) |
| Experiment and case study | 0 (0%) | 0 (0%) | 10 (56%) | 10 (9%) |
| Experiment and observation | 0 (0%) | 0 (0%) | 1 (6%) | 1 (1%) |
| Experimental | 53 (78%) | 0 (0%) | 1 (6%) | 54 (48%) |
| Experimental modelling | 7 (10%) | 0 (0%) | 0 (0%) | 7 (6%) |
| Focus group and survey | 0 (0%) | 0 (0%) | 2 (12%) | 2 (2%) |
| Interview | 0 (0%) | 2 (8%) | 0 (0%) | 2 (2%) |
| Literature and case study | 0 (0%) | 0 (0%) | 1 (6%) | 1 (1%) |
| Literature review and survey | 0 (0%) | 0 (0%) | 1 (6%) | 1 (1%) |
| Process analysis | 1 (1%) | 0 (0%) | 0 (0%) | 1 (1%) |
| Survey | 3 (4%) | 0 (0%) | 0 (0%) | 3 (3%) |
| Survey and interview | 0 (0%) | 0 (0%) | 2 (11%) | 2 (2%) |
| Systematic review | 0 (0%) | 19 (73%) | 0 (0%) | 19 (17%) |
| Systematic review and Survey | 0 (0%) | 1 (4%) | 0 (0%) | 1 (1%) |
| Grand Total | 68 (100%) | 26 (100%) | 18 (100%) | 112 (100%) |
| Research Methods | ||||
|---|---|---|---|---|
| Analytical Techniques | Quantitative Methods | Qualitative Methods | Mixed Methods | Grand Total |
| Analytical hierarchical process (AHP) | 0 (0%) | 0 (0%) | 1 (6%) | 1 (1%) |
| ANOVA | 1 (1%) | 0 (0%) | 0 (0%) | 1 (1%) |
| Bibliometric analysis | 0 (0%) | 1 (4%) | 0 (0%) | 1 (1%) |
| Biomechanical analysis | 1 (1%) | 0 (0%) | 0 (0%) | 1 (1%) |
| Content analysis | 1 (1%) | 7 (26%) | 1 (6%) | 9 (8%) |
| Content and discourse analysis | 0 (0%) | 15 (56%) | 0 (0%) | 15 (13%) |
| Cyclone modelling technique | 0 (0%) | 1 (4%) | 0 (0%) | 1 (1%) |
| Delphi analysis | 0 (0%) | 1 (4%) | 0 (0%) | 1 (1%) |
| Descriptive and process analysis | 0 (0%) | 0 (0%) | 1 (6%) | 1 (1%) |
| Descriptive and statistical analysis | 1 (1%) | 0 (0%) | 1 (6%) | 2 (2%) |
| Descriptive statistics | 0 (0%) | 0 (0%) | 1 (6%) | 1 (1%) |
| Exploratory factor analysis (EFA) and partial least square structural equation modelling (PLS-SEM) | 1 (1%) | 0 (0%) | 0 (0%) | 1 (1%) |
| Fuzzy DEMATEL | 0 (0%) | 0 (0%) | 1 (6%) | 1 (1%) |
| Fuzzy logic and notional analysis | 1 (1%) | 0 (0%) | 0 (0%) | 1 (1%) |
| Graphic computer simulation | 1 (1%) | 0 (0%) | 0 (0%) | 1 (1%) |
| Hierarchical process | 1 (1%) | 0 (0%) | 0 (0%) | 1 (1%) |
| Intercase analysis | 0 (0%) | 1 (4%) | 0 (0%) | 1 (1%) |
| Mathematical modelling and computer simulation | 1 (1%) | 0 (0%) | 0 (0%) | 1 (1%) |
| MoCap analysis | 1 (1%) | 0 (0%) | 0 (0%) | 1 (1%) |
| Modelling | 48 (72%) | 0 (0%) | 10 (56%) | 58 (52%) |
| pre-processing and statistical analysis | 1 (1%) | 0 (0%) | 0 (0%) | 1 (1%) |
| Principal component and correlation analysis | 0 (0%) | 0 (0%) | 1 (6%) | 1 (1%) |
| Scientometric Analysis | 1 (1%) | 0 (0%) | 1 (6%) | 2 (2%) |
| Simulation | 5 (7%) | 0 (0%) | 0 (0%) | 5 (5%) |
| Simulation and Modelling | 1 (1%) | 0 (0%) | 0 (0%) | 1 (1%) |
| Statistical Analysis | 1 (1%) | 1 (4%) | 0 (0%) | 2 (2%) |
| Grand Total | 67 (100%) | 27 (100%) | 18 (100%) | 112 (100%) |
| Data Sources | ||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Analytical Techniques | E | E + O | EI | FD | L | L + B | L + EI | L + EI + FG | O | PI | PI + L | S | SLR | Grand Total |
| Analytical hierarchical process (AHP) | 0 (0%) | 0 (0%) | 1 (33%) | 0 (0%) | 0 (0%) | 0 (0%) | 0 (0%) | 0 (0%) | 0 (0%) | 0 (0%) | 0 (0%) | 0 (0%) | 0 (0%) | 1 (1%) |
| ANOVA | 1 (1%) | 0 (0%) | 0 (0%) | 0 (0%) | 0 (0%) | 0 (0%) | 0 (0%) | 0 (0%) | 0 (0%) | 0 (0%) | 0 (0%) | 0 (0%) | 0 (0%) | 1 (1%) |
| Bibliometric analysis | 0 (0%) | 0 (0%) | 0 (0%) | 0 (0%) | 1 (4%) | 0 (0%) | 0 (0%) | 0 (0%) | 0 (0%) | 0 (0%) | 0 (0%) | 0 (0%) | 0 (0%) | 1 (1%) |
| Biomechanical analysis | 0 (0%) | 0 (0%) | 0 (0%) | 0 (0%) | 1 (4%) | 0 (0%) | 0 (0%) | 0 (0%) | 0 (0%) | 0 (0%) | 0 (0%) | 0 (0%) | 0 (0%) | 1 (1%) |
| Computational fluid dynamics (CFD) simulation | 1 (1%) | 0 (0%) | 0 (0%) | 0 (0%) | 0 (0%) | 0 (0%) | 0 (0%) | 0 (0%) | 0 (0%) | 0 (0%) | 0 (0%) | 0 (0%) | 0 (0%) | 1 (1%) |
| Content analysis | 0 (0%) | 0 (0%) | 2 (67%) | 1 (100%) | 5 (22%) | 0 (0%) | 0 (0%) | 0 (0%) | 0 (0%) | 0 (0%) | 1 (100%) | 0 (0%) | 0 (0%) | 9 (8%) |
| Content and discourse analysis | 0 (0%) | 0 (0%) | 0 (0%) | 0 (0%) | 12 (52%) | 0 (0%) | 1 (33%) | 0 (0%) | 1 (100%) | 1 (100%) | 0 (0%) | 0 (0%) | 0 (0%) | 15 (13%) |
| Cyclone modelling technique | 0 (0%) | 0 (0%) | 0 (0%) | 0 (0%) | 1 (4%) | 0 (0%) | 0 (0%) | 0 (0%) | 0 (0%) | 0 (0%) | 0 (0%) | 0 (0%) | 0 (0%) | 1 (1%) |
| Delphi analysis | 0 (0%) | 0 (0%) | 0 (0%) | 0 (0%) | 0 (0%) | 0 (0%) | 1 (33%) | 0 (0%) | 0 (0%) | 0 (0%) | 0 (0%) | 0 (0%) | 0 (0%) | 1 (1%) |
| Descriptive and process analysis | 0 (0%) | 1 (100%) | 0 (0%) | 0 (0%) | 0 (0%) | 0 (0%) | 0 (0%) | 0 (0%) | 0 (0%) | 0 (0%) | 0 (0%) | 0 (0%) | 0 (0%) | 1 (1%) |
| Descriptive and statistical analysis | 0 (0%) | 0 (0%) | 0 (0%) | 0 (0%) | 0 (0%) | 0 (0%) | 0 (0%) | 0 (0%) | 0 (0%) | 0 (0%) | 0 (0%) | 2 (50%) | 0 (0%) | 2 (2%) |
| Descriptive statistics | 0 (0%) | 0 (0%) | 0 (0%) | 0 (0%) | 0 (0%) | 1 (100%) | 0 (0%) | 0 (0%) | 0 (0%) | 0 (0%) | 0 (0%) | 0 (0%) | 0 (0%) | 1 (1%) |
| EFA and PLS-SEM | 0 (0%) | 0 (0%) | 0 (0%) | 0 (0%) | 0 (0%) | 0 (0%) | 0 (0%) | 0 (0%) | 0 (0%) | 0 (0%) | 0 (0%) | 1 (25%) | 0 (0%) | 1 (1%) |
| Fuzzy DEMATEL | 0 (0%) | 0 (0%) | 0 (0%) | 0 (0%) | 0 (0%) | 0 (0%) | 0 (0%) | 1 (100%) | 0 (0%) | 0 (0%) | 0 (0%) | 0 (0%) | 0 (0%) | 1 (1%) |
| Fuzzy logic and notional analysis | 0 (0%) | 0 (0%) | 0 (0%) | 0 (0%) | 1 (4%) | 0 (0%) | 0 (0%) | 0 (0%) | 0 (0%) | 0 (0%) | 0 (0%) | 0 (0%) | 0 (0%) | 1 (1%) |
| Graphic computer simulation | 1 (1%) | 0 (0%) | 0 (0%) | 0 (0%) | 0 (0%) | 0 (0%) | 0 (0%) | 0 (0%) | 0 (0%) | 0 (0%) | 0 (0%) | 0 (0%) | 0 (0%) | 1 (1%) |
| Hierarchical process | 1 (1%) | 0 (0%) | 0 (0%) | 0 (0%) | 0 (0%) | 0 (0%) | 0 (0%) | 0 (0%) | 0 (0%) | 0 (0%) | 0 (0%) | 0 (0%) | 0 (0%) | 1 (1%) |
| Intercase analysis | 0 (0%) | 0 (0%) | 0 (0%) | 0 (0%) | 0 (0%) | 0 (0%) | 1 (33%) | 0 (0%) | 0 (0%) | 0 (0%) | 0 (0%) | 0 (0%) | 0 (0%) | 1 (1%) |
| Mathematical modelling and computer simulation | 1 (1%) | 0 (0%) | 0 (0%) | 0 (0%) | 0 (0%) | 0 (0%) | 0 (0%) | 0 (0%) | 0 (0%) | 0 (0%) | 0 (0%) | 0 (0%) | 0 (0%) | 1 (1%) |
| MoCap analysis | 1 (1%) | 0 (0%) | 0 (0%) | 0 (0%) | 0 (0%) | 0 (0%) | 0 (0%) | 0 (0%) | 0 (0%) | 0 (0%) | 0 (0%) | 0 (0%) | 0 (0%) | 1 (1%) |
| Modelling | 58 (82%) | 0 (0%) | 0 (0%) | 0 (0%) | 0 (0%) | 0 (0%) | 0 (0%) | 0 (0%) | 0 (0%) | 0 (0%) | 0 (0%) | 0 (0%) | 0 (0%) | 58 (52%) |
| Pre-processing and statistical analysis | 1 (1%) | 0 (0%) | 0 (0%) | 0 (0%) | 0 (0%) | 0 (0%) | 0 (0%) | 0 (0%) | 0 (0%) | 0 (0%) | 0 (0%) | 0 (0%) | 0 (0%) | 1 (1%) |
| Principal component and correlation analysis | 0 (0%) | 0 (0%) | 0 (0%) | 0 (0%) | 0 (0%) | 0 (0%) | 0 (0%) | 0 (0%) | 0 (0%) | 0 (0%) | 0 (0%) | 1 (25%) | 0 (0%) | 1 (1%) |
| Scientometric analysis | 0 (0%) | 0 (0%) | 0 (0%) | 0 (0%) | 1 (4%) | 0 (0%) | 0 (0%) | 0 (0%) | 0 (0%) | 0 (0%) | 0 (0%) | 0 (0%) | 1 (100%) | 2 (2%) |
| Simulation | 4 (6%) | 0 (0%) | 0 (0%) | 0 (0%) | 0 (0%) | 0 (0%) | 0 (0%) | 0 (0%) | 0 (0%) | 0 (0%) | 0 (0%) | 0 (0%) | 0 (0%) | 4 (4%) |
| Simulation and modelling | 1 (1%) | 0 (0%) | 0 (0%) | 0 (0%) | 0 (0%) | 0 (0%) | 0 (0%) | 0 (0%) | 0 (0%) | 0 (0%) | 0 (0%) | 0 (0%) | 0 (0%) | 1 (1%) |
| statistical analysis | 1 (1%) | 0 (0%) | 0 (0%) | 0 (0%) | 1 (4%) | 0 (0%) | 0 (0%) | 0 (0%) | 0 (0%) | 0 (0%) | 0 (0%) | 0 (0%) | 0 (0%) | 2 (2%) |
| Grand Total | 71 (100%) | 1 (100%) | 3 (100%) | 1 (100%) | 23 (100%) | 1 (100%) | 3 (100%) | 1 (100%) | 1 (100%) | 1 (100%) | 1 (100%) | 4 (100%) | 1 (100%) | 112 (100%) |
| Data Sources | ||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Research Methods | E | E + O | EI | FD | L | L + B | L + EI | L + EI + FG | O | PI | PI + L | S | SLR | Grand Total |
| Mixed | 10 (14%) | 1 (100%) | 1 (33%) | 0 (0%) | 0 (0%) | 1 (100%) | 0 (0%) | 1 (100%) | 0 (0%) | 0 (0%) | 1 (100%) | 2 (50%) | 1 (100%) | 18 (16%) |
| Qualitative | 0 (0%) | 0 (0%) | 2 (67%) | 0 (0%) | 20 (87%) | 0 (0%) | 3 (100%) | 0 (0%) | 1 (100%) | 1 (100%) | 0 (0%) | 0 (0%) | 0 (0%) | 27 (24%) |
| Quantitative | 61 (86%) | 0 (0%) | 0 (0%) | 1 (100%) | 3 (13%) | 0 (0%) | 0 (0%) | 0 (0%) | 0 (0%) | 0 (0%) | 0 (0%) | 2 (50%) | 0 (0%) | 67 (60%) |
| Grand Total | 71 (100%) | 1 (100%) | 3 (100%) | 1 (100%) | 23 (100%) | 1 (100%) | 3 (100%) | 1 (100%) | 1 (100%) | 1 (100%) | 1 (100%) | 4 (100%) | 1 (100%) | 112 (100%) |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Onososen, A.O.; Musonda, I.; Ramabodu, M. Construction Robotics and Human–Robot Teams Research Methods. Buildings 2022, 12, 1192. https://doi.org/10.3390/buildings12081192
Onososen AO, Musonda I, Ramabodu M. Construction Robotics and Human–Robot Teams Research Methods. Buildings. 2022; 12(8):1192. https://doi.org/10.3390/buildings12081192
Chicago/Turabian StyleOnososen, Adetayo Olugbenga, Innocent Musonda, and Molusiwa Ramabodu. 2022. "Construction Robotics and Human–Robot Teams Research Methods" Buildings 12, no. 8: 1192. https://doi.org/10.3390/buildings12081192
APA StyleOnososen, A. O., Musonda, I., & Ramabodu, M. (2022). Construction Robotics and Human–Robot Teams Research Methods. Buildings, 12(8), 1192. https://doi.org/10.3390/buildings12081192