1. Introduction
The problem of determining the roadway vibration that results from moving vehicles has been a long-standing topic of interest. Roadways always have a layered structure, and the physical and mechanical properties of each structural material are different. In order to accurately and efficiently simulate the response of the road, this problem was idealized as the dynamic analysis of a layered half-space subjected to a moving load [
1]. Over the past 30 years, many rigorous models or numerical models have been developed on this topic, which may be classified into two groups: the analytical method and the numerical method.
The analytical methods, or semi-analytical methods, are generally based on integral transformation, which offers a more effective way of understanding the essence of those kinds of problems. Based on the assumption that the layered half-space is uniform along the horizontal direction, the semi-unbounded domain is transformed into a wavenumber-frequency domain by using Fourier transformation or Hankel transformation. Thus, the partial differential wave equations become the ordinary differential equation, the solution to which can be obtained analytically. Pioneering work has been carried out by Thomson [
2] and Haskell [
3], who proposed the transfer matrix method. However, it is computationally unstable for high-frequency cases because it has a positive exponential element in the transfer matrix. Many attempts have been made to remedy this problem, such as the stiffness matrix method (SMM) proposed by Kausel et al. [
4,
5]. To better handle the problem of a moving load, Gunaratne and Sanders [
6] developed a layer stiffness approach to study the response of a layered elastic medium to a moving uniform distribution of normal and shear stresses. Lefeuve-Mesgouez et al. [
7,
8] subsequently considered a harmonic moving rectangular load for sub-Rayleigh and super-Rayleigh cases via a method that was based on SMM. Grundmann et al. [
9] researched the response of a 3D layered half-space and a half-space with variable stiffness in the vertical direction when subjecting this to a simplified train model. Recently, Kausel [
10] also drew upon SMM to consider the case of a moving load on the surface of a 3D-layered medium.
The transmission and reflection matrix method, which was developed by Barrors and Luco [
11,
12], is also an integral transformation method. It can be used to obtain the steady-state dynamic response of a multilayered, viscoelastic half-space for both a buried and a surface-point load, moving at subsonic, transonic, and supersonic speeds. This is similar to a method developed by Luco [
13] and Apsel [
14] for analyzing the responses to a buried fixed-point load. Besides, a dynamic flexibility matrix approach was also developed in the transformed domain by Sheng et al. [
15,
16], which is used to calculate the surface displacement of a viscoelastic-layered half-space resulting from a harmonic or a constant load moving along a railway track. By using some mathematical treatments, the terms of this method involved no exponents and the difficulties encountered with very thick layers were avoided. Based on this model, Sheng et al. [
16] and Jones et al. [
17] studied the effect of a relative speed between load and wave propagation on the dynamic response in layered ground structures. However, when calculating the internal displacement and stress in the elastic-layered medium, similar difficulties were encountered when using transfer matrix methods. Chen et al. [
18] proposed an analytical approach for obtaining the accurate surface mechanical responses of an isotropic-layered system subjected to a circular uniform vertical load, for which the integral convergence of the surface response was improved.
In contrast to the isotropic case, many works have been published on the 3D anisotropic uniformity, or layered half-space, under moving load. Beskou et al. [
19] considered the dynamic response of an elastic thin plate resting on a cross-anisotropic, elastic half-space to a moving rectangular load via analytical methods. A direct stiffness method was employed by Ba et al. [
20] for investigating the dynamic response of a multilayered, transversely isotropic half-space generated by a moving point load. Based on the Stroh formalism and Fourier transform, Wang et al. [
21] studied the problem of a moving point load over an anisotropic-layered, poroelastic half-space. Ai et al. [
22] investigated the response of a transversely isotropic, multilayered poroelastic medium subjected to a vertical rectangular-moving load, for which an extended precise integration method [
23] was utilized. The precise integration method was also applied by Han et al. [
24] for the evaluation of the dynamic impedance of a rigid foundation embedded in an anisotropic multilayered soil within a cylindrical polar coordinates system. An analytical layer element method was developed by Ai et al. [
25] to obtain the solutions of transversely isotropic, multilayered media subjected to a vertical or horizontal rectangular dynamic load. However, the analytical methods for solving the multilayered anisotropic medium usually involve tedious and lengthy analytical solutions, and for the medium with more elastic constants, the formulation could become extremely cumbersome.
There are also some excellent works which used the discrete method to solve the wave equation in the transform domain, such as the thin layer method (TLM). The TLM was originally conceived by Lysmer and Waas [
26,
27] and was further developed by Kausel [
28,
29]. This method combined an FE discretization in the direction of the layering with an analytical solution in an infinite horizontal direction, with all the physical layers being divided into thin sub-layers. To apply this method, the underlying half-space is often replaced with an appropriately thick buffer layer on rigid bedrock. To enhance the performance of the TLM, Jin et al. [
30] used ‘absorbing boundary conditions’ to investigate the dynamic response of layered media to a moving line load. However, the accuracy and stability of using the TLM for discrete calculations in the vertical direction can be affected by the selected thickness of the sub-layer.
Commonly, the integral transformation method should be applied to specific geometry and boundary conditions. In practice, various layer combinations and boundary conditions are encountered, which may exceed the solution range of the integral transformation method. Numerical methods are powerful tools for the dynamic analysis of complex geometries and boundary conditions, such as the finite element method (FEM) and the boundary element method (BEM). Generally, the FEM is not suitable to solve the dynamic problem concerning the infinite domain because outgoing waves are reflected at the artificial boundaries of the FE mesh. Some transmitting boundary conditions are employed to account for the effect of the radiation damping of the outer infinite domain [
31,
32]. Instead of setting artificial transmitting boundary conditions in the FEM, some hybrid methods have combined the FEM with other discrete methods. The 2.5D finite/infinite element procedure was adopted by Yang et al. [
33] to solve the 3D moving loads problem in a 2D half-space. The near-field that contains loads and irregular structures was simulated by finite elements, and the far-field that covers the external infinite soil was simulated by the infinite elements. Yang et al. [
34] conducted a parametric study of the effect of the shear wave velocity, damping ratio, layer thickness, moving speed, and vibration frequency of trains on layered soils. It should be noted that a problem encountered in FEM-based approaches, however, is that, as the load frequency increases, the finite element mesh needs to be refined, which may require expensive calculation.
Another popular numerical method is the BEM, which is suitable for solving the wave propagation problem related to the infinite domain. Rasmussen [
35,
36] derived the formulation of Green’s function for a moving load in the time domain based on a moving coordinate system. Andersen et al. [
37] applied the BEM to an analysis of the steady-state response of an elastic medium to a moving source with a moving local frame of reference. However, the elements had to be very small because the wavelengths in the moving reference frame became small when the load speed approached S-wave velocity. Papageorgiou and Pei [
38] studied the 2.5D elastodynamic scattering problem by using a discrete wavenumber BEM. The radiation condition of an infinite medium can also be satisfied automatically by the BEM. However, for three-dimensional multilayered media, a full space fundamental solution, or Green’s function, and a discretization of the interfaces between the layers, is required. Doing this involves a great deal of work.
Considering the limitations of analytical and numerical methods, a semi-analytical method called the spectral element method (SEM) was developed to solve the dynamic analysis of a layered half-space. The SEM can be considered as a combination of the key features of the conventional FEM and SMM. In the SEM, the exact dynamic stiffness matrix is used as the element stiffness matrices for the finite elements in a structure [
39], and the system response is obtained by summing a finite number of wave modes for different discrete frequencies [
40]. The problem size and degree of freedoms (DOFs) are always small because the dynamic stiffness is accurate, so only one element can model the whole soil layer. Another major advantage of the SEM is low computation cost, which is due to the smallness of the system stiffness matrix, as well as due to the discretized series summations obtainable by using fast Fourier transformation (FFT). Thus, the SEM is a promising technique that has been widely used in engineering [
41,
42,
43].
Despite the past studies performed on this issue, this field still experiences some major shortcomings: (1) in the SEM, the dynamic stiffness matrix is based on the solution of a set of transcendental equations, which may be unstable for high-frequency or thin layer cases. (2) The versatility of the accurate stiffness matrix is poor, which needs to be re-derived for different media, and, for anisotropic 3D problems, the stiffness matrix will be extremely cumbersome. (3) By using 3D dynamic analysis, the parameter-based research into the effects of layer thickness, material modulus, and load speed on the distribution of displacement, stress, velocity, and acceleration in multilayered road structures remains rather limited. This study is devoted to developing an SEM which is based on a precise integration algorithm (PIA) [
44] to fill the research gap. In the proposed SEM, the discrete solution format of the stiffness matrix is presented to avoid cumbersome analytical formulas, thereby increasing the versatility of the method. It can be used to solve the wave propagation problems for isotropic and anisotropic material without adding extra work. In addition, by using the PIA, very accurate numerical solutions can be obtained. By using the proposed method, a comprehensive study of the different parameters is conducted to reveal the effects on the dynamic response of the layered system.
This paper is organized as follows. In
Section 2, an SEM based on the PIA to solve the moving load problem within a multilayered system is provided. Two distinct load models are then adopted to derive the solutions for the time-spatial domain. In
Section 3, the proposed method is assessed and validated. Drawing upon equivalent conversion rules, the impact of using a simplified tire contact model when modeling ground vibration is studied. The effects of the thickness and material anisotropy of the layers on a layered road structure, when subjected to a moving bell load, are investigated. Our conclusions are summarized in
Section 4.
2. Model Formulation
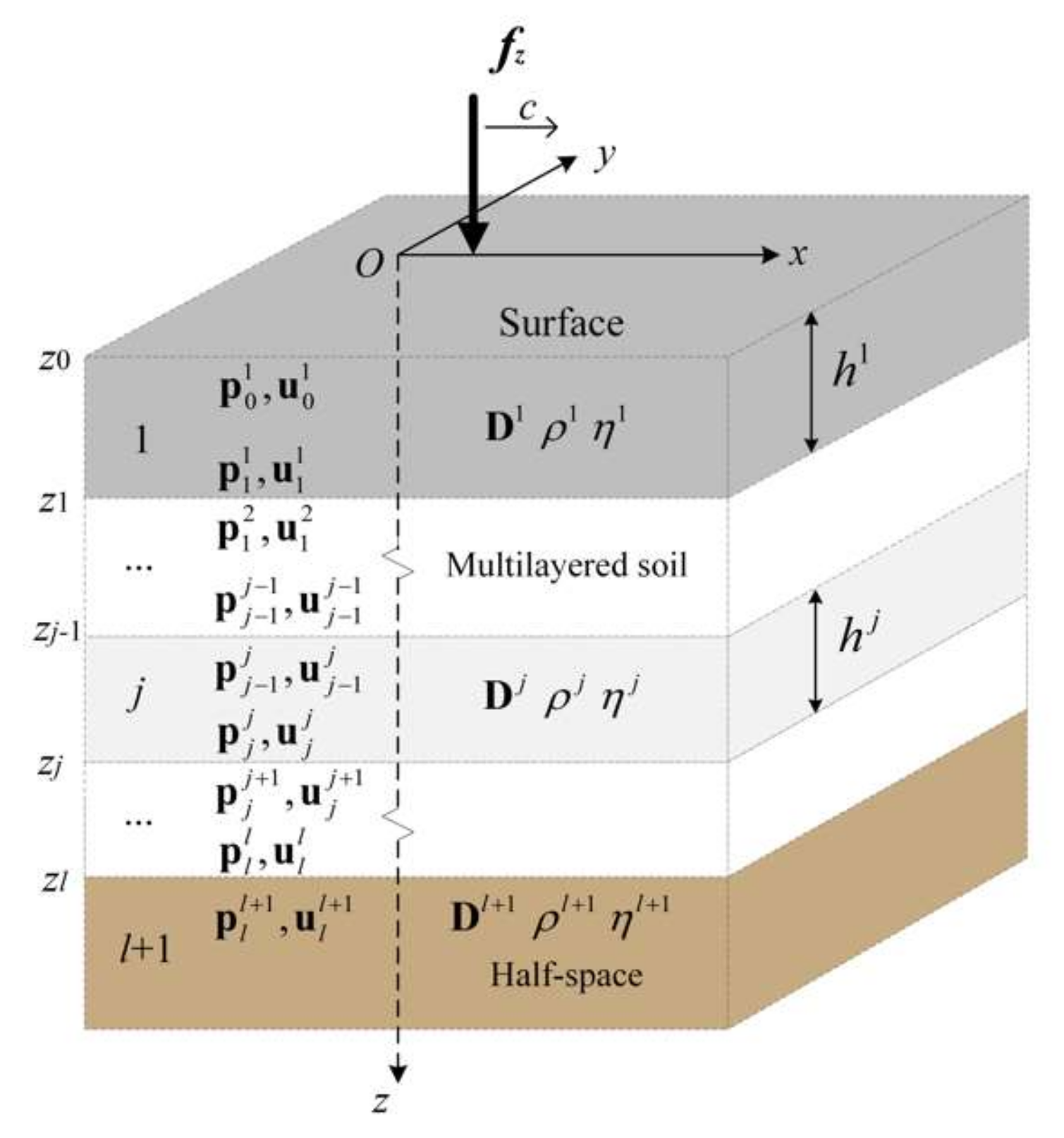
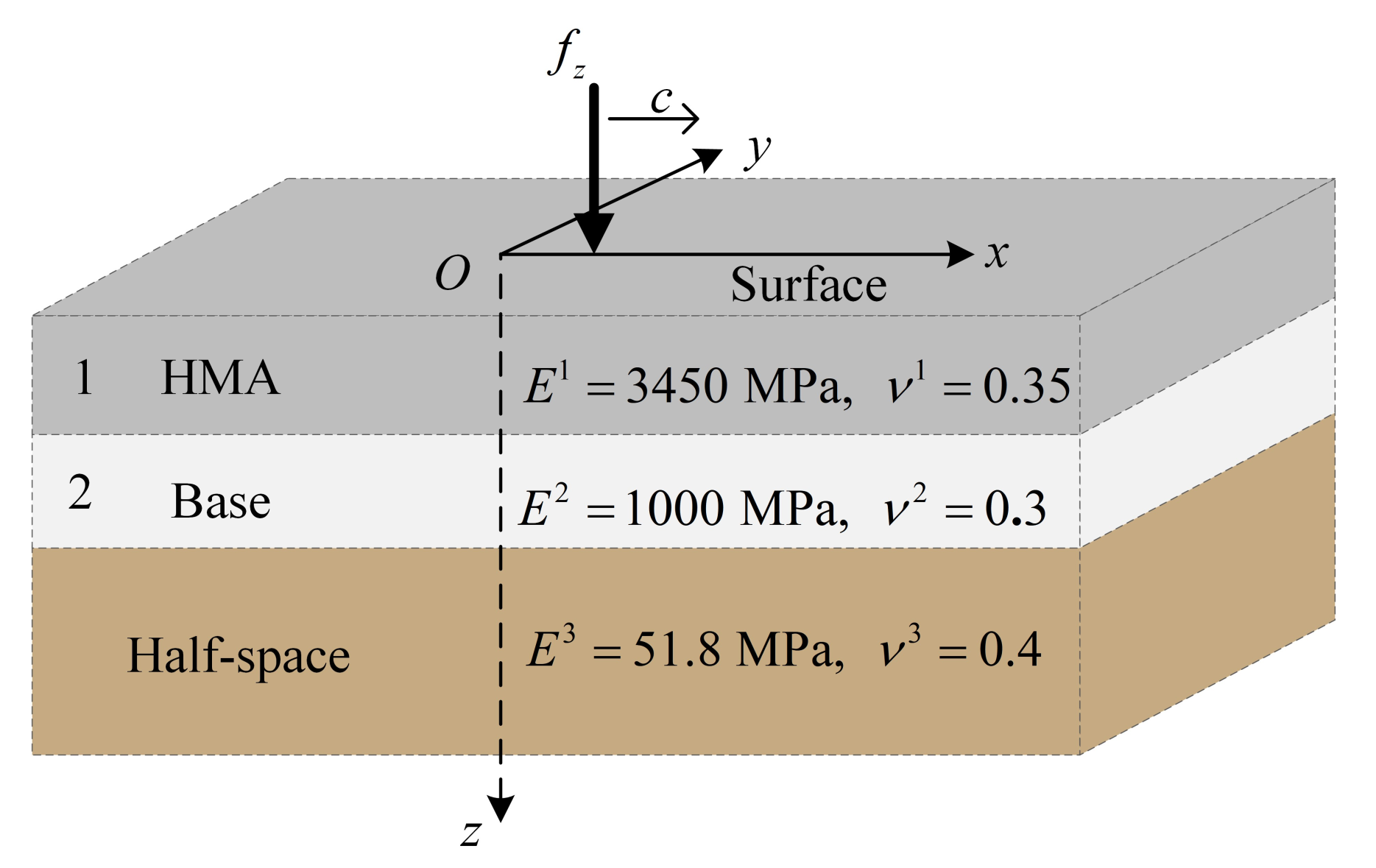
Consider a semi-infinite elastic road structure made up of
l+1 horizontal, homogeneous, anisotropic viscoelastic layers which overlies a homogeneous, anisotropic viscoelastic half-space (
Figure 1). For the
jth layer, the material constants are: the elasticity matrix
; the mass density,
; the hysteretic damping ratio,
; and the layer thickness,
. It is assumed that the
z-axis is pointing downward through the medium, with the origin of the axes placed at the surface.
2.1. Governing Equation within the Frequency-Wavenumber Domain for a General Anisotropic Multilayered Medium
According to Hook’s law, the stress–strain relationship in Cartesian coordinates for a general anisotropic material is expressed as follows:
or briefly
where
is the elasticity matrix,
is the stress vector, and the strain vector is
;
stands for the displacement vector, i.e.,
. The partial differential operator
is expressed as:
The Lame wave motion equation for a 3D medium, with vanishing body forces, can be formulated as:
where the superscript dots in
denote the second-order partial derivative, with respect to time,
t.
is the mass density.
For the solution of the problem, a Fourier transform, and its inverse, are performed to convert the variables between the time-space domain and the frequency domain. It can be defined as follows:
where
is the angular frequency;
is an arbitrary variable in the time-space domain; and
represents the variable
in the transformed domain. For a given layer,
j, by substituting Equations (1)–(3) into Equation (4) and applying the Fourier transform, one can obtain a transformed wave equation for a homogeneous anisotropic medium in terms of displacements from Equation (4).
where
is a
unit matrix. The corresponding elasticity matrix
is derived as
The solution of
for Equation (7) is in exponential forms. Based on the assumption that the layered half-space is uniform in the horizontal direction, different waves should have the same phase at the surface
. Therefore, the solution of
for Equation (7) can be expressed as
where
and
are the wave numbers along the
x-axis and
y-axis, respectively. Substituting Equation (9) into Equation (7), one can obtain a transformed wave equation, with the vertical coordinate
z serving as a variable, i.e.,
Equation (10) is an ordinary differential equation, where
is the partial derivative of
with respect to
z in the
jth layer, and the coefficient matrices for the anisotropic medium in the
jth layer take the following form:
where the effect of damping needs to be considered, the elastic constants in Equation (11) need to be multiplied by
, (
is the hysteretic damping ratio of the
jth layer). In order to solve Equation (10), the dual stress vector
for the
jth layer is introduced, and by applying the relationships between the stresses and the displacement in the transformed domain, the stress vector can be expressed as follows:
By introducing the state vector
into Equation (10), it can be rewritten as a first-order ordinary differential equation in the frequency-wavenumber domain:
where
is a Hamiltonian matrix, which is expressed as follows:
2.2. Solution of the Transformed Wave Equation
Equation (13) is the governing equation of the wave propagation. The solution can be obtained when the boundary conditions are determined. However, for different materials, such as isotropic, anisotropic, etc., the solutions are different, and the exact solution is very complicated. It should be noted that these solutions exhibit instabilities, such as the case of sharp variations in the stiffness of the layered half-space. In this study, a numerical procedure is used to obtain the solution of Equation (13), which can be used for any medium material and is stable for any layered system.
The general solution of Equation (13) is an exponential function:
where
represents the integration constants. It can be noted that the upper and lower bounds and thickness of the
jth layer are
,
, and
, respectively. According to Equation (15), the state vectors at the upper and lower bounds of the
jth layer will satisfy the following:
where
is also an exponential function, which is referred to as the state transition matrix.
For calculating the state transition matrix, a precise integration algorithm is applied. The
jth layer is divided into
min-layers of equal thickness,
, where
N is the number of actual integral calculations. Take
N = 20 as an example; the integration step is very small,
, which can guarantee calculation accuracy, and the number of integral calculations is a small value:
N = 20, which represents the calculation efficiency of the PIA. The exponent
can be calculated as follows:
When performing a Taylor series expansion of the exponent (as
is extremely small), this will deviate from the unitary matrix by a small remainder,
, as shown below:
By successively factorizing the exponent, a recursive formula can eventually be obtained for its evaluation:
where
By applying Equation (21) N times using calculated from Equation (18), can be determined with a high degree of accuracy. For example, with N = 20, when the Taylor expansion takes the first four terms, the relative error of the omitted value is approximately . It should be noted that is smaller than the number of decimal digits for double float-point numbers, which is . Therefore, it can be considered that the accuracy of will reach the highest accuracy for the computer storage.
2.3. Spectral Element Formulation
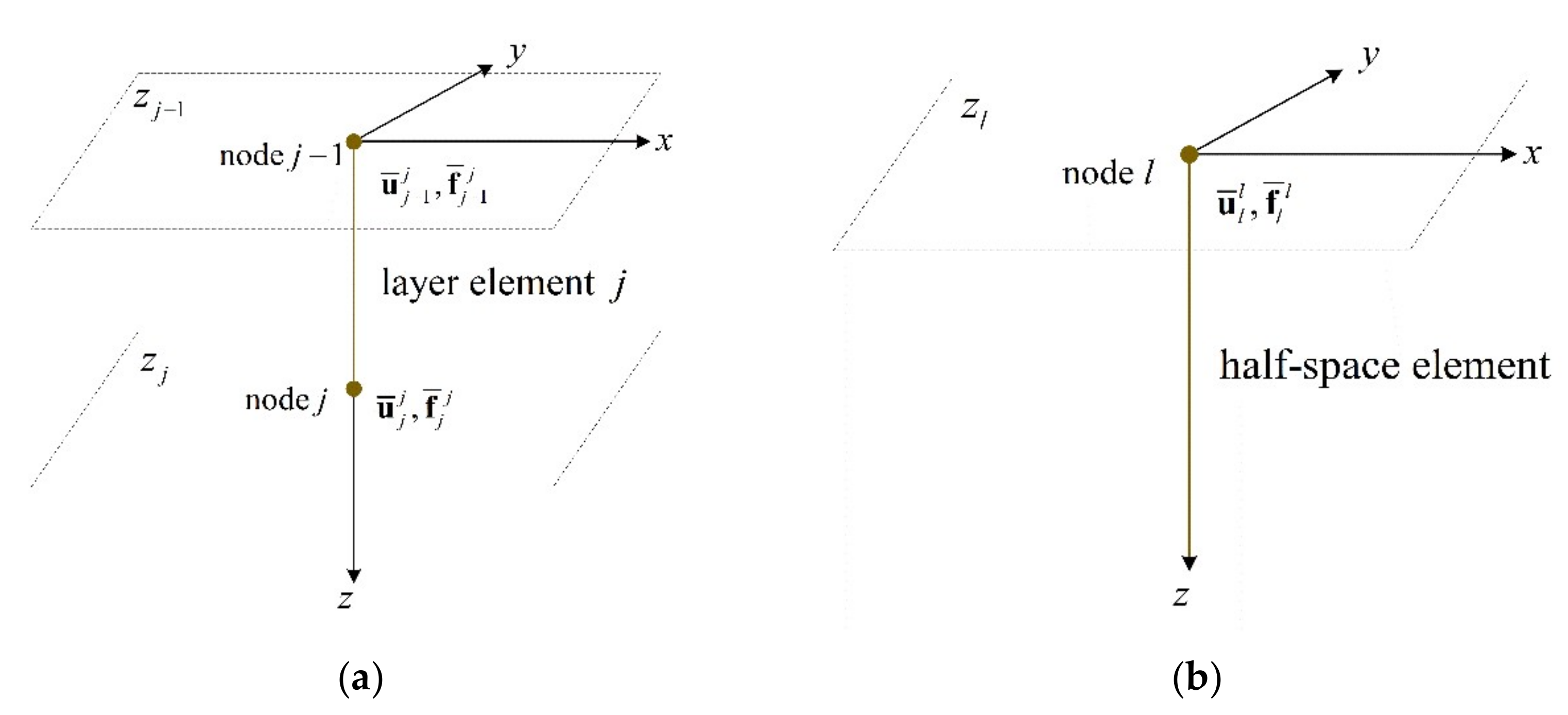
The spectral element method is applied to model the layered system. Based on the state transition matrix, a two-node layer element is developed, and based on the radiation conditions at infinity, a one-node layer element is obtained. In this sub-section, the dynamic stiffness matrix of the two-node layer element and one-node layer element are derived, respectively.
Based on the Cauchy stress principle, for the
jth layer element, as shown in
Figure 2a, the surface traction of the upper bound is denoted as
, and the surface traction of the lower bound is expressed as
. The surface traction vector can be expressed as
in which
is the force vector for the
jth layer element, and
is the node force vector. Referring to
Figure 1, the continuity conditions relating to the displacements and stresses at the interface between adjacent layer elements can be written as
where the superscripts for the displacements and stresses denote the layer number, while the subscripts denote the interface number.
For a natural layer, by using the PIA, the state transition matrix is obtained, which can be indicated in a partitioned matrix as follows:
Substituting Equation (22) into Equation (24), the relationship of the nodal traction vector and displacement is obtained as follows:
where
,
,
,
can be considered as the element dynamic stiffness, and they can be expressed as follows:
The compact form of Equation (25) can be expressed as
For a layered system overlying a homogenous elastic half-space, the wave modes reflected from the boundary at the infinite should be removed. Therefore, there are only waves that travel to infinity. For the one-node layer element, as shown in
Figure 2b, the state vector in the semi-infinite half-space also satisfies
That being so, the following eigenvalue problem relating to the infinite half-space needs to be solved.
where
is the eigenvalue matrix, and
is the corresponding eigenvectors. In the eigenvalue matrix, the positive and negative eigenvalues appear in pairs. The real part of the eigenvalue is positive, which represents the wave traveling from infinity to the surface, and the negative one represents the downward wave.
The eigenvalues of
are sorted in descending order, according to the real part value.
In order to solve Equation (28), a new vector
is introduced. Substituting Equation (29) and
into Equation (28), the following relationship can be derived:
The solution of Equation (31) can be expressed as
where
and
are the integration constants. This yields
The radiation boundary conditions require that there be no upward propagating wave, which means the value of
should be equal to zero. In that case, the boundary condition at the bottom interface between the
lth layer element and the half-space will be written as
with
2.4. Moving Load
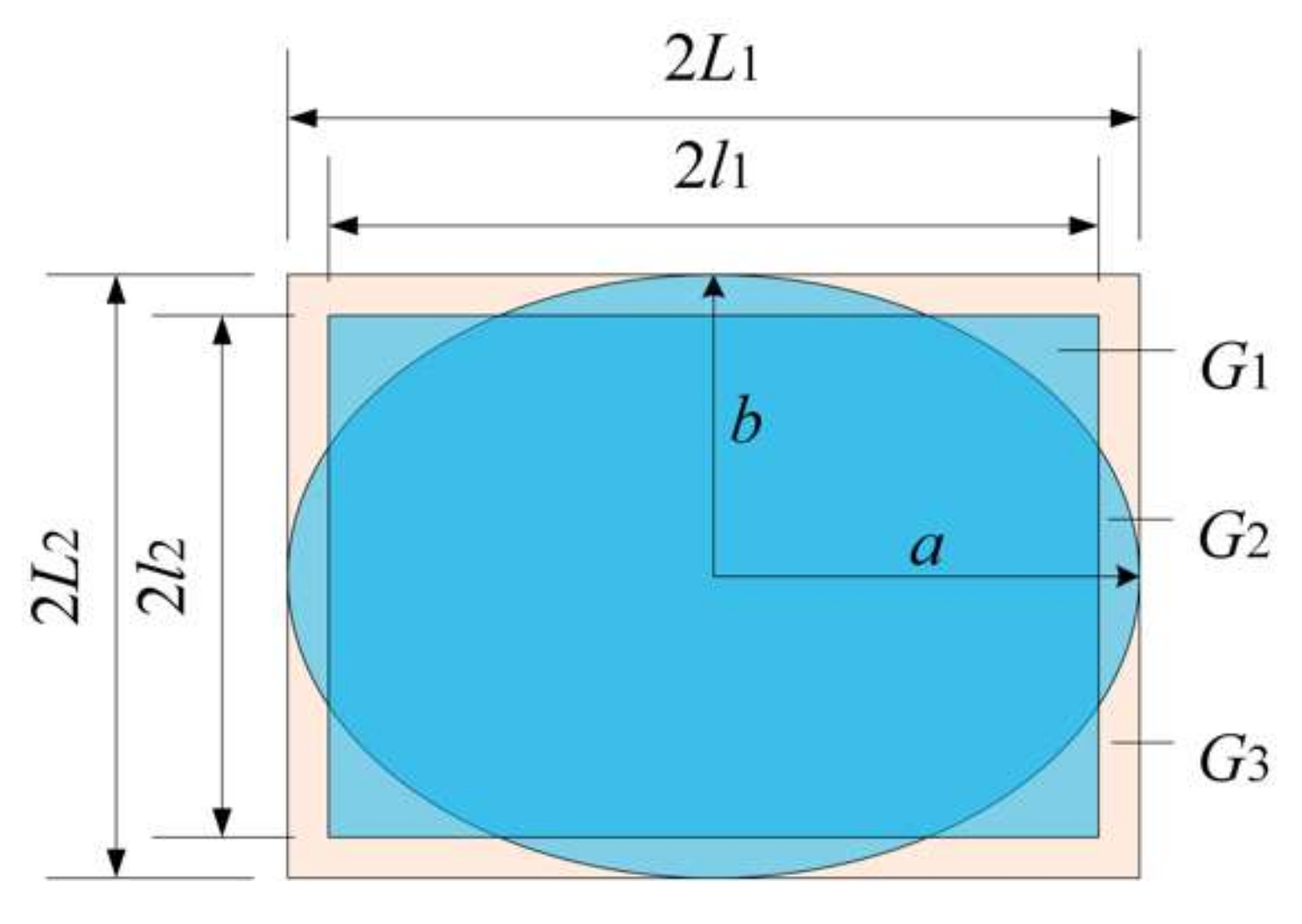
The aspects involved in the tire–pavement interaction mechanism include tire contact area and tire contact pressure. The contact area depends upon several factors, including the axle load, tire type, and inflation pressure. These factors, in turn, have an impact on the distribution of the contact pressure. In the real-world, the outline of the contact area is basically a rectangle or an ellipse full of tread patterns [
45], and the contact pressure distribution is usually not uniform [
46]. However, taking all these factors into account is not straightforward. So, in most studies, the shape of the contact area is simplified to a circle, a rectangle, or an area that combines two semi-circles and one rectangle [
47]. Generally, the contact pressure distribution is also assumed to be uniform across the whole contact area.
To the best of our knowledge, the influence of these different simplified models on ground vibration has not yet been studied. In this paper, two types of distribution are considered: one is the uniform rectangular load. The other assumes a two-dimensional Gaussian distribution over an elliptic area, which is similar to the measured tire–pavement contact pressure distribution in [
46,
48]. We will discuss the ground vibration resulting from each of these two load models (i.e., a rectangular load and a Gaussian bell load) in the time–spatial domain.
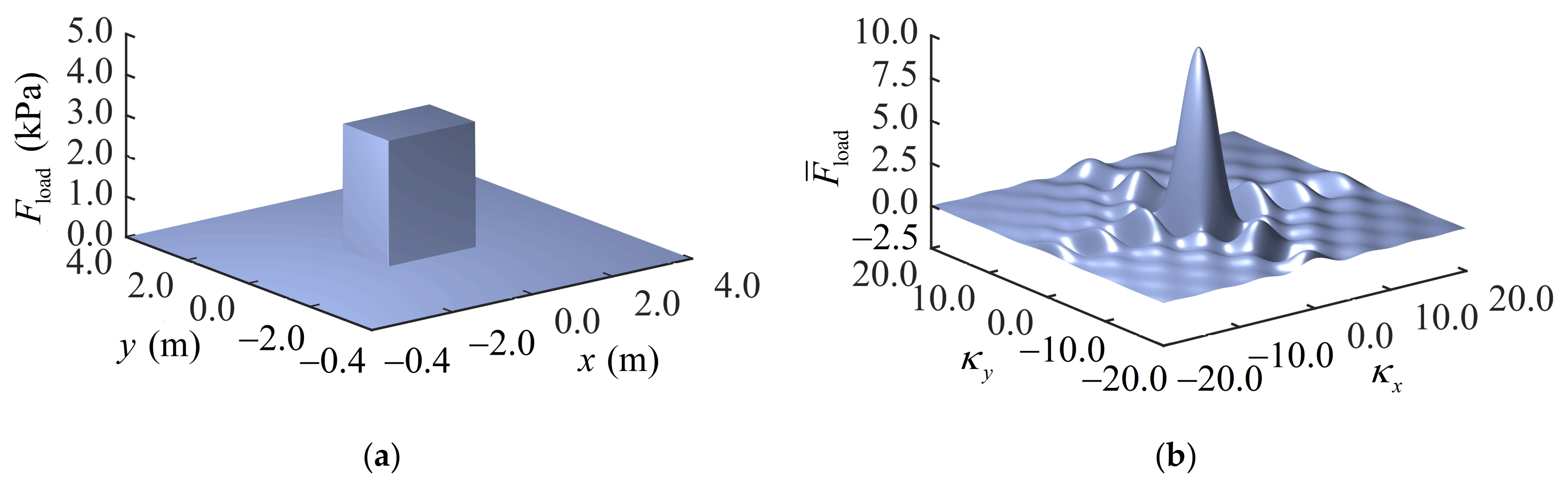
2.4.1. Moving Rectangular Load
As shown in
Figure 1, a vertical load
is applied on the surface of the layered system, which is moving in the positive
x direction with a constant velocity of
c across the free surface, and it can be expressed as
in which
is the function of the time history of a load, and
indicates the function of the spatial distribution of the loads. Based on the assumption of a steady state analysis, the loads have a harmonic time dependence,
, with
denoting the angular frequency of the loads, which can be expressed as
where
is the magnitude of the vertical load. The load in the transform domain can be obtained by the Fourier transform.
For a moving rectangular load, this vertical harmonic point load,
, is distributed uniformly over a rectangular area with a size of
, and it can be expressed as
in which
is the Heaviside step function. The Fourier transform was utilized for the moving rectangular load, with an
x-axis and a
y-axis, and the load in the transformed domain is obtained as follows:
where
denotes the Dirac delta function.
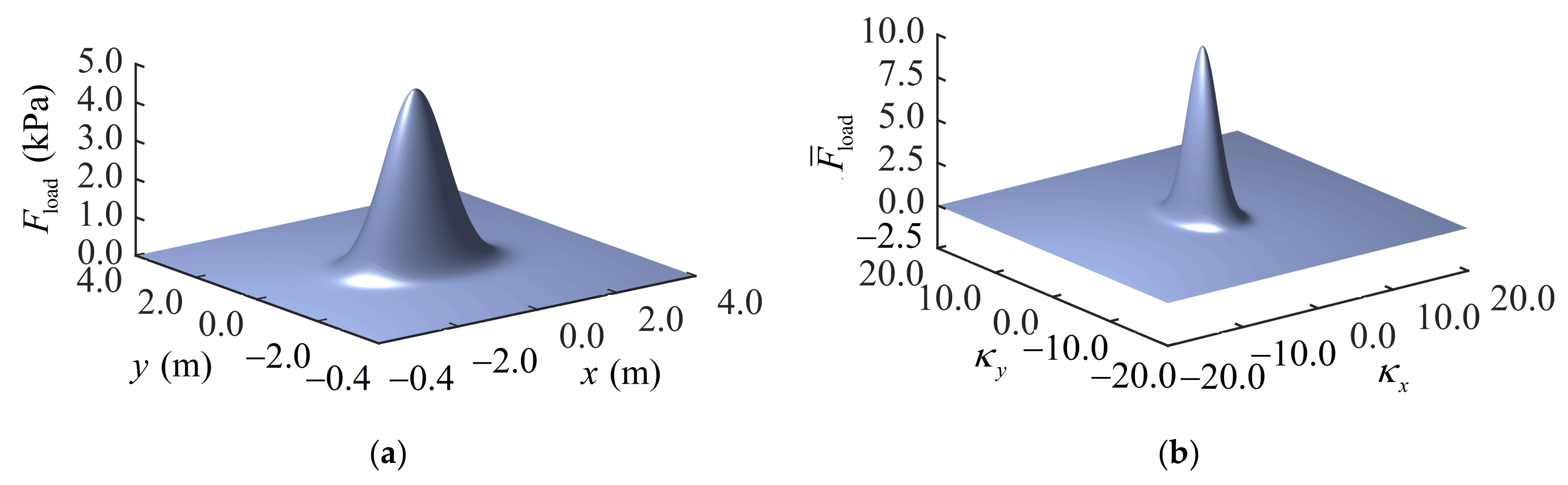
2.4.2. Moving Bell Load
If the vertical harmonic load,
is distributed over an elliptical area, with an intensity that obeys a two-dimensional Gaussian distribution. It can be expressed as a moving Gaussian bell load as follows:
in which the parameters
and
are expectations in the
x and
y direction, respectively; the parameters
and
are the standard deviation of the bell load, describing how fast the intensity decays in the
x and
y direction, respectively. In this paper,
and
are set to zero. The Fourier transform was applied to the moving bell load with an
x-axis and a
y-axis, meaning the load in the transformed domain can be obtained.
2.5. Solution of Layered System
The stiffness matrix of the two-node layer element (Equation (25)) and the one-node layer element (Equation (35)) is assembled via the traditional finite element stiffness matrices for the finite elements in a structure. The global system of equations are expressed as
with
where
m represents the
mth wave mode corresponding to the
x-axis direction wavenumber
, and
n represents the
nth wave mode corresponding to the
y-axis direction wavenumber
.
represents the summation of layer elements related to interface
j. The compact form of the Equation (43) can be expressed as
In practice, the nodal force vector is known, and the displacement is unknown. From Equation (44), the displacement is obtained.
in which
is the inverse of
.
For a certain wavenumber,
and
, the moving load can be achieved by using Equation (40) and Equation (42) for the rectangular loads and the bell loads, respectively. The corresponding nodal force vector can be obtained as follows:
in which
is the load indication vector, in this case. The third component is one, and the others are zero. According to the theory of SEM, the displacement response is obtained by summing a finite number of wave modes with different discrete frequencies.
where the integer
m ranges from −
M to
M, and integer
n ranges from −
N to
N. In order to ensure the accuracy of the solution,
M and
N should be large enough. The summation of
M and
N wavenumbers can be carried out by use of the fast Fourier transform (FFT).
It should be noted that only the displacement on the same surface as the nodal elevation can be obtained. If the concerned node lies between two layers, another layer interface is required, passing this node.
4. Conclusions
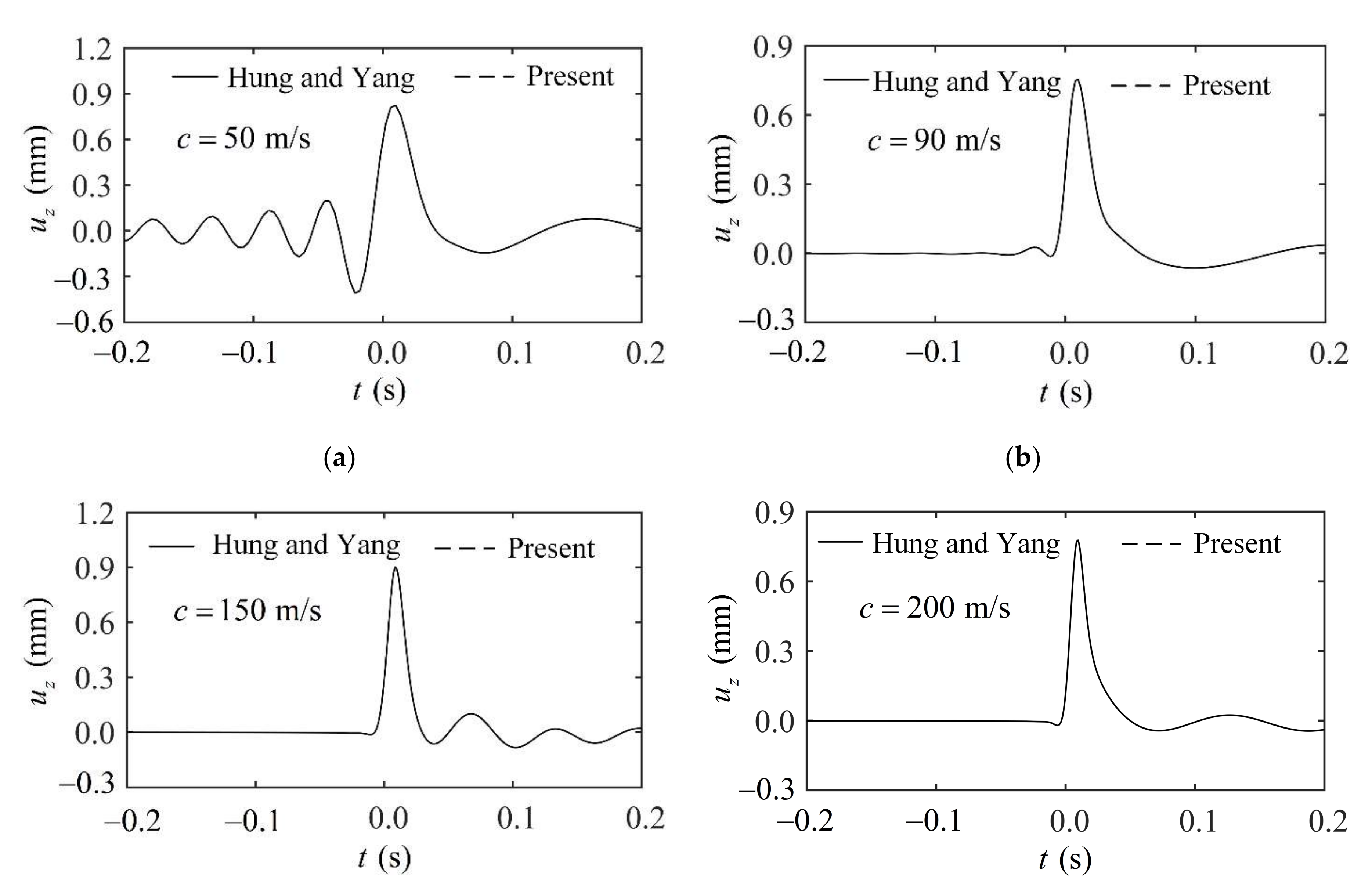
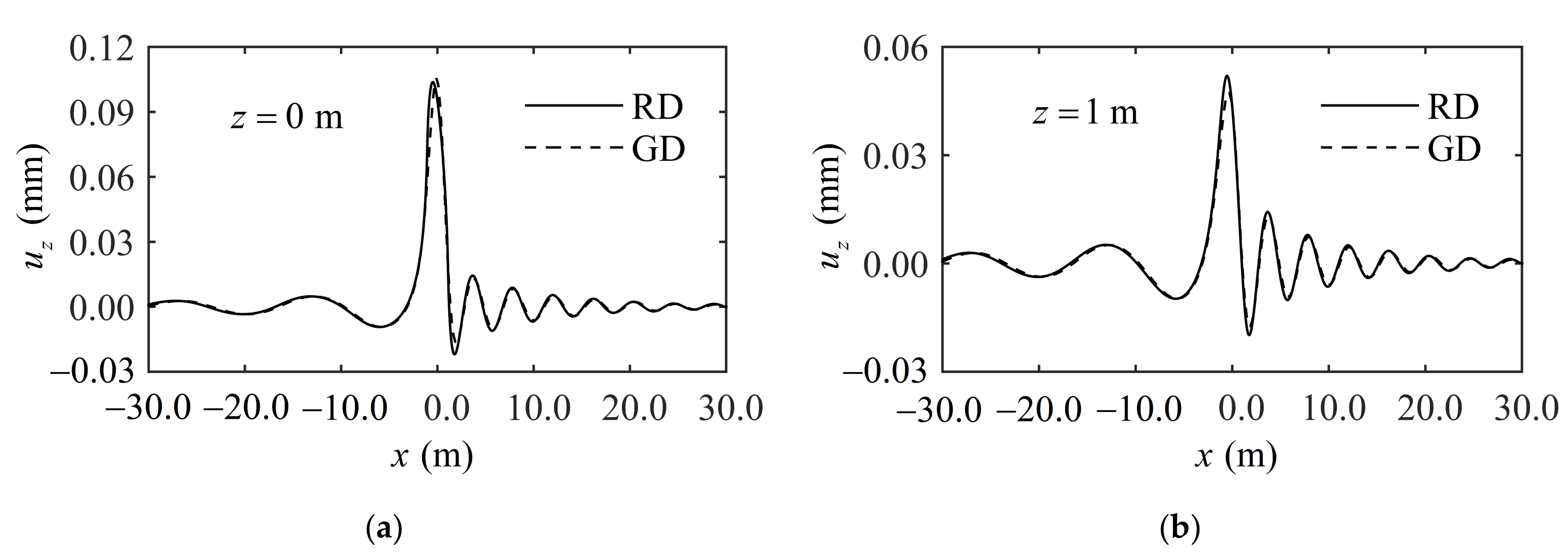
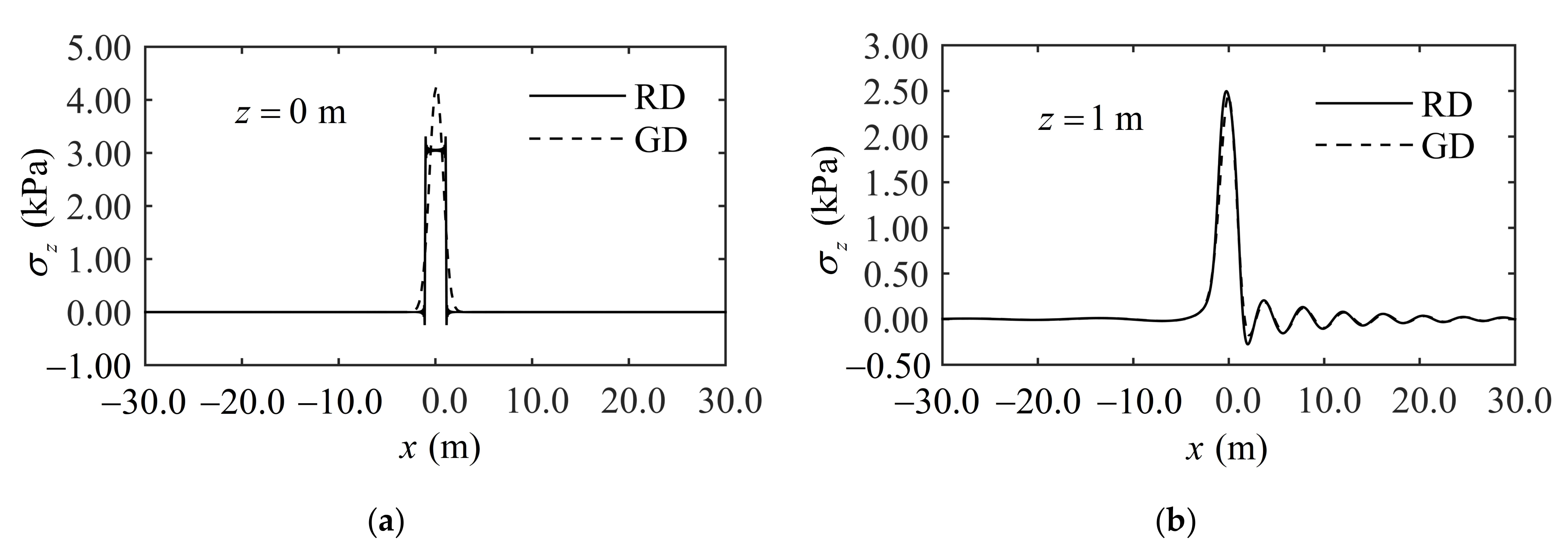
This paper presents a modified spectral element model suiigure for solving the dynamic response of a 3D, multilayered, elastic half-space regarding a moving load based on a state transition matrix and a precise integration algorithm. Numerical examples have confirmed the reliability and precision of the proposed procedure through a series of comparisons between existing solutions for both subsonic and supersonic cases. The main advantage of the proposed method is its robustness and versatility. It can be used to analyze wave propagation in an isotropic- or anisotropic-layered half-space without additional work. An equivalent conversion rule was used to simplify the uniform rectangular load typically used in tire contact models to a Gaussian bell load, resulting in a reduction in the number of sampling points in the FFT procedure. The numerical example shows the accuracy of the equivalent conversion rule.
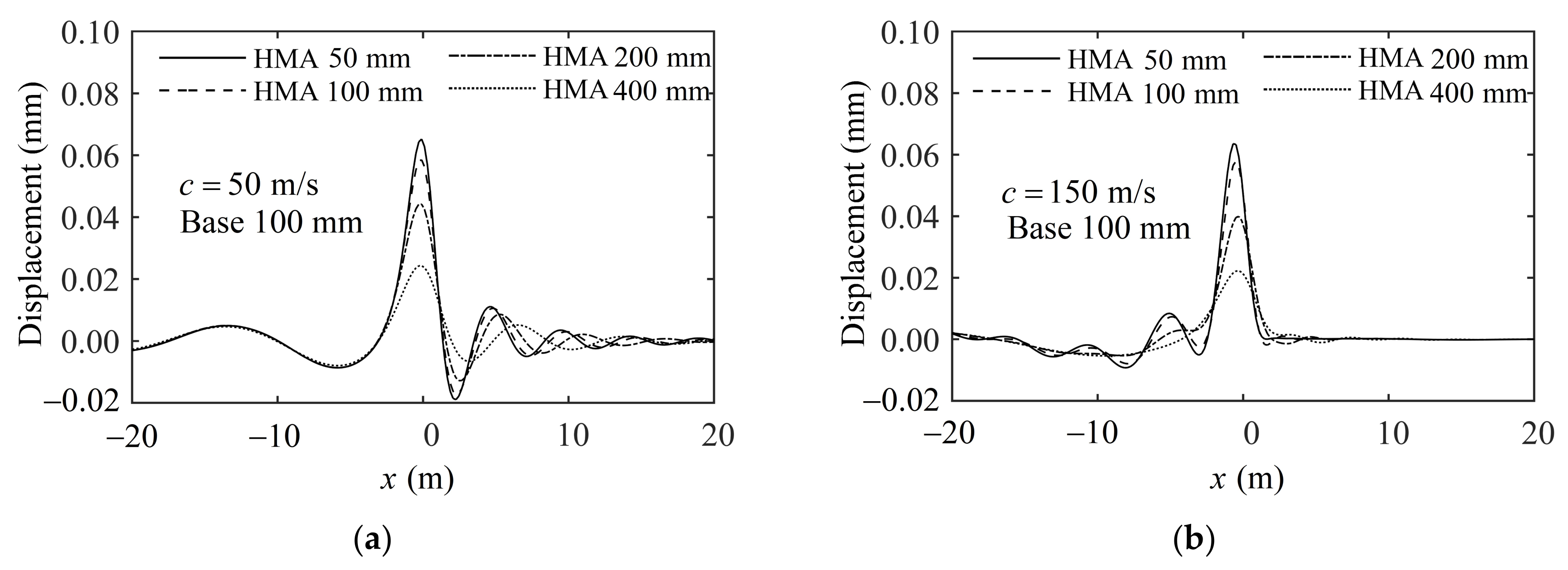
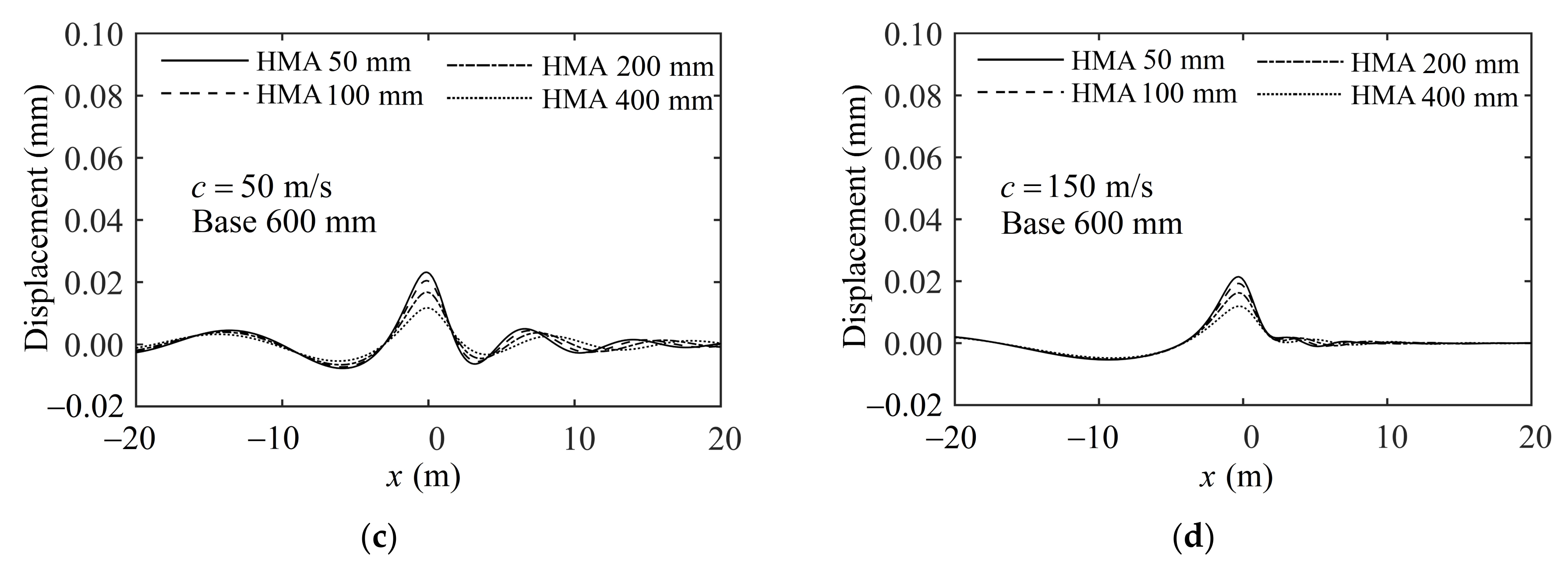
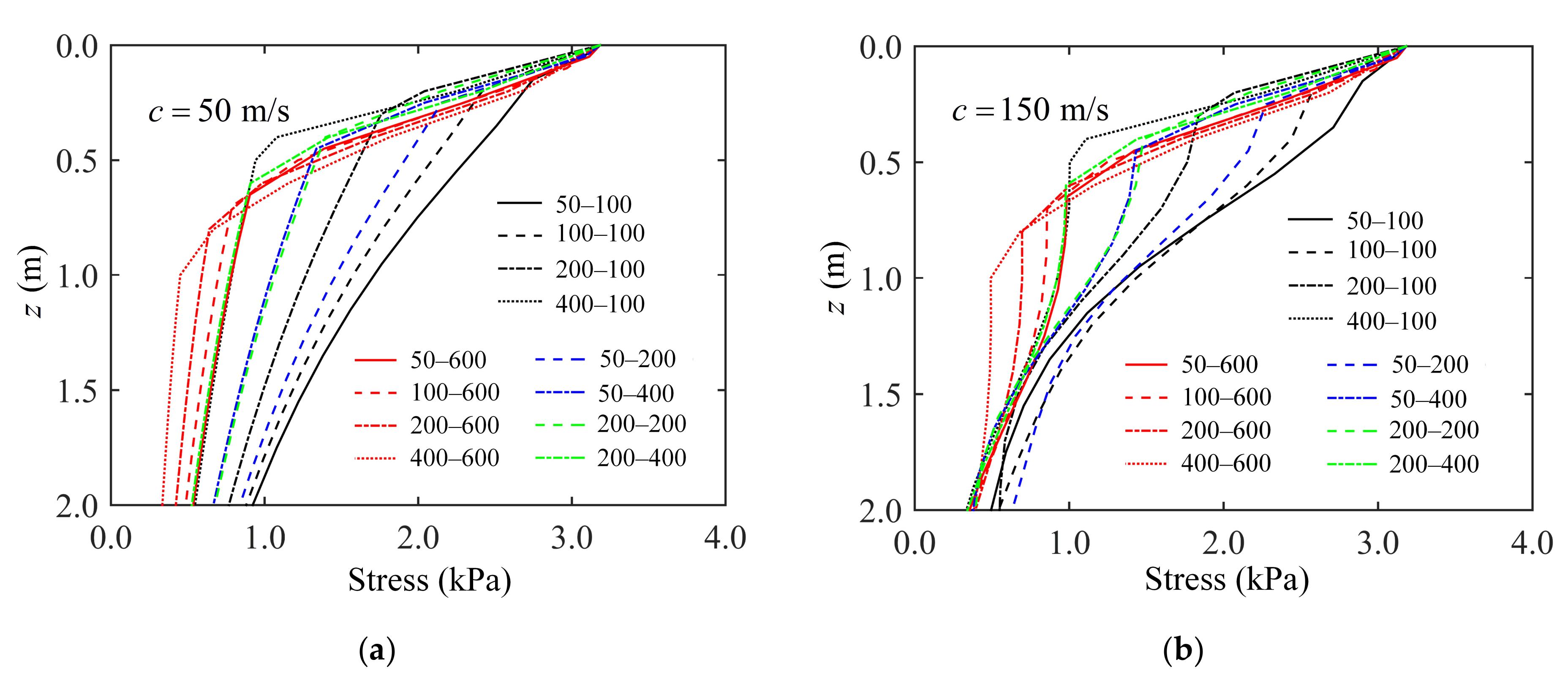
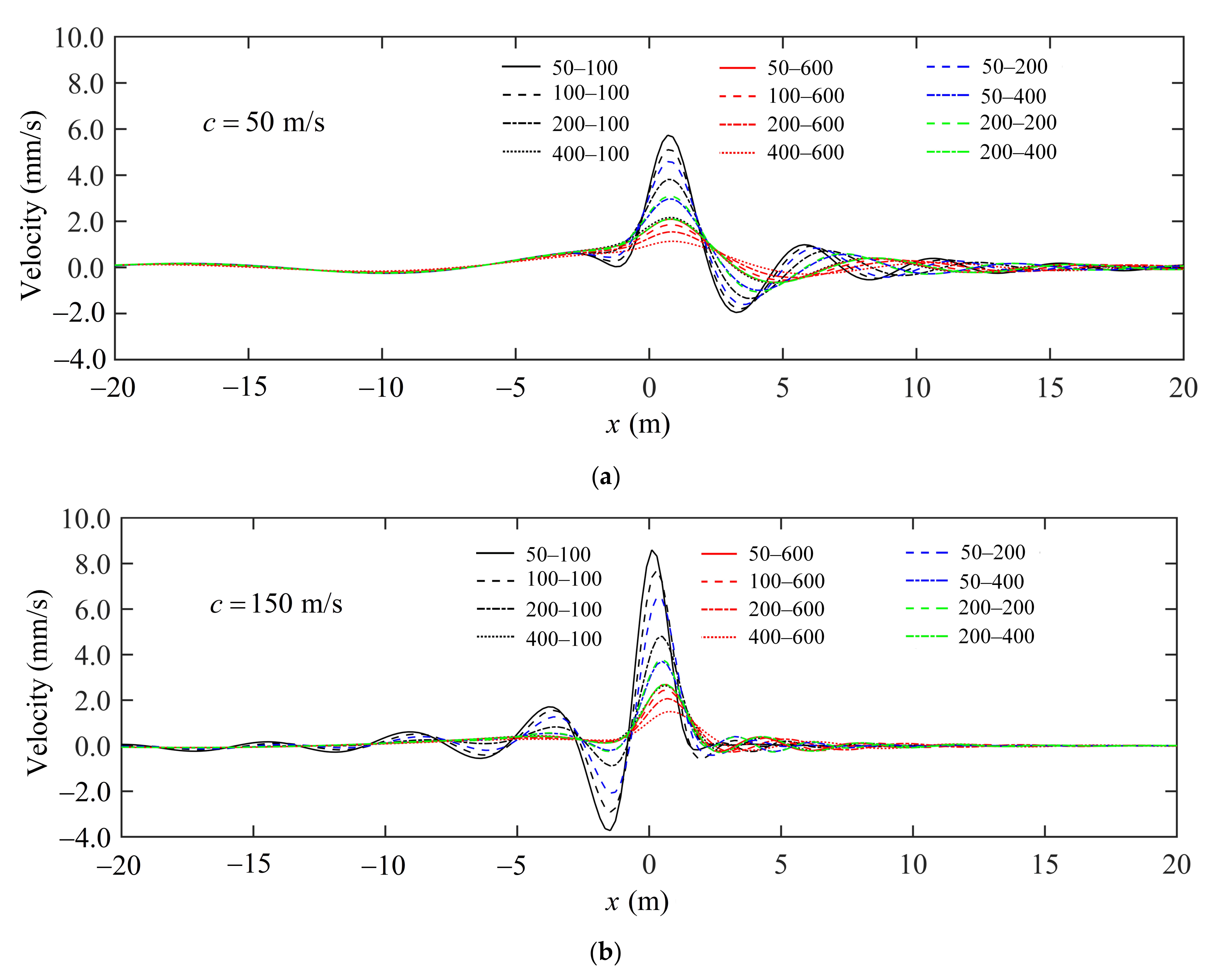
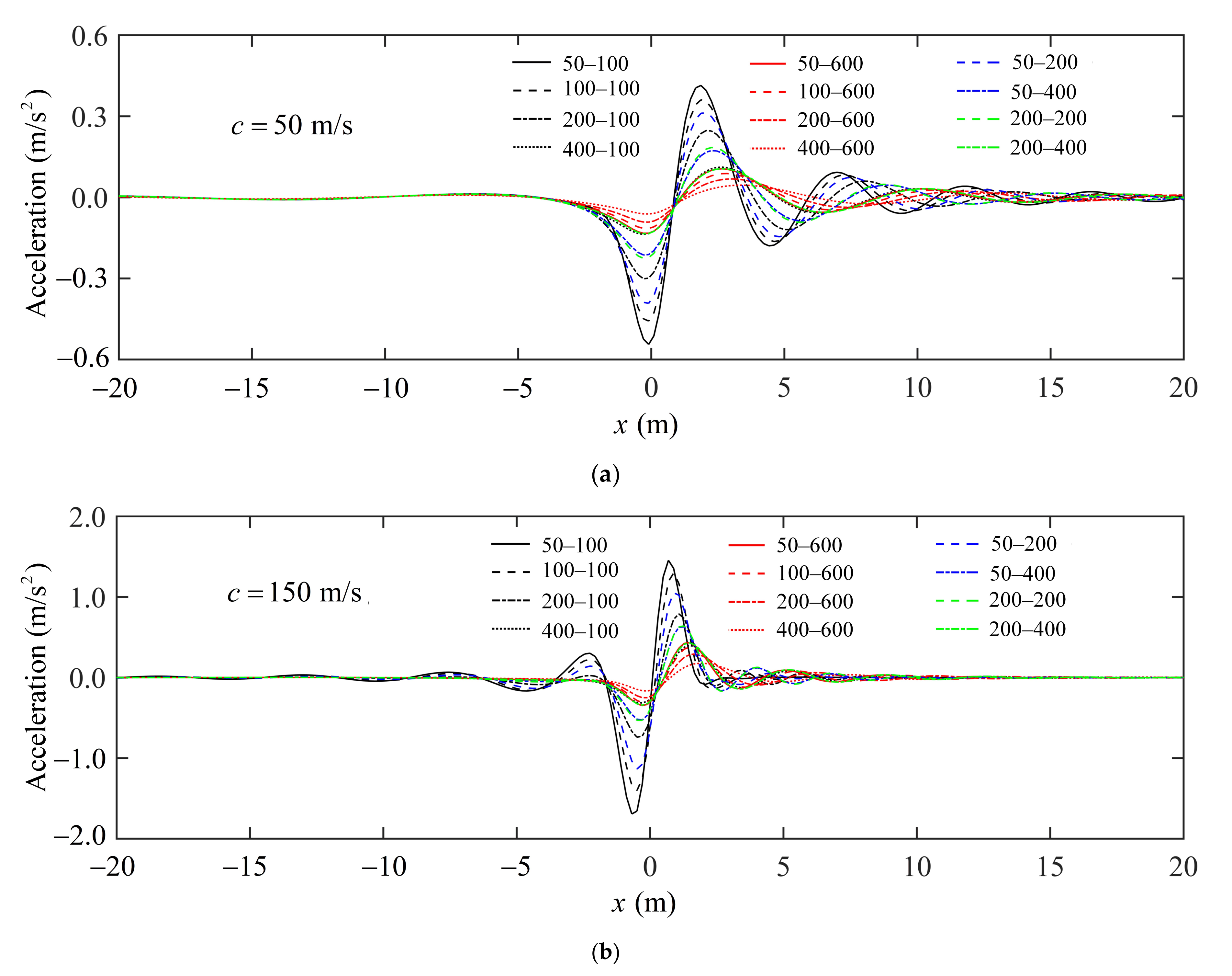
For a fixed modulus in both base and HMA layers, it was found that thicker HMA and base layers can reduce the amplitude of the fluctuations in the response. As the HMA thickness increases, the decrease ratio for the maximum displacement of the base layer, with a thickness of 600 mm, is no more significant than it is for a base layer with a thickness of 100 mm. However, a thicker base layer can reduce the response noticeably if the thickness of the HMA layer is less than 100 mm. The vertical stress along the z axis decreases more rapidly if the thickness of the HMA layer increases. So, overall, the most effective way to decrease the response is to increase the thickness of the HMA layer.
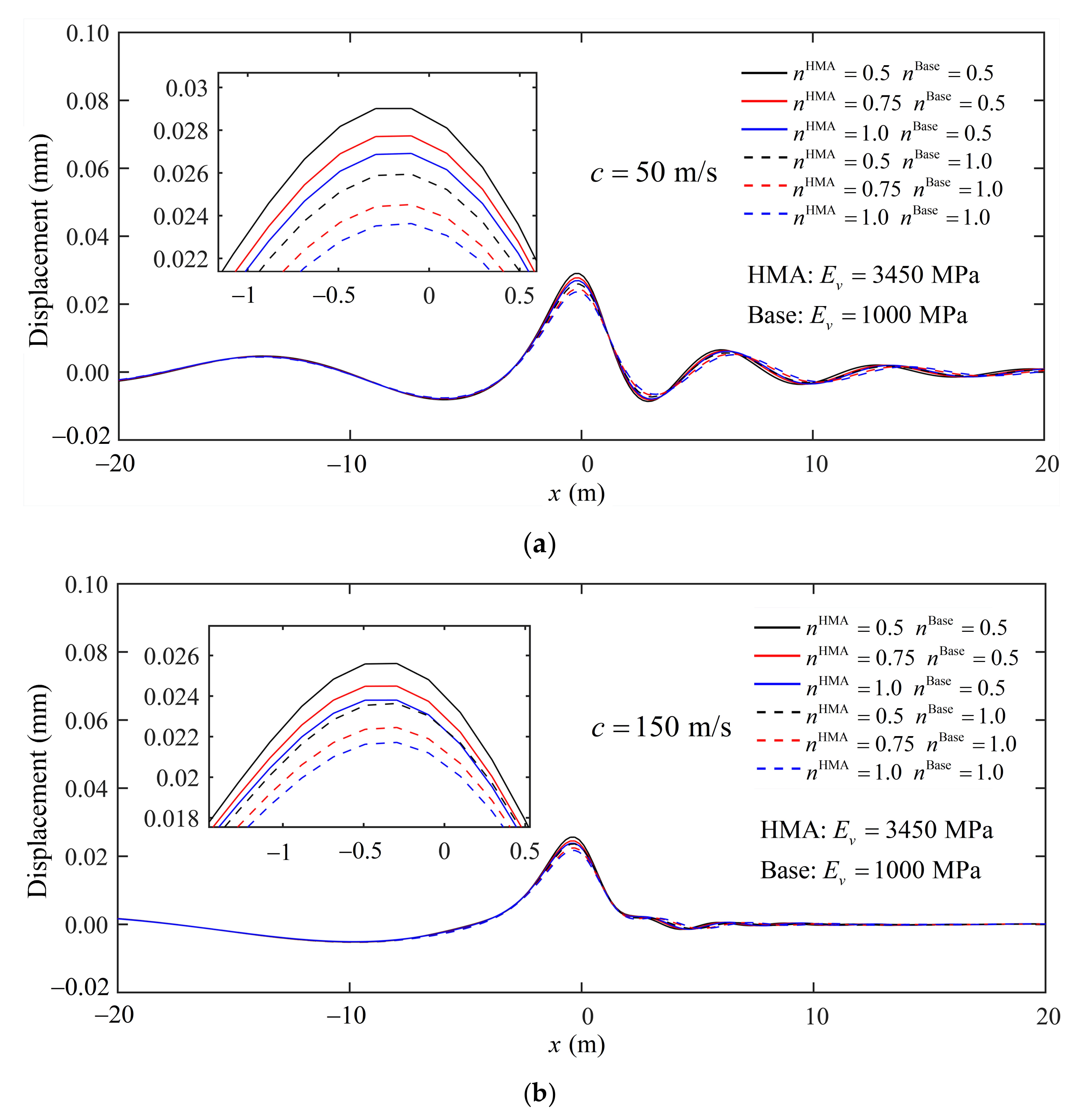
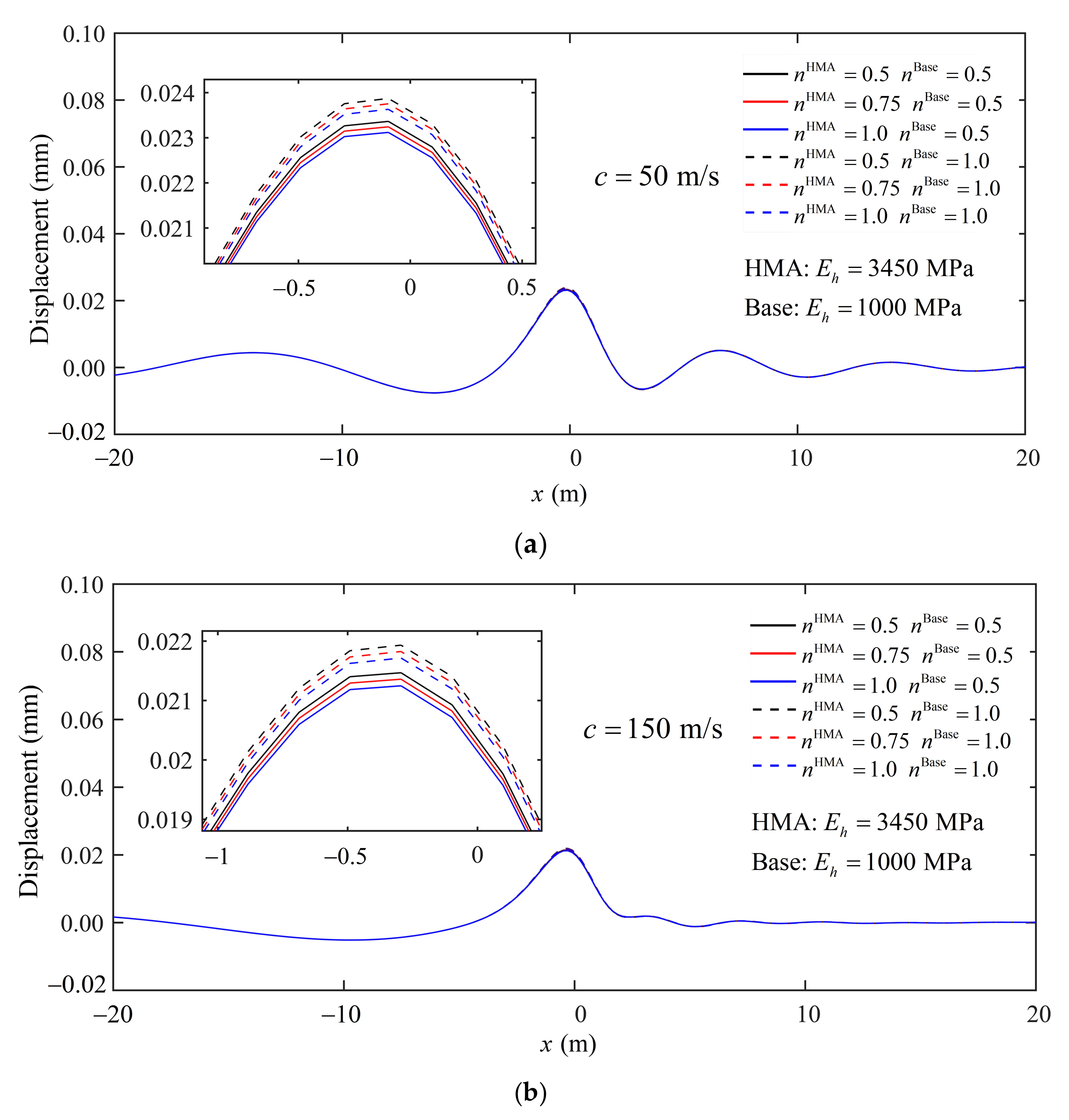
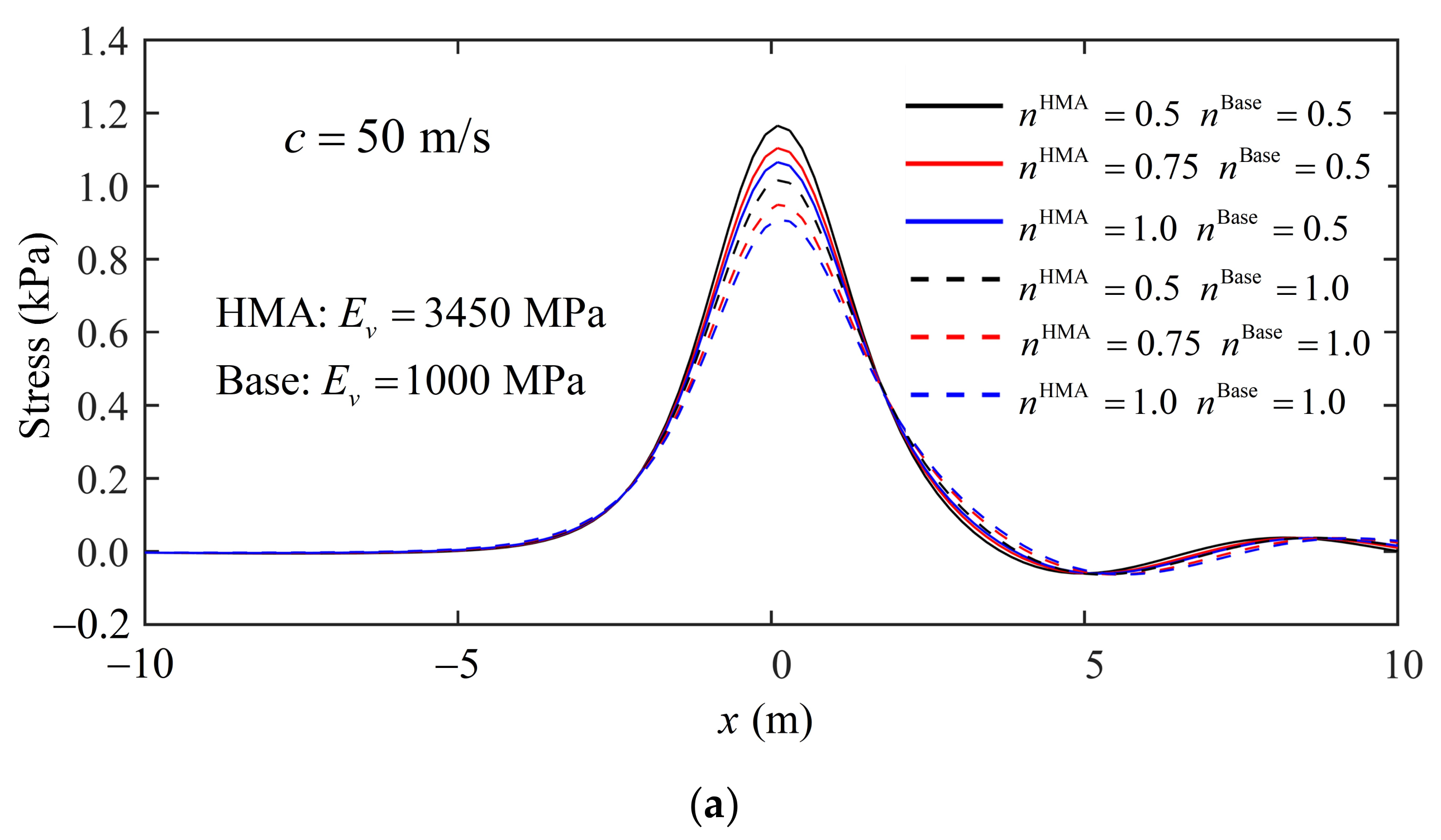
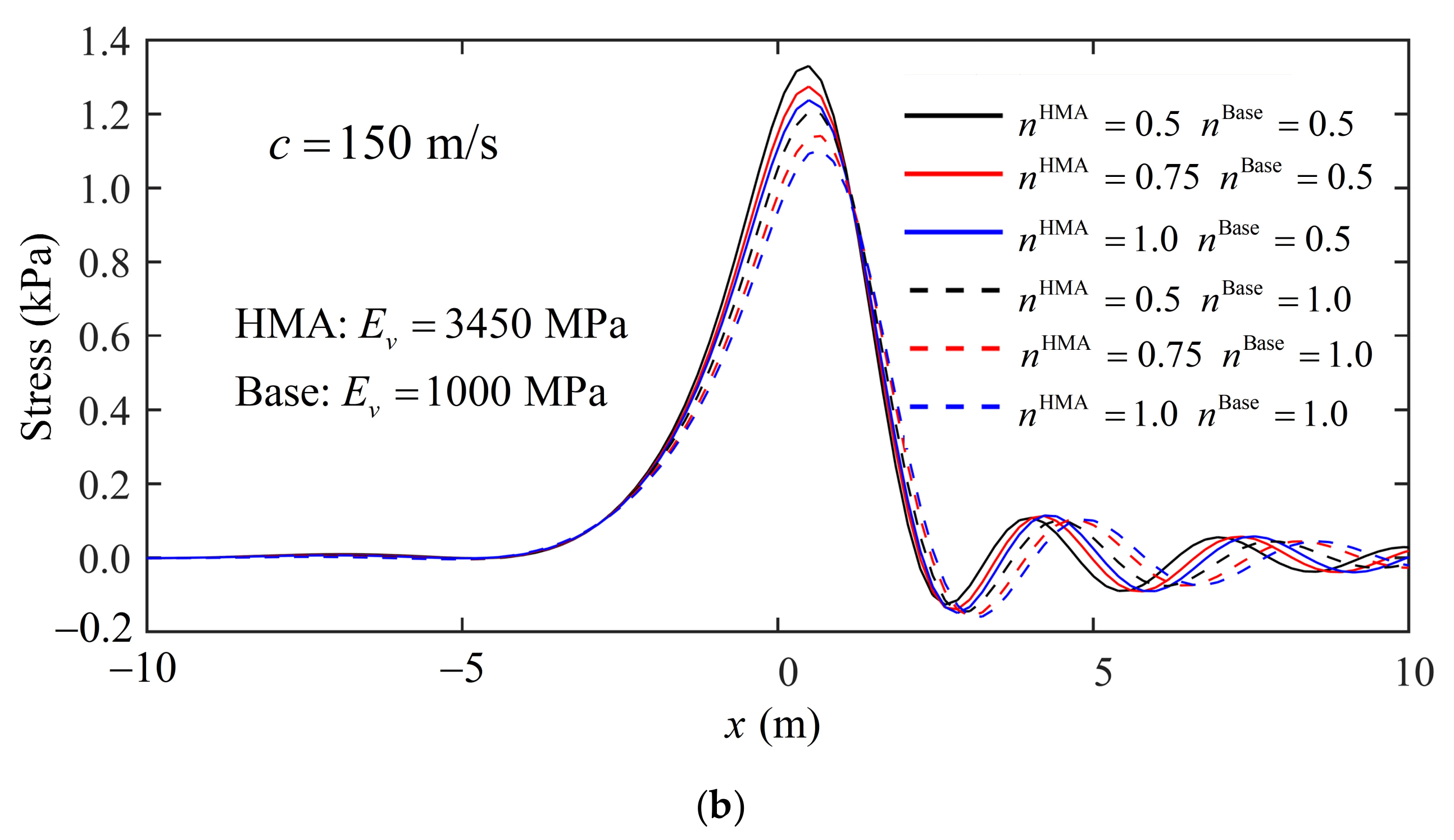
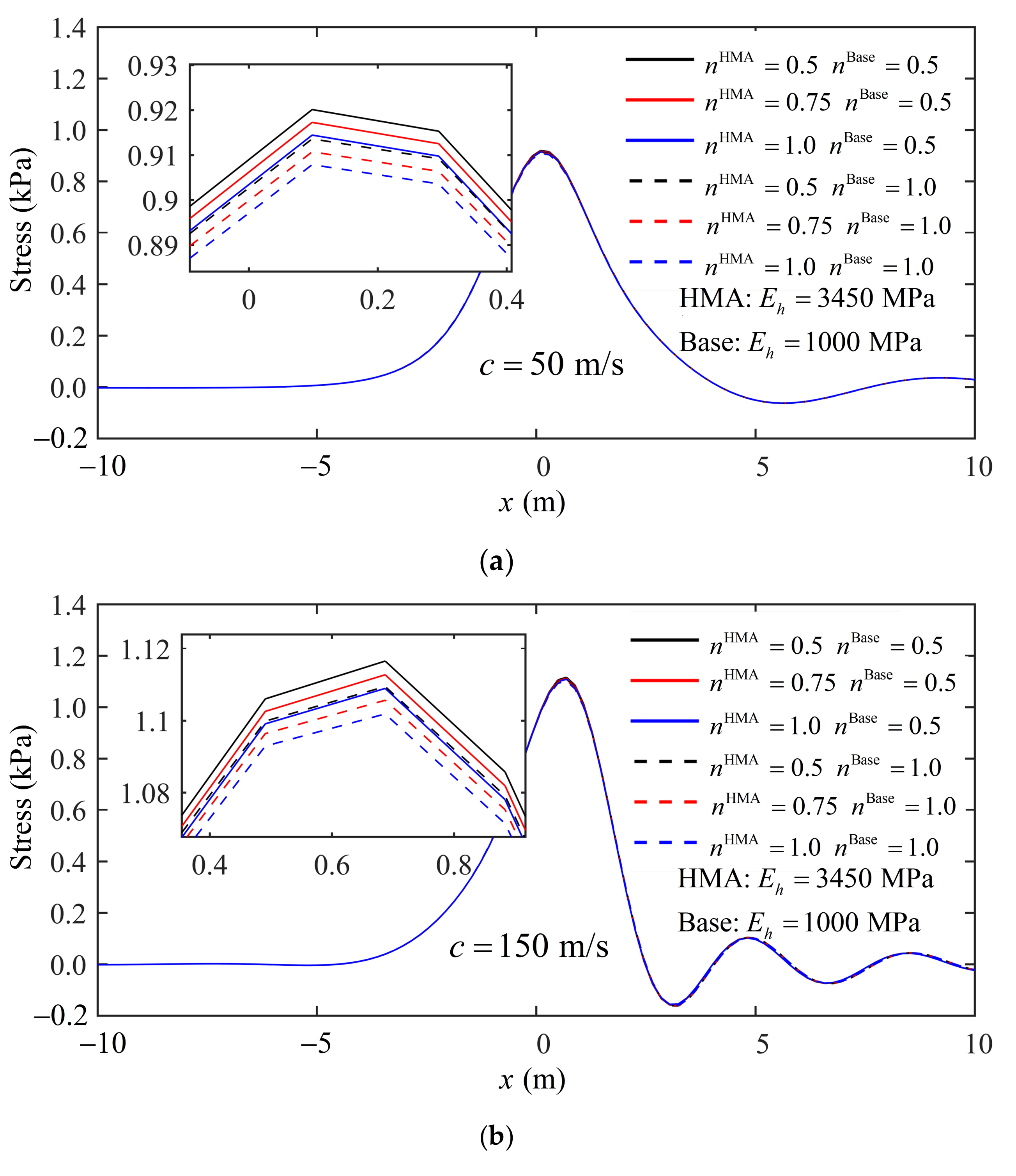
With regards to the transverse isotropy, it was found that a larger horizontal Young’s modulus, , for either the HAM or base layer can help reduce the amplitude of the displacement and stress. As the vertical Young’s modulus, , of the HMA layer increases, the maximum displacement at the road surface and the maximum stress at the lower bound of the base increase. A base layer with a smaller can decrease the maximum stress, and can increase the maximum displacement. However, the horizontal Young’s modulus, , of the HAM or base layer has a significant effect on the dynamic response when compared to the vertical Young’s modulus,.
The results in this paper relate to a three-layer road structure that was subjected to a single moving harmonic load. For other elastic multilayered systems with multiple moving loads, obtaining the response will require the adoption of a similar approach and the principle of superposition. The present solutions may be valuable for developing analytical formulations for the analysis of problems involving an anisotropic multilayered medium.























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}