3.3.1. Simply Supported Beam
The simply supported beam’s geometrical characteristics are reported in
Figure 3. Its density is 7746.90 kg/m
3, the steel longitudinal elastic modulus
Es-real is 203 GPa, while dimensions are
L = 1499.00 mm,
b = 118.82 mm, and
h = 6.39 mm.
Figure 3 presents the experimental set up. The positions of the vibrodyne and accelerometer were chosen in order to avoid the nodes of the beam eigenmodes, i.e., the sections that do not undergo any displacement during the vibrations in natural modes. The accelerometer is located 435 mm from the right side and symmetrically to the vibrodyne which was placed 435 mm from the left side, see
Figure 4.
The vibrodyne was used by varying randomly the rotation speed. In this way, it was possible to record several samples with different harmonic force. In order to have a statistical consistency, the test was repeated 6 times with a sampling frequency equal to 500 Hz.
Actually, since an OMA approach was adopted, the random rotation speed of the vibrodyne was approximated as a white noise.
The acceleration response time histories were obtained for each case and the first 5 flexural modal frequencies were identified (see
Table 3 and
Figure 5) using the fast Fourier transform [
32] and the peak picking method [
5]. As is well-known, see [
33], this technique is based on the low damping and well-separated modes hypotheses that can be assumed for this case.
The matrix of the cross-spectral density (spectral matrix) presents on its diagonal terms the real valued autospectral densities and it is defined as:
where
is a vector containing the acceleration responses in the frequency domain and
is the complex conjugate transpose matrix, while
represents the expected value. In the Peak Picking approach, in the neighbourhood of an eigenfrequency
the spectral matrix is approximated by:
where
is a parameter depending on the damping ratio, considering eigenfrequency, excitation spectra, and modal participation factor, see [
33,
34].
is the mode shape vector corresponding to frequency
. In this paper, the beam eigenfrequencies were identified from the resonant peak in the autospectral density using the PP approach. The method was quite efficient since the considered eigenmodes were well-detached, as is typical for simple structures such as beams. In case of eigenmodes close to each other, it is possible to filter the accelerometric data in order to improve the accuracy or to use different approaches such as FDD [
7], TDD [
8], or SSI [
9].
In order to perform the structural identification, we developed an analytical beam model based on the Euler–Bernoulli theory with the aim of identifying the longitudinal elastic modulus. It was previously measured with a quasi-static test, so its benchmark value is known.
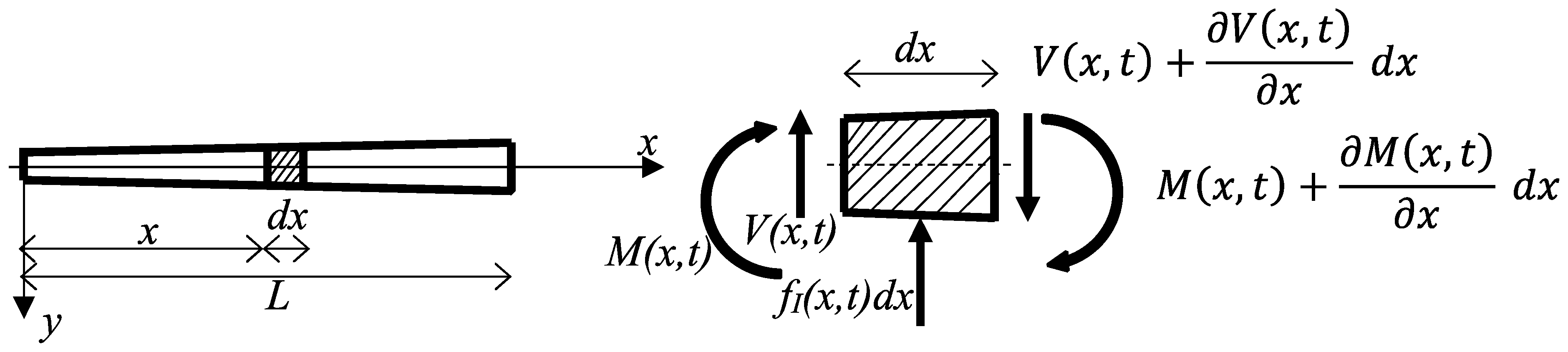
The Euler–Bernoulli beam theory takes into account bending stiffness and transversal inertia and assumes that plane sections remain plane and perpendicular to the beam axis after deformation, see
Figure 6. In case of free vibration, the equation of motion is:
where
represents the mass per unit lenght of the beam,
M is the bending moment,
v is the deflection, and
t is the time.
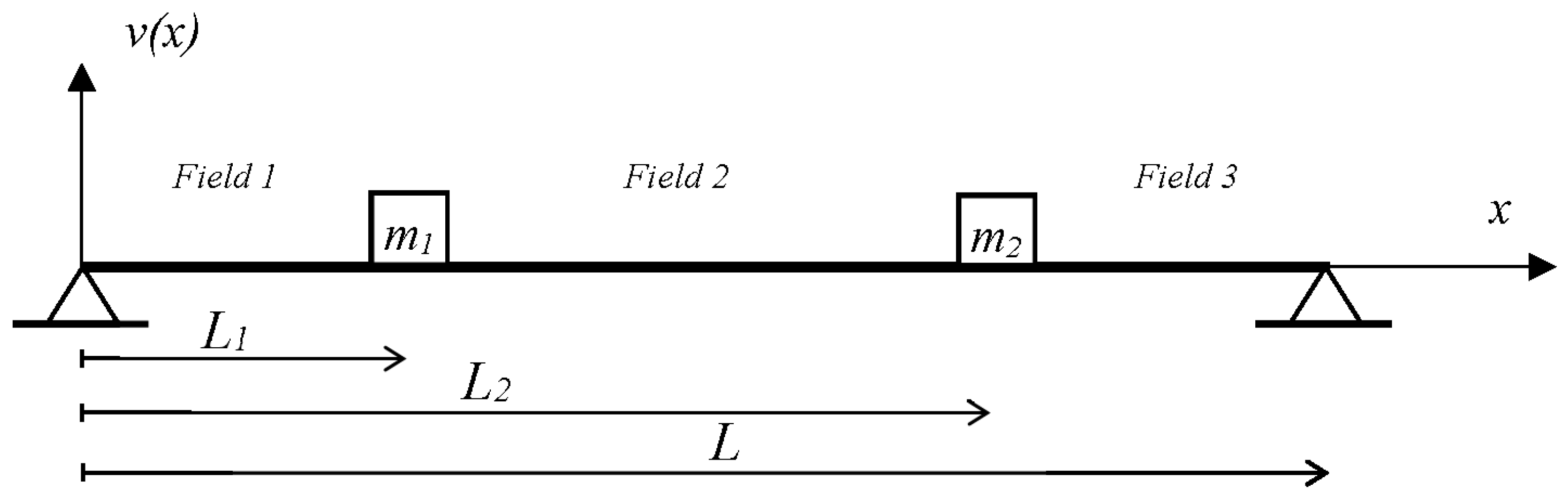
Given the mass of the accelerometer (0.89 kg), of the vibrodyne (0.93 kg), and of the beam (8.82 kg), it is necessary to take into account the exact position of these masses also in the analytical model. For this reason, the Euler–Bernoulli beam Equation (7) has been integrated considering the three different fields separated by the two lumped masses of the vibrodyne and of the accelerometer, see
Figure 7.
In each field, by means of the separation of variables technique, it is possible to distinguish between the time harmonic solution and the space variation of the solution:
where
is the time,
represents the position along the beam,
is the
j-th eigenmode, and
is the
i-th natural circular frequency of the beam. The relationship between frequencies and circular frequencies is:
. Given
and considering the three fields of integration, it is possible to prove (see [
35]) that:
where
vij denotes the spatial solution of the
i-th field related to the
j-th eigenmodes, and
Aij represents the generic integration constant that can be determined using the boundary conditions. The 12 boundary conditions expressing static and cinematic compatibility are presented in the following system of equations expressed in matrix notation:
where
D is the matrix of the system, and
A is the vector containing the unknown integration constant.
In order to avoid the uniqueness of null solution, it is necessary that:
Equation (11) represents the frequency equation whose roots are the circular eigenfrequencies of the beam. Unfortunately, this equation can be solved only with a numerical approach; consequently, it is not possible to find a close form solution. For this reason, an iterative semianalytical algorithm was developed in Matlab
TM 2013 [
36] that finds the eigenfrequency of the beam using Equation (11).
Thus, now it is possible to use the above mentioned experimental eigenfrequencies to set up an iterative procedure capable of finding the longitudinal elastic modulus value Es:
The steps are repeated till a minimum value of error
e is obtained.
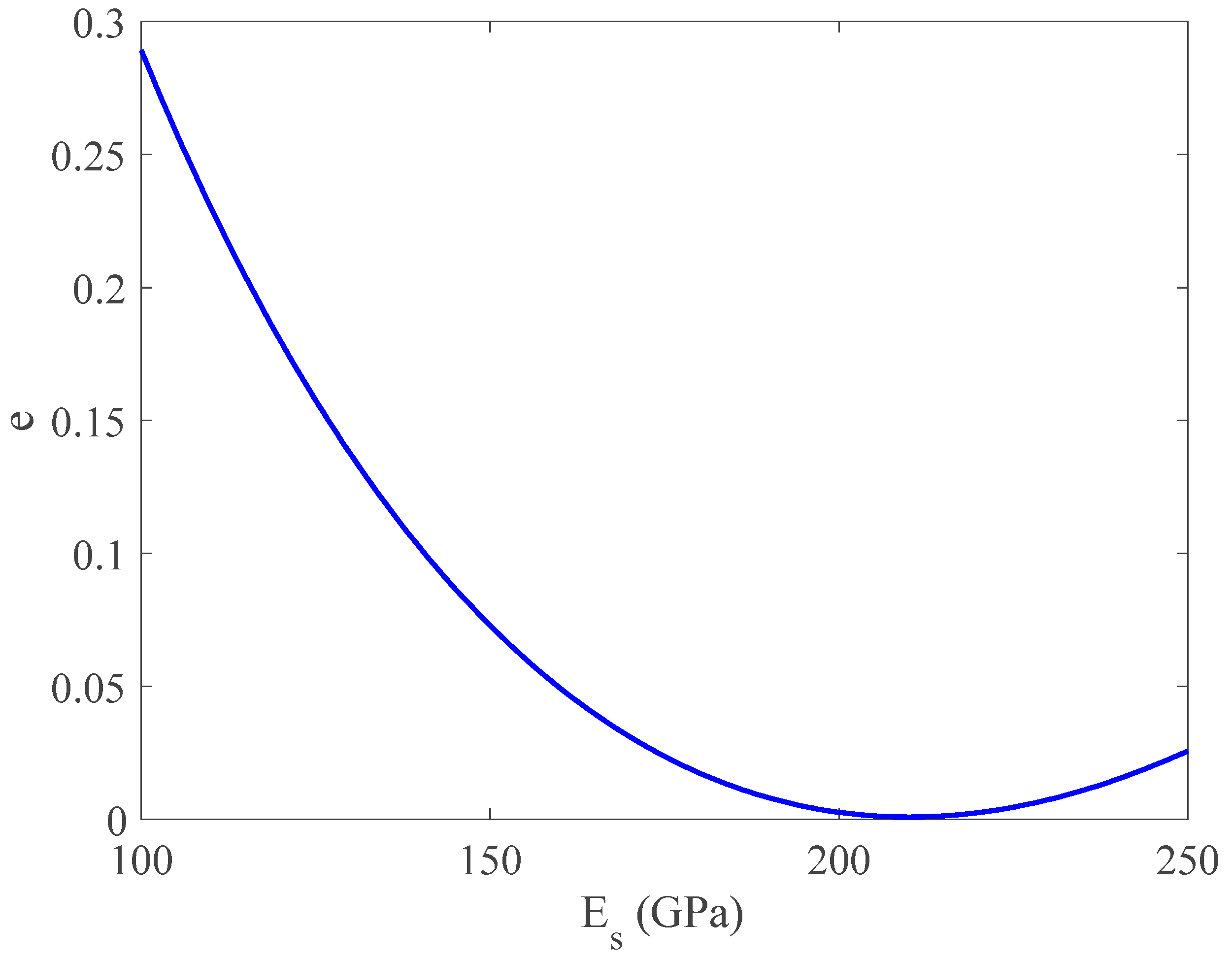
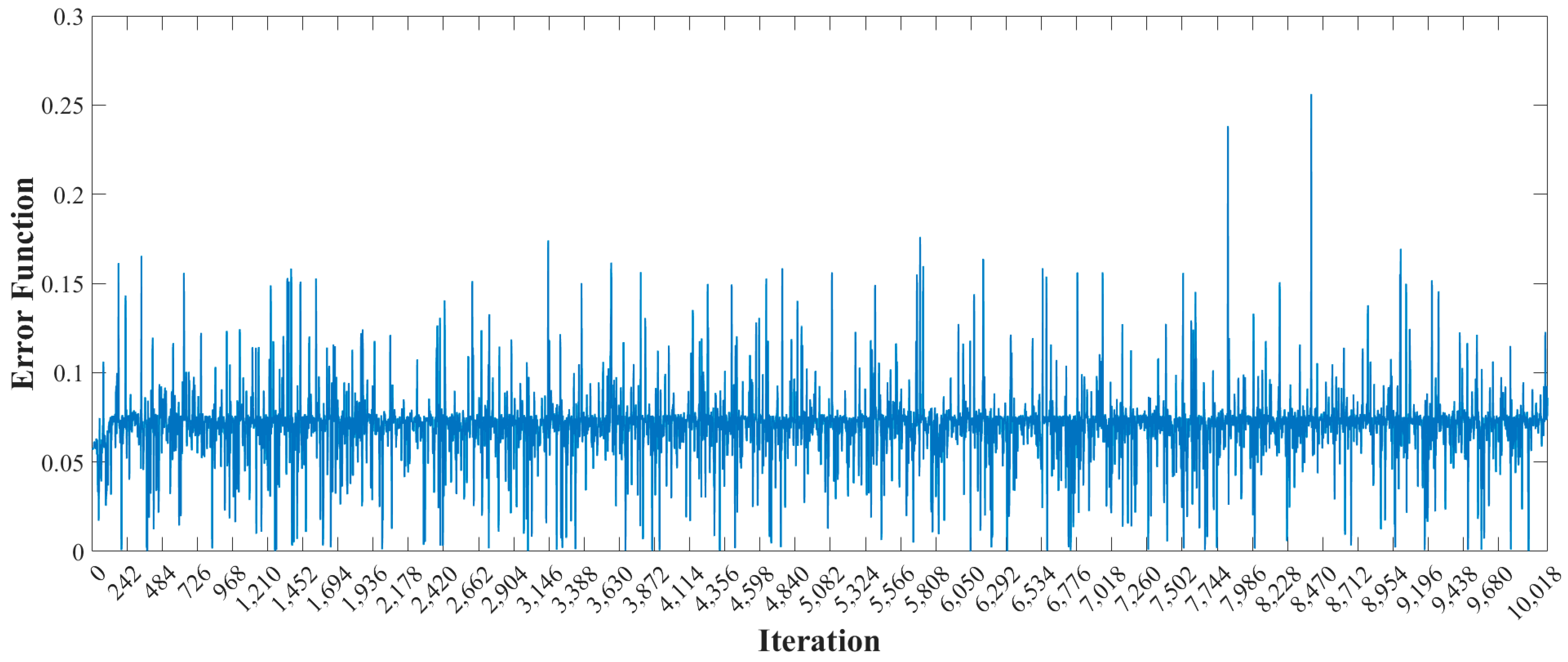
Figure 8 presents the trend of error function
e that easily points at the optimal value of
Es-opt = 205 GPa. In this way, it was possible to have very little relative error (less than 1%) between the real
Es-real = 203 GPa and the ones that minimize the difference in the eigenfrequencies, see
Table 4, confirming the accuracy of the developed approach. Thus, when measuring the experimental eigenfrequencies, it is possible to set up an inverse problem that can allow to determine the unknown mechanical characteristics.
This first application represents a validation for both the modal analysis and the parametric identification. Indeed, it was developed with known eigenfrequencies and material mechanical properties.
3.3.2. Cantilever Beam
The cantilever beam geometrical characteristics are different from those of the simply supported beam. Indeed, its density is 7652.02 kg/m
3, the steel longitudinal elastic modulus
Es is still 203 GPa, while geometrical dimensions are
L = 820.00 mm,
b = 119.97 mm, and
h = 10.08 mm. To create the full constraint, the beam was clamped for a length of 120 mm.
Figure 9 presents the experimental set up for the cantilever beam, which shows the positions of the vibrodyne and of the accelerometer on the free side in order to avoid, once again, the nodes of the beam eigenmodes and maximize the vibration amplitude. The vibrodyne was still used while varying randomly the rotation speed (in order to mimic the white noise condition) and the test was repeated 6 times with a sampling frequency equal to 500 Hz.
For this case study, the first three flexural modal frequencies were considered.
Figure 10 shows the considered beam eigenmode shapes, and
Table 5 shows the respective eigenfrequencies measured in the experimental tests.
In order to take into account the uncertainties due to the experimental constraint, a flexural spring and a translational one were introduced in the analytical model.
Given the position of the mass of the vibrodyne and the accelerometer in this experimental case, the Euler–Bernoulli beam Equation (7) was integrated while considering only one field with a lumped mass on the free end, see
Figure 11.
Following what was performed in
Section 3.3.1, the space variation of the solution is expressed by Equation (12):
In this case, the four boundary conditions express the static and cinematic compatibility represented by Equation (10) already shown in
Section 3.3.1.
Additionally, in this case, the frequency function was obtained by enforcing the singularity of the system matrix in Equation (10) by Equation (11). In this way, by enforcing Equation (11), it is possible to calculate the beam eigenfrequencies as a function of Young’s modulus and the constraint stiffnesses and . Given its strongly implicit form, the roots of Equation (11) must be found with a numerical approach. In this case, again, the optimization procedure is based on minimizing the difference between the model eigenfrequencies (depending on , , ) and the experimental ones obtained by OMA. The optimization was performed by means of the simulated annealing algorithm.
For the described case of a cantilever beam, the minimum difference in eigenfrequencies (see
Table 6) is reached for a value of the longitudinal elastic modulus equal to
= 201 GPa and for values of the constraint stiffnesses equal, respectively, to
and
.
In order to check the consistency of the obtained results, different optimizations were developed varying the initial ranges of the unknown parameters.
Table 7 reports the main results showing a good consistency of
and
, while the values of
presents larger variation.
In addition, it is interesting to analyze the performance of the method when less eigenfrequencies are considered in the target function. For this reason, the optimization was performed considering just the first eigenfrequency, the first two eigenfrequencies, or all three eigenfrequencies.
Table 8 reports the results of this analysis using as initial variation ranges: 1
400 GPa for
, 1
10
10 1
10
2 Nm for
and 1
10
10 1
10
20 N/m for
. Looking at
Table 8, it is quite clear how for the specific problem it is possible to reach a good estimation of the parameters while also considering just the first eigenmode. The information added from the second and third eigenfrequencies does not significantly change the solution.
3.3.3. Comparison to Other Optimization Algorithms
In order to test the efficiency of the proposed methodology based on the SA optimization algorithm, the same cantilever beam case was analyzed using two different heuristic algorithms: ant colony [
19] and particle swarm [
20].
The ant colony (AC) algorithm is a type of swarm intelligence algorithm inspired by the behavior of ant colonies. It is used to find the shortest path between two points in a graph. The algorithm simulates the behavior of ants as they search for food. In fact, each ant drops a pheromone trail as it traverses the graph, so that other ants are more likely to follow the paths with stronger pheromone trails. Over time, the pheromone trails will converge on the shortest path. The algorithm also includes a pheromone evaporation mechanism to prevent the trails from becoming too strong.
The particle swarm optimization (PS) algorithm is a type of optimization algorithm inspired by the behavior of bird flocks and fish schools. It is used to find the optimal solution of a problem by simulating the behavior of a group of particles, where each represents a possible solution. The particles move in the search space, guided by their current position and the best position encountered so far by any particle in the group (global best) and by the best position encountered by that particular particle (personal best). The movement of the particles is, therefore, determined by a combination of their velocity and acceleration, which are updated at each iteration based on the current global and individual best positions.
These algorithms have been implemented in Matlab
TM 2013 [
36] and applied to the cantilever beam case in the model updating phase of the identification strategy, i.e., in the minimization of the difference between the model eigenfrequencies (depending on
,
,
) and the experimental ones obtained by OMA. This difference represents the target function to the minimization of
, see Equation (3).
All the algorithms were set up to use the following variables’ initial variation ranges: 1 4 102 GPa for , 1 10−2 1 10−2 Nm for and 1 10−2 1 1020 N/m for .
The results of the optimization are shown in
Table 9 where the error function value
, the elastic modulus
Es, the flexural spring
, and the translational one
values are reported.
Looking at
Table 9, it is clear that the minimum value of the error function was reached by the SA algorithm, while similar values of the elastic modulus
and of translational spring
were obtained by the three algorithms. However, largest differences have been found in the values of flexural spring
.
Looking at these results, the last case study presented in
Section 3.4 was analyzed using the SA algorithm.




 ,
, 


















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}