
Theoretical and Numerical Studies of Elastic Buckling and Load Resistance of a Shuttle-Shaped Double-Restrained Buckling-Restrained Brace
Abstract
:1. Introduction
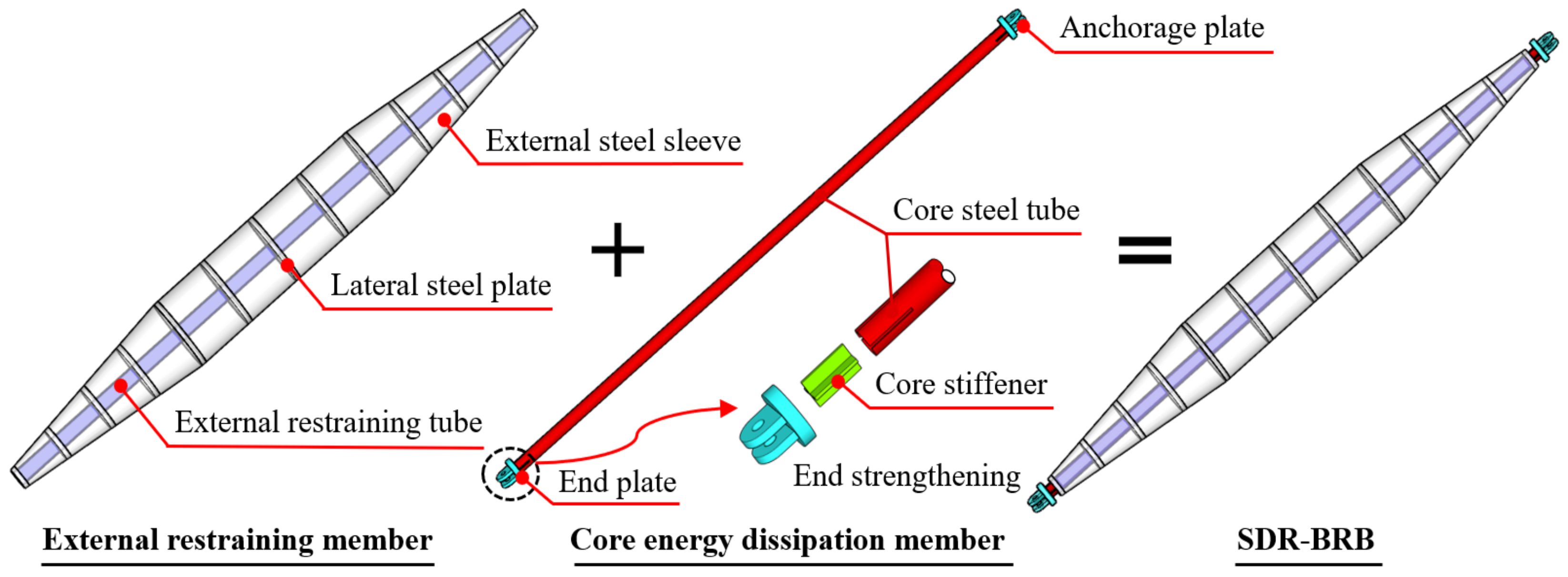
2. Shuttle-Shaped Double-Restrained Buckling-Restrained Brace
3. Elastic Buckling Behavior of an SDR-BRB
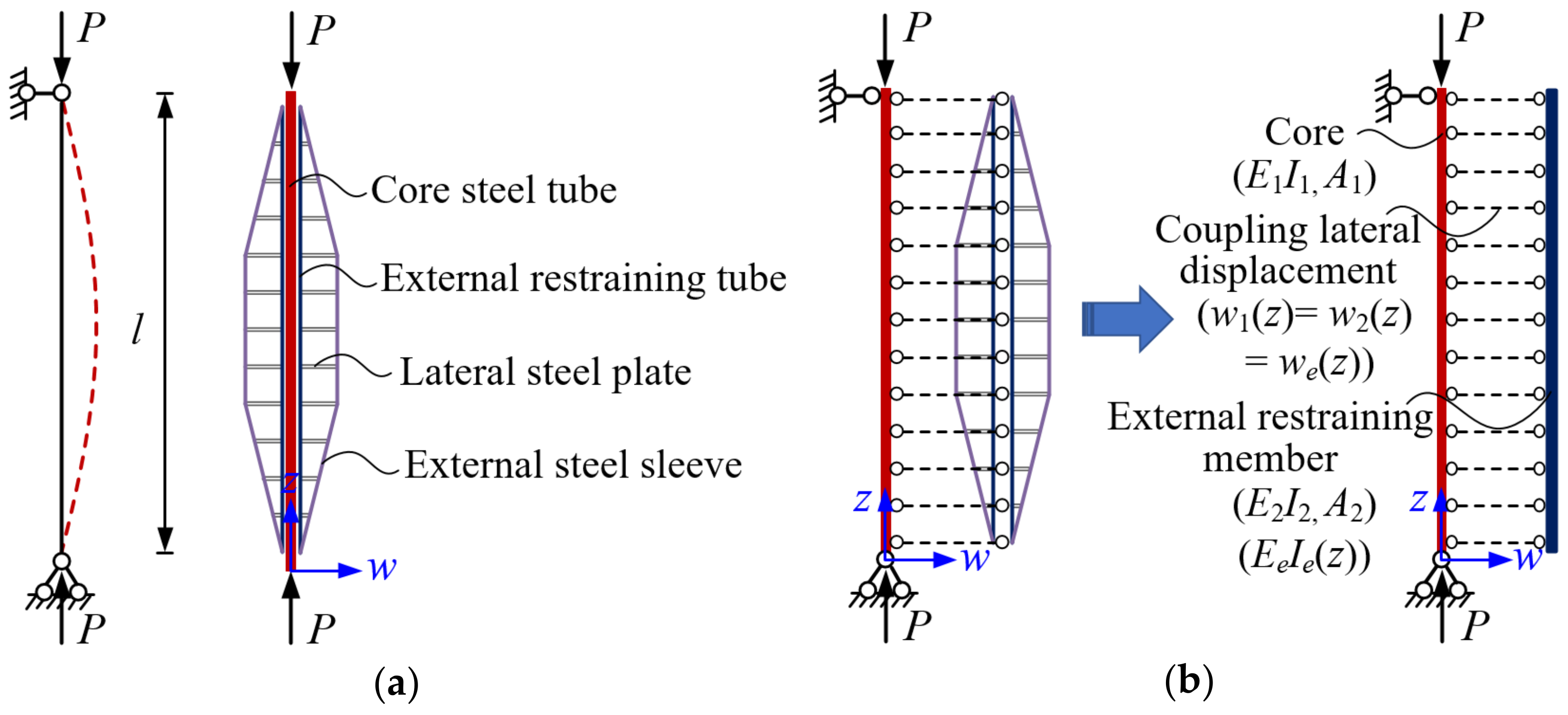
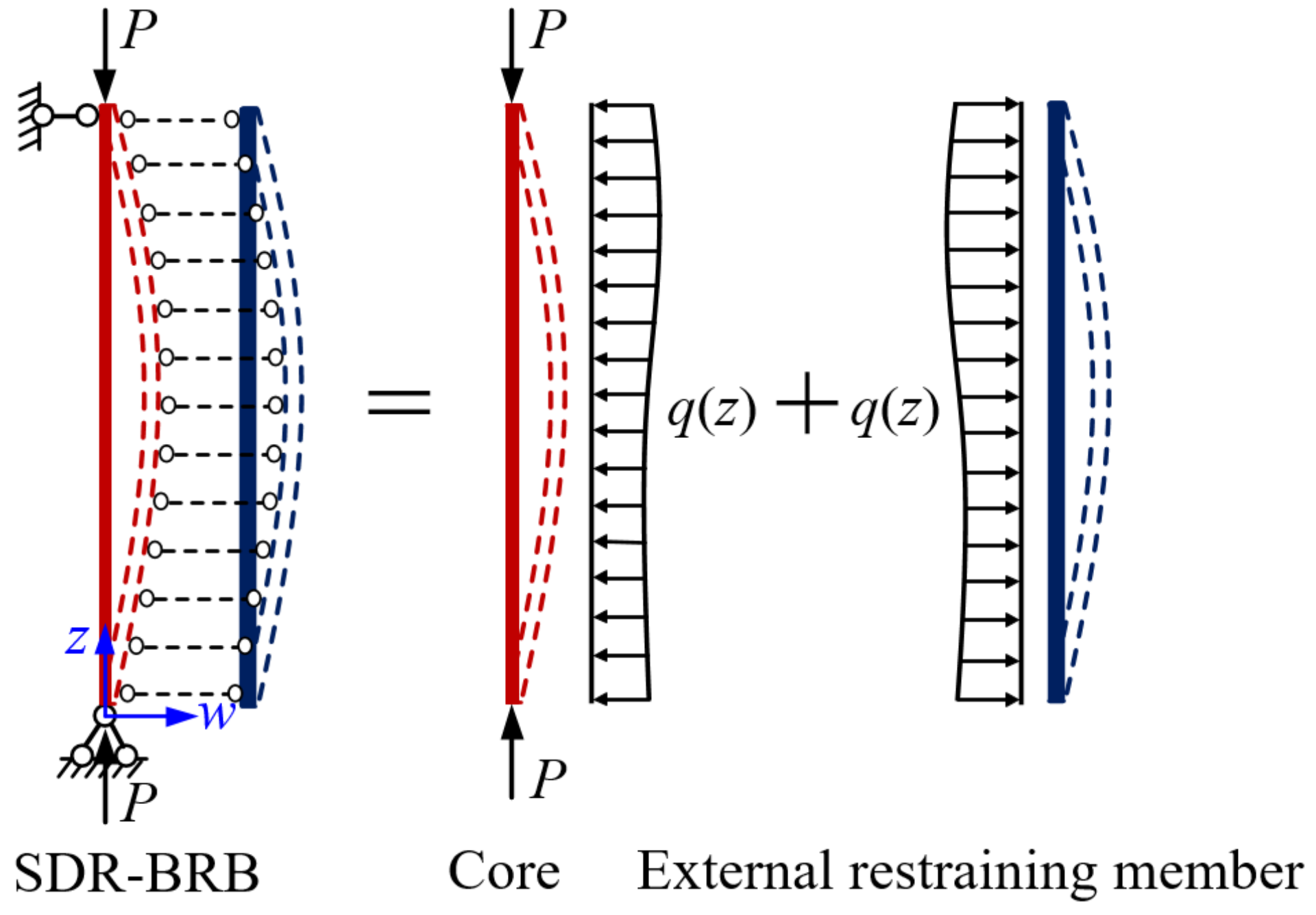
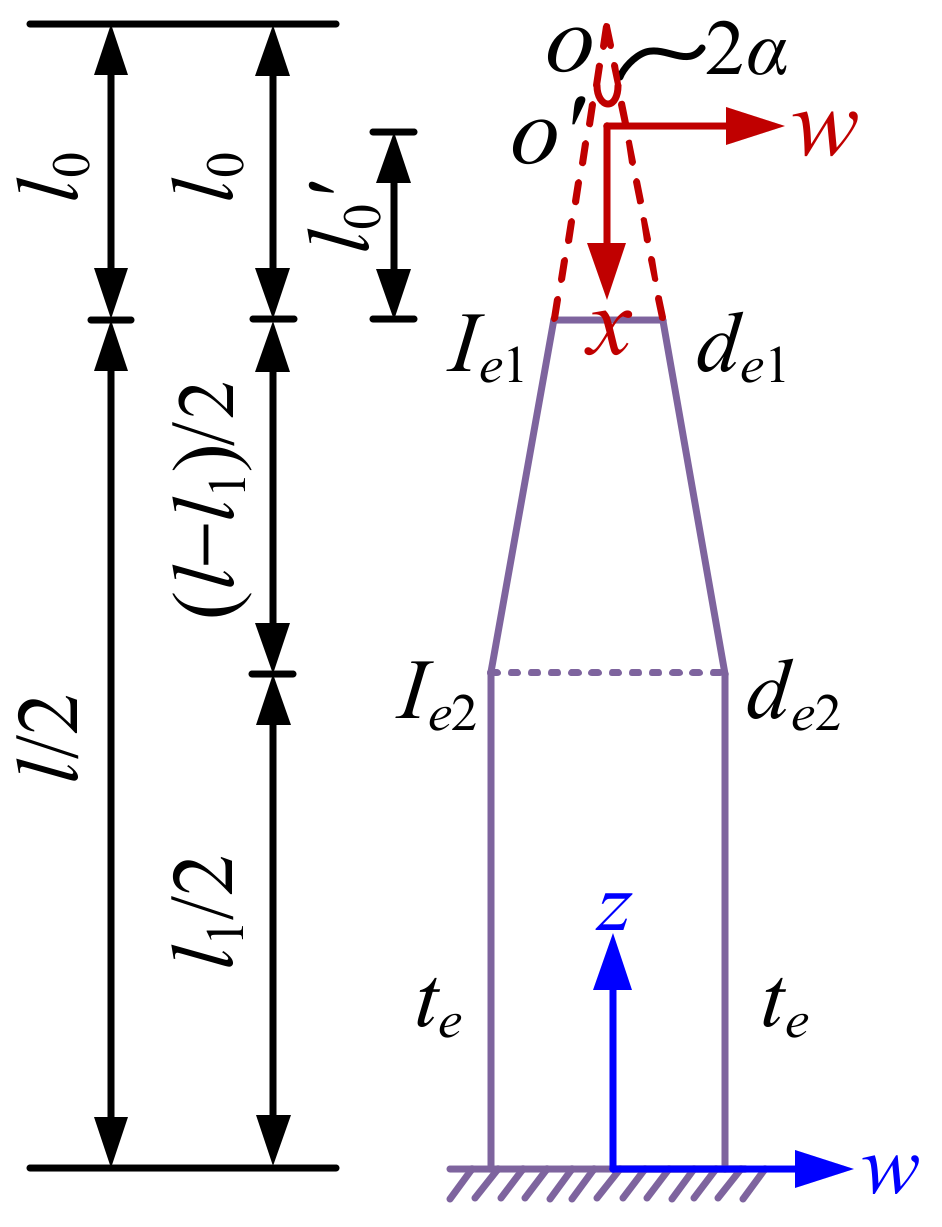
3.1. Simplified Model and Equilibrium Equation
3.2. Theoretical Solution for Elastic Buckling Load
3.3. Establishment and Verification of the Finite Element Model
4. Numerical Analysis of the Load-Carrying Capacity of an SDR-BRB
4.1. Effect of the Restraining Ratio
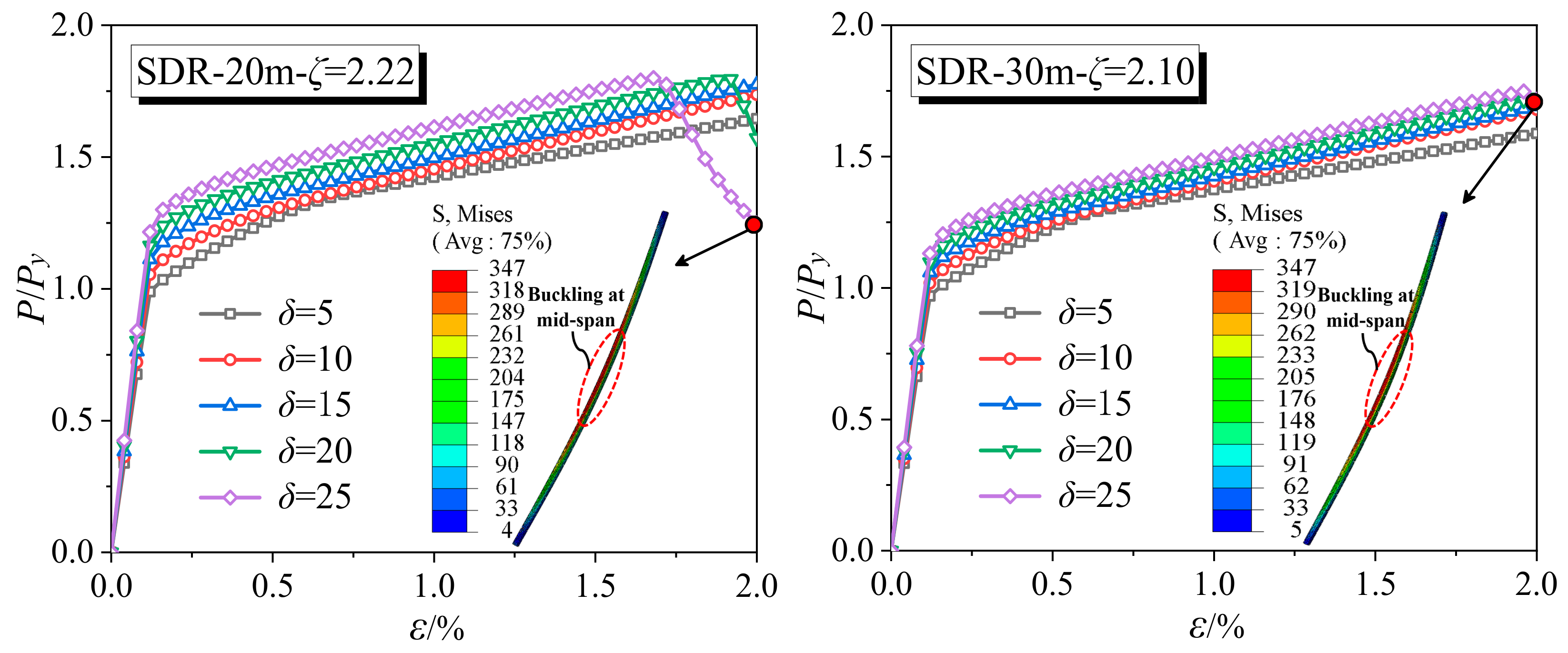
4.2. Effect of the Initial Imperfection
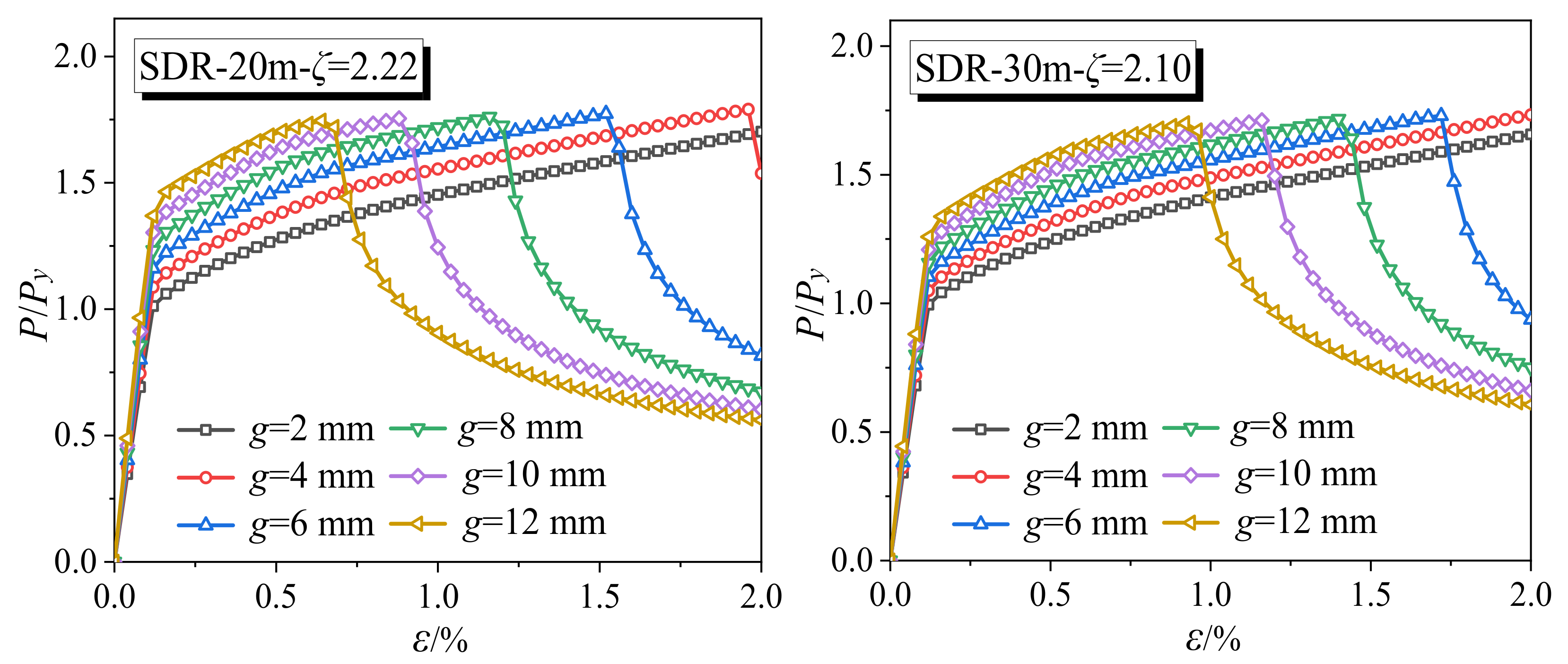
4.3. Effect of the Gap of the Core and the External Restraining Member
4.4. Effect of the Core Diameter–Thickness Ratio
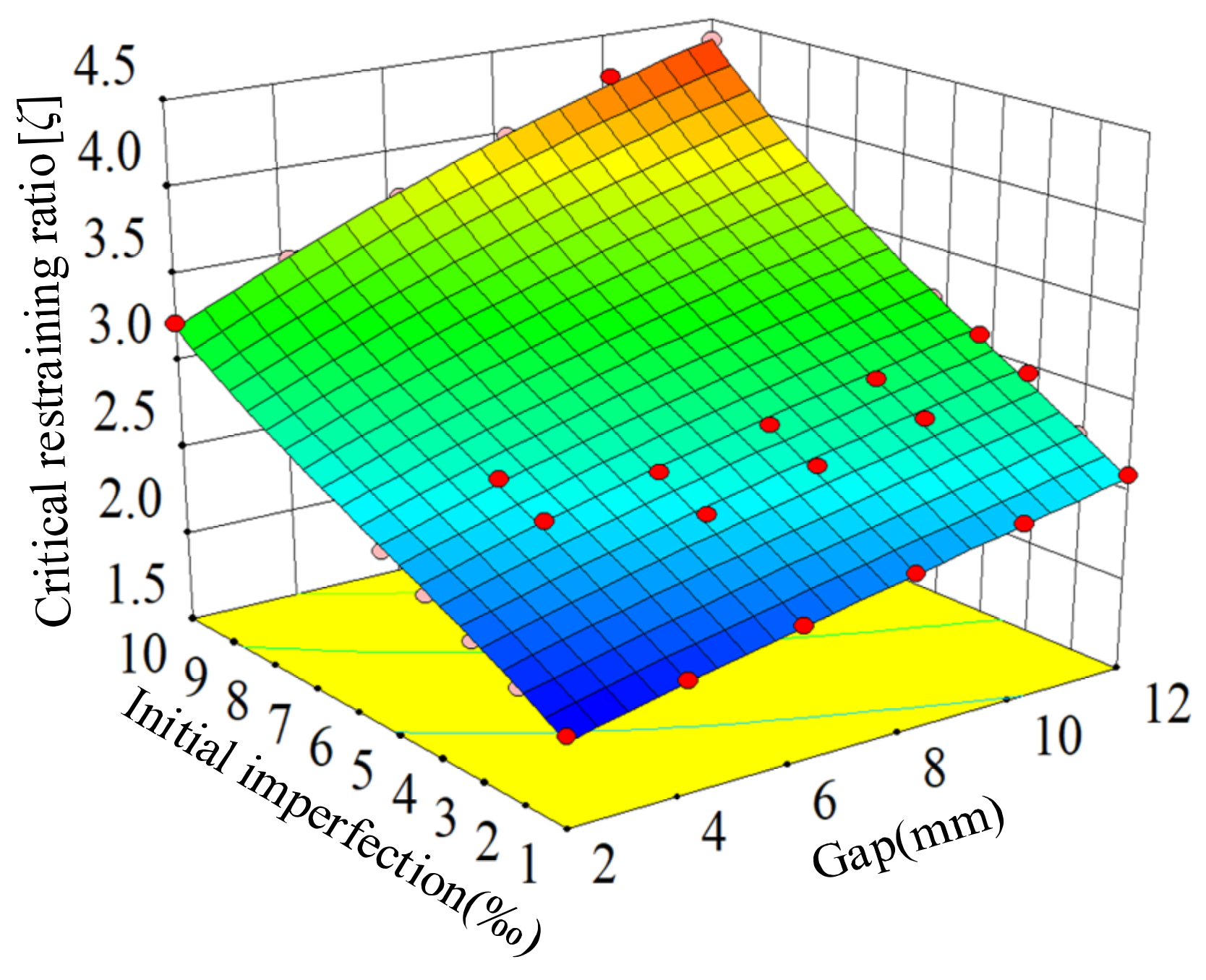
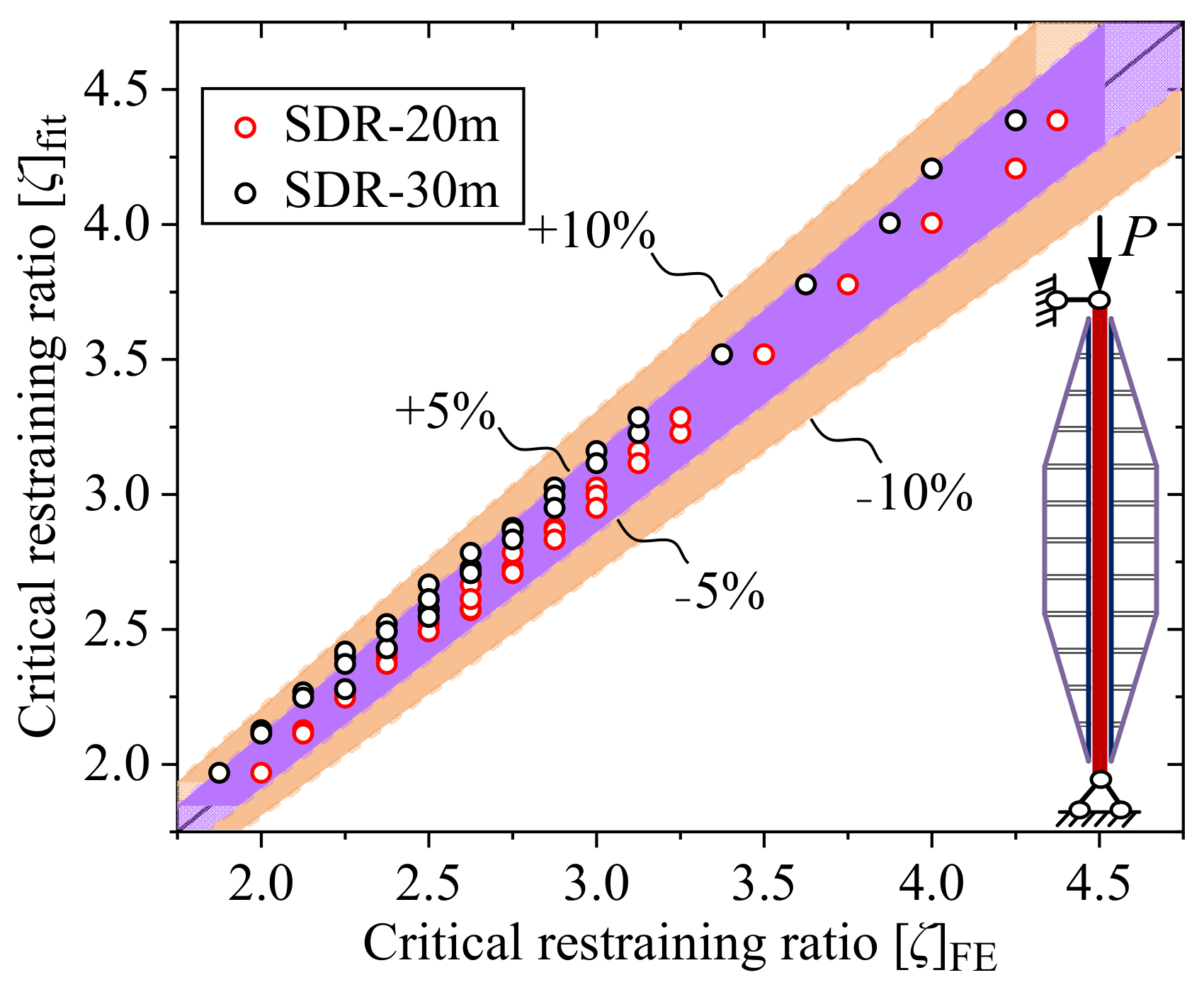
4.5. Determination of the Critical Restraining Ratio
5. Conclusions
- (1)
- Based on the equilibrium method, the formula for the elastic buckling load of the SDR-BRB is derived and verified by the eigenvalue buckling analysis method. The results show that the theoretical solution is in good agreement with the numerical solution, with discrepancies of less than 5%. As the geometric parameters of the external restraining member increase, the elastic buckling load of the SDR-BRB also increases, among which the tapering ratio γ has the greatest effect. To achieve the high load-carrying efficiency of the SDR-BRB in engineering applications, a larger tapering ratio γ should be preferred.
- (2)
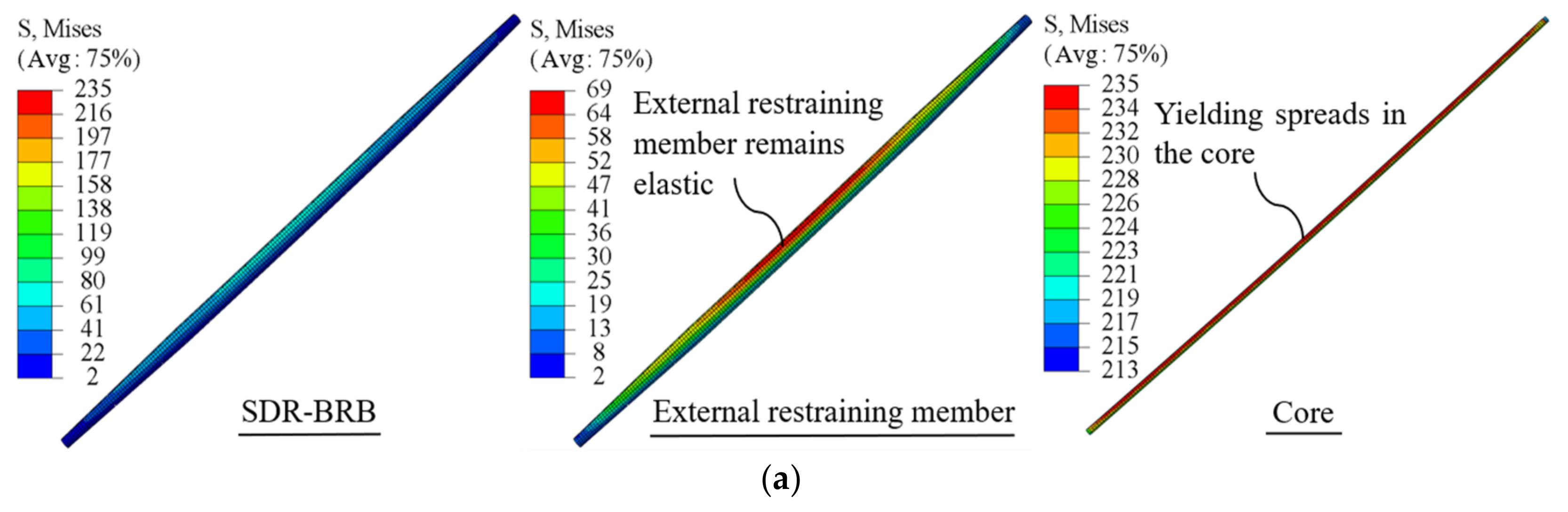
- The restraining ratio is an important affecting factor on the overall stability and failure mode of the SDR-BRB. When the restraining ratio is relatively small and the external restraint stiffness is insufficient, the SDR-BRB suffers from a single-wave symmetrical failure mode of midspan buckling instability. When the restraining ratio is relatively large, the SDR-BRB can not only meet the full-section yield of the core, but also have a certain plastic deformation and strengthening ability, allowing it to be considered as a load-carrying type of the BRB that meets the ductility requirements.
- (3)
- Parametric analysis shows that the initial imperfection and gap have significant effects on the ultimate load-carrying capacity and stability of the SDR-BRB. The larger the initial imperfection and gap, the faster the ultimate load-carrying capacity of SDR-BRB decreases, and the earlier the overall instability failure occurs. In addition, the excessive diameter–thickness ratio is also not conducive to the stable behavior of the SDR-BRB. To ensure that the SDR-BRB has a stable load-carrying capacity, it is recommended that the core diameter–thickness ratio should not exceed 25.
- (4)
- The fitting formula for the critical restraining ratio of SDR-BRB considering the influences of initial imperfection and gap is proposed. Compared with the finite element results, the calculation errors are less than 10%, which shows that the formula has good reliability and high accuracy and can provide a design reference for the practical application of this new type of BRB.
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Mirtaheri, M.; Sehat, S.; Nazeryan, M. Improving the Behavior of Buckling Restrained Braces through Obtaining Optimum Steel Core Length. Struct. Eng. Mech. 2018, 65, 401–408. [Google Scholar] [CrossRef]
- Sitler, B.; Takeuchi, T.; Matsui, R.; Terashima, M.; Terazawa, Y. Experimental Investigation of a Multistage Buckling-Restrained Brace. Eng. Struct. 2020, 213, 110482. [Google Scholar] [CrossRef]
- Bai, J.; Chen, H.; Ma, G.; Duan, L. Development of a Four-Tube-Assembled Buckling-Restrained Brace for Convenient Post-Earthquake Damage Examination and Replacement. J. Build. Eng. 2022, 50, 104209. [Google Scholar] [CrossRef]
- Zhou, Y.; Shao, H.; Lui, E.M.; Zhong, G.; Li, Z. Behavior of Elliptical Buckling-Restrained Braces under Cyclic Axial Load. Structures 2023, 48, 331–345. [Google Scholar] [CrossRef]
- Castaldo, P.; Tubaldi, E.; Selvi, F.; Gioiella, L. Seismic Performance of an Existing RC Structure Retrofitted with Buckling Restrained Braces. J. Build. Eng. 2021, 33, 101688. [Google Scholar] [CrossRef]
- Naghavi, M.; Rahnavard, R.; Thomas, R.J.; Malekinejad, M. Numerical Evaluation of the Hysteretic Behavior of Concentrically Braced Frames and Buckling Restrained Brace Frame Systems. J. Build. Eng. 2019, 22, 415–428. [Google Scholar] [CrossRef]
- Chou, C.-C.; Chen, S.-Y. Subassemblage Tests and Finite Element Analyses of Sandwiched Buckling-Restrained Braces. Eng. Struct. 2010, 32, 2108–2121. [Google Scholar] [CrossRef]
- Iwata, M.; Murai, M. Buckling-Restrained Brace Using Steel Mortar Planks; Performance Evaluation as a Hysteretic Damper. Earthq. Eng. Struct. Dyn. 2006, 35, 1807–1826. [Google Scholar] [CrossRef]
- Usami, T.; Wang, C.-L.; Funayama, J. Developing High-Performance Aluminum Alloy Buckling-Restrained Braces Based on Series of Low-Cycle Fatigue Tests. Earthq. Eng. Struct. Dyn. 2012, 41, 643–661. [Google Scholar] [CrossRef]
- Seker, O.; Akbas, B.; Seker, P.T.; Faytarouni, M.; Shen, J.; Mahamid, M. Three-Segment Steel Brace for Seismic Design of Concentrically Braced Frames. J. Constr. Steel Res. 2017, 137, 211–227. [Google Scholar] [CrossRef]
- Dehghani, M.; Tremblay, R. Design and Full-Scale Experimental Evaluation of a Seismically Endurant Steel Buckling-Restrained Brace System. Earthq. Eng. Struct. Dyn. 2018, 47, 105–129. [Google Scholar] [CrossRef]
- Zhao, J.; Wu, B.; Ou, J. A Novel Type of Angle Steel Buckling-Restrained Brace: Cyclic Behavior and Failure Mechanism. Earthq. Eng. Struct. Dyn. 2011, 40, 1083–1102. [Google Scholar] [CrossRef]
- Zhao, J.; Wu, B.; Ou, J. A Practical and Unified Global Stability Design Method of Buckling-Restrained Braces: Discussion on Pinned Connections. J. Constr. Steel Res. 2014, 95, 106–115. [Google Scholar] [CrossRef]
- Sun, J.; Pan, P.; Wang, H. Development and Experimental Validation of an Assembled Steel Double-Stage Yield Buckling Restrained Brace. J. Constr. Steel Res. 2018, 145, 330–340. [Google Scholar] [CrossRef]
- Wang, C.-L.; Qing, Y.; Wang, J.; Chen, G.; Zeng, B. A New Buckling-Restrained Brace with Gap-Supported Tendon Protection: Experiment and Application. Eng. Struct. 2019, 200, 109688. [Google Scholar] [CrossRef]
- Tremblay, R.; Bolduc, P.; Neville, R.; DeVall, R. Seismic Testing and Performance of Buckling-Restrained Bracing Systems. Can. J. Civ. Eng. 2006, 33, 183–198. [Google Scholar] [CrossRef]
- Genna, F.; Gelfi, P. Analysis of the Lateral Thrust in Bolted Steel Buckling-Restrained Braces. I: Experimental and Numerical Results. J. Struct. Eng. 2012, 138, 1231–1243. [Google Scholar] [CrossRef]
- Zhou, Y.; Gong, C.; Zhao, J.; Zhong, G.; Tian, S. Strong-Axis Stability and Seismic Performance of Perforated Core Plate Buckling-Restrained Braces. Thin-Walled Struct. 2020, 156, 106997. [Google Scholar] [CrossRef]
- Jia, L.-J.; Ge, H.; Xiang, P.; Liu, Y. Seismic Performance of Fish-Bone Shaped Buckling-Restrained Braces with Controlled Damage Process. Eng. Struct. 2018, 169, 141–153. [Google Scholar] [CrossRef]
- Zhu, B.-L.; Guo, Y.-L.; Zhou, P.; Bradford, M.A.; Pi, Y.-L. Numerical and Experimental Studies of Corrugated-Web-Connected Buckling-Restrained Braces. Eng. Struct. 2017, 134, 107–124. [Google Scholar] [CrossRef]
- Bai, J.; Chen, H.; Zhao, J.; Liu, M.; Jin, S. Seismic Design and Subassemblage Tests of Buckling-Restrained Braced RC Frames with Shear Connector Gusset Connections. Eng. Struct. 2021, 234, 112018. [Google Scholar] [CrossRef]
- Guo, Y.-L.; Zhu, J.-S.; Zhou, P.; Zhu, B.-L. A New Shuttle-Shaped Buckling-Restrained Brace. Theoretical Study on Buckling Behavior and Load Resistance. Eng. Struct. 2017, 147, 223–241. [Google Scholar] [CrossRef]
- Zhu, B.-L.; Guo, Y.-L.; Zhou, P.; Pi, Y.-L. Load-Carrying Performance and Design of BRBs Confined with Longitudinal Shuttle-Shaped-Trusses. J. Constr. Steel Res. 2020, 167, 105954. [Google Scholar] [CrossRef]
- Guo, Y.-L.; Zhou, P.; Wang, M.-Z.; Pi, Y.-L.; Bradford, M.A.; Tong, J.-Z. Experimental and Numerical Studies of Hysteretic Response of Triple-Truss-Confined Buckling-Restrained Braces. Eng. Struct. 2017, 148, 157–174. [Google Scholar] [CrossRef]
- Guo, Y.-L.; Fu, P.-P.; Zhou, P.; Tong, J.-Z. Elastic Buckling and Load Resistance of a Single Cross-Arm Pre-Tensioned Cable Stayed Buckling-Restrained Brace. Eng. Struct. 2016, 126, 516–530. [Google Scholar] [CrossRef]
- Xu, F.; Chen, J.; Shu, K.; Su, M. Cyclic Behaviour of Double-Tube Buckling-Restrained Braces for Boiler Steel Plant Structures. J. Constr. Steel Res. 2018, 150, 556–569. [Google Scholar] [CrossRef] [Green Version]
- Kiani, K. Nonlocal and Shear Effects on Column Buckling of Single-Layered Membranes from Stocky Single-Walled Carbon Nanotubes. Compos. Part B Eng. 2015, 79, 535–552. [Google Scholar] [CrossRef]
- Kiani, K. Column Buckling of Magnetically Affected Stocky Nanowires Carrying Electric Current. J. Phys. Chem. Solids 2015, 83, 140–151. [Google Scholar] [CrossRef]
- Li, S.; Zhang, J.; Zhao, Y. Thermal Post-Buckling of Functionally Graded Material Timoshenko Beams. Appl. Math. Mech. 2006, 27, 803–810. [Google Scholar] [CrossRef]
- Mu, B.; Kiani, K. Surface and Shear Effects on Spatial Buckling of Initially Twisted Nanowires. Eng. Anal. Bound. Elem. 2022, 143, 207–218. [Google Scholar] [CrossRef]
- Yas, M.H.; Samadi, N. Free Vibrations and Buckling Analysis of Carbon Nanotube-Reinforced Composite Timoshenko Beams on Elastic Foundation. Int. J. Press. Vessels Pip. 2012, 98, 119–128. [Google Scholar] [CrossRef]
- Timoshenko, S.; Gere, J. Theory of Elastic Stability; McGraw Hill: New York, NY, USA, 1961. [Google Scholar]
- Dongbin, Z.; Xin, N.; Peng, P.; Mengzi, W.; Kailai, D.; Yabin, C. Experimental Study and Finite Element Analysis of a Buckling-Restrained Brace Consisting of Three Steel Tubes with Slotted Holes in the Middle Tube. J. Constr. Steel Res. 2016, 124, 1–11. [Google Scholar] [CrossRef]
- Chen, B.; Xu, Q.; Zhu, B.; Yang, Y.; Li, Y. Buckling and Postbuckling Behaviors of Symmetric/Asymmetric Double-Beam Systems. Int. J. Mech. Sci. 2022, 235, 107712. [Google Scholar] [CrossRef]
- Kiani, K. Column Buckling of Doubly Parallel Slender Nanowires Carrying Electric Current Acted upon by a Magnetic Field. J. Phys. Chem. Solids 2016, 95, 89–97. [Google Scholar] [CrossRef]
- Kiani, K. Axial Buckling Analysis of Vertically Aligned Ensembles of Single-Walled Carbon Nanotubes Using Nonlocal Discrete and Continuous Models. Acta Mech. 2014, 225, 3569–3589. [Google Scholar] [CrossRef]
- Hoveidae, N.; Rafezy, B. Overall Buckling Behavior of All-Steel Buckling Restrained Braces. J. Constr. Steel Res. 2012, 79, 151–158. [Google Scholar] [CrossRef]
- Pan, W.-H.; Tong, J.-Z. A New Stiffness-Strength-Relationship-Based Design Approach for Global Buckling Prevention of Buckling-Restrained Braces. Adv. Struct. Eng. 2021, 24, 1343–1356. [Google Scholar] [CrossRef]
- Momenzadeh, S.; Seker, O.; Faytarouni, M.; Shen, J. Seismic Performance of All-Steel Buckling-Controlled Braces with Various Cross-Sections. J. Constr. Steel Res. 2017, 139, 44–61. [Google Scholar] [CrossRef]
- GB 50011-2016; Code for Seismic Design of Buildings. China Plan Press: Beijing, China, 2016; (In Chinese). [CrossRef]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| 0 | 0.2 | 0.4 | 0.6 | 0.8 | 1.0 | ||
| 0.1 | 1.1544 | 5.01 | 6.32 | 7.84 | 9.14 | 9.77 | π2 |
| 0.2 | 0.7100 | 6.14 | 7.31 | 8.49 | 9.39 | 9.81 | π2 |
| 0.4 | 0.3572 | 7.52 | 8.38 | 9.12 | 9.62 | 9.84 | π2 |
| 0.6 | 0.1856 | 8.50 | 9.02 | 9.46 | 9.74 | 9.85 | π2 |
| 0.8 | 0.0772 | 9.23 | 9.50 | 9.69 | 9.81 | 9.86 | π2 |
| 1.0 | 0 | π2 | π2 | π2 | π2 | π2 | π2 |
| No. | l | d1 × t1 | d2 × t2 | de1 | de2 | γ | l1 | λ | te | β |
|---|---|---|---|---|---|---|---|---|---|---|
| 1-1 | 10,000 | 120 × 20 | 140 × 8 | 200 | 200~600 | 0~2 | 5000 | 0.5 | 12 | 0.06 |
| 1-2 | 10,000 | 120 × 20 | 140 × 8 | 200 | 400 | 1 | 0~10,000 | 0~1 | 12 | 0.06 |
| 1-3 | 10,000 | 120 × 20 | 140 × 8 | 200 | 400 | 1 | 5000 | 0.5 | 4~24 | 0.02~0.12 |
| 2-1 | 20,000 | 200 × 30 | 240 × 18 | 350 | 350~1050 | 0~2 | 10,000 | 0.5 | 21 | 0.06 |
| 2-2 | 20,000 | 200 × 30 | 240 × 18 | 350 | 700 | 1 | 0~20,000 | 0~1 | 21 | 0.06 |
| 2-3 | 20,000 | 200 × 30 | 240 × 18 | 350 | 700 | 1 | 10,000 | 0.5 | 7~42 | 0.02~0.12 |
| 3-1 | 30,000 | 300 × 40 | 350 × 23 | 500 | 500~1500 | 0~2 | 15,000 | 0.5 | 30 | 0.06 |
| 3-2 | 30,000 | 300 × 40 | 350 × 23 | 500 | 1000 | 1 | 0~30,000 | 0~1 | 30 | 0.06 |
| 3-3 | 30,000 | 300 × 40 | 350 × 23 | 500 | 1000 | 1 | 15,000 | 0.5 | 10~60 | 0.02~0.12 |
| l | d1 × t1 | d2 × t2 | de1 | de2 | γ | l1 | λ | te | β | ζ |
|---|---|---|---|---|---|---|---|---|---|---|
| 20,000 | 200 × 30 | 240 × 18 | 350 | 525~625 | 0.50~0.78 | 10,000 | 0.5 | 21 | 0.06 | 1.39~2.22 |
| 30,000 | 300 × 40 | 350 × 23 | 500 | 760~900 | 0.52~0.80 | 15,000 | 0.5 | 30 | 0.06 | 1.31~2.10 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Shi, J.; Jin, S.; Xu, L.; Liu, Y.; Zhang, R. Theoretical and Numerical Studies of Elastic Buckling and Load Resistance of a Shuttle-Shaped Double-Restrained Buckling-Restrained Brace. Buildings 2023, 13, 1967. https://doi.org/10.3390/buildings13081967
Shi J, Jin S, Xu L, Liu Y, Zhang R. Theoretical and Numerical Studies of Elastic Buckling and Load Resistance of a Shuttle-Shaped Double-Restrained Buckling-Restrained Brace. Buildings. 2023; 13(8):1967. https://doi.org/10.3390/buildings13081967
Chicago/Turabian StyleShi, Jun, Shuangshuang Jin, Lueqin Xu, Yangqing Liu, and Ruijie Zhang. 2023. "Theoretical and Numerical Studies of Elastic Buckling and Load Resistance of a Shuttle-Shaped Double-Restrained Buckling-Restrained Brace" Buildings 13, no. 8: 1967. https://doi.org/10.3390/buildings13081967