




Multi-Sensor-Based Occupancy Prediction in a Multi-Zone Office Building with Transformer

Abstract
1. Introduction
- We introduce OPTnet, a Transformer-based multi-sensor building occupancy prediction network to learn an effective fused representation.
- We process two-week real operating sensor data from a multi-zone office building to predict accurate occupancy, including building occupancy, indoor environmental conditions, and HVAC operations.
- Through experimental analysis and comparison, we found that the OPTnet method outperformed existing algorithms (e.g., decision tree (DT), long short-term memory networks (LSTM), multi-layer perceptron (MLP)).
- Considering long or short occupancy prediction applications, we provide a comprehensive analysis and comparison of diverse time horizons to highlight the importance of choosing the suitable time horizon.
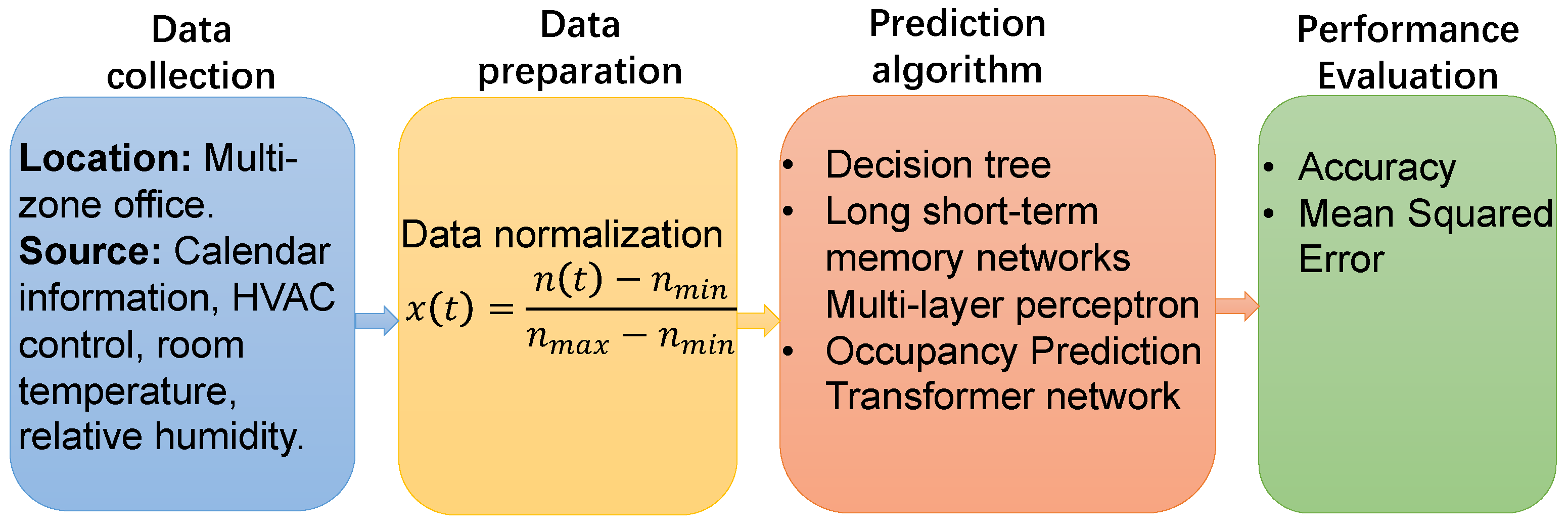
2. Methods
2.1. Data Collection
2.2. Data Preparation
2.3. Algorithms
2.3.1. Decision Tree
2.3.2. Long Short-Term Memory Networks
2.3.3. Multi-Layer Perceptron
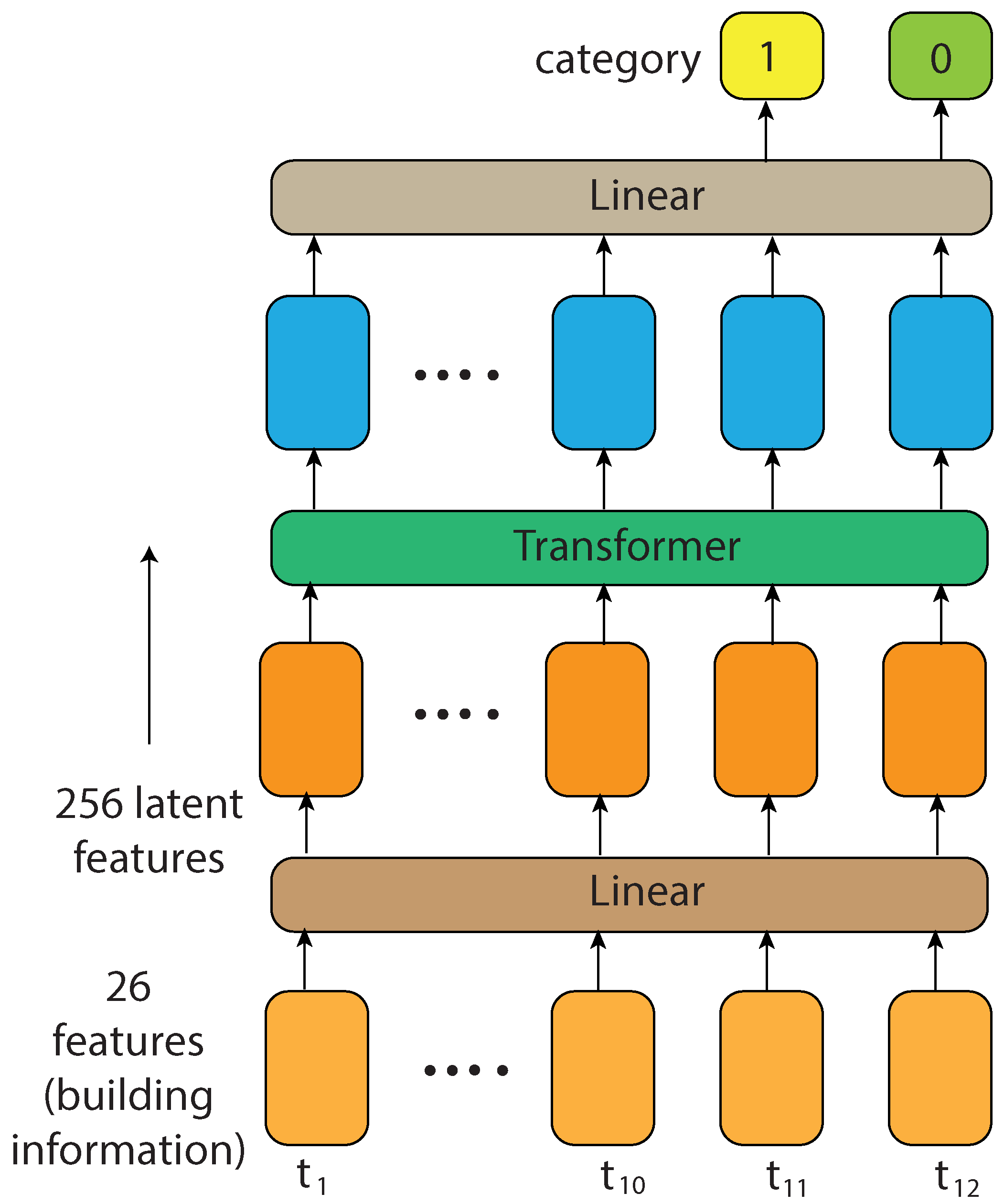
2.3.4. Occupancy Prediction Transformer Network
2.4. Performance Evaluation
3. Experiments
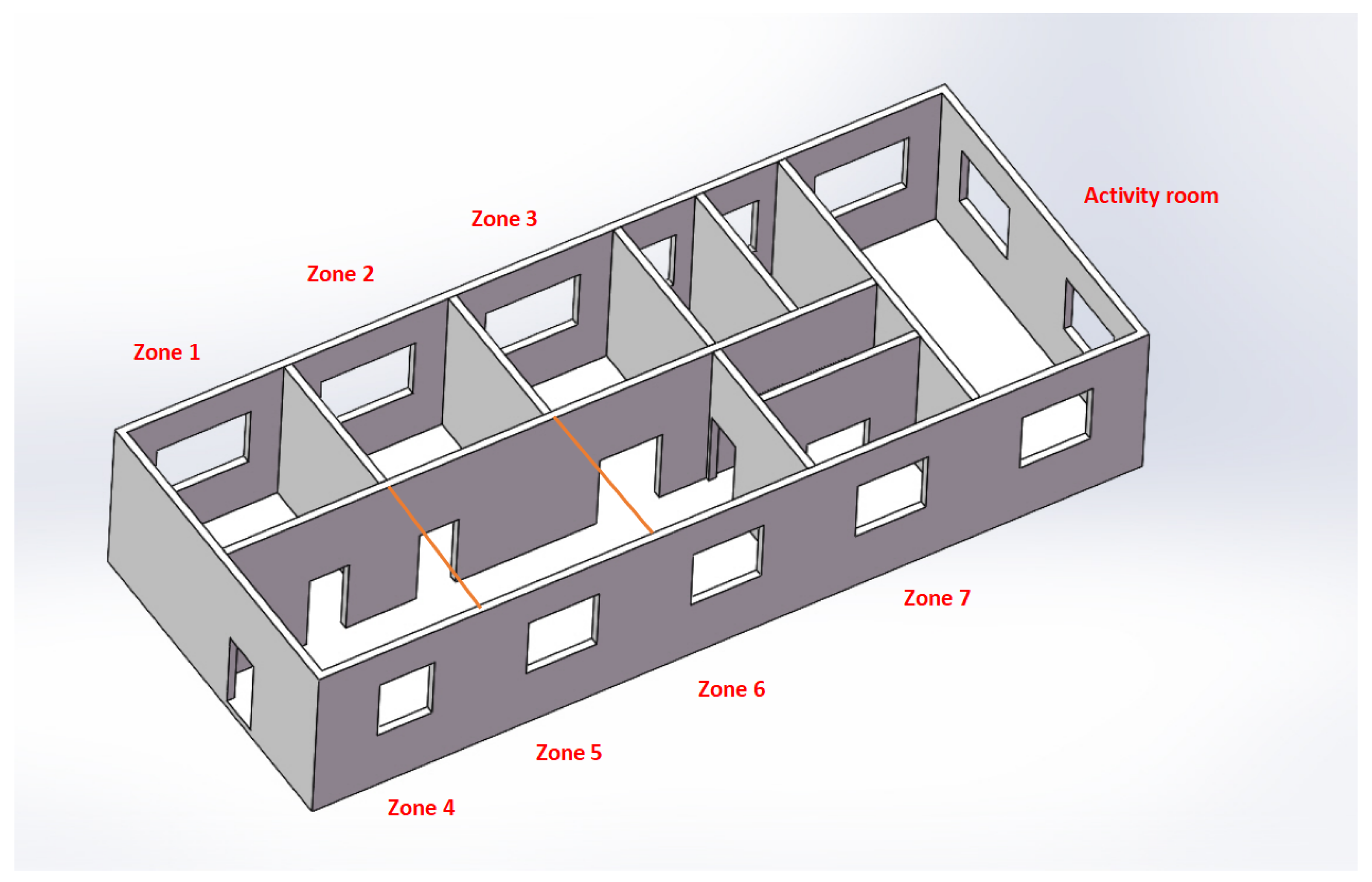
3.1. Experimental Environment
3.2. Experimental Data
- The calendar information: We collected the sensor data from 9:00 to 19:00 during the five working days (from Monday to Friday) and weekends (Saturday and Sunday).
- The occupancy information: We captured videos from our cameras. Then, we analyzed and estimated occupancy presence (1 or 0) in each room using advanced artificial intelligence technologies. The time resolution was 1 min. The duty ratios of occupancy in multi-zones are shown in Table 1. The duty ratios are various, indicating that the practical dataset is diverse and complete.
- The indoor environment information: We collected the indoor temperature and relative humidity data, directly affecting the occupants’ thermal comfort. The temperature and relative humidity data can be used to predict future occupancy.
- The HVAC control information: The HVAC system employs FCUs for control. The control signs (FCU temperature feedback, FCU control mode, FCU on/off feedback, and FCU fan feedback) are considered for occupancy prediction.
3.3. Experimental Parameters
- The Adam optimizer trained the LSTM and OPTnet model for 20 epochs.
- The learning rate was .
- The batch size was 4.
- The numbers of LSTM and TOPTnet layers were 6.
- The number of fully connected layers was 5.
- The dropout of the last layer was 0.5.
- MSE loss function.
4. Results and Discussion
4.1. OPTnet vs. (LSTM, MLP, DT)
- Occupancy patterns in buildings can exhibit long-range dependencies, where the presence or absence of occupants in one area can impact occupancy in other areas. The self-attention mechanism in the OPTnet allows it to capture such long-range dependencies effectively. In contrast, DT, LSTM, and MLP struggle to model these dependencies explicitly.
- Occupancy patterns often have temporal dynamics, where the presence or absence of occupants at one time influences future occupancy. The OPTnet, with its self-attention mechanism, can capture these temporal dynamics by attending to relevant past occupancy information at each time step. On the other hand, DT typically considers each time step independently, LSTM focuses on short-term dependencies, and MLP lacks inherent mechanisms for capturing temporal dynamics.
- OPTnet can use parallel computation, making it highly scalable and efficient, especially when dealing with large datasets. This scalability allows the Transformer model to handle complex occupancy prediction tasks efficiently. In comparison, DT, LSTM, and MLP may need to improve scalability and computational efficiency, mainly when dealing with longer sequences or large datasets.
- OPTnet has shown robustness to noisy data due to its ability to attend to relevant information and suppress noise during the attention mechanism. This robustness can benefit occupancy prediction tasks, where the data may contain missing or noisy observations. DT, LSTM, and MLP are more sensitive to noisy data and require additional preprocessing or regularization techniques to handle such scenarios.
4.2. Time Horizons vs. Performance
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Bazazzadeh, H.; Pilechiha, P.; Nadolny, A.; Mahdavinejad, M.; Hashemi Safaei, S.S. The impact assessment of climate change on building energy consumption in Poland. Energies 2021, 14, 4084. [Google Scholar] [CrossRef]
- Kavari, G.; Tahani, M.; Mirhosseini, M. Wind shear effect on aerodynamic performance and energy production of horizontal axis wind turbines with developing blade element momentum theory. J. Clean. Prod. 2019, 219, 368–376. [Google Scholar] [CrossRef]
- Kabbaj, O.A.; Péan, L.M.; Masson, J.B.; Marhic, B.; Delahoche, L. Occupancy states forecasting with a hidden Markov model for incomplete data, exploiting daily periodicity. Energy Build. 2023, 287, 112985. [Google Scholar] [CrossRef]
- Li, Z.; Wang, P.; Zhang, J.; Mu, S. A strategy of improving indoor air temperature prediction in HVAC system based on multivariate transfer entropy. Build. Environ. 2022, 219, 109164. [Google Scholar] [CrossRef]
- Idahosa, L.O.; Akotey, J.O. A social constructionist approach to managing HVAC energy consumption using social norms–A randomised field experiment. Energy Policy 2021, 154, 112293. [Google Scholar] [CrossRef]
- Jung, S.; Jeoung, J.; Hong, T. Occupant-centered real-time control of indoor temperature using deep learning algorithms. Build. Environ. 2022, 208, 108633. [Google Scholar] [CrossRef]
- Xing, T.; Sun, K.; Zhao, Q. MITP-Net: A deep-learning framework for short-term indoor temperature predictions in multi-zone buildings. Build. Environ. 2023, 239, 110388. [Google Scholar] [CrossRef]
- Barreca, F.; Praticò, P. Environmental indoor thermal control of extra virgin olive oil storage room with phase change materials. J. Agric. Eng. 2019, 50, 208–214. [Google Scholar] [CrossRef]
- Li, W.; Zhang, J.; Zhao, T.; Ren, J. Experimental study of an indoor temperature fuzzy control method for thermal comfort and energy saving using wristband device. Build. Environ. 2021, 187, 107432. [Google Scholar] [CrossRef]
- Che, W.W.; Tso, C.Y.; Sun, L.; Ip, D.Y.; Lee, H.; Chao, C.Y.; Lau, A.K. Energy consumption, indoor thermal comfort and air quality in a commercial office with retrofitted heat, ventilation and air conditioning (HVAC) system. Energy Build. 2019, 201, 202–215. [Google Scholar] [CrossRef]
- Sun, Y.; Kojima, S.; Nakaohkubo, K.; Zhao, J.; Ni, S. Analysis and Evaluation of Indoor Environment, Occupant Satisfaction, and Energy Consumption in General Hospital in China. Buildings 2023, 13, 1675. [Google Scholar] [CrossRef]
- Barreca, F.; Praticò, P. Post-Occupancy Evaluation of Buildings for Sustainable Agri-Food Production—A Method Applied to an Olive Oil Mill. Buildings 2018, 8, 83. [Google Scholar] [CrossRef]
- Barreca, F.; Cardinali, G.D. Agri-food building performance evaluation by an integration of different measurement techniques: Case study of a bakery in south Italy. Build. Environ. 2021, 204, 108109. [Google Scholar] [CrossRef]
- Qaisar, I.; Zhao, Q. Energy baseline prediction for buildings: A review. Results Control Optim. 2022, 7, 100129. [Google Scholar] [CrossRef]
- Yan, D.; Hong, T.; Dong, B.; Mahdavi, A.; D’Oca, S.; Gaetani, I.; Feng, X. IEA EBC Annex 66: Definition and simulation of occupant behavior in buildings. Energy Build. 2017, 156, 258–270. [Google Scholar] [CrossRef]
- Park, J.Y.; Ouf, M.M.; Gunay, B.; Peng, Y.; O’Brien, W.; Kjærgaard, M.B.; Nagy, Z. A critical review of field implementations of occupant-centric building controls. Build. Environ. 2019, 165, 106351. [Google Scholar] [CrossRef]
- Dai, X.; Liu, J.; Zhang, X. A review of studies applying machine learning models to predict occupancy and window-opening behaviours in smart buildings. Energy Build. 2020, 223, 110159. [Google Scholar] [CrossRef]
- Wang, W.; Wang, J.; Chen, J.; Huang, G.; Guo, X. Multi-zone outdoor air coordination through Wi-Fi probe-based occupancy sensing. Energy Build. 2018, 159, 495–507. [Google Scholar] [CrossRef]
- Wang, C.; Pattawi, K.; Lee, H. Energy saving impact of occupancy-driven thermostat for residential buildings. Energy Build. 2020, 211, 109791. [Google Scholar] [CrossRef]
- Jin, Y.; Yan, D.; Chong, A.; Dong, B.; An, J. Building occupancy forecasting: A systematical and critical review. Energy Build. 2021, 251, 111345. [Google Scholar] [CrossRef]
- Sun, K.; Ma, X.; Liu, P.; Zhao, Q. MPSN: Motion-aware Pseudo-Siamese Network for indoor video head detection in buildings. Build. Environ. 2022, 222, 109354. [Google Scholar] [CrossRef]
- Choi, H.; Um, C.Y.; Kang, K.; Kim, H.; Kim, T. Review of vision-based occupant information sensing systems for occupant-centric control. Build. Environ. 2021, 203, 108064. [Google Scholar] [CrossRef]
- Esrafilian-Najafabadi, M.; Haghighat, F. Impact of occupancy prediction models on building HVAC control system performance: Application of machine learning techniques. Energy Build. 2022, 257, 111808. [Google Scholar] [CrossRef]
- Esrafilian-Najafabadi, M.; Haghighat, F. Impact of predictor variables on the performance of future occupancy prediction: Feature selection using genetic algorithms and machine learning. Build. Environ. 2022, 219, 109152. [Google Scholar] [CrossRef]
- Sun, K.; Zhao, Q.; Zou, J. A review of building occupancy measurement systems. Energy Build. 2020, 216, 109965. [Google Scholar] [CrossRef]
- Candanedo, L.M.; Feldheim, V.; Deramaix, D. A methodology based on Hidden Markov Models for occupancy detection and a case study in a low energy residential building. Energy Build. 2017, 148, 327–341. [Google Scholar] [CrossRef]
- Gunay, H.B.; O’Brien, W.; Beausoleil-Morrison, I. Development of an occupancy learning algorithm for terminal heating and cooling units. Build. Environ. 2015, 93, 71–85. [Google Scholar] [CrossRef]
- Sun, Y.; Hao, W.; Chen, Y.; Liu, B. Data-driven occupant-behavior analytics for residential buildings. Energy 2020, 206, 118100. [Google Scholar] [CrossRef]
- Jiefan, G.; Peng, X.; Zhihong, P.; Yongbao, C.; Ying, J.; Zhe, C. Extracting typical occupancy data of different buildings from mobile positioning data. Energy Build. 2018, 180, 135–145. [Google Scholar] [CrossRef]
- Razavi, R.; Gharipour, A.; Fleury, M.; Akpan, I.J. Occupancy detection of residential buildings using smart meter data: A large-scale study. Energy Build. 2019, 183, 195–208. [Google Scholar] [CrossRef]
- Jain, R.K.; Smith, K.M.; Culligan, P.J.; Taylor, J.E. Forecasting energy consumption of multi-family residential buildings using support vector regression: Investigating the impact of temporal and spatial monitoring granularity on performance accuracy. Appl. Energy 2014, 123, 168–178. [Google Scholar] [CrossRef]
- D’Oca, S.; Hong, T. Occupancy schedules learning process through a data mining framework. Energy Build. 2015, 88, 395–408. [Google Scholar] [CrossRef]
- Chen, Y.T.; Piedad, E., Jr.; Kuo, C.C. Energy consumption load forecasting using a level-based random forest classifier. Symmetry 2019, 11, 956. [Google Scholar] [CrossRef]
- Benezeth, Y.; Laurent, H.; Emile, B.; Rosenberger, C. Towards a sensor for detecting human presence and characterizing activity. Energy Build. 2011, 43, 305–314. [Google Scholar] [CrossRef]
- Yang, J.; Santamouris, M.; Lee, S.E. Review of occupancy sensing systems and occupancy modeling methodologies for the application in institutional buildings. Energy Build. 2016, 121, 344–349. [Google Scholar] [CrossRef]
- Wang, W.; Chen, J.; Song, X. Modeling and predicting occupancy profile in office space with a Wi-Fi probe-based Dynamic Markov Time-Window Inference approach. Build. Environ. 2017, 124, 130–142. [Google Scholar] [CrossRef]
- Xing, T.; Yan, H.; Sun, K.; Wang, Y.; Wang, X.; Zhao, Q. Honeycomb: An open-source distributed system for smart buildings. Patterns 2022, 3, 100605. [Google Scholar] [CrossRef]
- Hochreiter, S.; Schmidhuber, J. Long short-term memory. Neural Comput. 1997, 9, 1735–1780. [Google Scholar] [CrossRef]
- Amadou Boukary, N. A Comparison of Time Series Forecasting Learning Algorithms on the Task of Predicting Event Timing. Master’s Thesis, Royal Military College of Canada, Kingston, ON, Canada, 2016. [Google Scholar]
- Noriega, L. Multilayer perceptron tutorial. Sch. Comput. Staff. Univ. 2005, 4, 5. [Google Scholar]
- Reed, R.; Marks, R.J., II. Neural Smithing: Supervised Learning in Feedforward Artificial Neural Networks; MIT Press: Cambridge, MA, USA, 1999. [Google Scholar]




{kind=link}
{kind=link}
{kind=link}
| Weeks | Zone 1 | Zone 2 | Zone 4 | Zone 5 | Zone 6 | Zone 7 |
|---|---|---|---|---|---|---|
| Week 1 | 0.314 | 0.504 | 0.919 | 0.405 | 0.898 | 0.611 |
| Week 2 | 0.084 | 0.854 | 0.816 | 0.353 | 0.898 | 0.256 |
| Time Horizon | Week-1 | Week-2 | ||||||
|---|---|---|---|---|---|---|---|---|
| Zone 1 | ||||||||
| DT | LSTM | MLP | OPTnet | DT | LSTM | MLP | OPTnet | |
| 1 min | 0.951 | 0.967 | ||||||
| 2 min | ||||||||
| 5 min | ||||||||
| 10 min | ||||||||
| 20 min | ||||||||
| 30 min | ||||||||
| Zone 2 | ||||||||
| 1 min | ||||||||
| 2 min | ||||||||
| 5 min | ||||||||
| 10 min | ||||||||
| 20 min | ||||||||
| 30 min | ||||||||
| Zone 4 | ||||||||
| 1 min | ||||||||
| 2 min | ||||||||
| 5 min | ||||||||
| 10 min | ||||||||
| 20 min | ||||||||
| 30 min | ||||||||
| Zone 5 | ||||||||
| 1 min | ||||||||
| 2 min | ||||||||
| 5 min | ||||||||
| 10 min | ||||||||
| 20 min | ||||||||
| 30 min | ||||||||
| Zone 6 | ||||||||
| 1 min | ||||||||
| 2 min | ||||||||
| 5 min | ||||||||
| 10 min | ||||||||
| 20 min | ||||||||
| 30 min | ||||||||
| Zone 7 | ||||||||
| 1 min | ||||||||
| 2 min | ||||||||
| 5 min | ||||||||
| 10 min | ||||||||
| 20 min | ||||||||
| 30 min |
| Time Horizon | Week-1 | Week-2 | ||||||
|---|---|---|---|---|---|---|---|---|
| Zone 1 | ||||||||
| DT | LSTM | MLP | OPTnet | DT | LSTM | MLP | OPTnet | |
| 1 min | 0.049 | |||||||
| 2 min | ||||||||
| 5 min | ||||||||
| 10 min | ||||||||
| 20 min | ||||||||
| 30 min | ||||||||
| Zone 2 | ||||||||
| 1 min | ||||||||
| 2 min | ||||||||
| 5 min | ||||||||
| 10 min | ||||||||
| 20 min | ||||||||
| 30 min | ||||||||
| Zone 4 | ||||||||
| 1 min | ||||||||
| 2 min | ||||||||
| 5 min | ||||||||
| 10 min | ||||||||
| 20 min | ||||||||
| 30 min | ||||||||
| Zone 5 | ||||||||
| 1 min | ||||||||
| 2 min | ||||||||
| 5 min | ||||||||
| 10 min | ||||||||
| 20 min | ||||||||
| 30 min | ||||||||
| Zone 6 | ||||||||
| 1 min | ||||||||
| 2 min | ||||||||
| 5 min | ||||||||
| 10 min | ||||||||
| 20 min | ||||||||
| 30 min | ||||||||
| Zone 7 | ||||||||
| 1 min | ||||||||
| 2 min | ||||||||
| 5 min | ||||||||
| 10 min | ||||||||
| 20 min | ||||||||
| 30 min |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Qaisar, I.; Sun, K.; Zhao, Q.; Xing, T.; Yan, H. Multi-Sensor-Based Occupancy Prediction in a Multi-Zone Office Building with Transformer. Buildings 2023, 13, 2002. https://doi.org/10.3390/buildings13082002
Qaisar I, Sun K, Zhao Q, Xing T, Yan H. Multi-Sensor-Based Occupancy Prediction in a Multi-Zone Office Building with Transformer. Buildings. 2023; 13(8):2002. https://doi.org/10.3390/buildings13082002
Chicago/Turabian StyleQaisar, Irfan, Kailai Sun, Qianchuan Zhao, Tian Xing, and Hu Yan. 2023. "Multi-Sensor-Based Occupancy Prediction in a Multi-Zone Office Building with Transformer" Buildings 13, no. 8: 2002. https://doi.org/10.3390/buildings13082002
APA StyleQaisar, I., Sun, K., Zhao, Q., Xing, T., & Yan, H. (2023). Multi-Sensor-Based Occupancy Prediction in a Multi-Zone Office Building with Transformer. Buildings, 13(8), 2002. https://doi.org/10.3390/buildings13082002