1. Introduction
Long-span, concrete-filled, steel tube arch bridges usually use the cable-hoisting method to erect the arch ribs [
1]. In the process of the cantilever assembly of arch ribs, with the tension of the segmental cable force, the number of structural static indeterminate increases gradually, the system changes constantly, and the construction control is difficult [
2]. The cable tension is the only way to adjust the alignment of the bridge. The cable force has a great influence on the alignment of the arch. Therefore, how to determine the reasonable cable force is a key problem in the construction of the arch bridge [
3,
4].
To calculate the cable force of a concrete-filled steel tube arch bridge, many experts have conducted a lot of research on it [
5,
6]. To avoid the tedious work of repeated cable adjustment in construction, Zhang Zhicheng et al. [
7] used the ANSYS optimization module and life and death unit function optimization to obtain the best cable force. Liu Shaoping [
8] calculated the one-time cable tensioning method and pre-lifting amount of the Daning River Bridge based on the cable tension method and the zero-order optimization method. Zhou Yin et al. [
9] introduced the arch-forming control method based on the precise control of unstressed parameters and constructed the arch-forming calculation theory method of a steel tube coagulation arch bridge. Gu Ying et al. proposed the linear control principle of “high rather than low, quiet rather than moving” and a new calculation method for cable force, which solved the problem of large cable force deviation and difficult linear adjustments in the process of arch rib erection [
10]. In summary, the cable force of the tension cable is very important to the later state of the bridge structure when the arch rib of the concrete-filled steel tube arch bridge is assembled. Although many scholars are committed to the study of the calculation of the cable force of the steel tube arch rib in cable hoisting construction, there are few references for the calculation of the cable force of a long-span bridge (such as the 410 m span of this paper). Therefore, this paper takes the calculation of the arch rib cable force of a long-span, concrete-filled steel tube arch bridge as an example to enrich the literature in this field.
Based on the actual project, this paper controls the arch bridge alignment based on the principle of “quiet do not move” and uses the forward iteration method to calculate the tensioned cable force when the arch rib of the arch bridge is assembled to obtain the ideal cable force value through calculation and guide the bridge construction process. This is performed so that the smoothness of the arch bridge after closure meets the requirements, providing a reference for the same type of project.
2. Calculation of Arch Rib Cable Force
When the cantilever tangent assembly method is used to assemble the arch rib segment, the arch rib can obtain the corresponding installation line shape after tensioning the appropriate cable force so that the arch rib can reach or approach the ideal bare arch line shape after closing and removing the buckle cable. However, with the continuous assembly of the arch rib, the angle between the buckle and the arch rib is constantly changing, so the tension of the buckle cable force also changes. The magnitude of the cable force will directly affect the safety of the arch rib assembly process and the accuracy of the assembly condition prediction. Therefore, determining a reasonable cable force is the key to ensuring the calculation accuracy and smooth closure of the arch bridge [
11]. The traditional mechanical methods in the calculation of the cable force mainly include: the methods of moment balance, zero displacement method [
12], zero-torque method [
13], Elastic-rigid support method [
14], etc. Of course, with the continuous deepening of the application of information technology, it is also possible to determine the size of the cable force through structural health monitoring (SHM) technology [
15]. This technology can monitor the cable force of the tensioned cable in real-time. When the cable force changes, engineers can use the information provided by the detection system [
16] to formulate a plan for whether to adjust the size of the cable force to ensure the safety of the bridge construction process and subsequent operation [
17].
Determining cable forces through structural health monitoring techniques is a commonly used method across various types of structures, including bridges, buildings, and mechanical equipment. This approach relies on the utilization of sensors and monitoring technologies to capture specific parameters of the structure, enabling the estimation of cable forces through data analysis. Here is a general overview of determining cable forces through health monitoring [
18,
19]: (1) Appropriate sensors such as strain gauges, pressure sensors, deflection sensors, accelerometers, etc., are installed on the structure to measure physical or dynamic parameters related to cable forces. (2) Data collected by the sensors is acquired and logged. This is often conducted through data acquisition units or wireless sensor networks. (3) By analyzing the data, the structural response can be inferred, such as changes in strain, vibration frequencies, etc. These responses are related to the forces or cable forces acting on the structure. (4) Based on known structural properties and mechanical models, mathematical models of the structure are developed using the acquired response data. This process incorporates structural characteristics and domain knowledge.
For example, the relationship between the cable strain
ε and the tension
T can be expressed by the following Formula (1):
where
A represents the cross-sectional area of the cable and
E represents Young’s modulus of the cable material.
Regarding the relationship between frequency and stiffness, the natural frequency (
f) of a structure is related to its stiffness (
k) and mass (
m) through the following Formula (2):
where
f is the natural frequency in Hz,
k is the stiffness coefficient in N/m, and
m is the mass of the structure in kg.
Utilizing the established mathematical models and the results of data analysis, cable forces acting on the structure are estimated from the structural responses (5).
The commonly used cable force calculation methods are the forward analysis method [
20] and the forward iteration method [
21]. The forward analysis method is based on the actual structure construction sequence step by step to calculate and finally obtain the bridge structure stress state method. The forward iteration method is used to determine the reasonable construction state of the bridge through the forward analysis of the large cycle. Its calculation feature is to give each design variable an initial assumed value and then strictly follow the actual construction sequence using step-by-step structural analysis. According to the calculation results, the value of the initial design variable is modified to iterate until the objective function achieves satisfactory calculation accuracy. The calculations in this paper will use the forward iteration method to determine the cable force of the bridge construction stage through 1–2 iterations.
2.1. Calculation Principle
The arch rib alignment is controlled according to the principle of “quiet do not move“; that is, after the cable tension of the new arch rib segment, the vertical displacement of the adjacent arch rib segment remains basically unchanged. This method has the following advantages: (1) prevents the temporary joint of the flange plate in the pipe from being subjected to large bending moment and shear force, resulting in an increase in the weld width and the generation of misalignments; (2) prevents the temporary hinge of the arch foot from large rotations in theory and reduces the calculation error caused by the inconsistency between the actual rotation condition and the ideal hinge position; (3) reduces the displacement of the buckle point of the tensioned buckle cable, the change in the buckle cable force is small, and the difficulty of the deviation control of the buckle tower is reduced; (4) the cable force is tensioned once without repeated adjustment. The calculation formulae are shown below:
where
T is the cable force;
n is the number of iterations;
δ is the vertical displacement (positive downward) generated at the front end of the previous segment when the cable tension is in the new stage; and
k is the influence coefficient of cable force, the calculation method is
. Among them,
δn + 1 is the vertical displacement of the front end of the previous segment after the (
n + 1) th iteration. When it is less than the allowable error
ε, it can be considered that the cable force
Tn meets the requirements.
According to the obtained cable force, using the influence matrix method [
22] to consider the influence coefficient of the cable force on the closure size, the adjusted cable force is obtained. For example, in the tension stage of the
jth segment, the displacement
di of the control point
i satisfies the following formula:
where
aij is the displacement variation of control point
i when the unit force (1 kN) is applied to the
j section of the cable, and
wg and
wl are the influences of the dead weight load and other construction loads on control point
i.
We rewrite it into a matrix form:
where [
a] is the influence matrix of the vertical displacement of each control point when the unit cable force is tensioned in each segment. In cable-stayed suspension construction, the cable force can only adjust the displacement of the installed segment, and the subsequent uninstalled segment will not be affected by the current cable tension. Therefore, [
a] is a triangular matrix:
2.2. Calculation Method
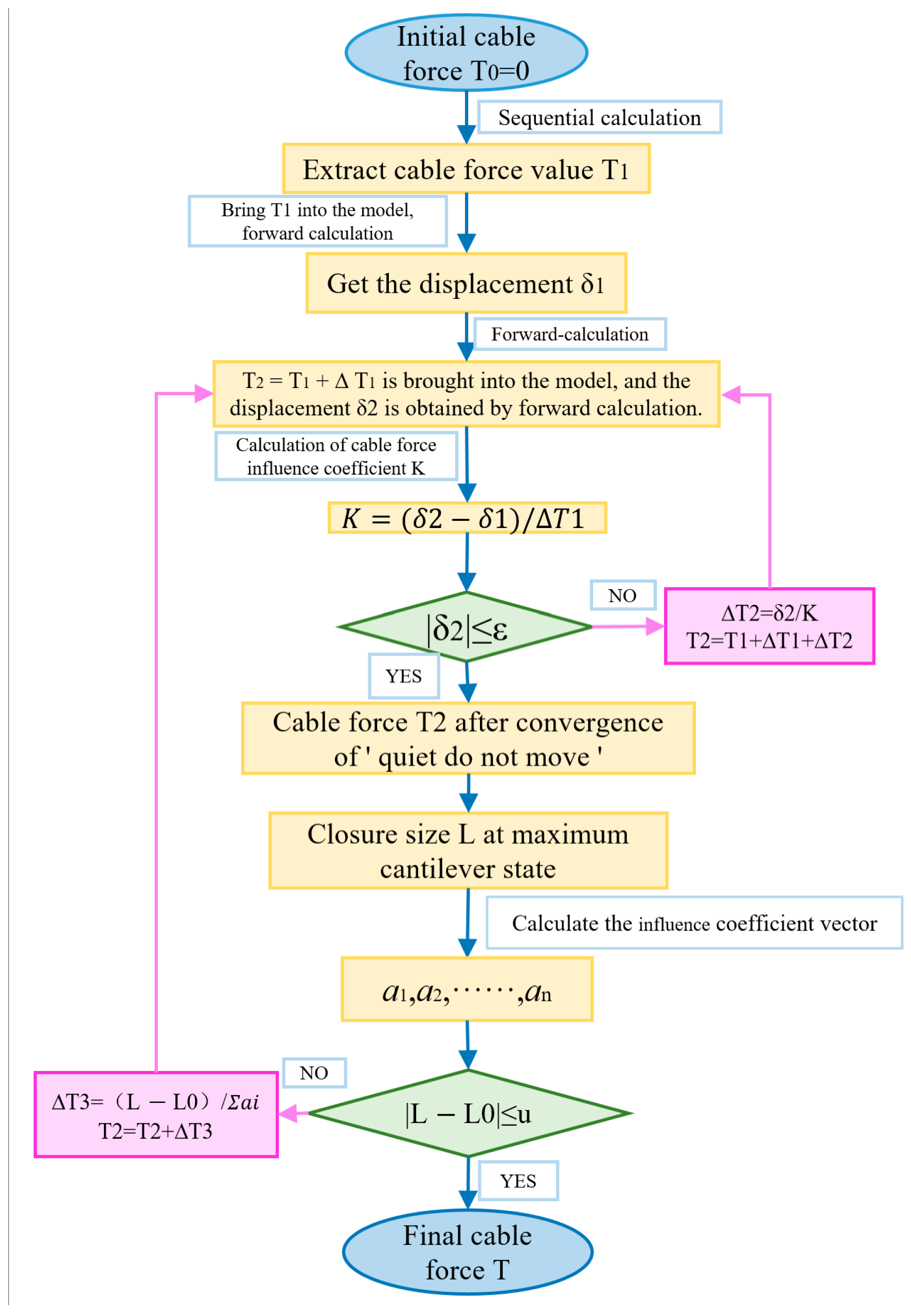
① Based on the principle that the downward displacement of the self-weight of the new hoisting segment to the front end of the adjacent segment and the upward displacement of the front end of the adjacent segment caused by the tension of the new segment are equal, the new tension cable force is iteratively solved. Because the geometric nonlinearity of the arch bridge has little effect on the calculation, it can converge after 1–2 iterations. ② According to the cable force calculated in the first step, the tangent assembly calculation is carried out, and the calculated size, L, of the closure gap and the theoretical length, L0, of the closure section in the maximum cantilever state are compared. If L = L0, according to the theory of the unstressed state method, the calculation of the bare arch alignment after the closure of the loose cable will be equal to the ideal bare arch alignment. ③ If there is a big difference between L and L0, the cable force calculated in the first step needs to be adjusted. First, the influence coefficient of each cable on the size of the closure is calculated, and then the coefficient is introduced for iterative calculation.
The advantage of this method is that the alignment of the arch bridge does not change much during the construction of the arch rib, and the alignment during the closure is similar to the manufacturing alignment. When the buckle cable is removed, the bare arch alignment is in good agreement with the ideal bare arch alignment, and the size error of the closure is small, which can meet the requirements of the ideal bare arch alignment. The flow chart of cable force calculation is shown in
Figure 1.
5. Conclusions
This paper is based on the control principle of “quiet do not move“ for the steel pipe arch ribs of the concrete-filled, steel tube arch bridge erected using the cable-stayed buckle-hang method. The forward iteration method is used to calculate the cable force, and the influence matrix method is used to calculate and adjust the cable force of the initial tension. The conclusions are as follows.
(1) Based on the principle of “quiet do not move”, the line shape is controlled, and the forward analysis method is adopted. The cable force is calculated by 1–2 iterations and then adjusted according to the influence matrix method. The tensioned cable force can make the bridge reach the ideal state.
(2) The calculation method of cable force does not involve complex calculation formulas, which makes it easy to master, and the calculation accuracy can meet the actual engineering requirements.
(3) The cable force obtained by the calculation method makes the absolute value and variation in the cumulative vertical displacement in the process of the main arch cantilever assembly smaller, the main arch alignment smooth, and the alignment control accuracy high. The application to the actual bridge shows that the method is effective and can achieve the expected requirements for arch rib installation alignment.
(4) The cable force calculated in this paper is applied to the actual engineering project, and the result is good. It is expected that the follow-up studies can find a better method for calculating the cable force of the arch bridge on the basis of this paper, providing better help to follow-up engineering projects.






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}