Vehicle Load Identification Using Machine Vision and Displacement Influence Lines

Abstract
:1. Introduction
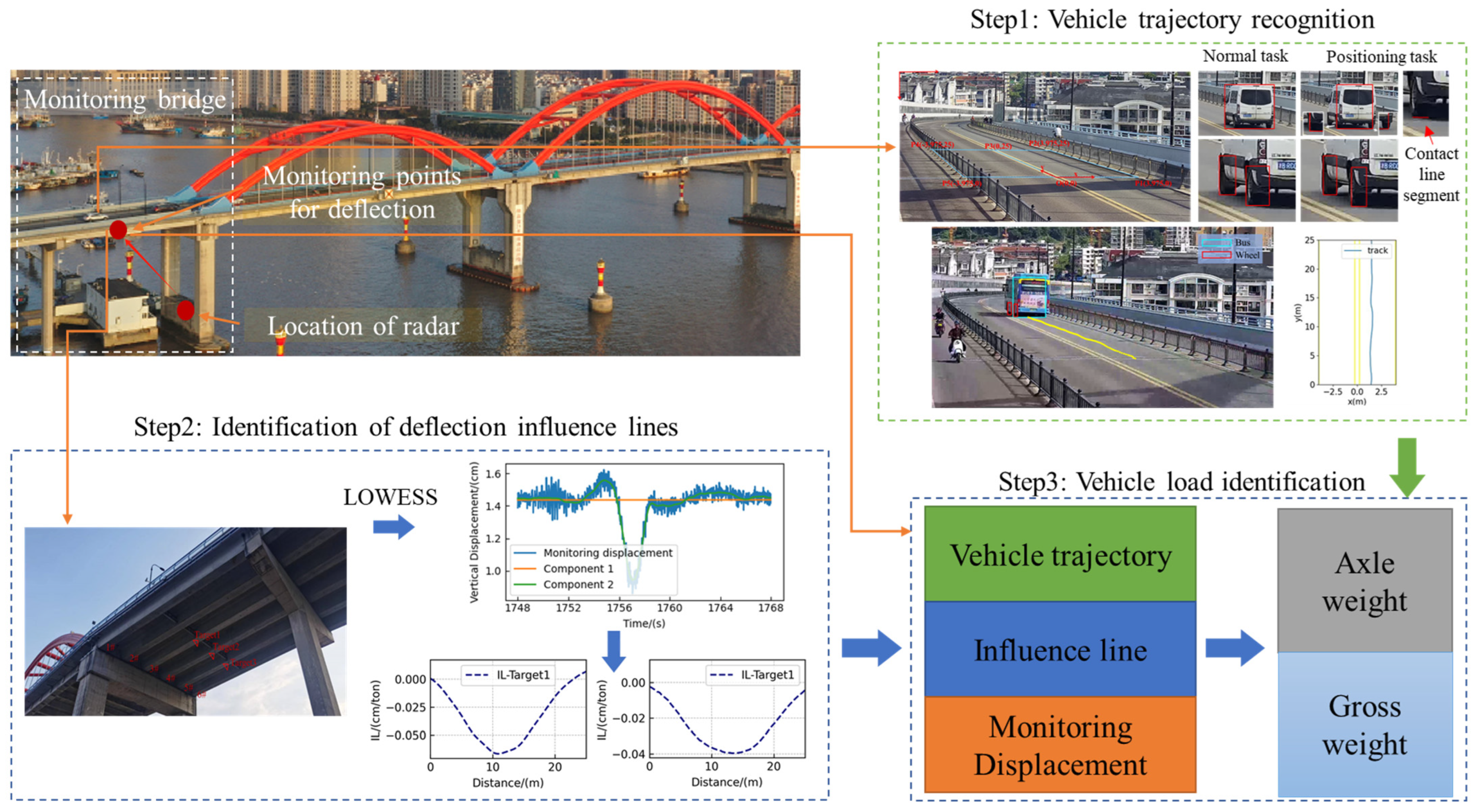
2. Technical Roadmap and Methods
2.1. Technology Roadmap
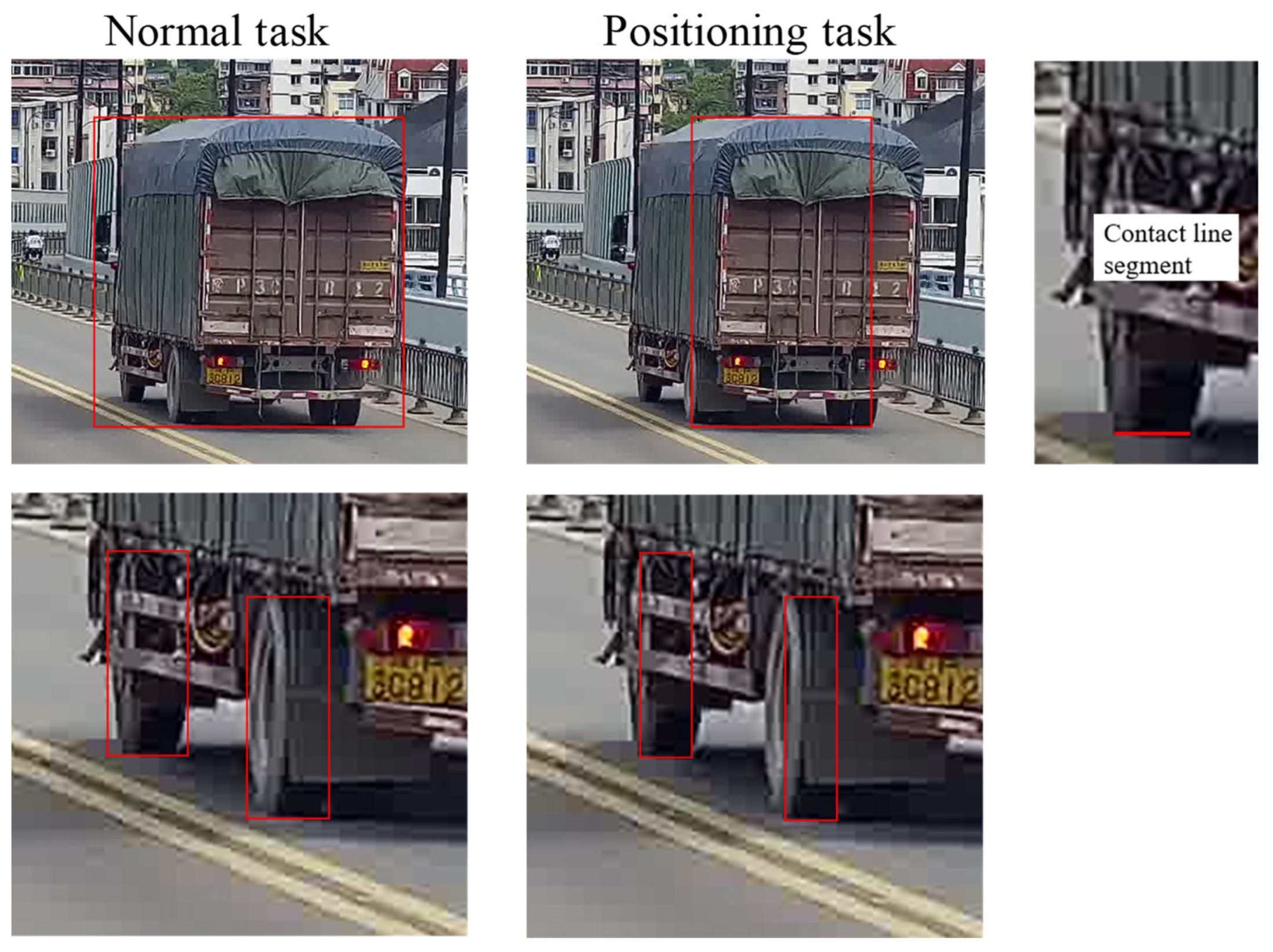
2.2. Vehicle Trajectory Recognition Based on Machine Vision
2.3. Theory of Bridge Displacement Influence Line Recognition
2.4. Theory of Vehicle Load Identification
3. Case Study
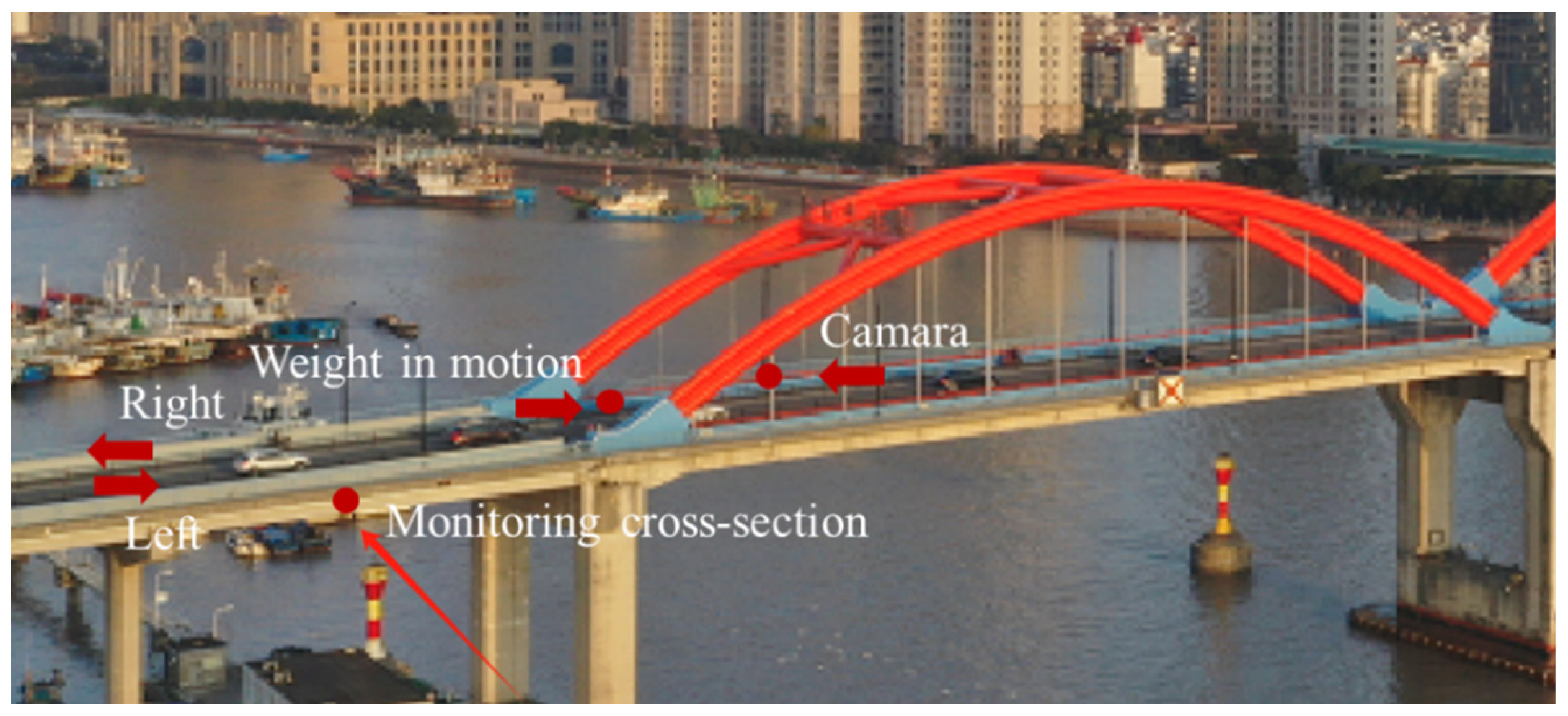
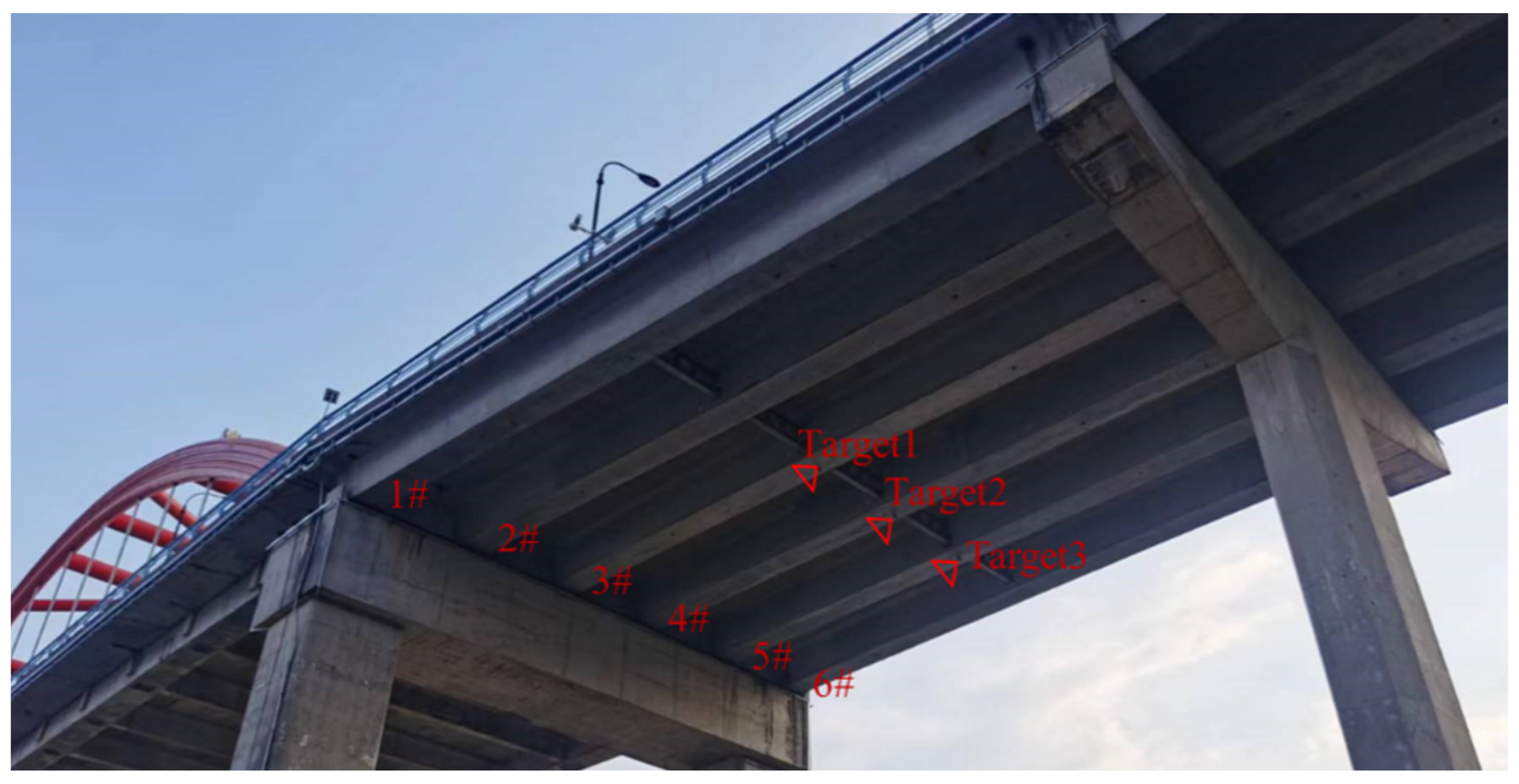
3.1. Overview of the Monitoring Bridge
3.2. Data Preprocessing
3.2.1. Data Alignment
3.2.2. Extraction of Vehicle-Induced Static Displacement
4. Results and Discussion
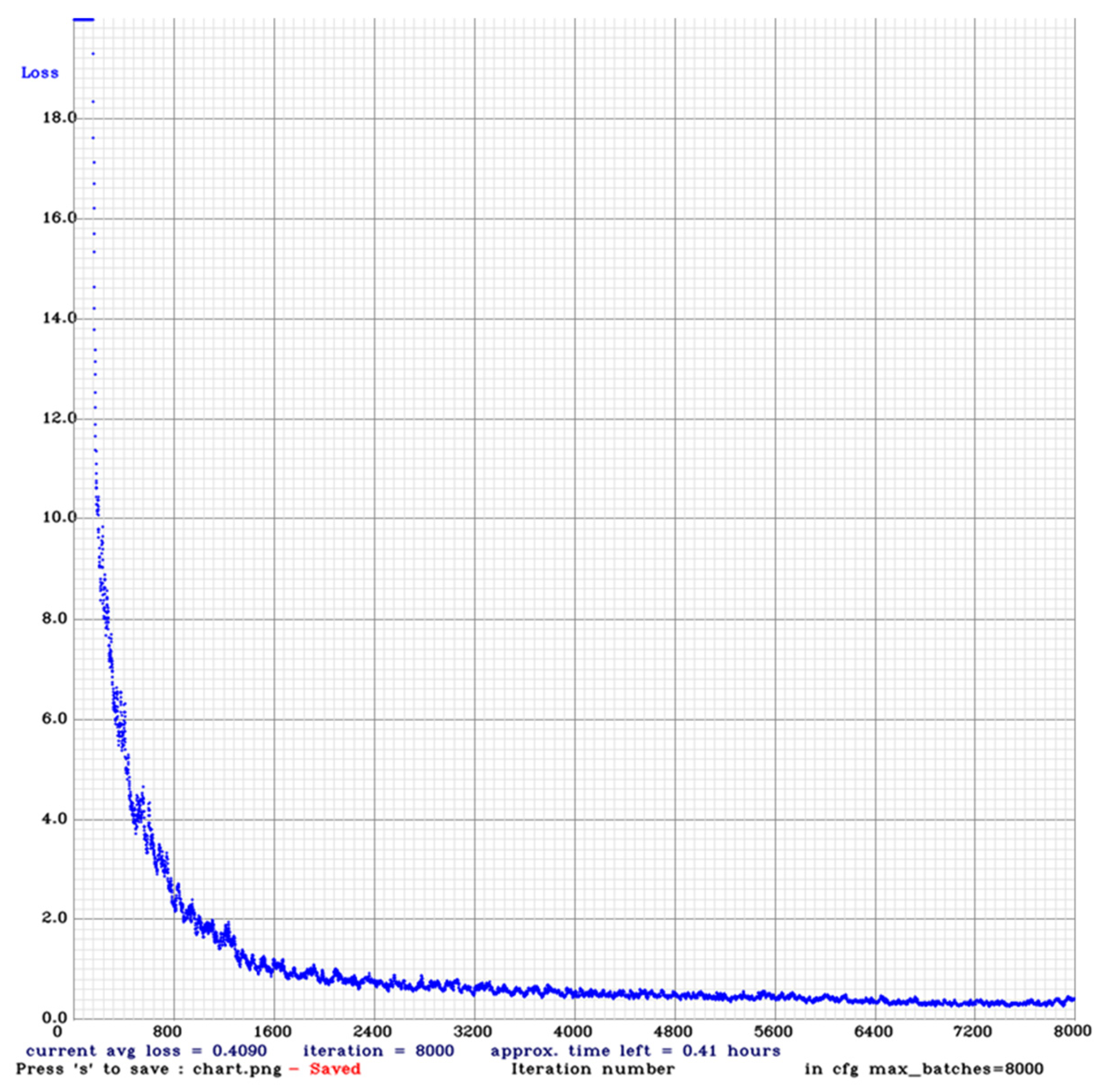
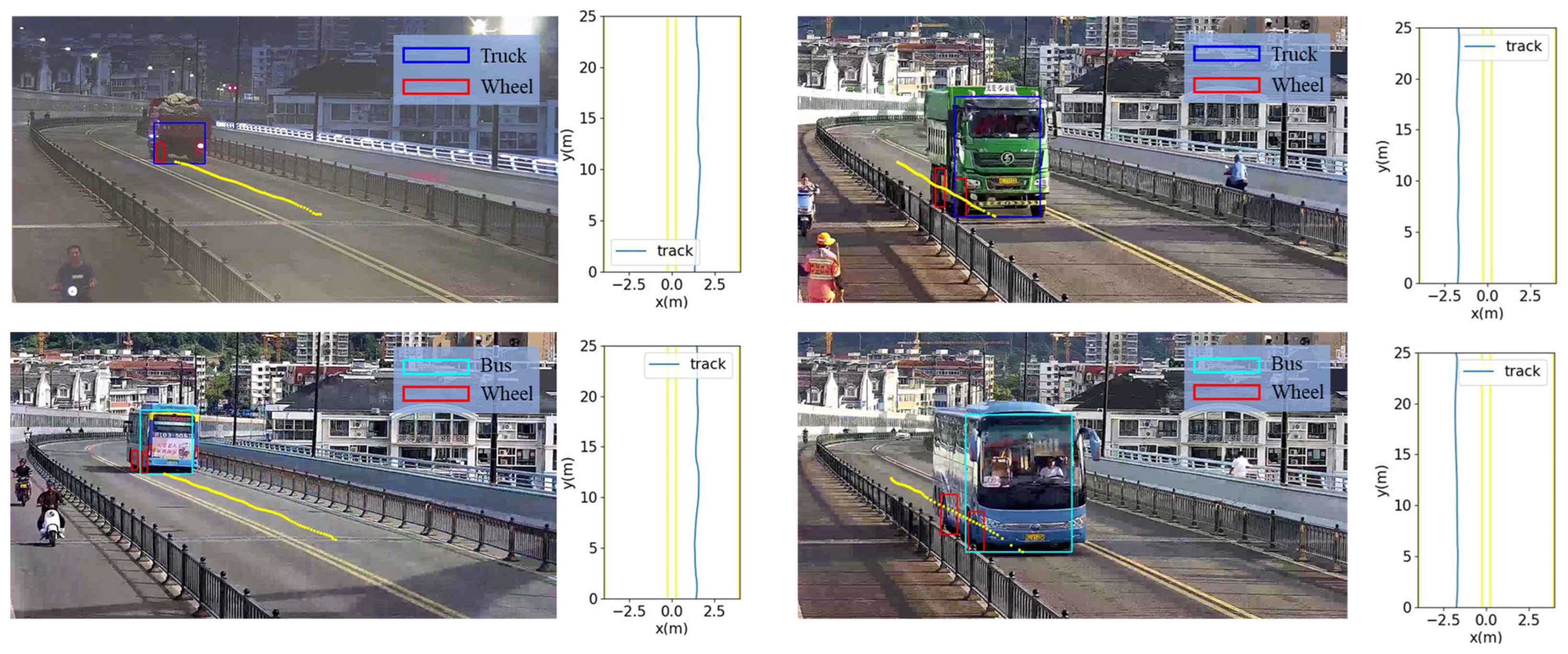
4.1. Results of Vehicle Trajectory Recognition
- (1)
- To minimize noise interference, heavy-duty vehicles should be selected. In this study, vehicles weighing 5 tons or more are chosen.
- (2)
- To mitigate the impact of bridge responses caused by other vehicles on influence line recognition results, the selected calibration vehicles should be the only motorized vehicles on the bridge.
4.2. Recognition of Influence Lines
4.3. Identification of Vehicle Weight
5. Conclusions
- (1)
- The vehicle track recognition algorithm based on YOLO v4 accurately identifies the positions of vehicles and axles.
- (2)
- Utilizing the vehicle’s driving trajectory and the separated static displacement caused by the vehicle, the LSQR algorithm can precisely identify the displacement influence line.
- (3)
- The algorithm proposed in this paper was applied to recognize axle loads and total weights for various vehicle types under different driving conditions. The results indicate that the algorithm can accurately identify the total weight of axles within the same axle group. However, its ability to accurately recognize the axle load of individual axles within the same axle group is limited. After consolidating the axle loads within the same axle group, the analysis shows that the majority of axle load identification errors are within 2 tons, with 62.5% achieving errors within 2 tons for total weight identification. The identification errors for gross vehicle weight do not exceed 25%.
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Moghadam, A.; AlHamaydeh, M.; Sarlo, R. Bridge-weigh-in-motion approach for simultaneous multiple vehicles on concrete-box-girder bridges. Autom. Constr. 2022, 137, 104179. [Google Scholar] [CrossRef]
- Zhuang, Y.; Qin, J.; Chen, B.; Dong, C.; Xue, C.; Easa, S.M. Data loss reconstruction method for a bridge weigh-in-motion system using generative adversarial networks. Sensors 2022, 22, 858. [Google Scholar] [CrossRef]
- Haugen, T.; Levy, J.R.; Aakre, E.; Tello, M.E.P. Weigh-in-Motion equipment–experiences and challenges. Transp. Res. Procedia 2016, 14, 1423–1432. [Google Scholar] [CrossRef]
- Yu, Y.; Cai, C.S.; Deng, L. State-of-the-art review on bridge weigh-in-motion technology. Adv. Struct. Eng. 2016, 19, 1514–1530. [Google Scholar] [CrossRef]
- Sujon, M.; Dai, F. Application of weigh-in-motion technologies for pavement and bridge response monitoring: State-of-the-art review. Autom. Constr. 2021, 130, 103844. [Google Scholar] [CrossRef]
- Moses, F. Weigh-in-motion system using instrumented bridges. Transp. Eng. J. ASCE 1979, 105, 233–249. [Google Scholar] [CrossRef]
- O’Connor, C.; Chan, T.H.T. Dynamic wheel loads from bridge strains. J. Struct. Eng. 1988, 114, 1703–1723. [Google Scholar] [CrossRef]
- Moghadam, A.; AlHamaydeh, M.; Sarlo, R. Nothing-on-road bridge-weigh-in-motion used for long-span, concrete-box-girder bridges: An experimental case study. J. Struct. Integr. Maint. 2023, 8, 79–90. [Google Scholar] [CrossRef]
- Simonyan, K.; Zisserman, A. Very deep convolutional networks for large-scale image recognition. arXiv 2014, arXiv:1409.1556. [Google Scholar]
- Redmon, J.; Divvala, S.; Girshick, R.; Farhadi, A. You only look once: Unified, real-time object detection. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Las Vegas, NV, USA, 27–30 June 2016. [Google Scholar]
- Qian, Y.; Huang, C.; Han, B.; Cheng, F.; Qiu, S.; Deng, H.; Duan, X.; Zheng, H.; Liu, Z.; Wu, J. Quantitative Analysis of Bolt Loosening Angle Based on Deep Learning. Buildings 2024, 14, 163. [Google Scholar] [CrossRef]
- Yin, Y.; Yu, Q.; Hu, B.; Zhang, Y.; Chen, W.; Liu, X.; Ding, X. A vision monitoring system for multipoint deflection of large-span bridge based on camera networking. Comput. Aided Civ. Infrastruct. Eng. 2023, 38, 1879–1891. [Google Scholar] [CrossRef]
- Xia, Y.; Jian, X.; Yan, B.; Su, D. Infrastructure safety oriented traffic load monitoring using multi-sensor and single camera for short and medium span bridges. Remote Sens. 2019, 11, 2651. [Google Scholar] [CrossRef]
- Ge, L.; Dan, D.; Koo, K.Y.; Chen, Y. An improved system for long-term monitoring of full-bridge traffic load distribution on long-span bridges. Structures 2023, 54, 1076–1089. [Google Scholar] [CrossRef]
- Xu, Z.; Wei, B.; Zhang, J. Reproduction of spatial–temporal distribution of traffic loads on freeway bridges via fusion of camera video and ETC data. Structures 2023, 53, 1476–1488. [Google Scholar] [CrossRef]
- Zheng, X.; Yang, D.H.; Yi, T.H.; Li, H.N. Development of bridge influence line identification methods based on direct measurement data: A comprehensive review and comparison. Eng. Struct. 2019, 198, 109539. [Google Scholar] [CrossRef]
- OBrien, E.J.; Quilligan, M.J.; Karoumi, R. Calculating an influence line from direct measurements. Proc. Inst. Civ. Eng. Bridge Eng. 2006, 159, 31–34. [Google Scholar] [CrossRef]
- Wang, W.; Deng, L.; Shao, X. Fatigue design of steel bridges considering the effect of dynamic vehicle loading and overloaded trucks. J. Bridge Eng. 2016, 21, 04016048. [Google Scholar] [CrossRef]
- Broquet, C.; Bailey, S.F.; Fafard, M.; Brühwiler, E. Dynamic behavior of deck slabs of concrete road bridges. J. Bridge Eng. 2004, 9, 137–146. [Google Scholar] [CrossRef]
- Zhao, H.; Uddin, N.; Shao, X.; Zhu, P.; Tan, C. Field-calibrated influence lines for improved axle weight identification with a bridge weigh-in-motion system. Struct. Infrastruct. Eng. 2015, 11, 721–743. [Google Scholar] [CrossRef]
- Ieng, S.S. Bridge influence line estimation for bridge weigh-in-motion system. J. Comput. Civ. Eng. 2015, 29, 06014006. [Google Scholar] [CrossRef]
- Frøseth, G.T.; Rønnquist, A.; Cantero, D.; Øiseth, O. Influence line extraction by deconvolution in the frequency domain. Comput. Struct. 2017, 189, 21–30. [Google Scholar] [CrossRef]
- Jian, X.; Xia, Y.; Chatzi, E.; Lai, Z. Bridge influence surface identification using a deep multilayer perceptron and computer vision techniques. Struct. Health Monit. 2023. [Google Scholar] [CrossRef]
- Jian, X.; Xia, Y.; Sun, S.; Sun, L. Integrating bridge influence surface and computer vision for bridge weigh-in-motion in complicated traffic scenarios. Struct. Control Health Monit. 2022, 29, e3066. [Google Scholar] [CrossRef]
- Richardson, J.; Jones, S.; Brown, A.; O’Brien, E.; Hajializadeh, D. On the use of bridge weigh-in-motion for overweight truck enforcement. Int. J. Heavy Veh. Syst. 2014, 21, 83–104. [Google Scholar] [CrossRef]
- Rowley, C.W.; OBrien, E.J.; González, A.; Žnidarič, A. Experimental testing of a moving force identification bridge weigh-in-motion algorithm. Exp. Mech. 2009, 49, 743–746. [Google Scholar] [CrossRef]
- OBrien, E.J.; Rowley, C.W.; Gonzalez, A.; Green, M.F. A regularised solution to the bridge weigh-in-motion equations. Int. J. Heavy Veh. Syst. 2009, 16, 310–327. [Google Scholar] [CrossRef]
- OBrien, E.J.; Zhang, L.; Zhao, H.; Hajializadeh, D. Probabilistic bridge weigh-in-motion. Can. J. Civ. Eng. 2018, 45, 667–675. [Google Scholar] [CrossRef]
- Kim, S.; Lee, J.; Park, M.-S.; Jo, B.-W. Vehicle signal analysis using artificial neural networks for a bridge weigh-in-motion system. Sensors 2009, 9, 7943–7956. [Google Scholar] [CrossRef]
- Szinyéri, B.; Kővári, B.; Völgyi, I.; Kollár, D.; Joó, A.L. A strain gauge-based Bridge Weigh-In-Motion system using deep learning. Eng. Struct. 2023, 277, 115472. [Google Scholar] [CrossRef]
- He, W.; Liu, J.; Song, S.; Liu, P. A non-contact vehicle weighing approach based on bridge weigh-in-motion framework and computer vision tech-niques. Measurement 2024, 225, 113994. [Google Scholar] [CrossRef]
- Arróspide, J.; Salgado, L.; Nieto, M.; Mohedano, R. Homography-based ground plane detection using a single on-board camera. IET Intell. Transp. Syst. 2010, 4, 149–160. [Google Scholar] [CrossRef]
- Paige, C.C.; Saunders, M.A. LSQR: An algorithm for sparse linear equations and sparse least squares. ACM Trans. Math. Softw. (TOMS) 1982, 8, 43–71. [Google Scholar] [CrossRef]
- Paige, C.C.; Saunders, M.A. Algorithm 583: LSQR: Sparse linear equations and least squares problems. ACM Trans. Math. Softw. (TOMS) 1982, 8, 195–209. [Google Scholar] [CrossRef]
- Saunders, M.A. Solution of sparse rectangular systems using LSQR and CRAIG. BIT Numer. Math. 1995, 35, 588–604. [Google Scholar] [CrossRef]
- Lampe, J.; Voss, H. Large-scale Tikhonov regularization of total least squares. J. Comput. Appl. Math. 2013, 238, 95–108. [Google Scholar] [CrossRef]
- Hansen, P.C. Analysis of discrete ill-posed problems by means of the L-curve. SIAM Rev. 1992, 34, 561–580. [Google Scholar] [CrossRef]
- Gonçalves, M.S.; Lopez, R.H.; Oroski, E.; Valente, A.M. A Bayesian algorithm with second order autoregressive errors for B-WIM weight estimation. Eng. Struct. 2022, 250, 113353. [Google Scholar] [CrossRef]
- Yamaguchi, E.; Kawamura, S.I.; Matuso, K.; Matsuki, Y.; Naito, Y. Bridge-Weigh-in-Motion by two-span continuous bridge with skew and heavy-truck flow in Fukuoka area, Japan. Adv. Struct. Eng. 2009, 12, 115–125. [Google Scholar] [CrossRef]
- Zhao, H.; Uddin, N.; O’Brien, E.J.; Shao, X.; Zhu, P. Identification of vehicular axle weights with a bridge weigh-in-motion system considering transverse distribution of wheel loads. J. Bridge Eng. 2014, 19, 04013008. [Google Scholar] [CrossRef]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Type | Direction | Speed/(km/h) | Weight of Axles/(ton) | Wheelbase/(m) |
|---|---|---|---|---|
| Truck | Right | 34 | 2.78/10.13 | 3.5 |
| Truck | Left | 38 | 4.97/3.78/4.15 | 3.6/1.4 |
| Number | Direction | Speed/(km/h) | Weight of Axles/(ton) | GVW | Wheelbase/(m) | |||
|---|---|---|---|---|---|---|---|---|
| Axle 1 | Axle 2 | Axle 3 | Axle 1–Axle 2 | Axle 2–Axle 3 | ||||
| 1 | Right | 39 | 3.76 | 6.92 | / | 10.68 | 5.8 | / |
| 2 | Left | 63 | 2.86 | 7.96 | / | 10.82 | 5.6 | / |
| 3 | Left | 24 | 2.54 | 8.13 | / | 10.67 | 3.3 | / |
| 4 | Left | 35 | 3.76 | 6.84 | / | 10.6 | 5.7 | / |
| 5 | Left | 39 | 3.73 | 7.88 | / | 11.61 | 5.2 | / |
| 6 | Left | 39 | 3.72 | 7.09 | / | 10.81 | 5.7 | / |
| 7 | Left | 42 | 3.48 | 7.91 | / | 11.39 | 5.3 | / |
| 8 | Left | 39 | 3.50 | 7.70 | / | 11.2 | 5.2 | / |
| 9 | Right | 39 | 4.85 | 8.49 | / | 13.34 | 5.7 | / |
| 10 | Right | 40 | 4.63 | 8.18 | / | 12.81 | 5.7 | / |
| 11 | Right | 39 | 4.23 | 7.78 | / | 12.01 | 5.7 | / |
| 12 | Right | 35 | 4.11 | 11.5 | / | 15.61 | 3.5 | / |
| 13 | Right | 37 | 3.72 | 7.07 | / | 10.79 | 5.8 | / |
| 14 | Left | 35 | 4.43 | 4.76 | 4.86 | 14.05 | 3.6 | 1.4 |
| 15 | Left | 45 | 5.29 | 4.9 | 4.27 | 14.46 | 3.6 | 1.4 |
| 16 | Left | 45 | 5.30 | 4.41 | 4.61 | 14.32 | 3.6 | 1.4 |
| No. | ① Axle Weight Measured by WIM/(ton) | ② Identified Axle Weight/(ton) | Difference = ① − ②/(ton) | ||||||
|---|---|---|---|---|---|---|---|---|---|
| Axle 1 | Axle 2 | Axle 3 | Axle 1 | Axle 2 | Axle 3 | Axle 1 | Axle 2 | Axle 3 | |
| 1 | 3.76 | 6.92 | / | 2.88 | 5.77 | / | +0.88 | +1.15 | / |
| 2 | 2.86 | 7.96 | / | 3.76 | 5.34 | / | −0.9 | +2.62 | / |
| 3 | 2.54 | 8.13 | / | 2.78 | 8.16 | / | −0.24 | −0.03 | / |
| 4 | 3.76 | 6.84 | / | 3.66 | 5.47 | / | +0.1 | +1.37 | / |
| 5 | 3.73 | 7.88 | / | 2.14 | 7.16 | / | +1.59 | +0.72 | / |
| 6 | 3.72 | 7.09 | / | 1.29 | 7.32 | / | +2.43 | −0.23 | / |
| 7 | 3.48 | 7.91 | / | 1.6 | 7.94 | / | +1.88 | −0.03 | / |
| 8 | 3.50 | 7.70 | / | 1.68 | 7.78 | / | +1.82 | −0.08 | / |
| 9 | 4.85 | 8.49 | / | 3.53 | 7.18 | / | +1.32 | +1.31 | / |
| 10 | 4.63 | 8.18 | / | 3.2 | 6.47 | / | +1.43 | +1.71 | / |
| 11 | 4.23 | 7.78 | / | 3.27 | 6.58 | / | +0.96 | +1.2 | / |
| 12 | 4.11 | 11.5 | / | 3.94 | 10.18 | / | +0.17 | +1.32 | / |
| 13 | 3.72 | 7.07 | / | 2.93 | 5.96 | / | +0.79 | +1.11 | / |
| 14 | 4.43 | 4.76 | 4.86 | 2.27 | 0 | 10.64 | +2.16 | +4.76 | −5.78 |
| 15 | 5.29 | 4.9 | 4.27 | 4.68 | 0 | 8.5 | +0.61 | +4.9 | −4.23 |
| 16 | 5.30 | 4.41 | 4.61 | 5.73 | 0 | 9.81 | −0.43 | +4.41 | −5.2 |
| No. | ① GVW (ton) | ② Identified GVW (ton) | Difference = ① − ② (ton) | (① − ②)/① (%) |
|---|---|---|---|---|
| 1 | 10.68 | 8.65 | +2.03 | +19.0 |
| 2 | 10.82 | 9.1 | +1.72 | +15.9 |
| 3 | 10.67 | 10.94 | −0.27 | −2.5 |
| 4 | 10.6 | 9.13 | +1.47 | +13.9 |
| 5 | 11.61 | 9.3 | +2.31 | +19.9 |
| 6 | 10.81 | 8.61 | +2.2 | +20.4 |
| 7 | 11.39 | 9.54 | +1.85 | +16.2 |
| 8 | 11.2 | 9.46 | +1.74 | +15.5 |
| 9 | 13.34 | 10.71 | +2.63 | +19.7 |
| 10 | 12.81 | 9.67 | +3.14 | +24.5 |
| 11 | 12.01 | 9.85 | +2.16 | +18.0 |
| 12 | 15.61 | 14.12 | +1.49 | +9.5 |
| 13 | 10.79 | 8.89 | +1.9 | +17.6 |
| 14 | 14.05 | 12.91 | +1.14 | +8.1 |
| 15 | 14.46 | 13.18 | +1.28 | +8.9 |
| 16 | 14.32 | 15.54 | −1.22 | −8.5 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the author. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Xu, W. Vehicle Load Identification Using Machine Vision and Displacement Influence Lines. Buildings 2024, 14, 392. https://doi.org/10.3390/buildings14020392
Xu W. Vehicle Load Identification Using Machine Vision and Displacement Influence Lines. Buildings. 2024; 14(2):392. https://doi.org/10.3390/buildings14020392
Chicago/Turabian StyleXu, Wencheng. 2024. "Vehicle Load Identification Using Machine Vision and Displacement Influence Lines" Buildings 14, no. 2: 392. https://doi.org/10.3390/buildings14020392
APA StyleXu, W. (2024). Vehicle Load Identification Using Machine Vision and Displacement Influence Lines. Buildings, 14(2), 392. https://doi.org/10.3390/buildings14020392