




Parameter Optimization of Friction Pendulum Bearings Based on the Adaptive Genetic Algorithm Considering the Overall Evolutionary Status
Abstract
:1. Introduction
2. Influence of Cross Probability and Mutation Probability on Genetic Algorithm
3. Adaptive Genetic Algorithm Considering the Overall Evolutionary Status
3.1. Adaptive Genetic Algorithm
3.2. Genetic Algorithm Considering Population Diversity
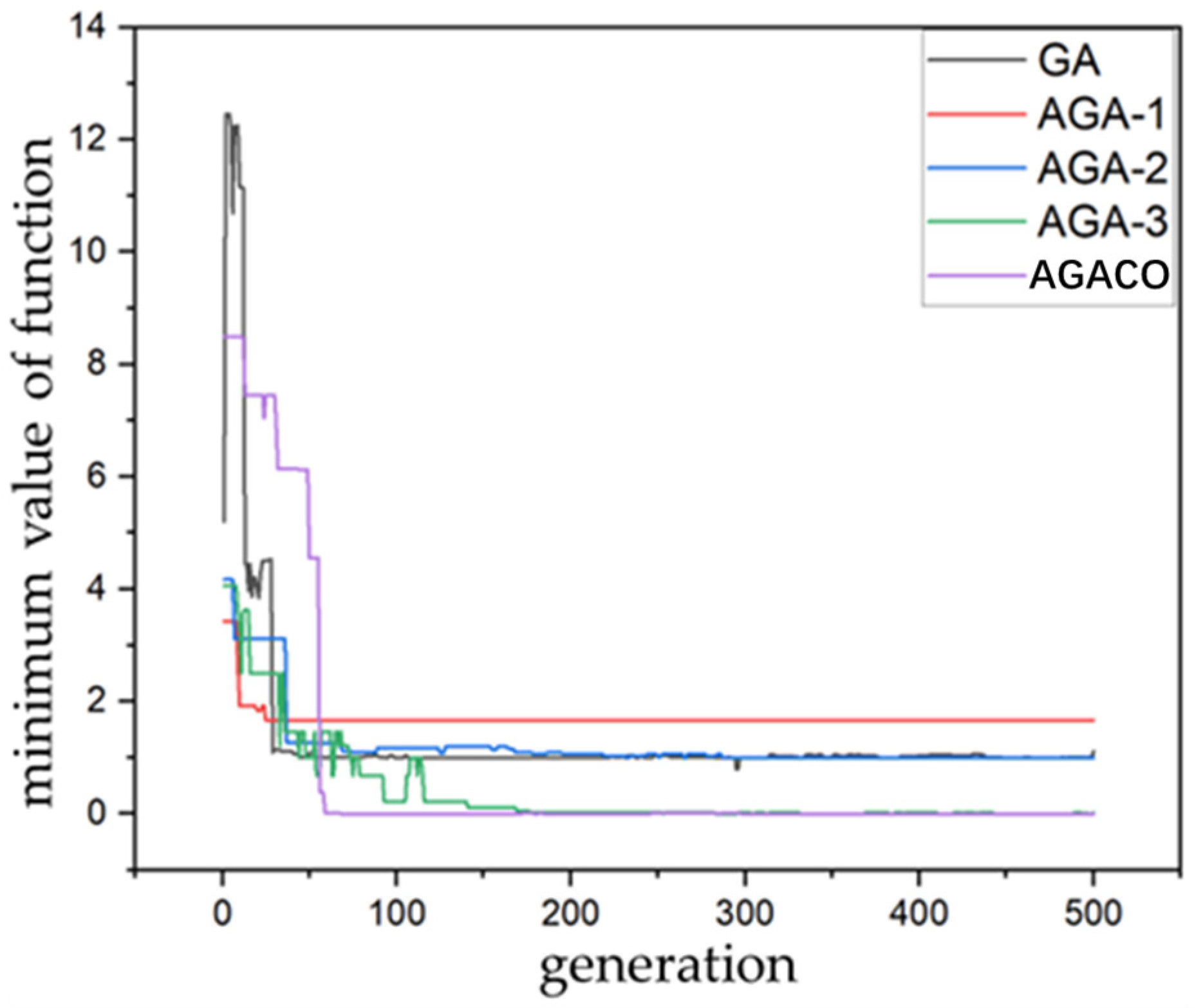
3.3. Validation of the Efficiency of the Improved Genetic Algorithm
4. Finite Element Numerical Simulation
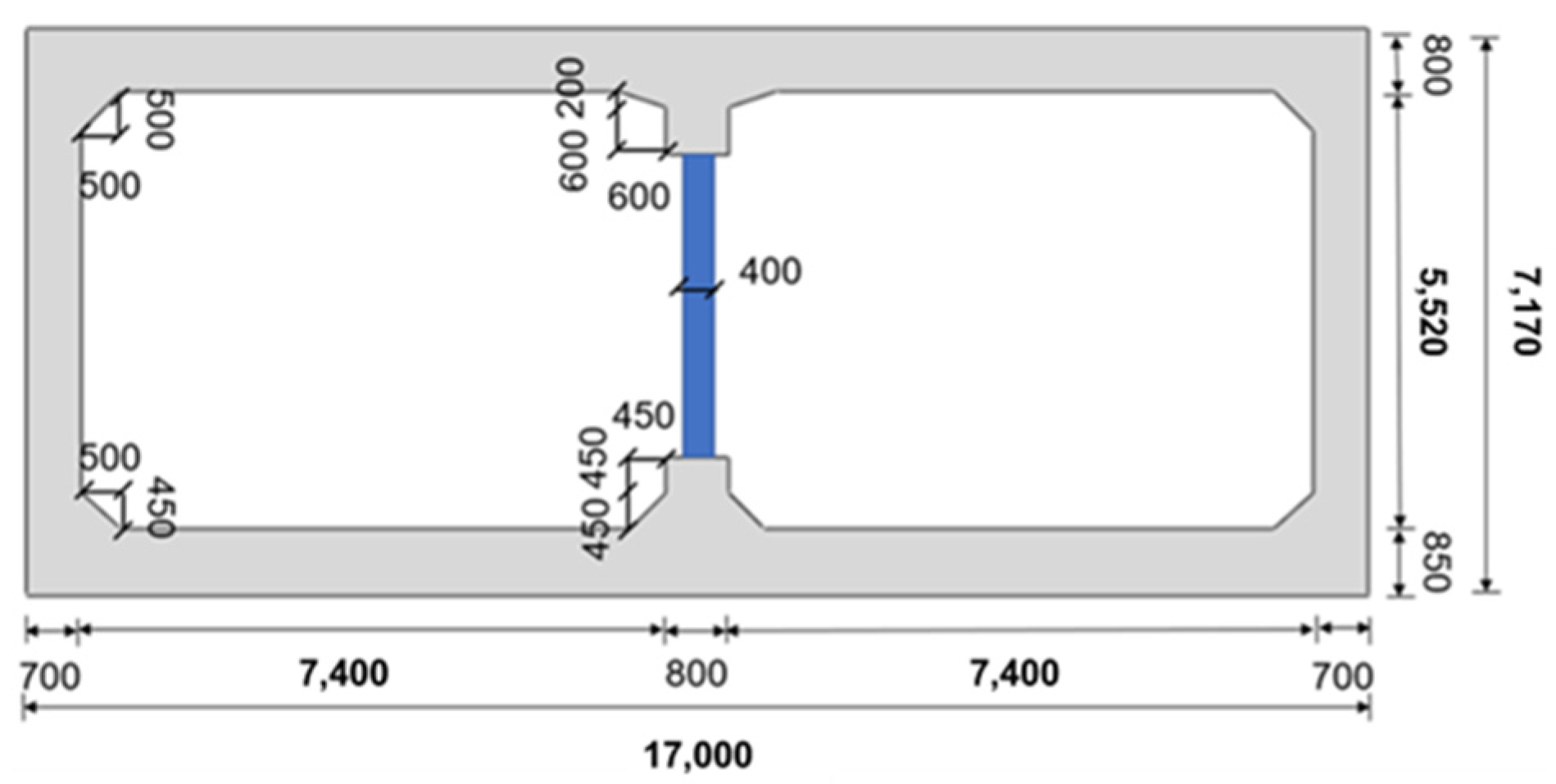
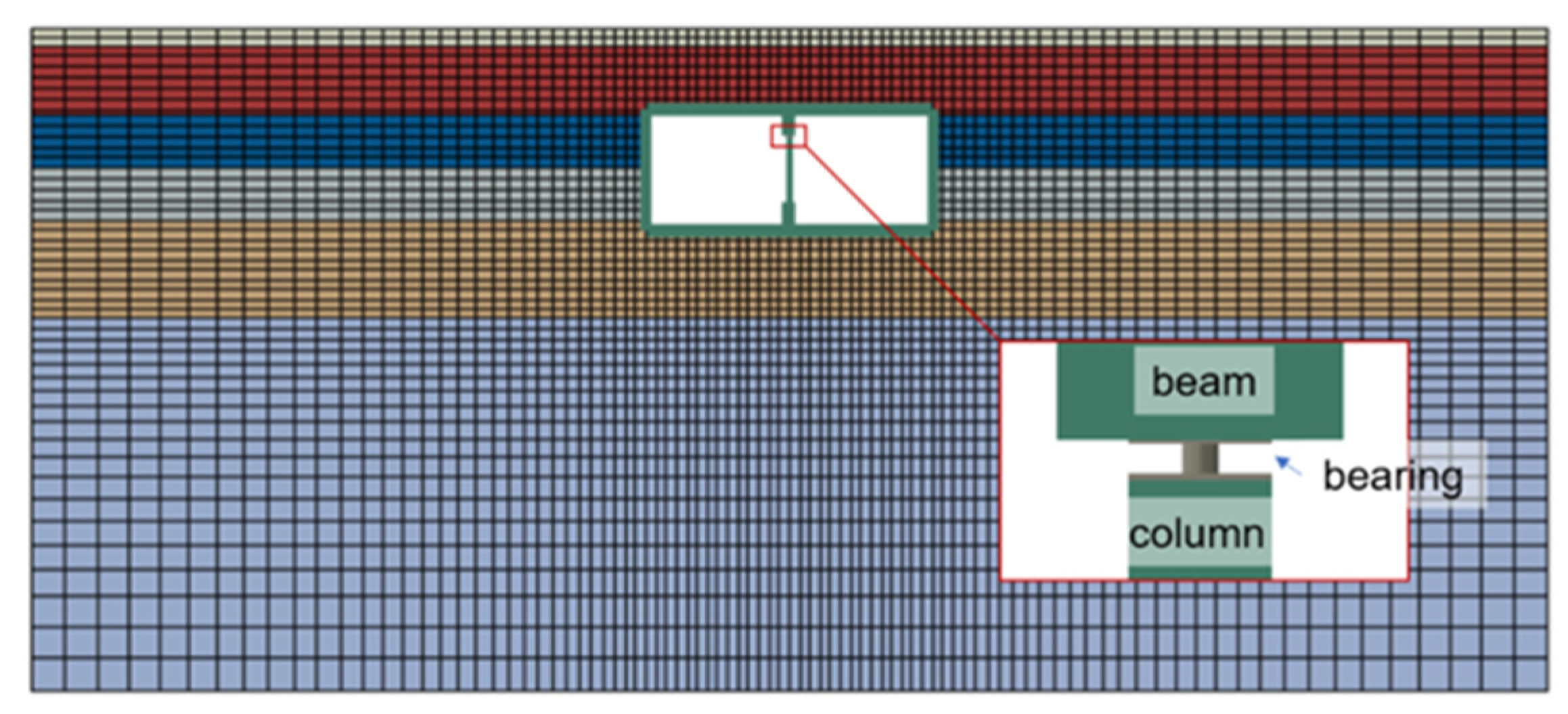
4.1. Finite Element of the Underground Station
4.2. Finite Element of the Friction Pendulum Bearings
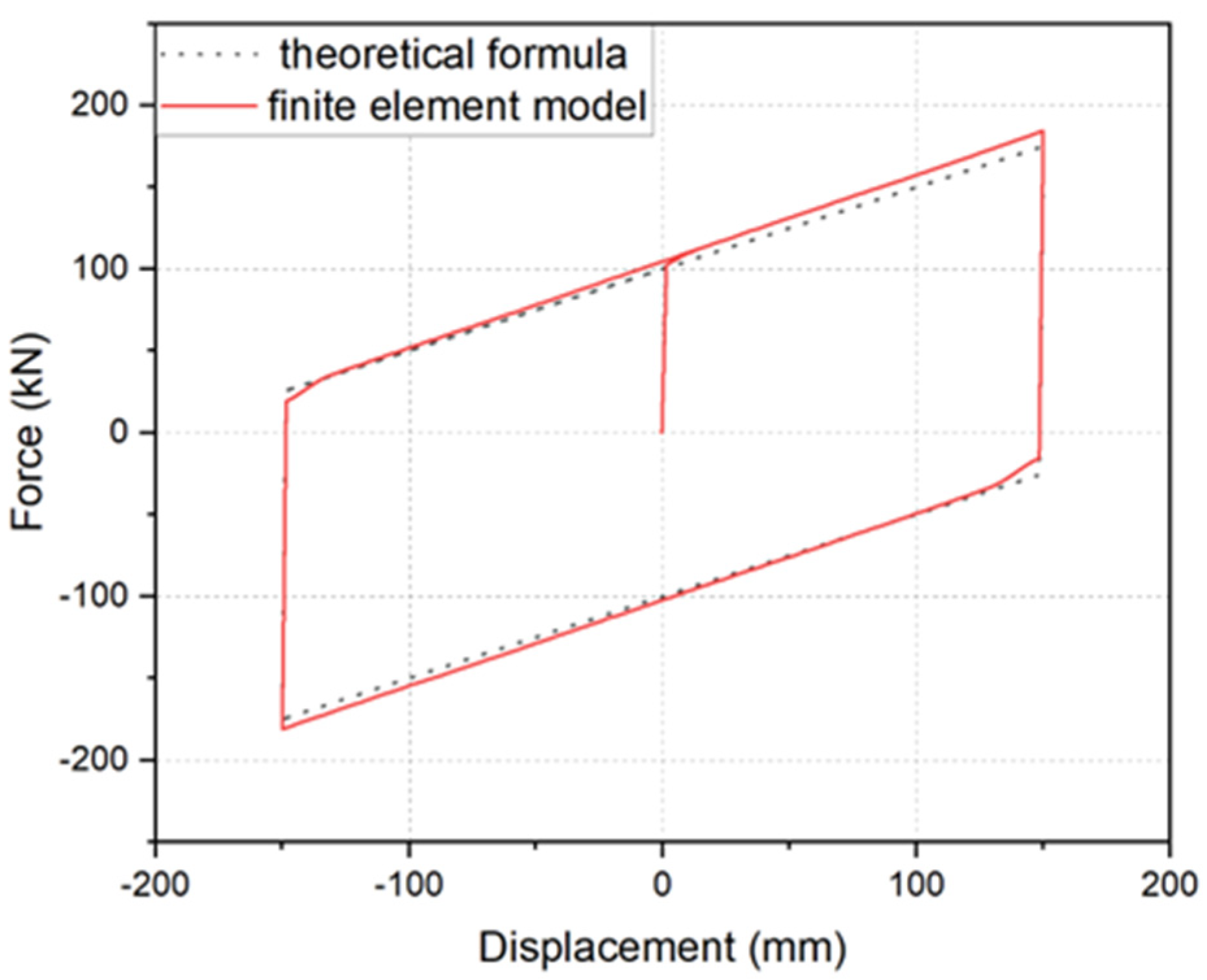
4.3. Accuracy Verification of the Simplified Model
5. Parameter Optimization of Friction Pendulum Bearings
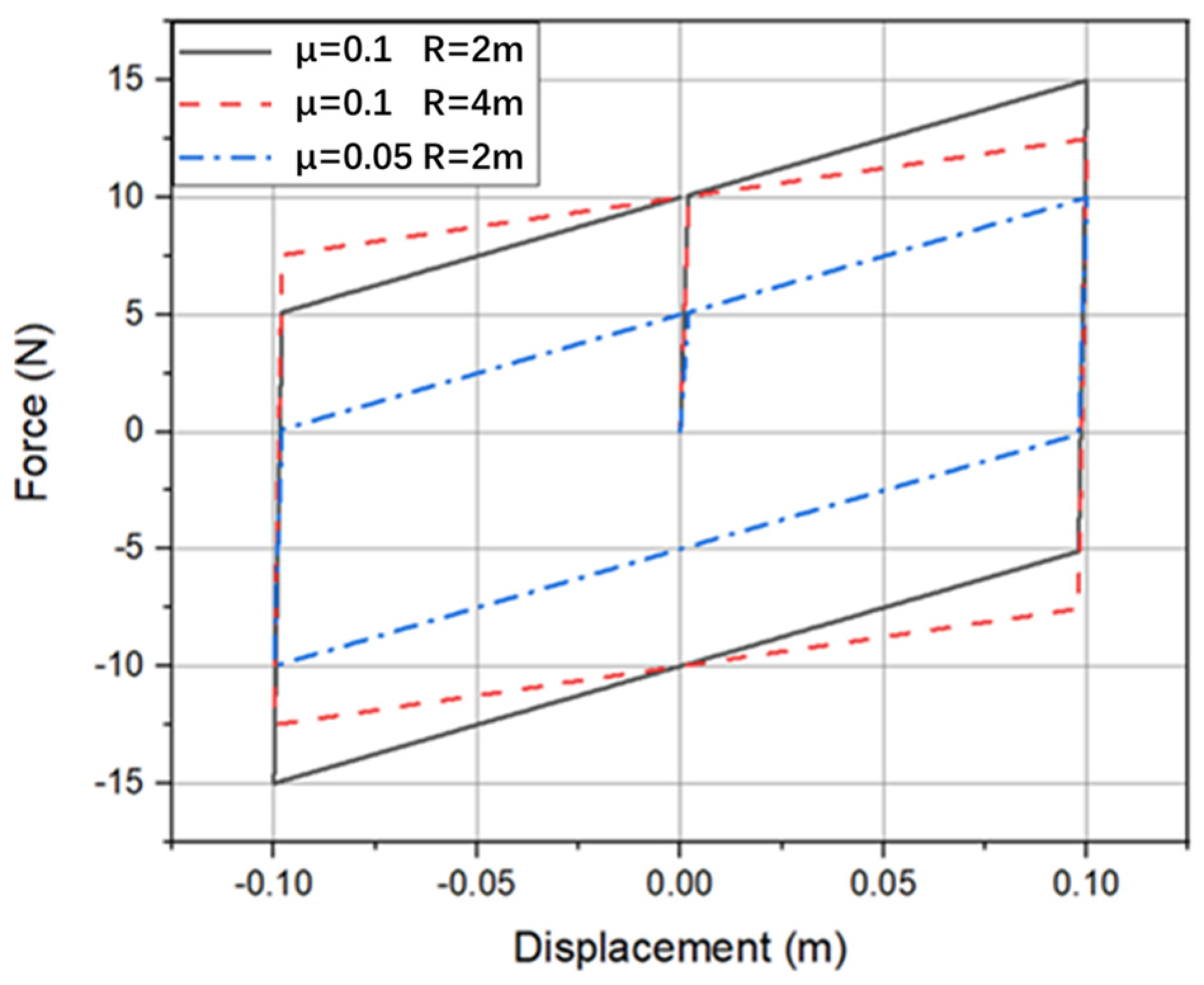
5.1. Key Parameters of Friction Pendulum Bearings
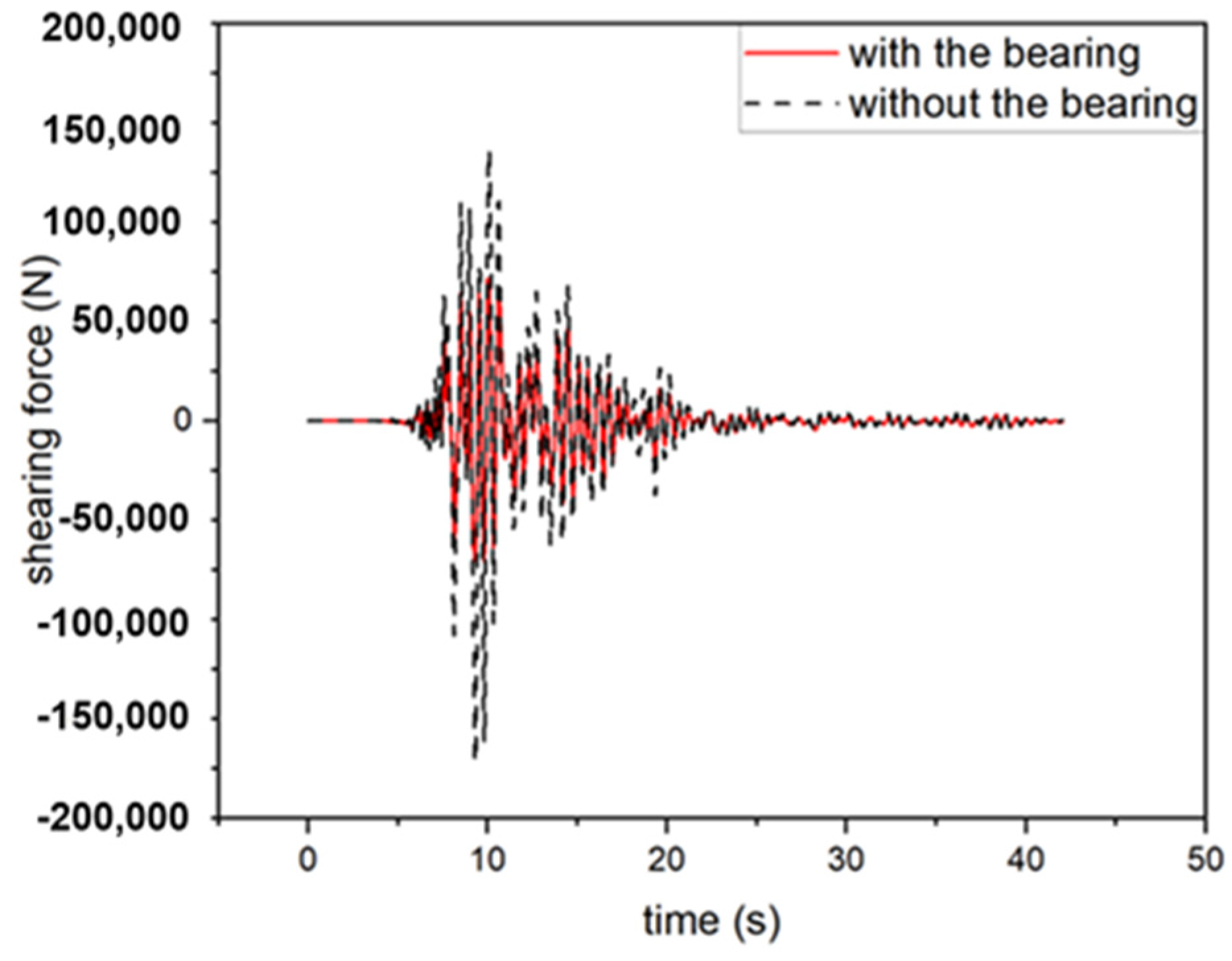
5.2. Seismic Reduction Effectiveness of Friction Pendulum Bearing
5.3. Parameter Optimization Based on the Improved Genetic Algorithm
6. Conclusions
- (1)
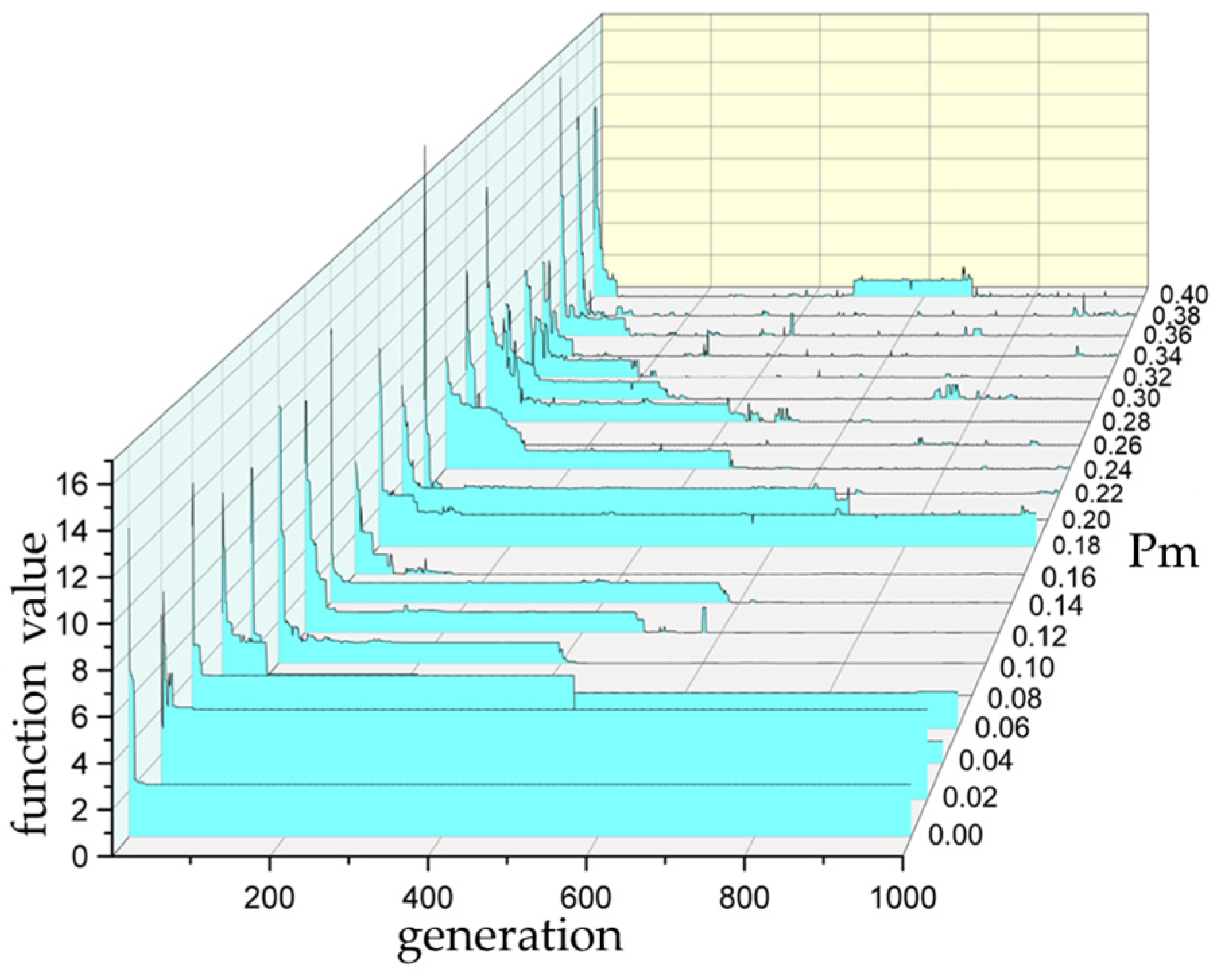
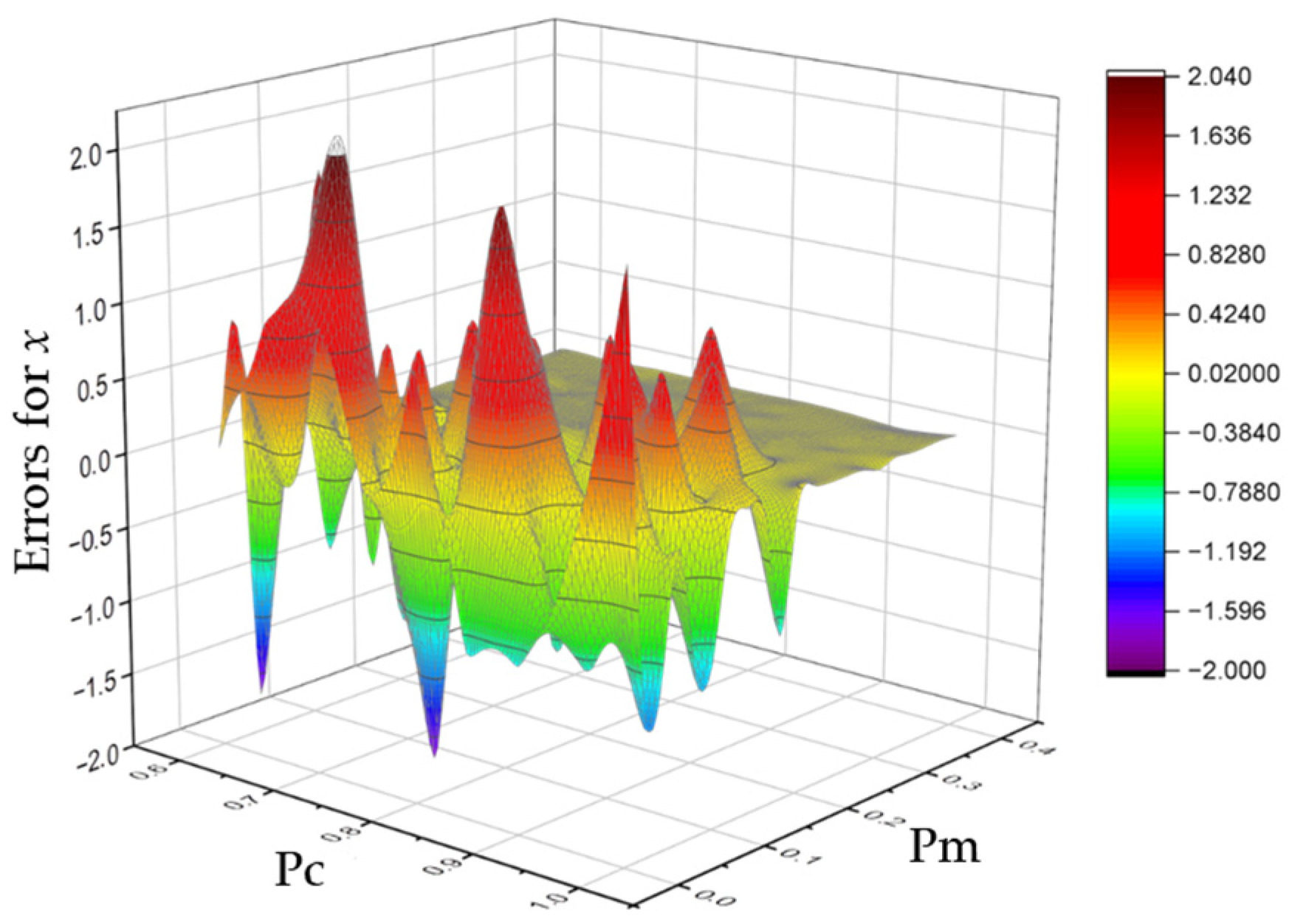
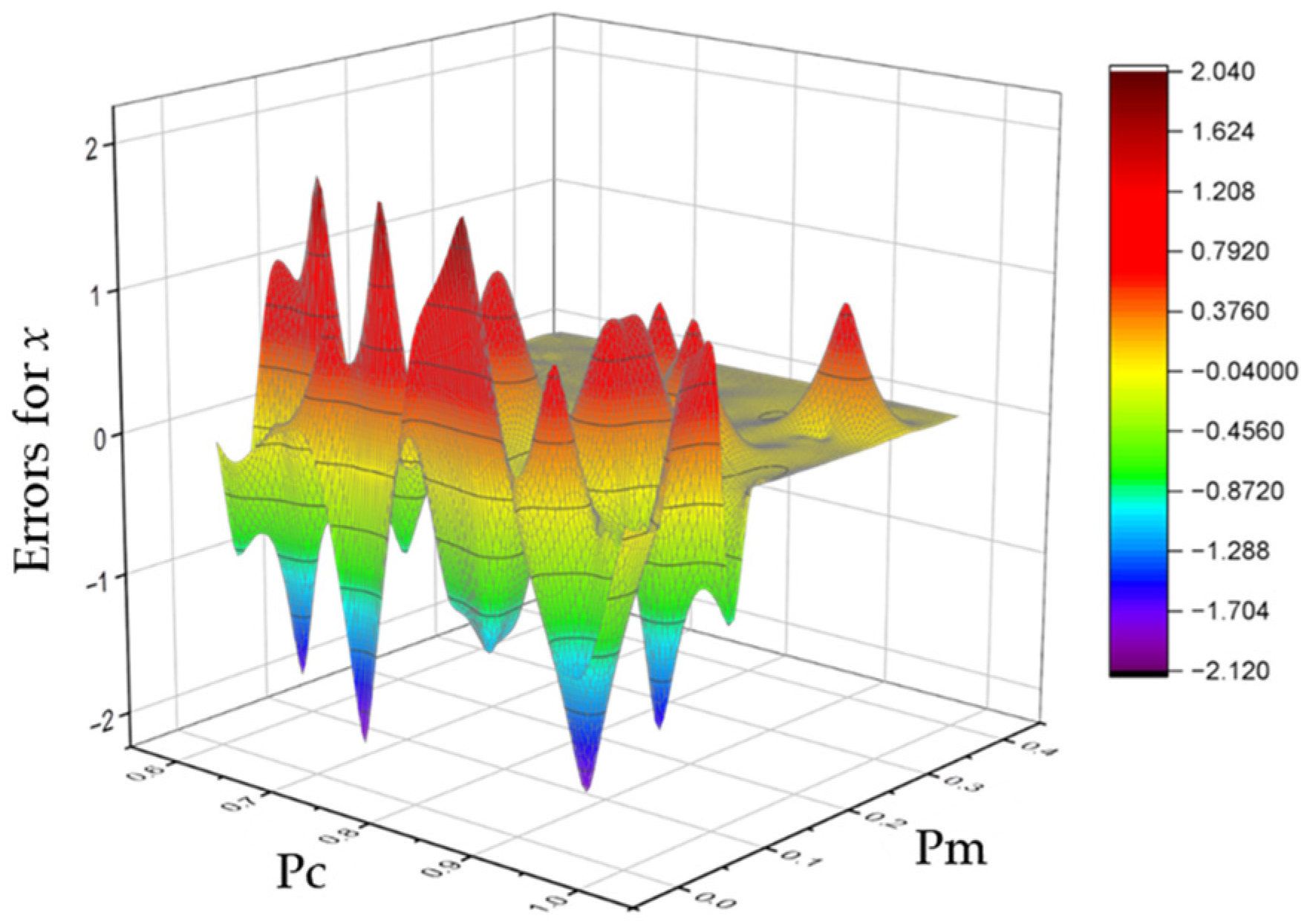
- When the Pc and Pm of the genetic algorithm are small, the algorithm converges quickly, and the optimization process is stable, but it is prone to converge to a local optimal solution rather than a global optimal solution. When the Pc and Pm are large, the randomness of spatial search is high, and the genes of excellent individuals are easily disrupted, making convergence difficult. Choosing appropriate values of Pc and Pm is crucial for the optimization ability of genetic algorithms.
- (2)
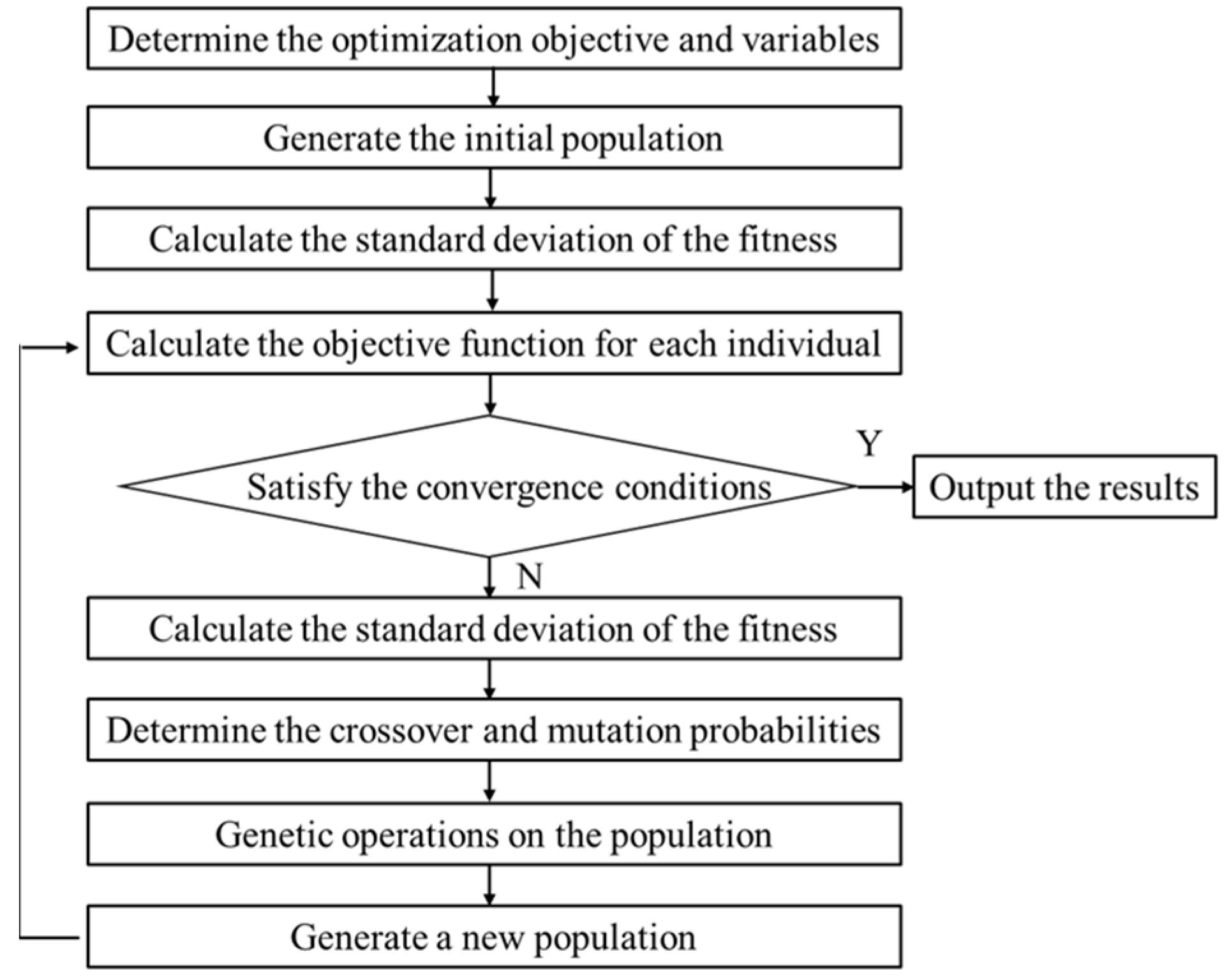
- Using population diversity as an evaluation metric, an adaptive genetic algorithm considering the overall evolutionary status is proposed. The algorithm dynamically adjusts the Pc and Pm based on the fitness of individuals and the diversity of the population. Comparing AGACO with other genetic algorithms validates that AGACO has better global search capability and convergence efficiency.
- (3)
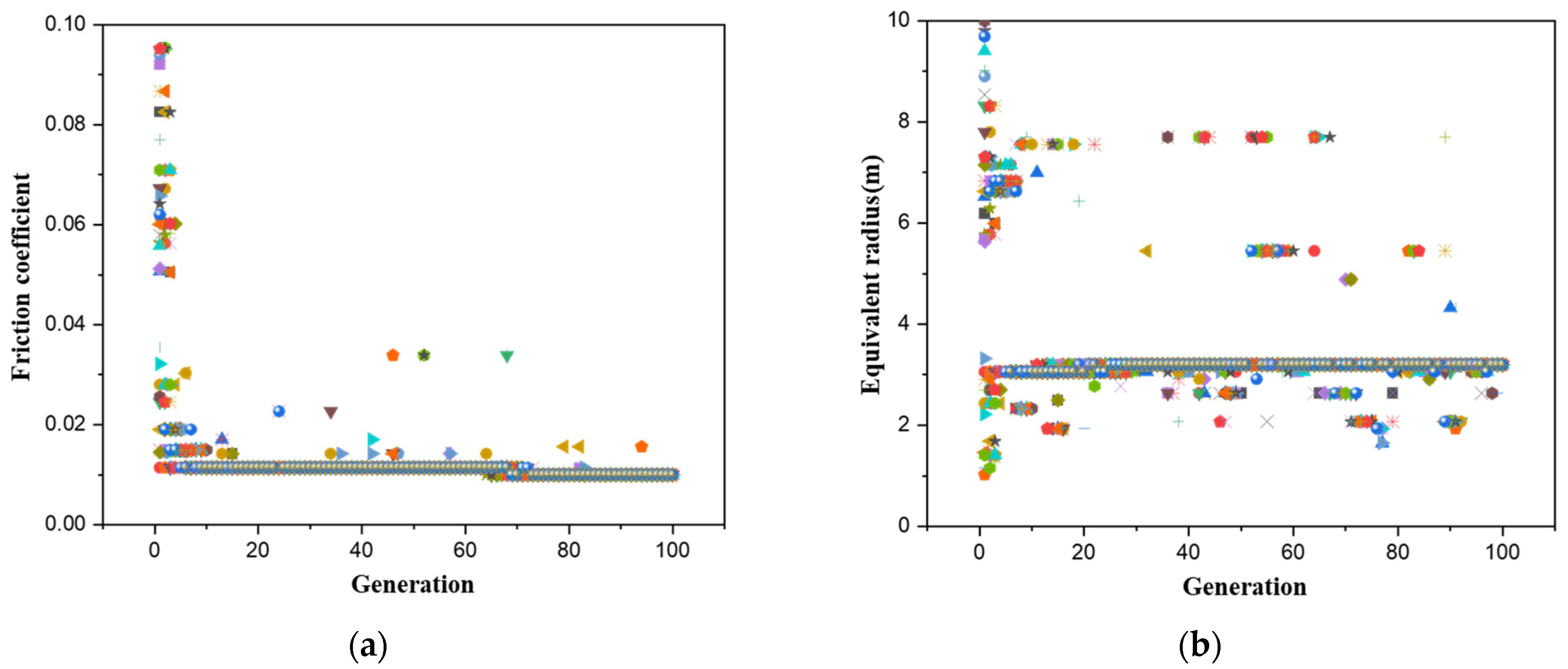
- Combining the improved genetic algorithm with the finite element model, a parameter optimization method is proposed. The parameters of friction pendulum bearings are optimized based on the optimization method. The optimal friction coefficient of the friction pendulum bearing is 0.01 and the optimal equivalent radius is 3.3 m. The optimization method proposed has universal applicability. It is applicable to various engineering optimization problems. But the optimization results are only applicable to the situations proposed in this paper.
- (4)
- The optimization results provide reference suggestions for the design of friction pendulum bearings in future. According to the process of parameter optimization, it can be found that the smaller the friction coefficient of the friction pendulum bearing, the better the seismic reduction effectiveness. Simultaneously, the existence of an optimal equivalent radius can maximize the seismic reduction effectiveness. In the future design of friction pendulum bearings, the friction coefficient should be minimized as much as possible. And the optimal equivalent radius can be found by the optimization method.
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Zheng, Z.J.; Wang, Z.L.; Liu, S.; Ma, W. Exploring the spatial effects on the level of congestion caused by traffic accidents in urban road networks: A case study of Beijing. Travel Behav. Soc. 2024, 35, 100728. [Google Scholar] [CrossRef]
- Chen, X.S.; Xu, Y.J.; Bai, X.; Chu, K.F. Exploration on the Comprehensive Planning Mode of Underground Space in High-density Urban Residential Areas. Chin. J. Undergr. Space Eng. 2022, 18, 1–11. [Google Scholar] [CrossRef]
- Broere, W. Urban underground space: Solving the problems of today’s cities. Tunn. Undergr. Space Technol. 2016, 55, 245–248. [Google Scholar] [CrossRef]
- Qiao, Y.K.; Peng, F.L.; Sabri, S.; Rajabifard, A. Low carbon effects of urban underground space. Sustain. Cities Soc. 2019, 45, 451–459. [Google Scholar] [CrossRef]
- Chen, Z.Y.; Fan, H.; Bian, G.Q. Parameter Analysis of Shear Panel Dampers under High Axial Compression. Adv. Steel Constr. 2015, 11, 1–14. [Google Scholar] [CrossRef]
- Liu, Z.Q.; Chen, Z.Y.; Liang, S.B.; Li, C.X. Isolation mechanism of a subway station structure with flexible devices at column ends obtained in shaking-table tests. Tunn. Undergr. Space Technol. 2020, 98, 103328. [Google Scholar] [CrossRef]
- Chen, Z.Y.; Jia, P. Seismic response of underground stations with friction pendulum bearings under horizontal and vertical ground motions. Soil Dyn. Earthq. Eng. 2021, 151, 106984. [Google Scholar] [CrossRef]
- Zhuang, H.Y.; Zhao, C.; Chen, S.; Fu, J.S.; Zhao, K.; Chen, G.X. Seismic performance of underground subway station with sliding between column and longitudinal beam. Tunn. Undergr. Space Technol. 2020, 102, 103439. [Google Scholar] [CrossRef]
- Chen, Z.Y.; Jia, P.; Liu, Z.Q. Parameter analysis of friction pendulum bearings in underground stations during the earthquake. China Civ. Eng. J. 2022, 55, 12–22. [Google Scholar] [CrossRef]
- Zhou, Y. Resilience-Based Seismic Mitigation Measure and Optimal Layout for Subway Stations. Master’s Thesis, Tongji University, Shanghai, China, 2020. [Google Scholar]
- Di Trapani, F.; Malavisi, M.; Marano, G.C.; Sberna, A.P.; Greco, R. Optimal seismic retrofitting of reinforced concrete buildings by steel-jacketing using a genetic algorithm-based framework. Eng. Struct. 2020, 219, 110864. [Google Scholar] [CrossRef]
- Bekdaş, G.; Nigdeli, S.M.; Yang, X.S. A novel bat algorithm based optimum tuning of mass dampers for improving the seismic safety of structures. Eng. Struct. 2018, 159, 89–98. [Google Scholar] [CrossRef]
- Bagley, J.D. The Behavior of Adaptive Systems Which Employ Genetic and Correlation Algorithms. Ph.D. Thesis, University of Michigan, Ann Arbor, MI, USA, 1967. [Google Scholar]
- Rastrigin, L.A. Random Search in Problems of Optimization, Identification and Training of Control Systems. J. Cybern. 1974, 3, 93–103. [Google Scholar] [CrossRef]
- Srinivas, M.; Patnaik, L.M. Adaptive probabilities of crossover and mutation in genetic algorithms. IEEE Trans. Syst. Man. Cybern. 1994, 24, 656–667. [Google Scholar] [CrossRef]
- Sung, W.; Hsiao, C. IHPG algorithm for efficient information fusion in multi-sensor network via smoothing parameter optimization. Informatica 2013, 24, 291–313. [Google Scholar] [CrossRef]
- Song, J.; Hou, C.; Xue, G.; Ma, M. Study of Constellation Design of Pseudolites Based on Improved Adaptive Genetic Algorithm. J. Commun. 2016, 11, 879–885. [Google Scholar] [CrossRef]
- Yan, M.; Hu, H.; Otake, Y.; Taketani, A.; Wakabayashi, Y.; Yanagimachi, S.; Wang, S.; Pan, Z.; Hu, G. Improved adaptive genetic algorithm with sparsity constraint applied to thermal neutron CT reconstruction of two-phase flow. Meas. Sci. Technol. 2018, 29, 055404. [Google Scholar] [CrossRef]
- Wang, L.L. Research on emergency management capability evaluation of hazardous chemical supply chain. Chem. Eng. Trans. 2017, 62, 1369–1374. [Google Scholar] [CrossRef]
- Patil, V.P.; Pawar, D.D. The optimal crossover or mutation rates in genetic algorithm: A review. Int. J. Appl. Eng. Technol. 2015, 5, 38–41. [Google Scholar]
- Hiroomi, I.; Toshio, H.; Nozomu, Y.; Masahiko, I. Damage to Daikai Subway Station. Soils Found. 1996, 36, 283–300. [Google Scholar] [CrossRef]
- Nguyen, V.Q.; Nizamani, Z.A.; Park, D.; Kwon, O.S. Numerical simulation of damage evolution of Daikai station during the 1995 Kobe earthquake. Eng. Struct. 2020, 206, 283–300. [Google Scholar] [CrossRef]
- Shang, J.; Tan, P.; Zhang, Y.; Han, J.; Mi, P. Seismic isolation design of structure using variable friction pendulum bearings. Soil Dyn. Earthq. Eng. 2021, 148, 106855. [Google Scholar] [CrossRef]
- Rayegani, A.; Nouri, G. Application of smart dampers for prevention of seismic pounding in isolated structures subjected to near-fault earthquakes. J. Earthq. Eng. 2022, 26, 4069–4084. [Google Scholar] [CrossRef]
- Rayegani, A.; Nouri, G. Seismic collapse probability and life cycle cost assessment of isolated structures subjected to pounding with smart hybrid isolation system using a modified fuzzy based controller. Structures 2022, 44, 30–41. [Google Scholar] [CrossRef]
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Soil Type | Thickness (m) | Density (kN/m3) | Shear Wave Velocity (m/s) | Poisson’s Ratio | Dynamic Modulus of Elasticity (Mpa) |
|---|---|---|---|---|---|
| Clay | 1 | 19 | 140 | 0.333 | 99.3 |
| Sand | 4.1 | 19 | 140 | 0.488 | 111 |
| Sand | 3.2 | 19 | 170 | 0.493 | 164 |
| Clay | 3.1 | 19 | 190 | 0.494 | 205 |
| Clay | 5.8 | 19 | 240 | 0.49 | 326 |
| Sand | 22 | 20 | 330 | 0.487 | 648 |
| Acceleration Amplitude | 0.1 g | 0.2 g | 0.4 g |
|---|---|---|---|
| Without bearing | 88 kN | 172 kN | 346 kN |
| With bearing | 50 kN | 71 kN | 96 kN |
| Seismic reduction effectiveness | 43% | 59% | 72% |
| = 0.01 | = 0.02 | = 0.03 | = 0.04 | |
|---|---|---|---|---|
| R = 1 m | 50 kN | 75 kN | 96 kN | 101 kN |
| R = 2 m | 42 kN | 71 kN | 95 kN | 101 kN |
| R = 3 m | 41 kN | 71 kN | 95 kN | 101 kN |
| R = 4 m | 43 kN | 73 kN | 95 kN | 101 kN |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yin, G.; Ma, M.; Jia, P.; Ma, X. Parameter Optimization of Friction Pendulum Bearings Based on the Adaptive Genetic Algorithm Considering the Overall Evolutionary Status. Buildings 2024, 14, 435. https://doi.org/10.3390/buildings14020435
Yin G, Ma M, Jia P, Ma X. Parameter Optimization of Friction Pendulum Bearings Based on the Adaptive Genetic Algorithm Considering the Overall Evolutionary Status. Buildings. 2024; 14(2):435. https://doi.org/10.3390/buildings14020435
Chicago/Turabian StyleYin, Guanghua, Minglei Ma, Peng Jia, and Xinxu Ma. 2024. "Parameter Optimization of Friction Pendulum Bearings Based on the Adaptive Genetic Algorithm Considering the Overall Evolutionary Status" Buildings 14, no. 2: 435. https://doi.org/10.3390/buildings14020435
APA StyleYin, G., Ma, M., Jia, P., & Ma, X. (2024). Parameter Optimization of Friction Pendulum Bearings Based on the Adaptive Genetic Algorithm Considering the Overall Evolutionary Status. Buildings, 14(2), 435. https://doi.org/10.3390/buildings14020435