
Simulation Test of an Intelligent Vibration System for Concrete under Reinforcing Steel Mesh
Abstract
:1. Introduction
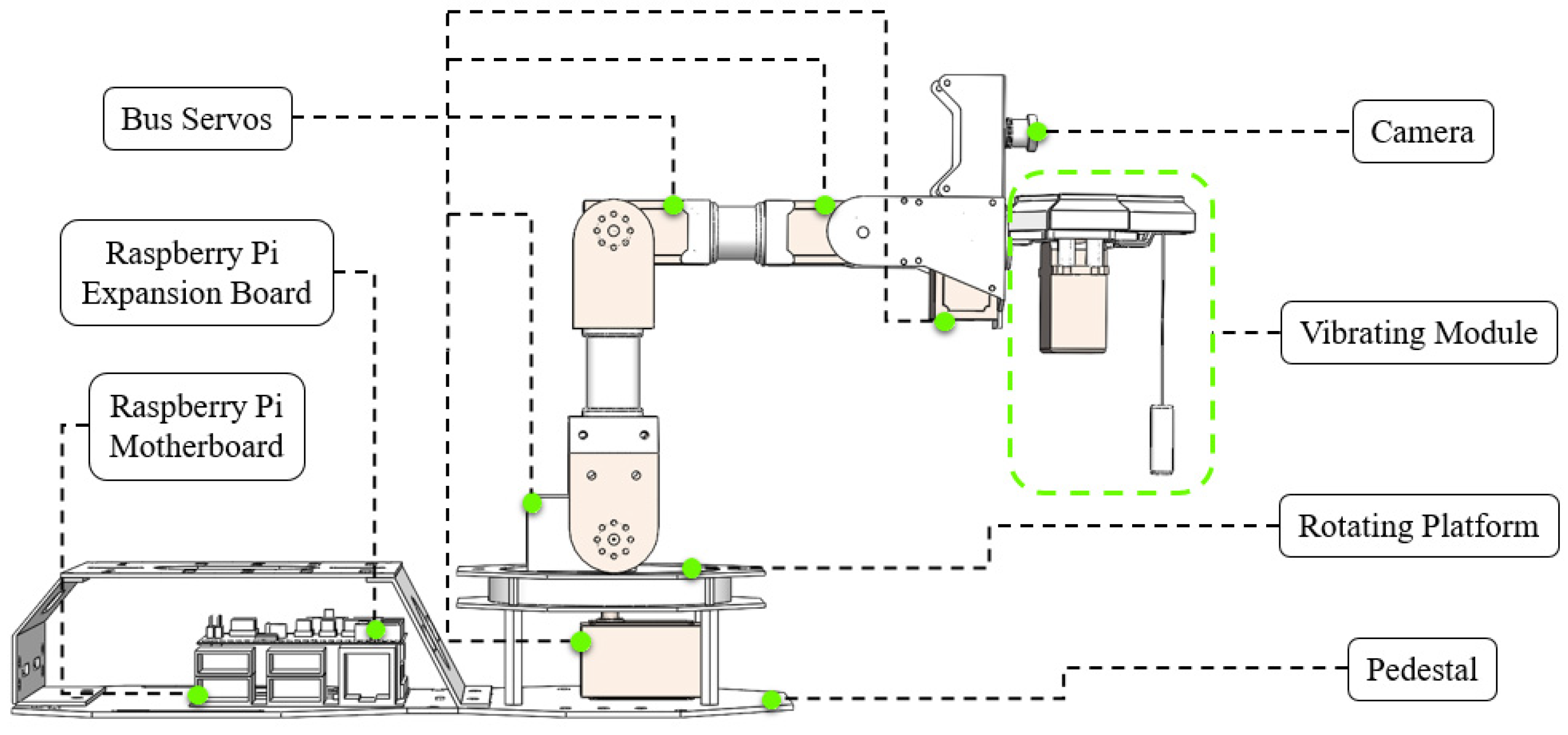
2. Vibrating Robot Arm System
2.1. Vibro-Module
2.2. Structural Model of the Vibrating Robot Arm
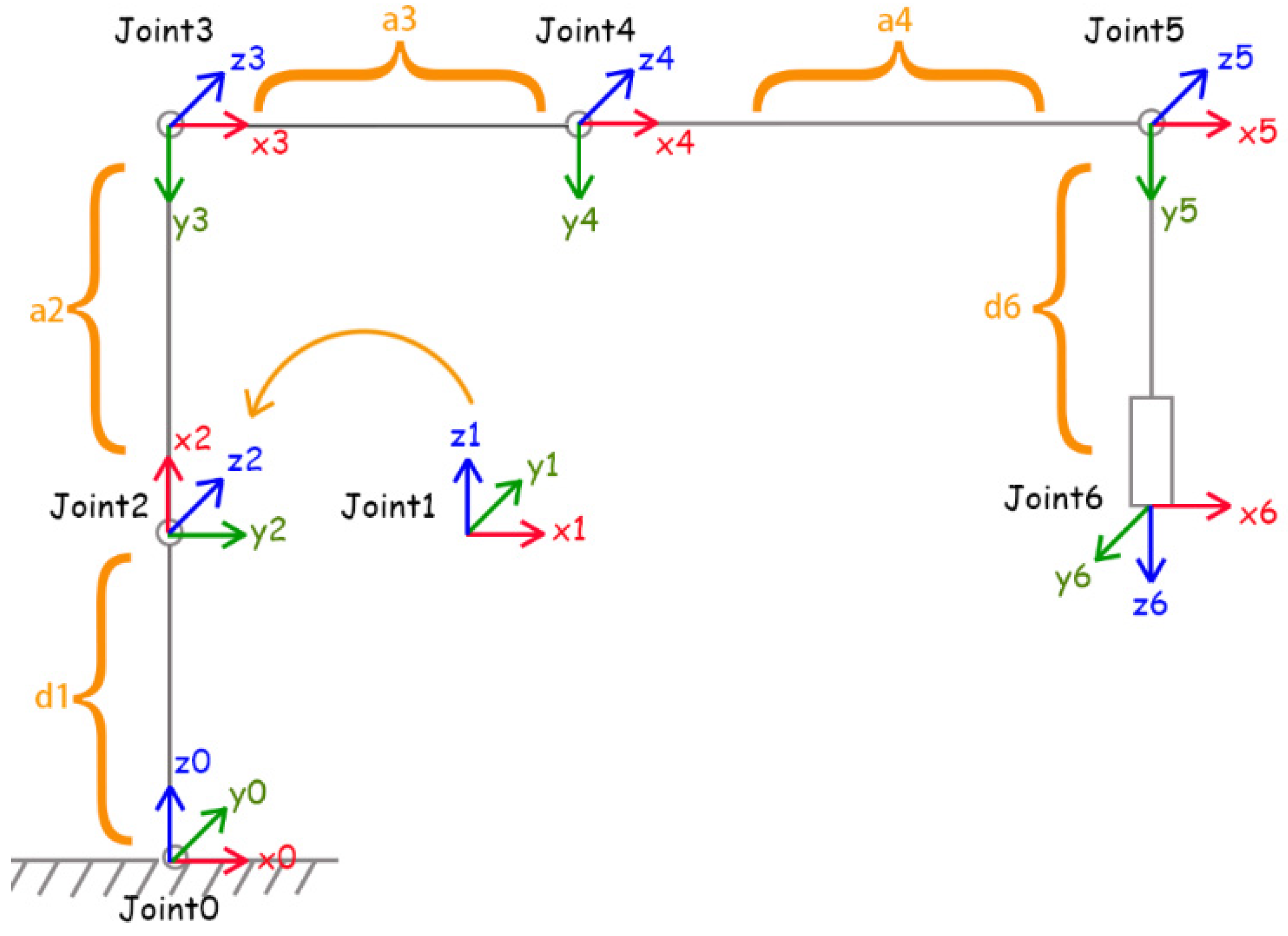
2.2.1. Model Space Description
2.2.2. Forward Kinematics
2.2.3. Inverse Kinematics
3. Machine Vision Integration Algorithms
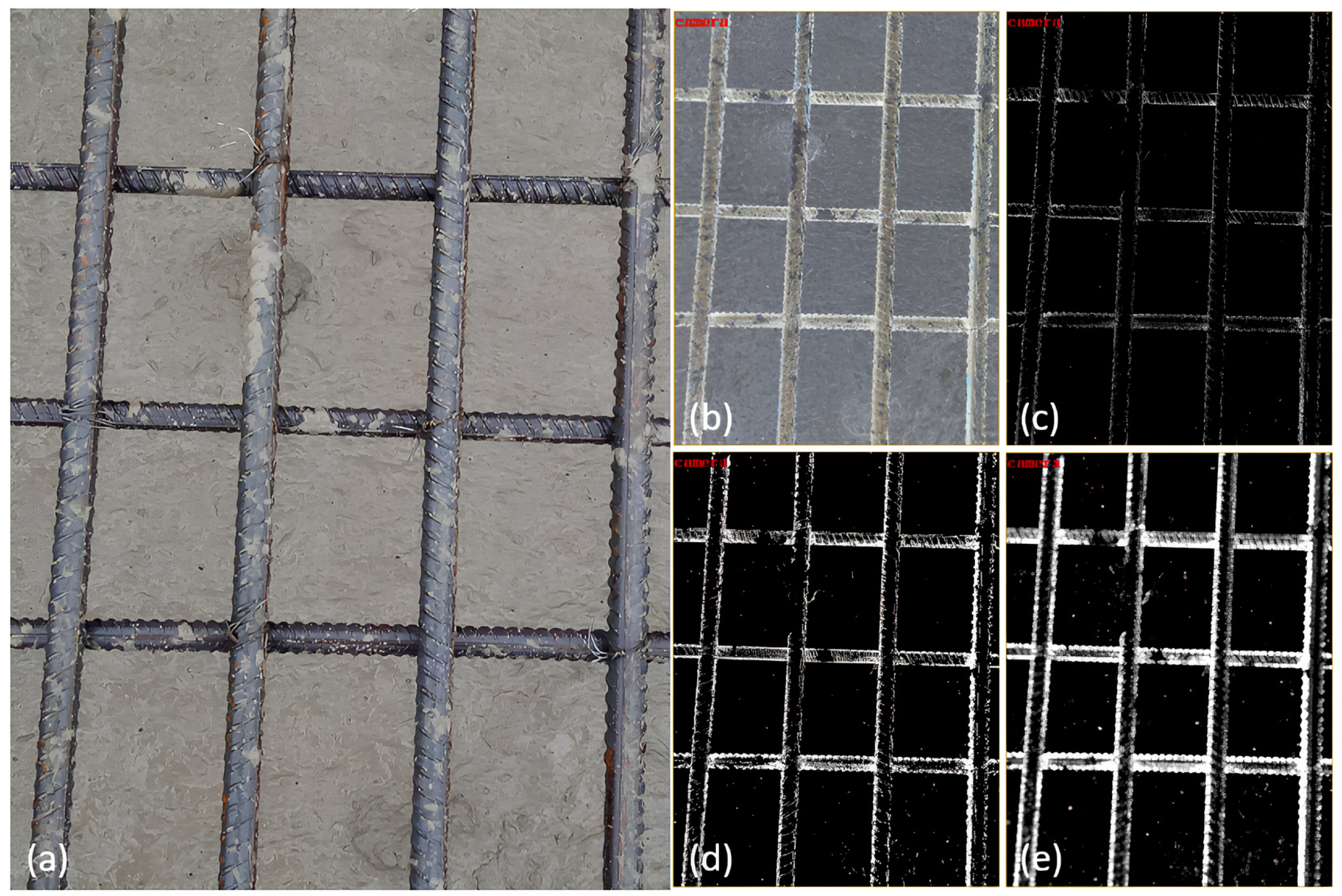
3.1. Rebar Grid Center Point Identification
3.2. Batch Coordinate Conversion and Screening
3.3. Vibratory Quality Judgement Model
Modeling of Vibratory Quality Determination
4. Simulation Tests
5. Conclusions
- (1)
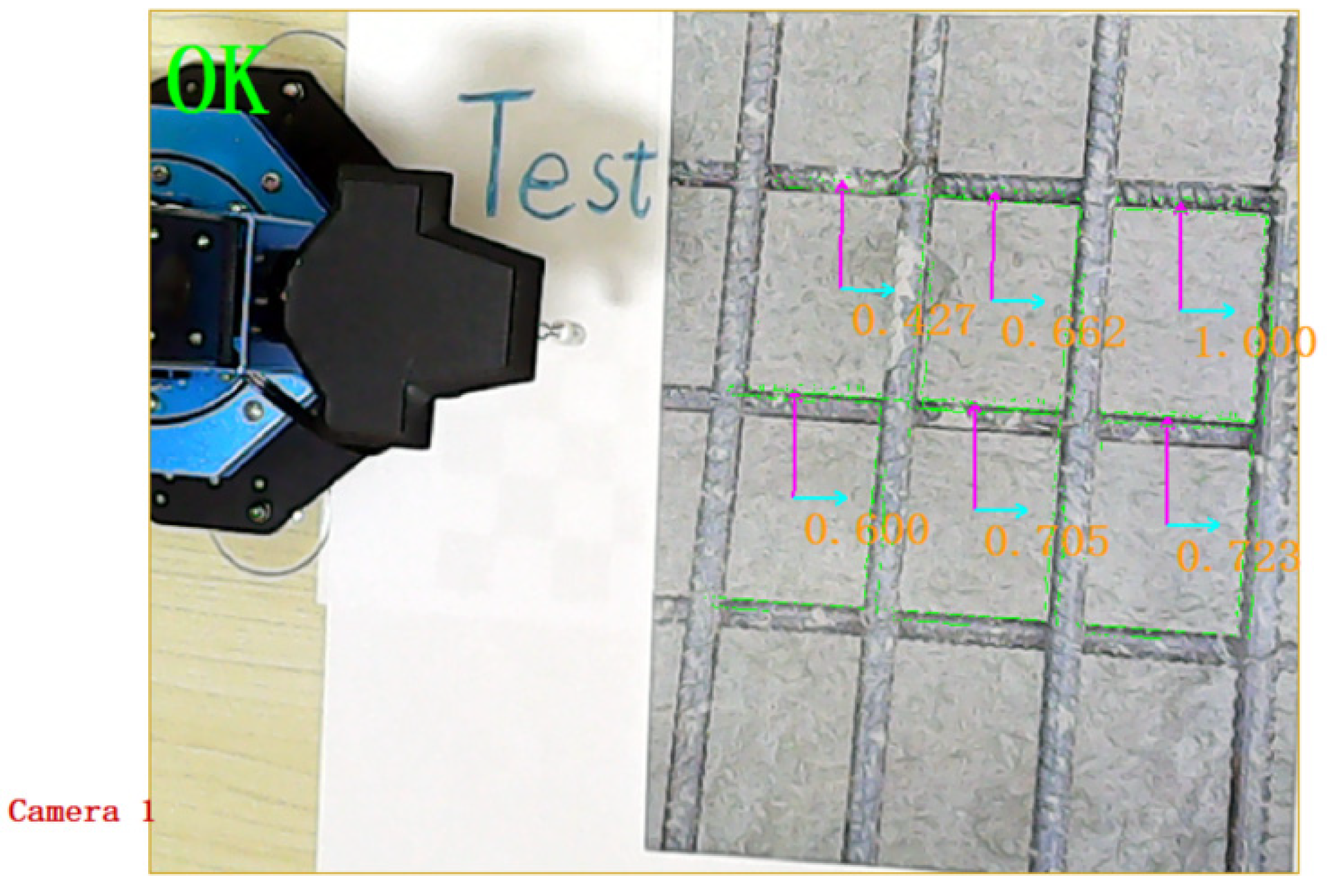
- Automatic acquisition of the center point coordinates of the rebar grid in the workspace is obtained. Batch gathering of pixel coordinates and batch conversion of the rebar mesh point coordinates are accomplished through machine vision integration algorithms.
- (2)
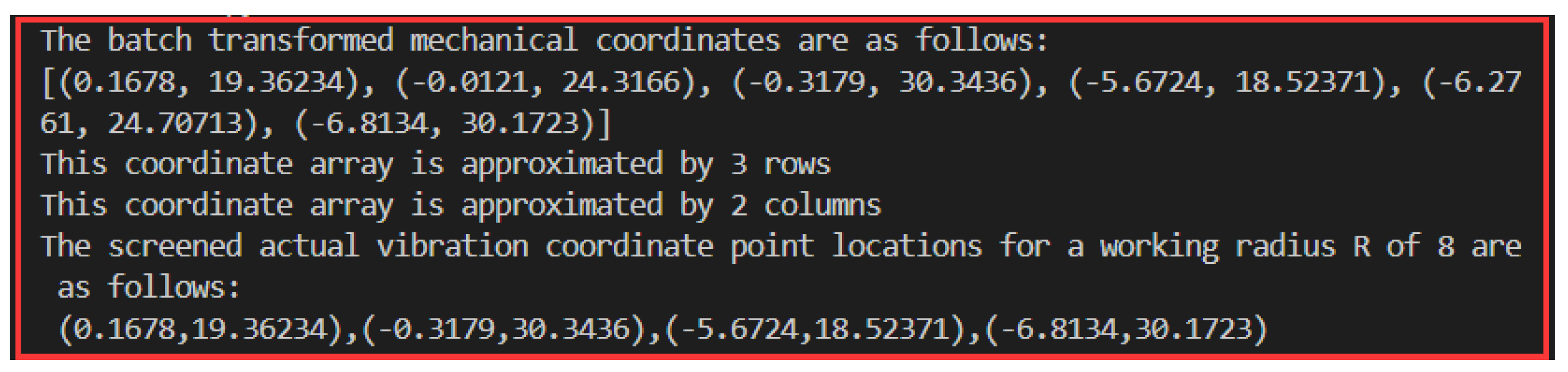
- Automated screening of precise vibration point locations within the workspace is accomplished. The vibration point screening algorithm ensures compliance with the specified insertion spacing for adjacent vibration points.
- (3)
- The vibrator’s vertical attitude remains constant during operation. The vibro-module fulfills the specifications for vertical insertion and extraction of the vibrator, while also preventing collisions with the reinforcement formwork.
- (4)
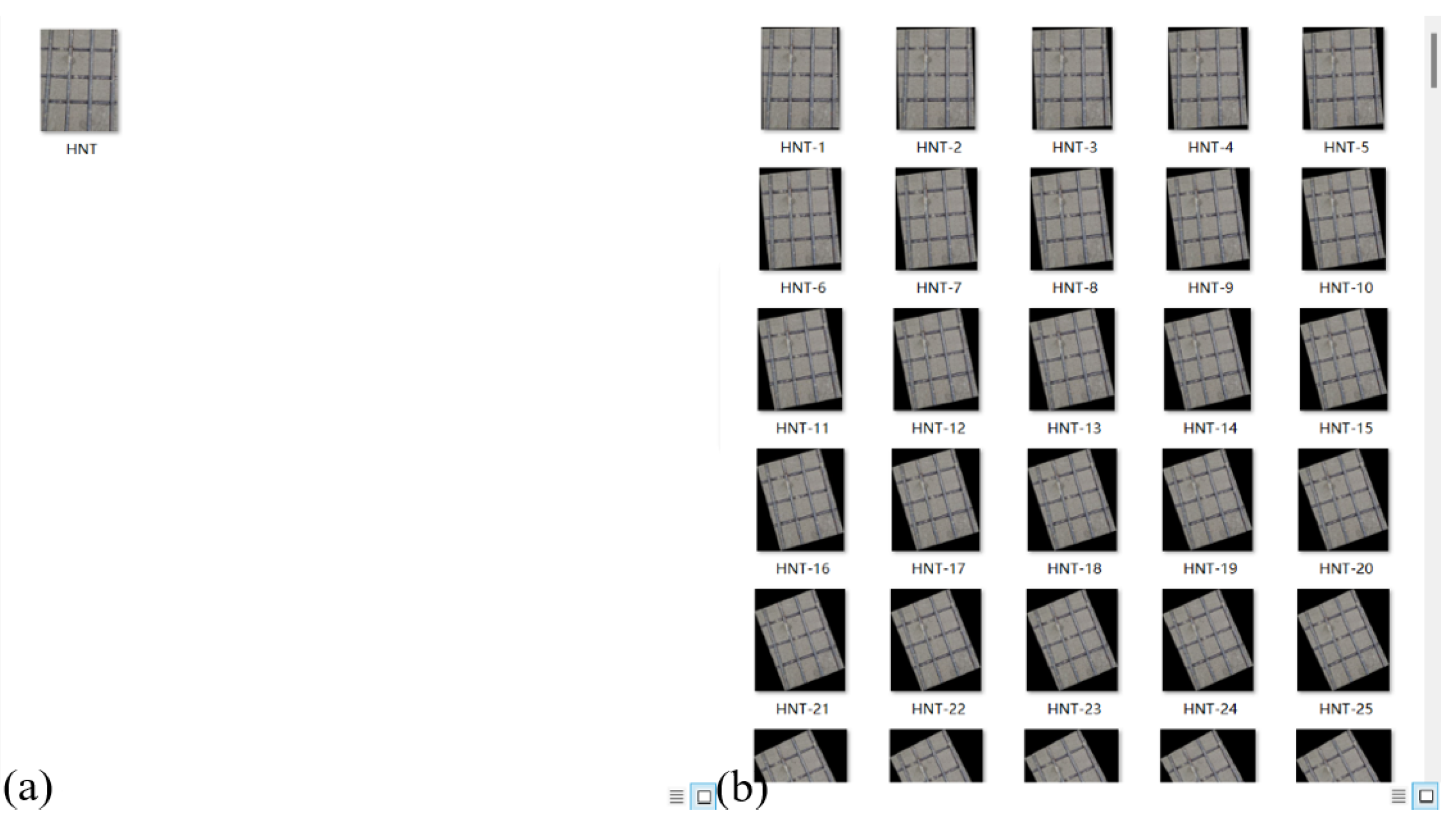
- Automated assessment of vibration quality is conducted. Utilizing the YOLOv5 target detection model enables real-time evaluation of vibration quality during the vibration process, enhancing quality control standards while mitigating the unpredictability and delays associated with conventional quality assessment methods.
- (5)
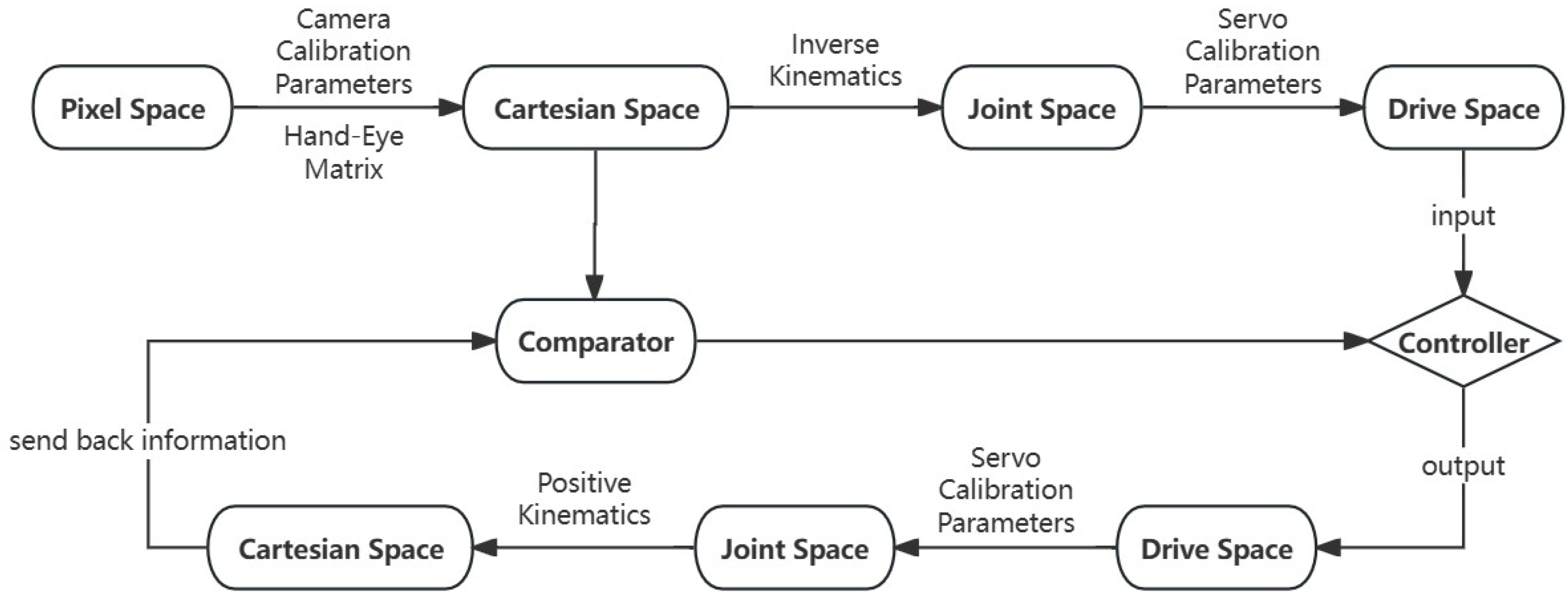
- Through the closed-loop control of the spatial transformation of the vibrating robotic arm system, the accuracy of the actual operation results of the vibrating robotic arm system is improved.
- (6)
- The feasibility of the vibrating robotic arm system in intelligent vibration of concrete under reinforcing steel mesh is verified through simulation tests.
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Tian, Z.H.; Ma, Y.S.; Li, J.J. Research progress on concrete vibration compactness. J. Constr. Mater. 2024, 27, 46–57. [Google Scholar] [CrossRef]
- Basler, F.; Mähner, D.; Fischer, O.; Hilbig, H. Influence of early-age vibration on concrete strength. Struct. Concr. 2023, 24, 6505–6519. [Google Scholar] [CrossRef]
- Hu, J.; Qin, M.Q.; Wang, H.W.; Liu, K.X. Study on the influence law of vibration frequency on the performance of concrete. Highway 2020, 65, 111–112. [Google Scholar]
- Wen, J.X.; Huang, F.L.; Wang, Z.; Yi, Z.; Xie, Y.; Li, H.; Cheng, H. Research status and development trend of concrete vibration technology. Silic. Bull. 2021, 40, 3326–3336. [Google Scholar] [CrossRef]
- Yuan, Y.S.; Tian, Z.H.; Xu, X.B.; Liu, H.R.; Li, J.J.; Fan, H.Y. Research on response parameters and classification identification method of concrete vibration process. Materials 2023, 16, 2958. [Google Scholar] [CrossRef] [PubMed]
- Quan, Y.H.; Wang, F.L. Machine learning-based real-time tracking for concrete vibration. Autom. Constr. 2022, 140, 4343. [Google Scholar] [CrossRef]
- Gong, J.; Yu, Y.; Raghav, K.; Andrés, R. Real-time tracking of concrete vibration effort for intelligent concrete consolidation. Autom. Constr. 2015, 54, 12–24. [Google Scholar] [CrossRef]
- Han, J.G.; Wang, K.J.; Wang, X.H.; Paulo, J.M.M. 2D image analysis method for evaluating coarse aggregate characteristic and distribution in concrete. Constr. Build. Mater. 2015, 127, 30–42. [Google Scholar] [CrossRef]
- Liu, J. Development of a Stereo Vision Based Concrete Vibrating Quality Monitoring System. Master’s Dissertation, Harbin Institute of Technology, Harbin, China, 2018. [Google Scholar]
- Pierre, B.; Jean-Marie, G.; Younés, H. On-site concrete segregation estimation using image analysis. J. Adv. Concr. Technol. 2008, 6, 171–180. [Google Scholar] [CrossRef]
- Sheng, Y.S.; Fan, Q.X.; Wang, Z.L.; Chen, W.; Guo, Z.; Lin, E.; Lin, P.; Zhou, T.; Zhou, M.; Liu, C.; et al. Intelligent construction technology and application practice of Baihetan extra-high arch dam. J. Tsinghua Univ. (Nat. Sci. Ed.) 2021, 61, 694–704. [Google Scholar] [CrossRef]
- Jin, Y.; Pan, J.Z.; Zhong, L.; Han, Y.; Zhou, G.; Gao, X. Study on rheology and bubble structure of fresh concrete under vibration. Silic. Bull. 2023, 42, 3866–3877. [Google Scholar] [CrossRef]
- Zhong, G.L.; Xu, J.J.; Qiao, Y.; Zhu, Y.; Zhang, Z. Research and application of key technology for intelligent monitoring of concrete vibration quality. Water Conserv. Hydropower Technol. 2020, 51, 422–426. [Google Scholar] [CrossRef]
- Yang, N.; Li, J.; Zhou, S.W.; Liu, Y.Y.; Zhong, G.L. Research and application of intelligent control technology of concrete vibration for high arch dam. China Rural Water Conserv. Hydropower 2018, 8, 176–178, 185. [Google Scholar]
- Tian, Z.H.; Bian, C.; Mao, L.; Wu, Y.J. Development of dynamic visualization monitoring system for concrete vibration. J. Build. Mater. 2013, 16, 508–513. [Google Scholar]
- Li, Z.W.; Zhang, S.P.; Niu, Y.Z.; Li, Y. Concrete vibration technology and intelligent development of precast box girder for high speed rail. J. Railw. Sci. Eng. 2024, 39, 1–10. [Google Scholar] [CrossRef]
- Zhong, D.H.; Shen, Z.Y.; Wang, J.J.; Cui, B.; Ren, B.; Wang, D. Research on dynamic evaluation of concrete dam vibration construction quality based on real-time monitoring. J. Water Resour. 2018, 49, 775–786. [Google Scholar] [CrossRef]
- Lee, S.G.; Skibniewski, M.J. Monitoring of concrete placement and vibration for real-time quality control. Proc. Creat. Constr. Conf. 2019, 011, 67–76. [Google Scholar] [CrossRef]
- Yangtze River Institute of Surveying, Planning and Design. Specification for Hydraulic Concrete Construction; China Water Conservancy and Hydropower Press: Beijing, China, 2014. [Google Scholar]
- China Electricity Council. Hydraulic Concrete Construction Specification; China Electric Power Press: Beijing, China, 2015. [Google Scholar]
- Chu, Y.D.; Li, C.G.; Chen, F.X.; Wang, J.; Yue, Y.S. A review on the development of concrete leveling vibrating machine. Water Conserv. Hydropower Technol. 2020, 51, 99–110. [Google Scholar] [CrossRef]
- Zhong, D.H.; Ren, B.Y.; Song, W.S.; Wu, B.; Guan, T.; Tong, D. Research on key technology of intelligent control of progress and quality of high arch dam construction and its application. Water Conserv. Hydropower Technol. 2020, 50, 8–17. [Google Scholar] [CrossRef]
- Li, M.; Li, C.G.; Qian, H.W.; Chu, Y.D. Trajectory planning of a concrete vibration robot in the reinforcing steel mesh of dam face. Mach. Electron. 2023, 41, 61–65. [Google Scholar]
- Wang, D.; Guan, T.; Yang, S.A.; Wang, X.; Zhai, H.; Ren, B. Intelligent monitoring of concrete vibration quality under air-ground integrated sensing. J. Silic. 2023, 51, 1219–1227. [Google Scholar] [CrossRef]
- Wang, X.L.; Wang, D.; Ren, B.Y.; Chen, W.F.; Tan, Y.S.; Guan, T. Development and application of concrete vibration robot system for high arch dams. J. Water Resour. 2022, 53, 631–643, 654. [Google Scholar] [CrossRef]
- Zhao, C.; Gao, S.Q.; Wang, J.Y.; Li, X.; Wang, S. Research on rapid construction technology of large volume pier body based on automated lifting. Build. Struct. 2023, 53, 2003–2008. [Google Scholar] [CrossRef]
- Deng, K.D.; Qiang, S.; Jiang, Y.B.; Xu, C.L.; Hua, X. Modeling and development of unmanned transportation and pouring system for hydraulic large volume concrete. Hydropower Energy Sci. 2022, 40, 175–179. [Google Scholar] [CrossRef]
- Yu, Z.; Ren, H.H.; Qin, Q.P.; Hu, K. Kinematic analysis and trajectory planning of welding robot for complex spatial paths. J. Wuhan Univ. Sci. Technol. 2023, 46, 384–392. [Google Scholar] [CrossRef]
- SG, Vision 4.1; Mooklab Technology Ltd: China. January 2023. Available online: https://www.mooklab.cn/SGVision (accessed on 27 March 2024).
- Zhang, Z.P.; Qiang, S.; Zheng, Z.X.; Du, R.N.; Ding, B.Y. Design of automatic vibration system for reinforced concrete based on STM32 and OPENMV. Autom. Technol. Appl. 2020, 39, 181–183, 186. [Google Scholar]
- Ren, Y.M.; Zhang, Y.N.; Li, Y. Research progress and outlook of compressed perception and its image processing applications. J. Autom. 2014, 40, 1563–1575. [Google Scholar] [CrossRef]
- Liu, L.J.; Zhang, M.S.; Liu, W.H.; Zhou, D. G-YOLO: An embedded small target defect detection algorithm based on improved YOLOv5. J. Hangzhou Norm. Univ. (Nat. Sci. Ed.) 2024, 23, 201–208. [Google Scholar] [CrossRef]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| ) | ||||
|---|---|---|---|---|
| 1 | 0 | 0 | ||
| 2 | 0 | 0 | ||
| 3 | 0 | 0 | ||
| 4 | 0 | 0 | ||
| 5 | 0 | 0 | 0 | |
| 6 | 0 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liang, H.; Wu, Z.; Hu, J.; Gan, Y.; Qiang, S. Simulation Test of an Intelligent Vibration System for Concrete under Reinforcing Steel Mesh. Buildings 2024, 14, 2277. https://doi.org/10.3390/buildings14082277
Liang H, Wu Z, Hu J, Gan Y, Qiang S. Simulation Test of an Intelligent Vibration System for Concrete under Reinforcing Steel Mesh. Buildings. 2024; 14(8):2277. https://doi.org/10.3390/buildings14082277
Chicago/Turabian StyleLiang, Hongyu, Zhigang Wu, Jifeng Hu, Yuannan Gan, and Sheng Qiang. 2024. "Simulation Test of an Intelligent Vibration System for Concrete under Reinforcing Steel Mesh" Buildings 14, no. 8: 2277. https://doi.org/10.3390/buildings14082277