
Model Design and Application for Excavation Face Stability in Upward Shield Tunneling
 ,
,
Abstract
:1. Introduction
2. Design of the Model Test Apparatus for Face Stability in the USM
2.1. Design Approach to the Model Test Apparatus
2.2. Configuration of the Model Test Apparatus
3. Application of the Model Test for Excavation Face Stability in the USM
3.1. Materials and Methods
3.1.1. Soil Parameters
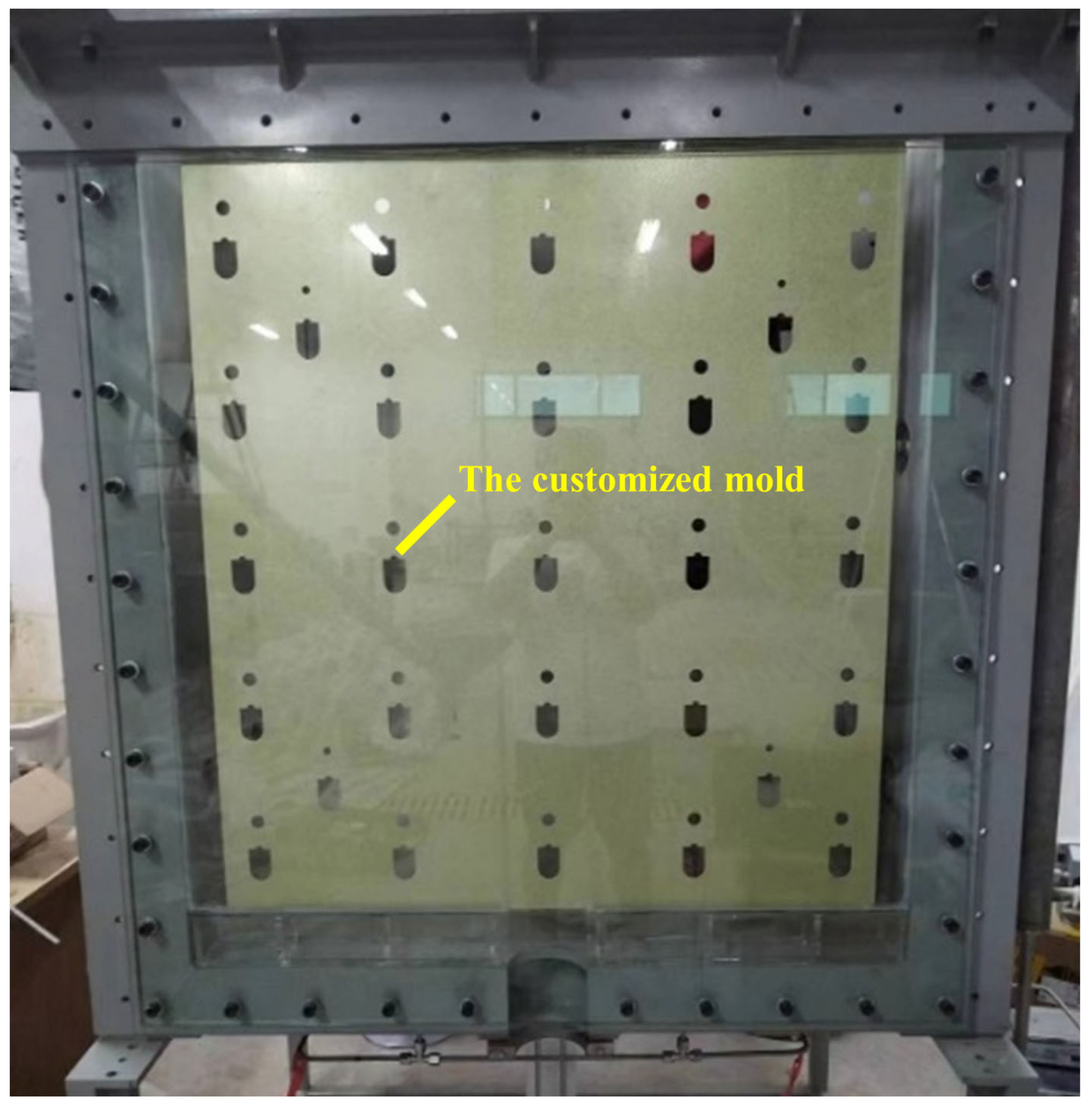
3.1.2. Preparing for PIV
3.1.3. Support Force Noise Removal
3.1.4. Sand Rain Method Calibration
- Prepare nine calibration boxes and weigh them.
- Place the calibration boxes evenly in different positions within the model box.
- Maintain the same horizontal movement speed and conduct sand-making using the sand rain method at a specific drop height.
- After completing the sand-making process, carefully remove the calibration boxes and weigh them to reduce disturbance.
- Calculate the density and take the average. Then, based on the previously measured maximum dry density and minimum dry density, the relative compaction is calculated.
3.1.5. Tests Procedure
- The data acquisition system is connected to the computer to ensure that the initial readings of the axial force sensor and earth pressure sensors in the excavation face are zeroed.
- Use the sand conveyor to transport dry sand to the funnel, keeping the rotary switch in the closed position during this process.
- The height of the round sanding nozzle is adjusted to 0.8 m above the soil surface. Then, the rotary switch is opened to allow for the sand in the funnel to fall evenly into the model box.
- Repeat steps (2) and (3) until the soil height in the model box is suitable for placing the earth pressure sensors within the soil, then zero the corresponding layer’s earth pressure sensors and embed them in the predetermined positions.
- Repeat steps (2) to (4) until all earth pressure sensors and overlying soil layers are in place. Then the displacement sensors are placed in position on the soil surface.
- The image acquisition device is placed in position and adjusted to ensure its function.
- The propulsion control system is applied to raise or back the excavation face by 60 mm at a velocity of 1 mm/min.
- Data from the sensors are saved and recorded by the data acquisition instrument, and the photos taken by the camera are transferred to the computer.
- The soil from the model box is removed, and the displacement sensor frame and the earth pressure sensors embedded in the soil are retrieved.
- All collected data are processed and analyzed.
3.2. Results and Discussion
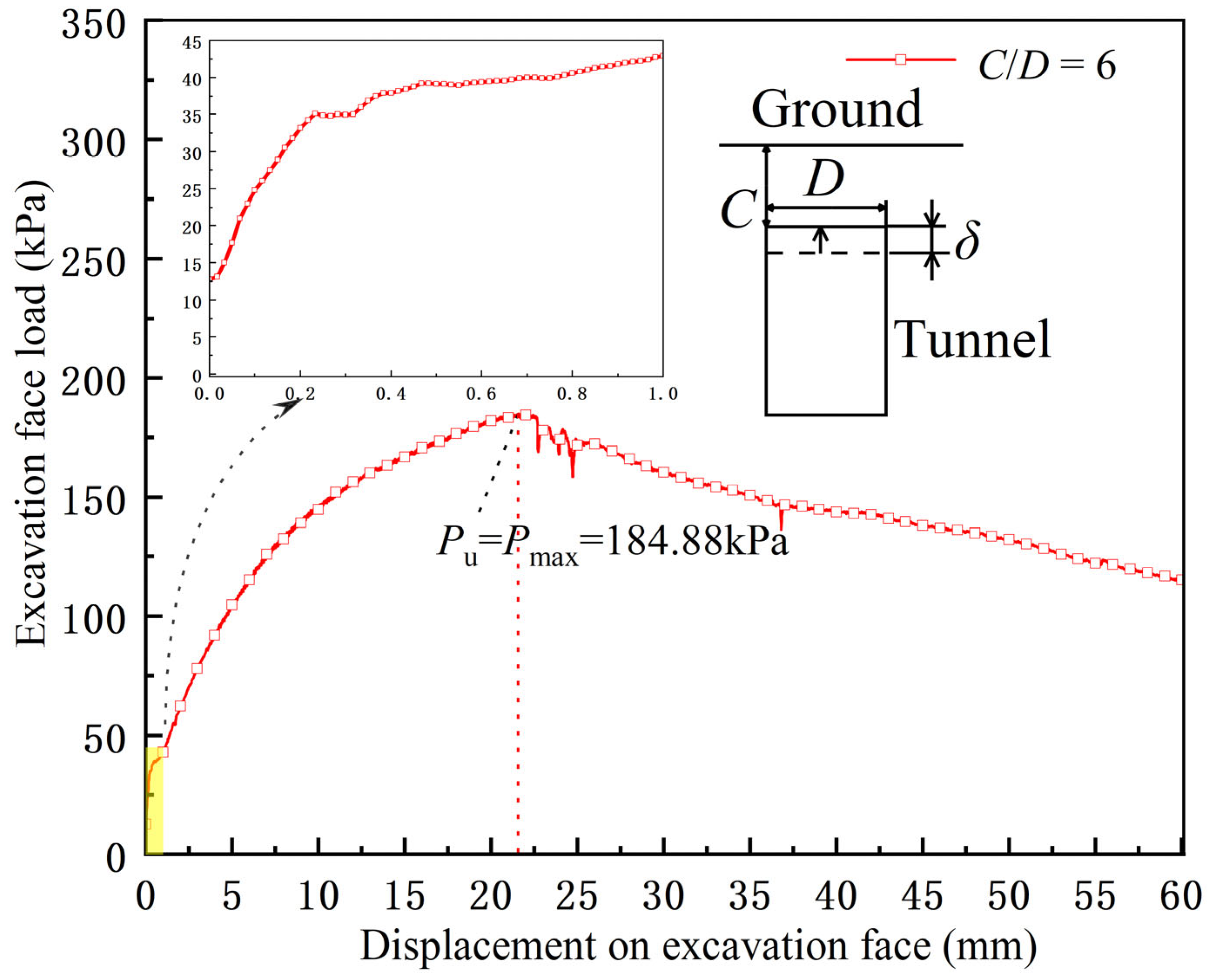
3.2.1. Load–Displacement Variation in Excavation Face
- Rapid Growth Stage: The excavation load increases rapidly with displacement from 0 to 5 mm, and the excavation face load–displacement curve is nearly linear. During this stage, most of the soil undergoes elastic deformation, while some local soil enters the plastic deformation state, gradually mobilizing soil shear strength and the soil arching effect.
- Slow Growth Stage: When the excavation displacement is within the range of 5 mm to 21.55 mm, the excavation face load–displacement curve becomes nonlinear, with the growth in the excavation load slowing down continuously until it reaches a peak value of 184.88 kPa. During this stage, the extent of the soil in the plastic deformation state above the excavation face further expands, and the soil shear strength and soil arching effect continue to play a dominant role in the change of excavation face load.
- Descending Stage: From 21.55 mm to 60 mm, the excavation load continues to decrease, and the excavation face load–displacement curve is nearly linear. The soil shear strength and soil arching effect are almost fully mobilized at the peak excavation face load, with the residual soil arching effect taking place. In this stage, the reduction in the thickness of the overburden above the excavation face plays a dominant role in the change in excavation face load.
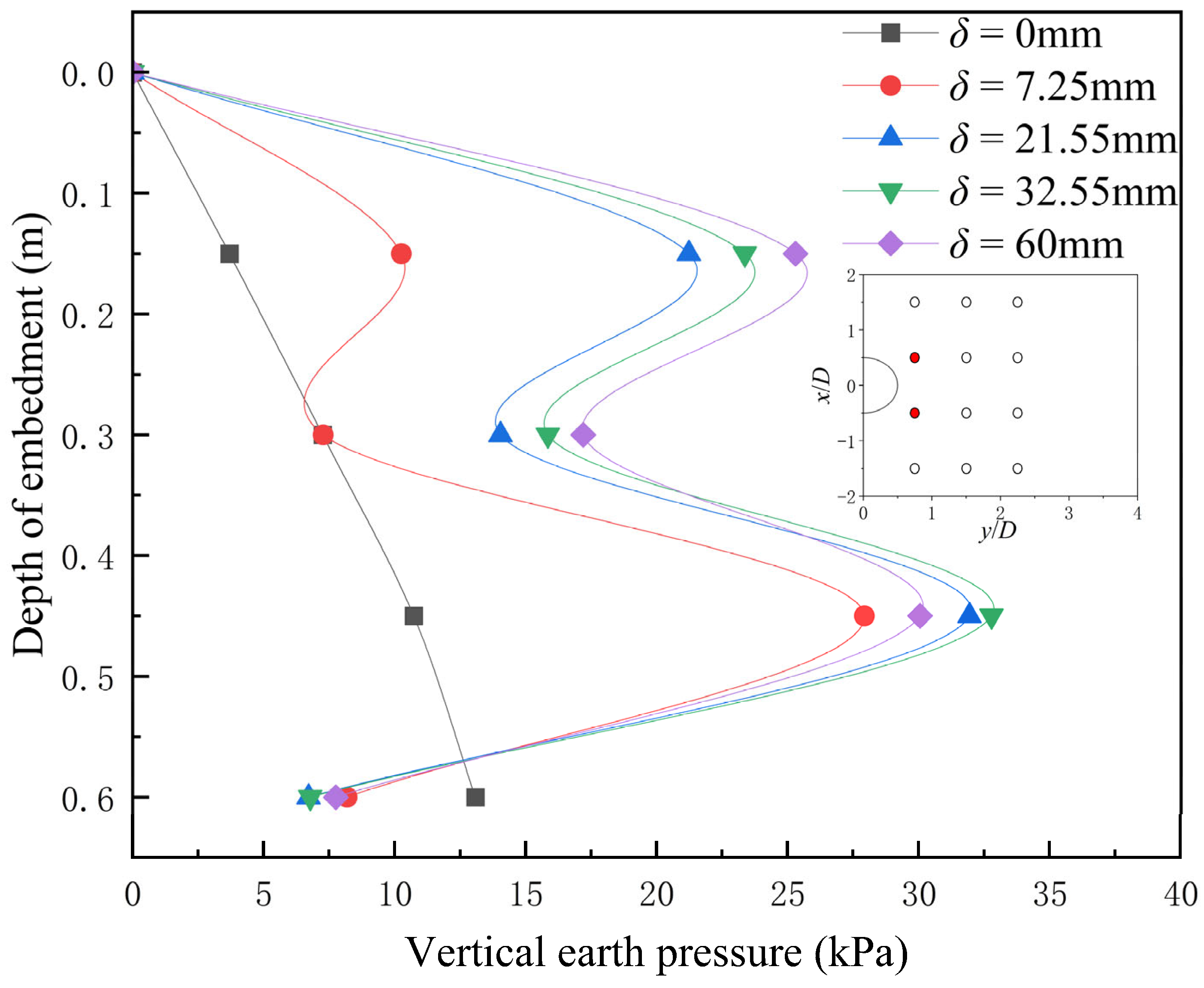
3.2.2. Analysis of the Vertical Earth Pressure Variation
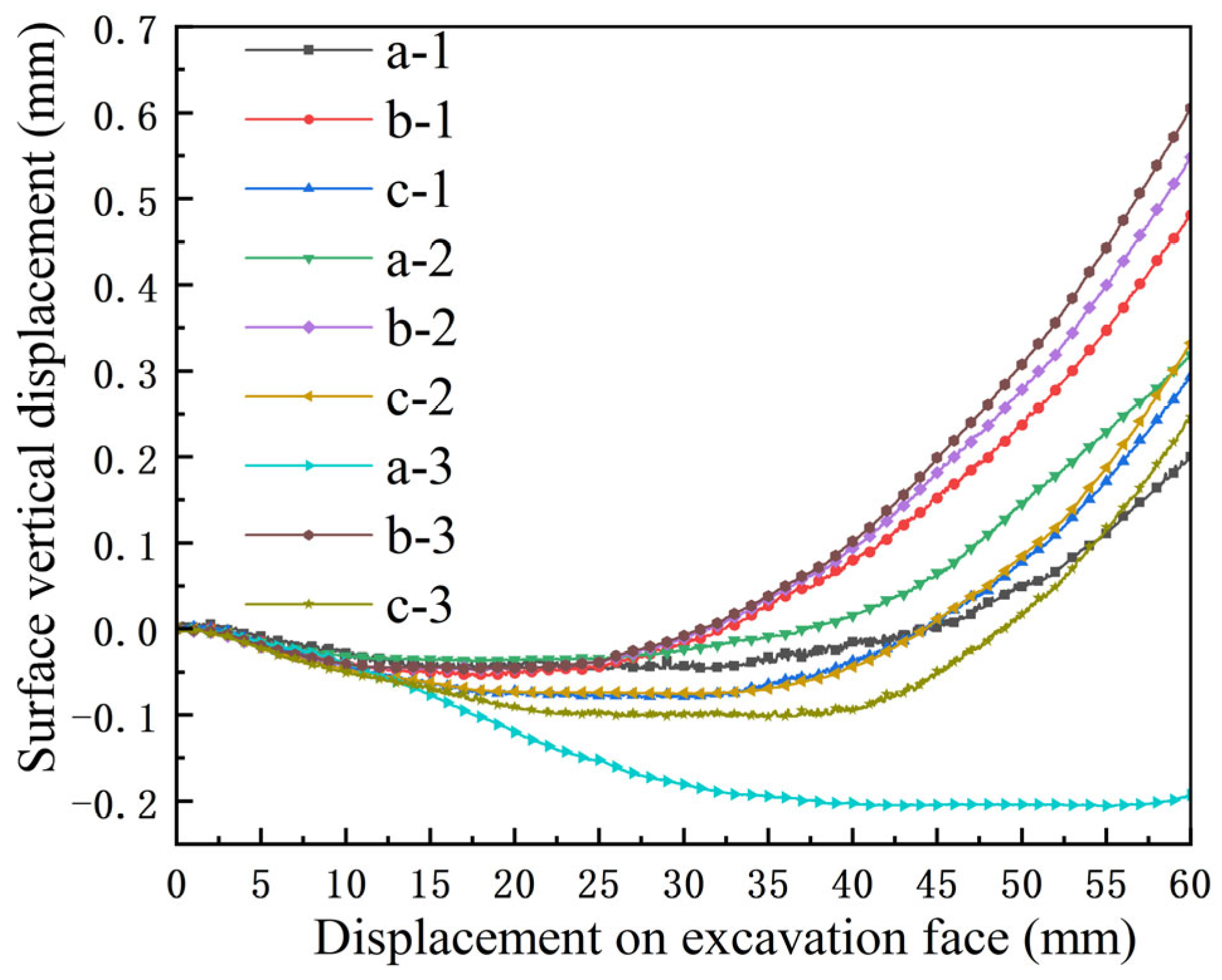
3.2.3. Analysis of the Ground Displacement Variation
3.2.4. Analysis of the Variation in Soil Internal Displacement on the Observation Surface
4. Conclusions
- The variation in tunnel face load generally exhibits three stages, rapid growth, slow growth, and decline, with a maximum support force recorded at 184.88 kPa.
- The patterns of vertical soil pressure changes in failure zones at different depths vary significantly. As the excavation face displacement increases, the vertical soil pressure in the lower part gradually transfers to the upper part.
- Throughout the ascent of the excavation face, surface displacement demonstrates an initial minor settlement followed by accelerated uplift.
- The cylindrical part of the soil above the excavation face within the diameter of the excavation face moves in the Y-axis direction, whereas the soil outside the diameter of the excavation face moves obliquely outward. The angle between the soil movement direction and the vertical increases with distance from the excavation face.
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Konoha, Y.; Yamamoto, Y. Turning simple ideas into reality: Development and application of upward shield tunneling method for the sewer construction project along bandai-hannan line. Civ. Eng. 2003, 53–57. [Google Scholar]
- Ito, K.; Sakae, T.; Hara, S.; Ito, H.; Hashimoto, H. Development of upward shield method. Tunn. Undergr. Space Technol. 2004, 19, 488–489. [Google Scholar]
- Kondo, F.; Sakamoto, H.; Takaishi, T.; Mukai, T. Construction of three vertical shafts using upward shield machine–the bandai–hannan sewer tunnel construction works. Tunn. Undergr. Space Technol. 2004, 19, 491. [Google Scholar] [CrossRef]
- Himuro, A. Upward shield tunneling from deep underground stormwater storage pipes in the central areas. In Proceedings of the WEFTEC 2007, San Diego, CA, USA, 13–17 October 2007; Water Environment Federation: Alexandria, VA, USA, 2007; pp. 9312–9320. [Google Scholar]
- Hiromi, I.; Toshio, K. Excavating shafts from the bottom-construction of the branching shafts of the midosuji common duct by the upward shield tunneling method. In Challenges and Changes Tunnelling Activities in Japan 2014; Japan Tunnelling Association: Tokyo, Japan, 2014; p. 27. [Google Scholar]
- Wang, L.; Wang, Z.; Li, L.; Wang, J. Construction behavior simulation of a hydraulic tunnel during standpipe lifting. Tunn. Undergr. Space Technol. 2011, 26, 674–685. [Google Scholar] [CrossRef]
- Wang, L.; Sun, L.; Wang, Z.; Zhang, J. Field monitoring of a subsea shield tunnel during standpipe lifting. Tunn. Undergr. Space Technol. 2015, 45, 52–62. [Google Scholar] [CrossRef]
- Wang, X.; Behbahani, S.S.; Iseley, T.; Azimi, M.; Wei, X.; Wei, G.; Shi, Y. Vertical tunneling in china—A case study of a hydraulic tunnel in beihai. Tunn. Undergr. Space Technol. 2021, 107, 103650. [Google Scholar] [CrossRef]
- Zhou, W. Shield Tunnel Construction Technology and Application; China Architecture & Building Press: Beijing, China, 2004. [Google Scholar]
- Lu, L.; Wei, X.; Wang, X.; Yan, Z.; Cheng, Z.; Hu, H. Mechanical behavior of the special segment structure during upward shield tunnel construction. Math. Probl. Eng. 2022, 2022, 8587689. [Google Scholar] [CrossRef]
- Mair, R.J.; Taylor, R.N. Bored tunnelling in the urban environments. In Proceedings of the Fourteenth International Conference on Soil Mechanics and Foundation Engineering, Hamburg, Germany, 6–12 September 1997; National Academy of Sciences: Washington, DC, USA, 1999; Volume 4. [Google Scholar]
- Kirsch, A. Experimental investigation of the face stability of shallow tunnels in sand. Acta Geotech. 2010, 5, 43–62. [Google Scholar] [CrossRef]
- Chen, R.; Li, J.; Kong, L.; Tang, L. Experimental study on face instability of shield tunnel in sand. Tunn. Undergr. Space Technol. 2013, 33, 12–21. [Google Scholar] [CrossRef]
- Liu, W.; Zhao, Y.; Shi, P.; Li, J.; Gan, P. Face stability analysis of shield-driven tunnels shallowly buried in dry sand using 1-g large-scale model tests. Acta Geotech. 2018, 13, 693–705. [Google Scholar] [CrossRef]
- Di, Q.; Li, P.; Zhang, M.; Cui, X. Influence of relative density on deformation and failure characteristics induced by tunnel face instability in sandy cobble strata. Eng. Fail. Anal. 2022, 141, 106641. [Google Scholar] [CrossRef]
- Ma, S.; Duan, Z.; Huang, Z.; Liu, Y.; Shao, Y. Study on the stability of shield tunnel face in clay and clay-gravel stratum through large-scale physical model tests with transparent soil. Tunn. Undergr. Space Technol. 2022, 119, 104199. [Google Scholar] [CrossRef]
- Lee, I.-M.; Nam, S.-W. The study of seepage forces acting on the tunnel lining and tunnel face in shallow tunnels. Tunn. Undergr. Space Technol. 2001, 16, 31–40. [Google Scholar] [CrossRef]
- Wang, J.; He, C.; Xu, G. Face stability analysis of EPB shield tunnels in dry granular soils considering dynamic excavation process. J. Geotech. Geoenviron. Eng. 2019, 145, 04019092. [Google Scholar] [CrossRef]
- Xue, F.; Zhang, M. Excavation face stability of shield tunneling closely under existing tunnels: Particle flow simulation. Iran. J. Sci. Technol. Trans. Civ. Eng. 2020, 44, 497–506. [Google Scholar] [CrossRef]
- Yin, X.; Chen, R.; Meng, F. Influence of seepage and tunnel face opening on face support pressure of EPB shield. Comput. Geotech. 2021, 135, 104198. [Google Scholar] [CrossRef]
- Ma, S.; Li, J.; Li, Z. Critical support pressure of shield tunnel face in soft-hard mixed strata. Transp. Geotech. 2022, 37, 100853. [Google Scholar] [CrossRef]
- Lee, I.-M.; Nam, S.-W.; Ahn, J.-H. Effect of seepage forces on tunnel face stability. Can. Geotech. J. 2003, 40, 342–350. [Google Scholar] [CrossRef]
- Lu, X.; Wang, H.; Huang, M. Upper bound solution for the face stability of shield tunnel below the water table. Math. Probl. Eng. 2014, 2014, 727964. [Google Scholar] [CrossRef]
- Zhang, C.; Han, K.; Zhang, D. Face stability analysis of shallow circular tunnels in cohesive–frictional soils. Tunn. Undergr. Space Technol. 2015, 50, 345–357. [Google Scholar] [CrossRef]
- Chen, R.; Yin, X.; Tang, L.; Chen, Y. Centrifugal model tests on face failure of earth pressure balance shield induced by steady state seepage in saturated sandy silt ground. Tunn. Undergr. Space Technol. 2018, 81, 315–325. [Google Scholar] [CrossRef]
- Li, P.; Chen, K.; Wang, F.; Li, Z. An upper-bound analytical model of blow-out for a shallow tunnel in sand considering the partial failure within the face. Tunn. Undergr. Space Technol. 2019, 91, 102989. [Google Scholar] [CrossRef]
- Liu, X.; Wang, F.; Fang, H.; Yuan, D. Dual-failure-mechanism model for face stability analysis of shield tunneling in sands. Tunn. Undergr. Space Technol. 2019, 85, 196–208. [Google Scholar] [CrossRef]
- Mi, B.; Xiang, Y. Analysis of the limit support pressure of a shallow shield tunnel in sandy soil considering the influence of seepage. Symmetry 2020, 12, 1023. [Google Scholar] [CrossRef]
- Wong, K.S.; Ng, C.W.W.; Chen, Y.M.; Bian, X.C. Centrifuge and numerical investigation of passive failure of tunnel face in sand. Tunn. Undergr. Space Technol. 2012, 28, 297–303. [Google Scholar] [CrossRef]
- Chen, R.; Li, J.; Chen, Y.; Kong, L. Large-scale tests on face stability of shield tunnelling in dry cohesionless soil. Chin. J. Geotech. Eng. 2011, 33, 117–122. (In Chinese) [Google Scholar]
- LÜ, X.; Zeng, S.; Wang, Y.; Ma, S.; Huang, M. Physical model tests on stability of shield tunnel face in saturated gravel stratum. Chin. J. Geotech. Eng. 2019, 41, 129–132. (In Chinese) [Google Scholar]
- Ma, S.; Wei, R.; Shao, Y.; Huang, Z.; Duan, Z. 3D visual model tests on stability of tunnel excavation surface based on transparent soil. Chin. J. Geotech. Eng. 2021, 43, 1798–1806. [Google Scholar] [CrossRef]
- Mi, B. Study on Limit Failure Mode and Support Pressure of Tunnel Face of Underwater Shallow Shield Tunnel; Beijing Jiaotong University: Beijing, China, 2022. (In Chinese) [Google Scholar]
- Niu, H.; Weng, X.; Yu, H.; Hu, J. Centrifugal test study on instability mode of shield tunnel excavation facein silty sand stratum under seepage. China Civ. Eng. J. 2020, 53, 99–104. [Google Scholar] [CrossRef]
- Yan, B. Numerical Simulation and Centrifugal Test Study on Stability of Shield Tunnel Excavation Surface under Seepage Conditions; Chang’an University: Xi’an, China, 2021. [Google Scholar]
- Berthoz, N.; Branque, D.; Subrin, D.; Wong, H.; Humbert, E. Face failure in homogeneous and stratified soft ground: Theoretical and experimental approaches on 1g EPBS reduced scale model. Tunn. Undergr. Space Technol. 2012, 30, 25–37. [Google Scholar] [CrossRef]
- Lü, X.; Zeng, S.; Zhao, Y.; Huang, M.; Ma, S.; Zhang, Z. Physical model tests and discrete element simulation of shield tunnel face stability in anisotropic granular media. Acta Geotech. 2020, 15, 3017–3026. [Google Scholar] [CrossRef]
- Idinger, G.; Aklik, P.; Wu, W.; Borja, R.I. Centrifuge model test on the face stability of shallow tunnel. Acta Geotech. 2011, 6, 105–117. [Google Scholar] [CrossRef]
- Gaur, H.; Khidhir, B.; Manchiryal, R.K. Solution of structural mechanic’s problems by machine learning. Int. J. Hydromechatron. 2022, 5, 22–43. [Google Scholar] [CrossRef]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Methods | VTM | USM |
|---|---|---|
| Similarities | The jacking direction is from the lining of the underground constructed horizontal tunnel to the ground or subsea surface. Some structures, such as special segments [3] or ceiling segments, need to be installed during the construction of the horizontal tunnel. Work on the soil surface is simple. Most of the on-road work can be avoided in the USM. Likewise, large-scale machines and equipment used for on-water operations are not needed in the VTM. The work time on the road and total construction time is short in both methods. The construction period of the USM can be shortened to one-third and the surface operations time by one-sixth compared with traditional construction methods such as the cut-and-cover method [1,3,5]. One outlet standpipe about 8~12 m in depth can be constructed in around two days by applying the VTM [9]. | |
| Difference (1): Advancement way. | Jacking upward is processed through soil displacement. | Advance upward through soil removal. |
| Difference (2): The special structures treatment. | The ceiling segments in the VTM are lifted with the standpipes during the construction process. | A special segment is easily cuttable by the upward shield machine. |
| Difference (3): Application situations. | The VTM is mainly applied in hydraulic tunnel projects to build water inlet or outlet drainage, its application range is narrower compared to the USM, but it can be promoted to use in congested city areas in the future. | The USM is always used in congested city areas, and it can be applied to multiple projects [2]. |
| Difference (4): Different sizes and depths of shafts. | The shafts are mainly square in shape. Moreover, the size is 1.9 m × 1.9 m (square) and ranges from 0.9 m to 1.4 m (round), smaller than that of the USM. The depth is mainly between 8 and 12 m, much shallower than the depth of shafts in the USM [9]. | Shafts are all round in shape. The irregularity of the cross-section is under study [2]. The diameters range from 2 to 4 m, and the depth can reach 50 m [2]. |
| Difference (5): Different geological conditions. | The VTM is often limited to being applied in saturated soft soil layers. | The USM can be applied to various types of geotechnical materials. |
| Difference (6): Grouting or not. | Soil weakening measures instead of grouting are used in the VTM. | Grouting is applied to reduce the friction force between the soil and the tunnel surface. |
| Difference (7): Different ways of reusing machines. | The jacking platform and jacks can be reused by easily moving them from the position of one shaft to another shaft. | The tunnel boring machine should be relocated to the working pit before reusing it. |
| The Horizontal Tunnel | The Upward Tunnel | The Upward Shield Excavation Face | |||
|---|---|---|---|---|---|
| Outer Diameter | Inner Diameter | Outer Diameter | Inner Diameter | Diameter | |
| Prototype | 5.07 | 4.77 | 3.3 | 3 | 3 |
| Model | 0.169 | 0.159 | 0.11 | 0.1 | 0.1 |
| Type | Dry Sand |
|---|---|
| Density ρ | 1.51 g/cm3 |
| Moisture content ω | 0.35% |
| Grain density Gs | 2.6623 |
| Min dry density ρmin | 1.429 |
| Max dry density ρmax | 1.772 g/cm3 |
| Average particle size d50 | 481 μm |
| Coefficient of uniformity Cu (d60/d10) | 1.943098 |
| Coefficient of curvature Cc () | 1.059796 |
| Frictional angle φ | 29° |
| Cohesion c | 0 kPa |
| Ref. | Soil | Backward Distance of the Excavation Face (mm) | Backward Speed of the Excavation Face (Non-Uniform Unit) | Backward Speed of the Excavation Face (The Unified Unit is mm/min) | Tunnel Diameter (mm) | Backward Distance of the Excavation Face/Tunnel Diameter |
|---|---|---|---|---|---|---|
| Chen et al. [30] | Dry sand | 60 | Each stage retreated by 0.1 mm, with intervals between stages exceeding 40 min but not exceeding 2 h. | 0.0008~0.0025 | 1000 | 0.06 |
| LÜ et al. [31] | Gravel | 15 | 0.0025 mm/min | 0.0025 | 150 | 0.1 |
| Ma et al. [32] | Transparent soil | 20 | 0.05 mm/min | 0.05 | 120 | 0.17 |
| Mi [33] | Clay sand | 60 | 0.1 mm/s | 6 | 300 | 0.2 |
| Niu et al. [34] | Sand + clay (various ratios) | 15 | s < 5 mm, v = 0.1 mm/min; 5 mm < s < 10 mm, v = 0.2 mm/min; 10 mm < s < 15 mm, v = 0.4 mm/min; | 0.1–0.4 | 100 | 0.15 |
| Yan [35] | Sandy silty | 10 | s < 2 mm, v = 0.l mm/min; 2 mm < s< 6 mm, v = 0.2 mm/min; 6 mm < s< 10 mm, v = 0.4 mm/min | 0.1–0.4 | 100 | 0.1 |
| Kirsch [12] | Dry sand | 25 | - | - | 100 | 0.25 |
| Liu et al. [14] | Dry sand | 30 | 0.02 mm/s~0.08 mm/s | 1.2–4.8 | 600 | 0.05 |
| Chen et al. [25] | Sandy silt | 10 | s < 6 mm, v = 0.2 mm/min; 6 mm < s < 10 mm, v = 0.4 mm/min; | 0.2–0.4 | 100 | 0.1 |
| Berthoz et al. [36] | Houston S28 sand | 50 | - | - | 550 | 0.09 |
| Lü et al. [37] | Rice grain | 3 | 0.05 mm/min | 0.05 | 150 | 0.02 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, X.; Li, Y.; Wei, G.; Wei, X.; Yan, Z.; Yan, J.; Li, B. Model Design and Application for Excavation Face Stability in Upward Shield Tunneling. Buildings 2024, 14, 2514. https://doi.org/10.3390/buildings14082514
Wang X, Li Y, Wei G, Wei X, Yan Z, Yan J, Li B. Model Design and Application for Excavation Face Stability in Upward Shield Tunneling. Buildings. 2024; 14(8):2514. https://doi.org/10.3390/buildings14082514
Chicago/Turabian StyleWang, Xiao, Yijie Li, Gang Wei, Xinjiang Wei, Zihai Yan, Jiajia Yan, and Baojian Li. 2024. "Model Design and Application for Excavation Face Stability in Upward Shield Tunneling" Buildings 14, no. 8: 2514. https://doi.org/10.3390/buildings14082514