
Intelligent Monitoring System for Deep Foundation Pit Based on Digital Twin

 ,
,  and
and
Abstract
:1. Introduction
2. Digital Twin Framework for Deep Foundation Pit Modeling
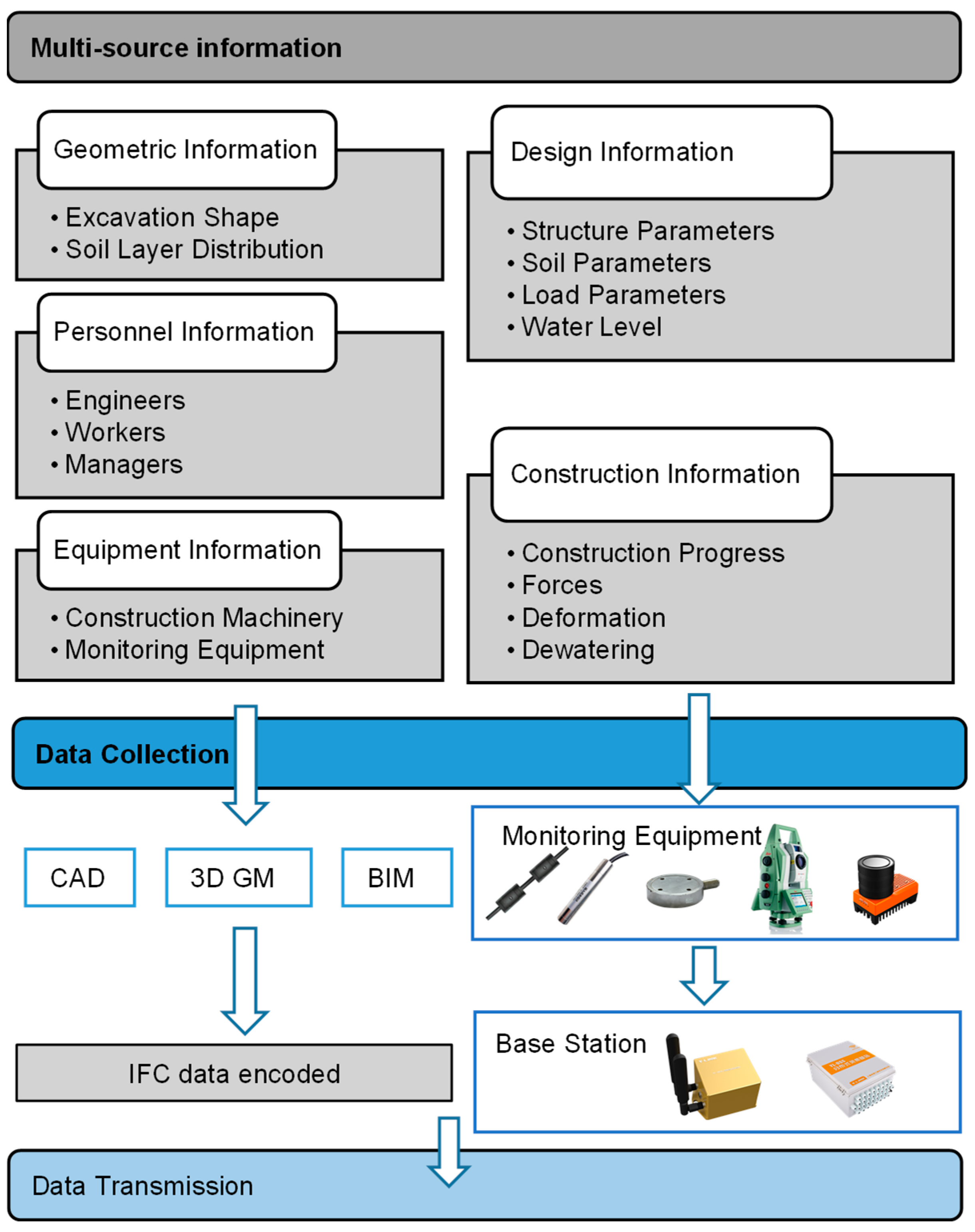
2.1. The Physical Space
2.2. The Virtual Space
2.3. Services
2.4. DT Data and Connection
3. DT Foundation Pit Modeling in the Virtual Space
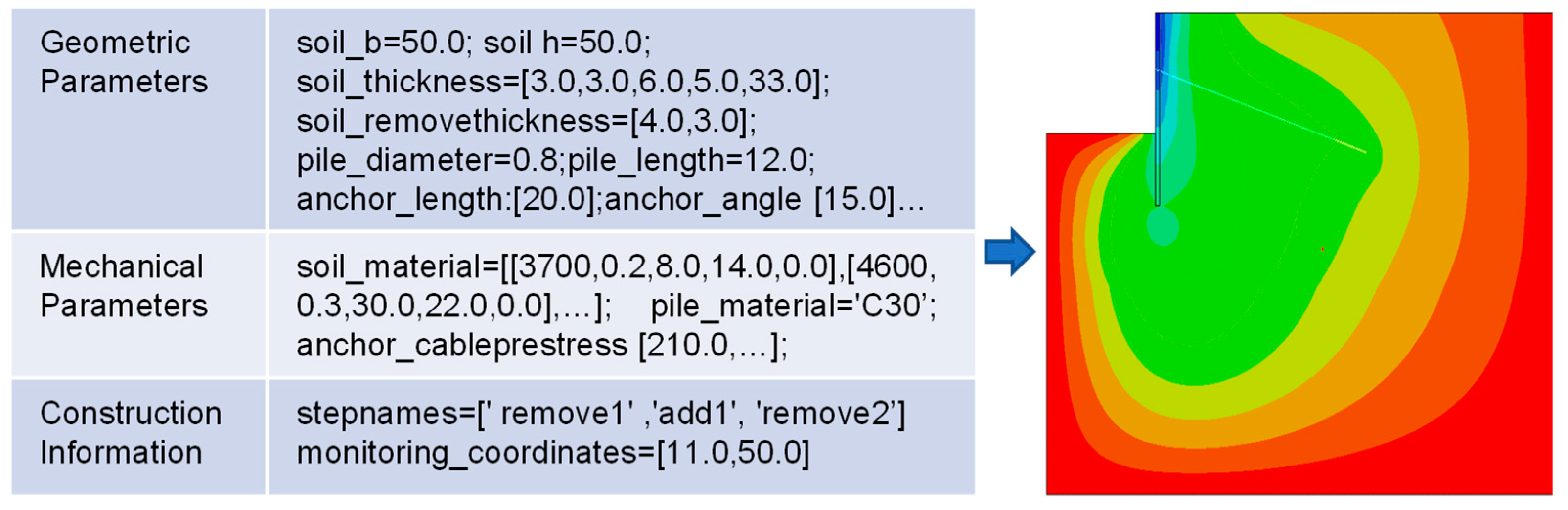
3.1. Parametric Modeling of Foundation Pit
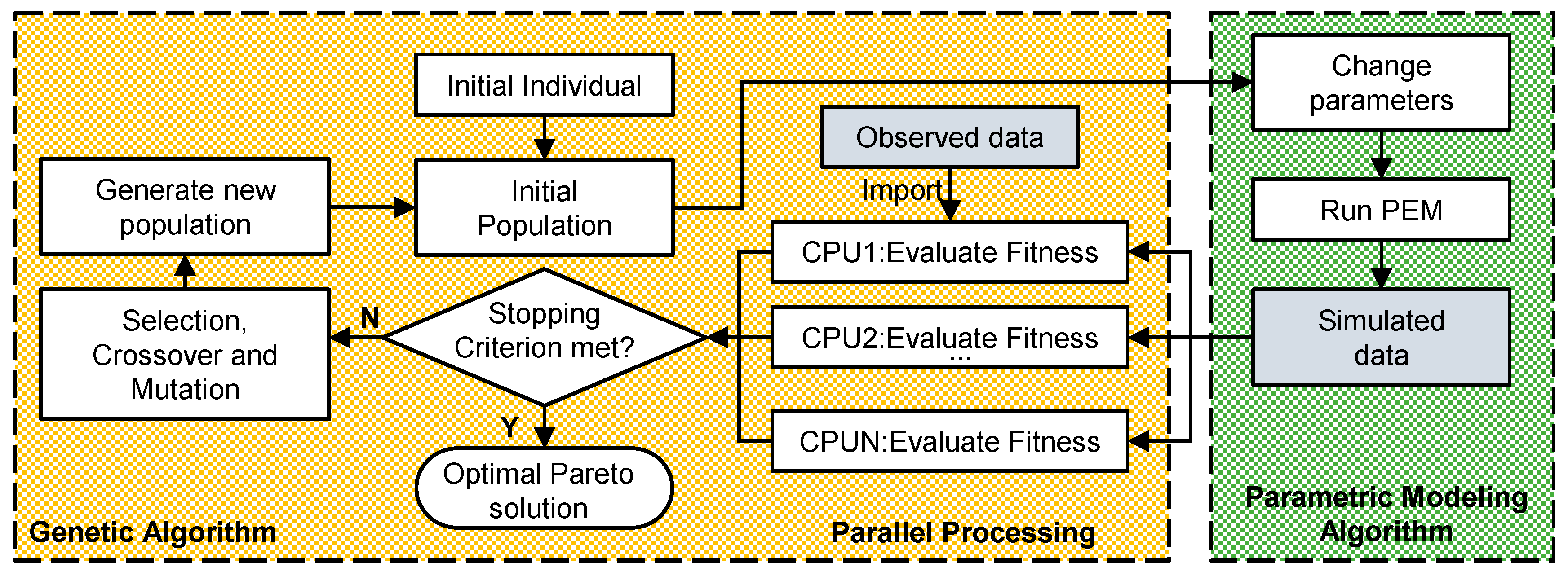
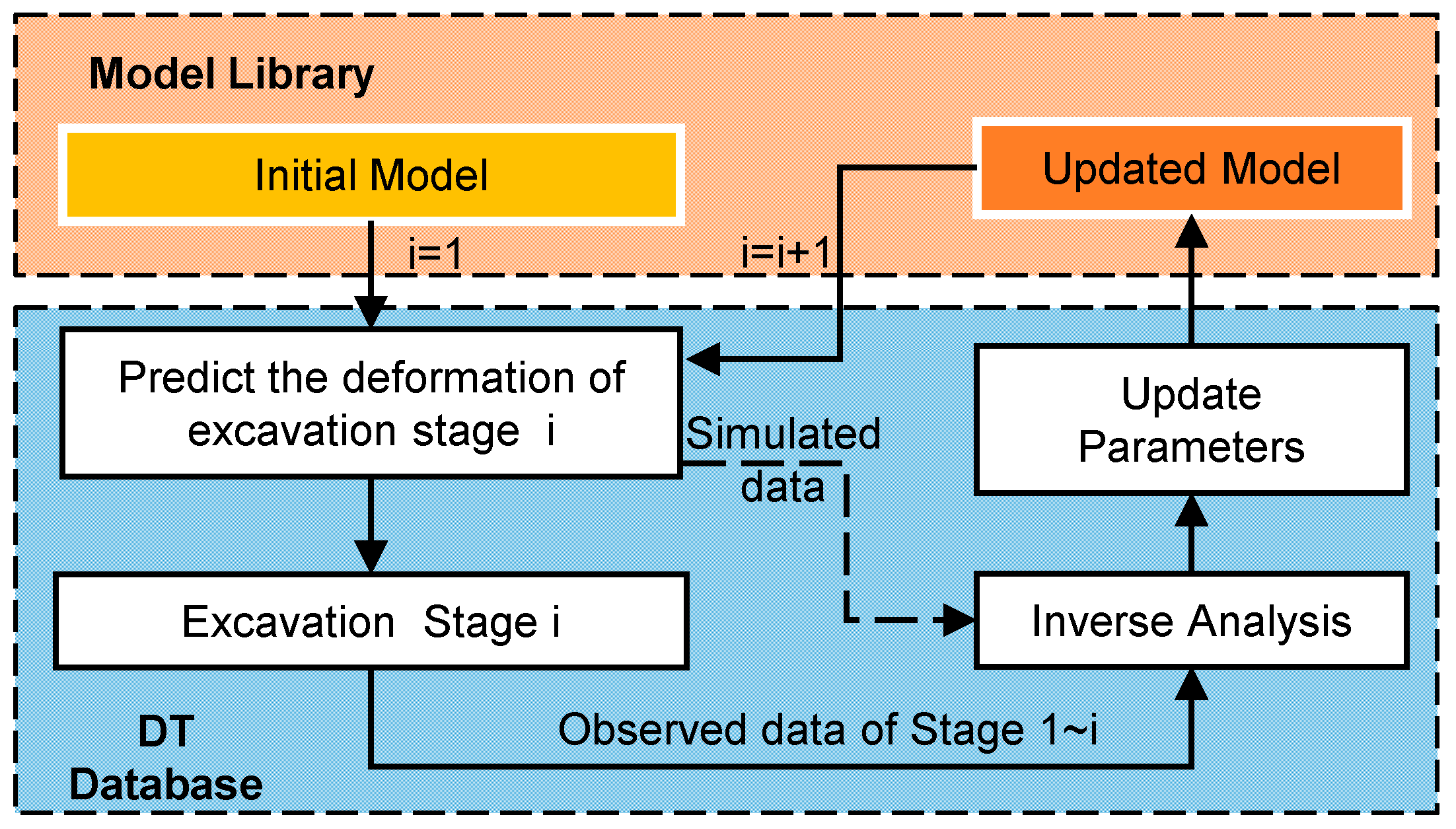
3.2. Inverse Analysis for Model Updating
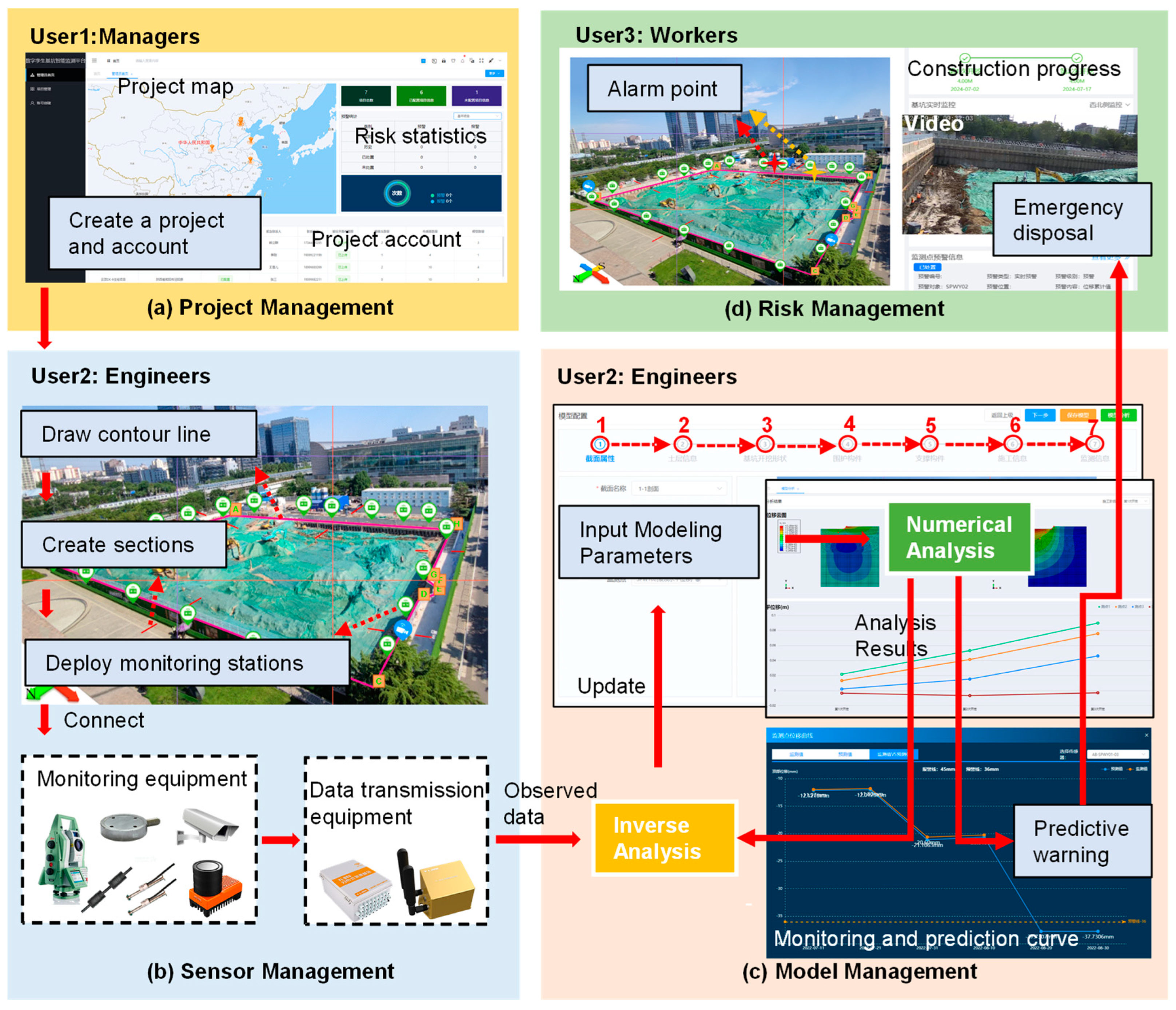
4. Prototype of Developed DT System
4.1. Project Management
4.2. Sensor Management
4.3. Model Management
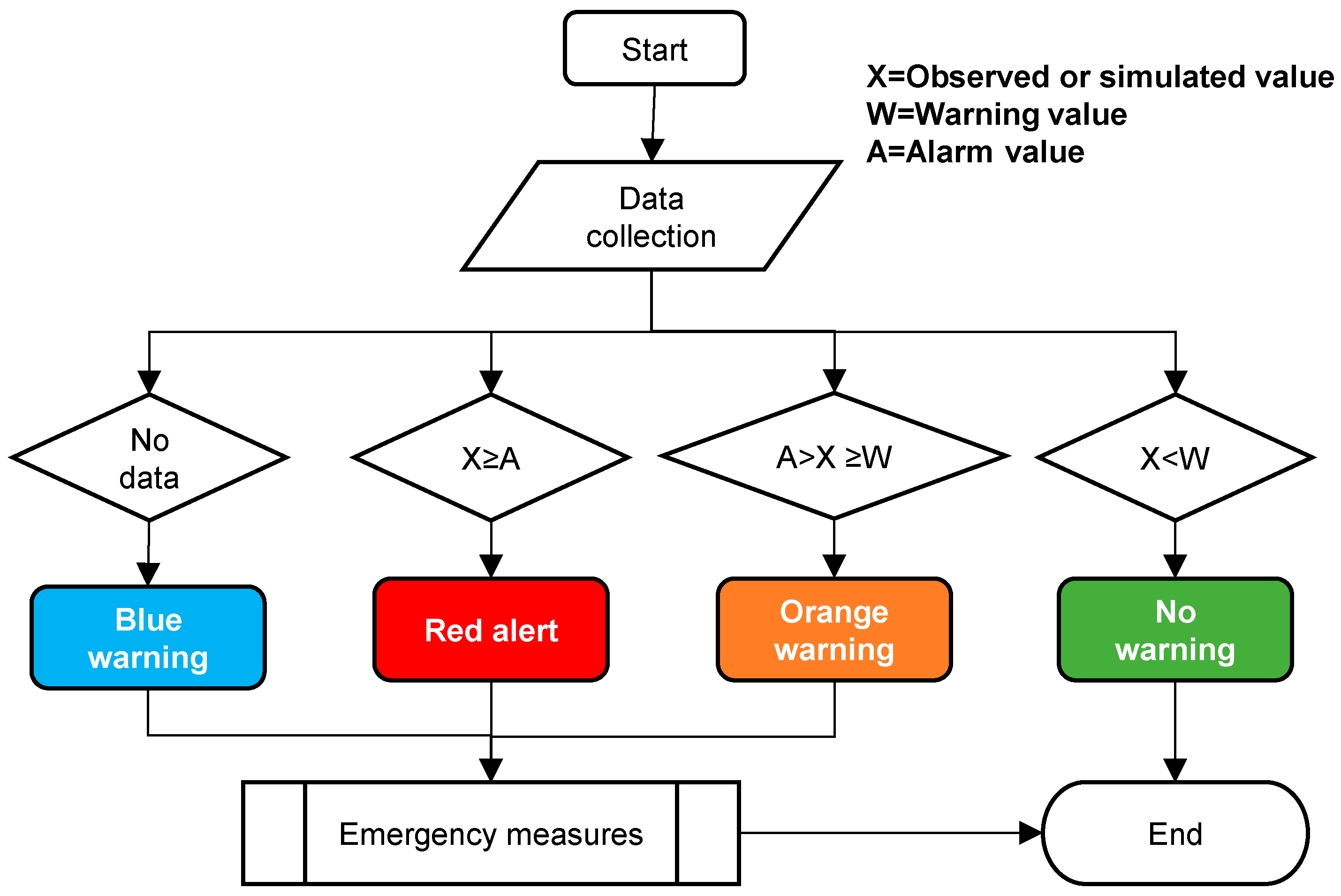
4.4. Risk Management
5. Case Study: A Foundation Pit Excavation Project in Beijing
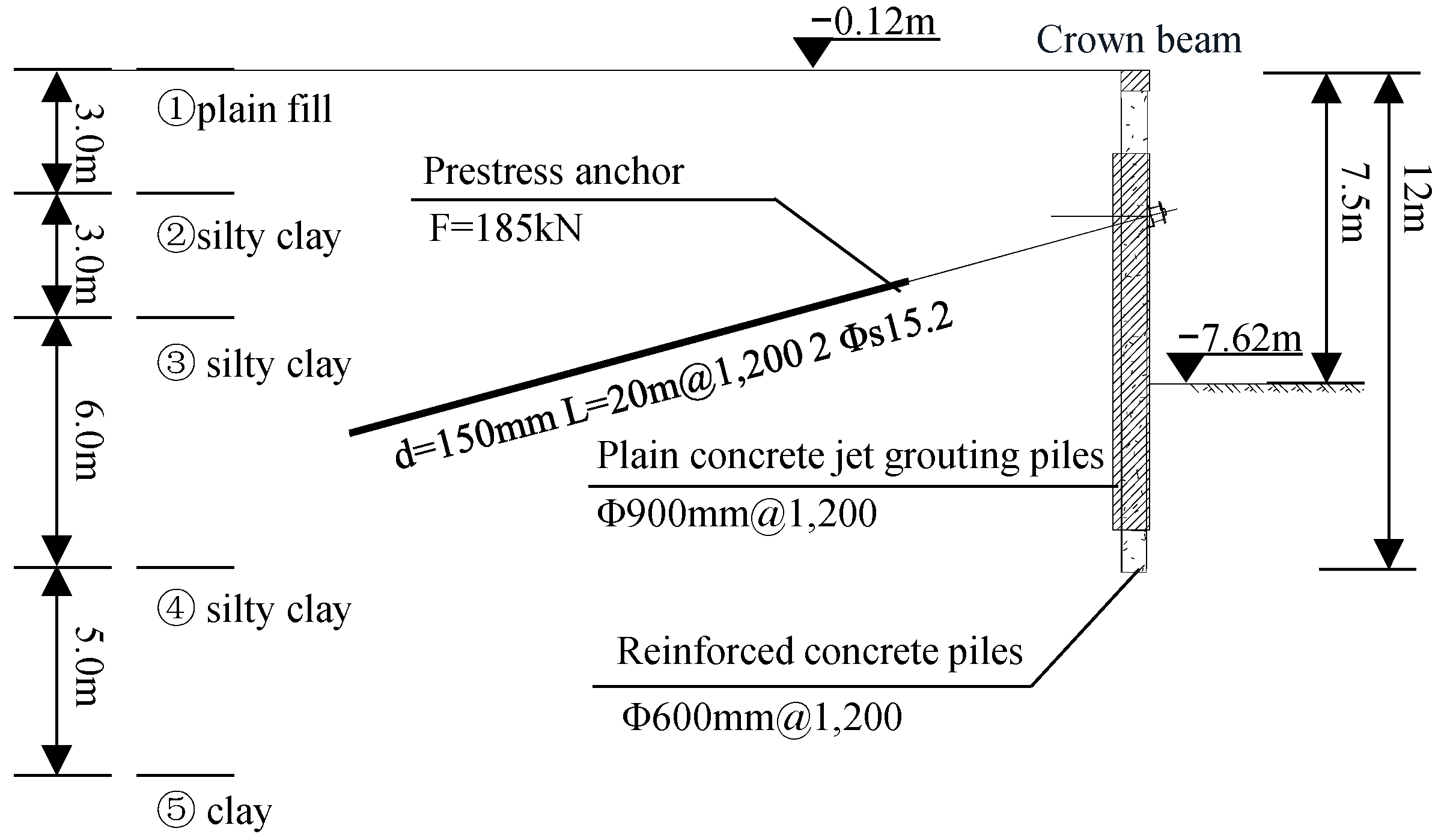
5.1. Project Overview
5.2. Collecting Data from Physical Spaces
5.3. Modeling in the Virtual Space
- (1)
- Modeling and initial analysis
- (2)
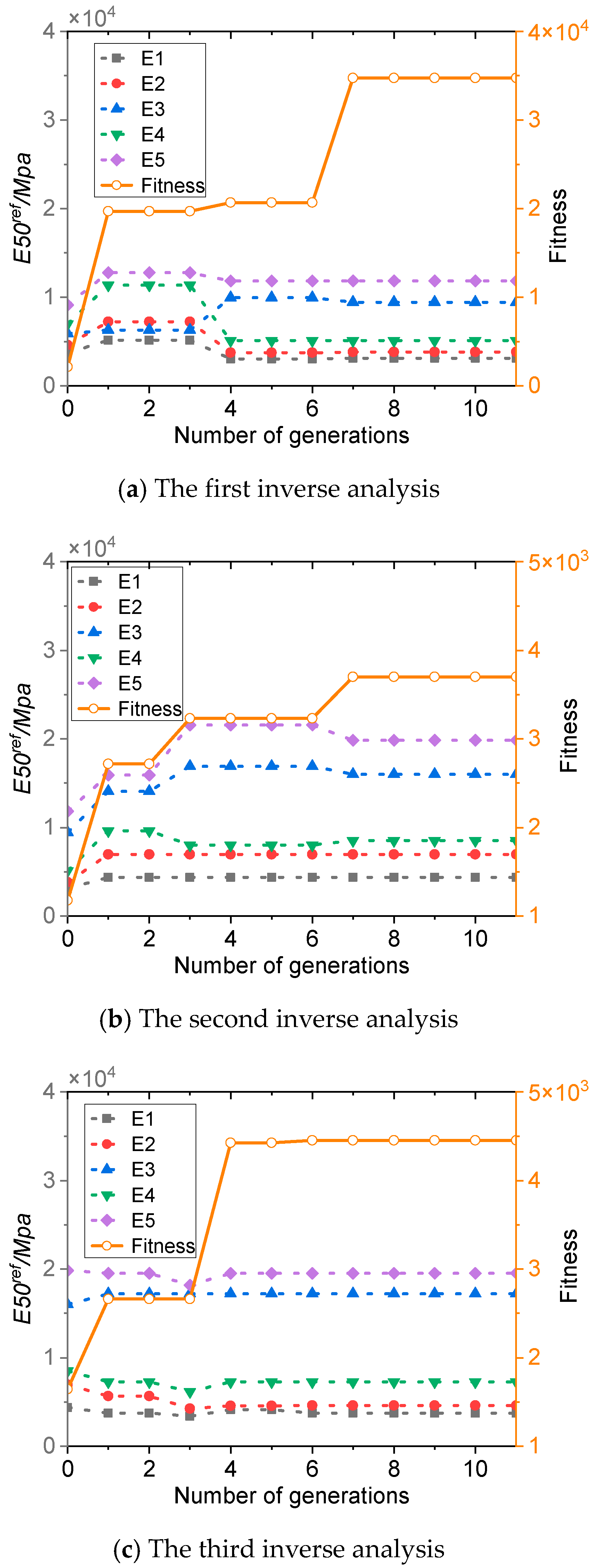
- Inverse analysis and model updating
- (3)
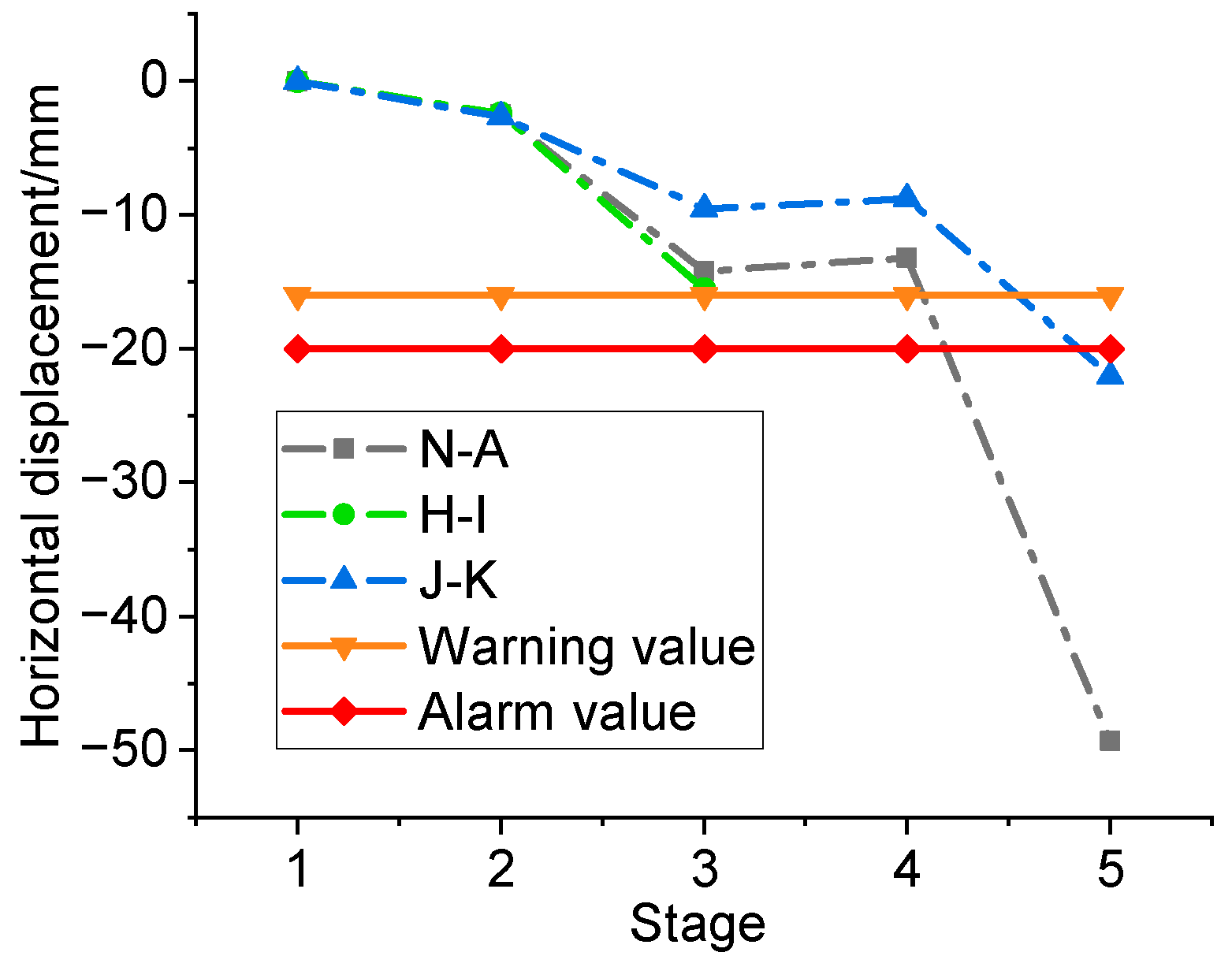
- Prediction with the updated model
- (1)
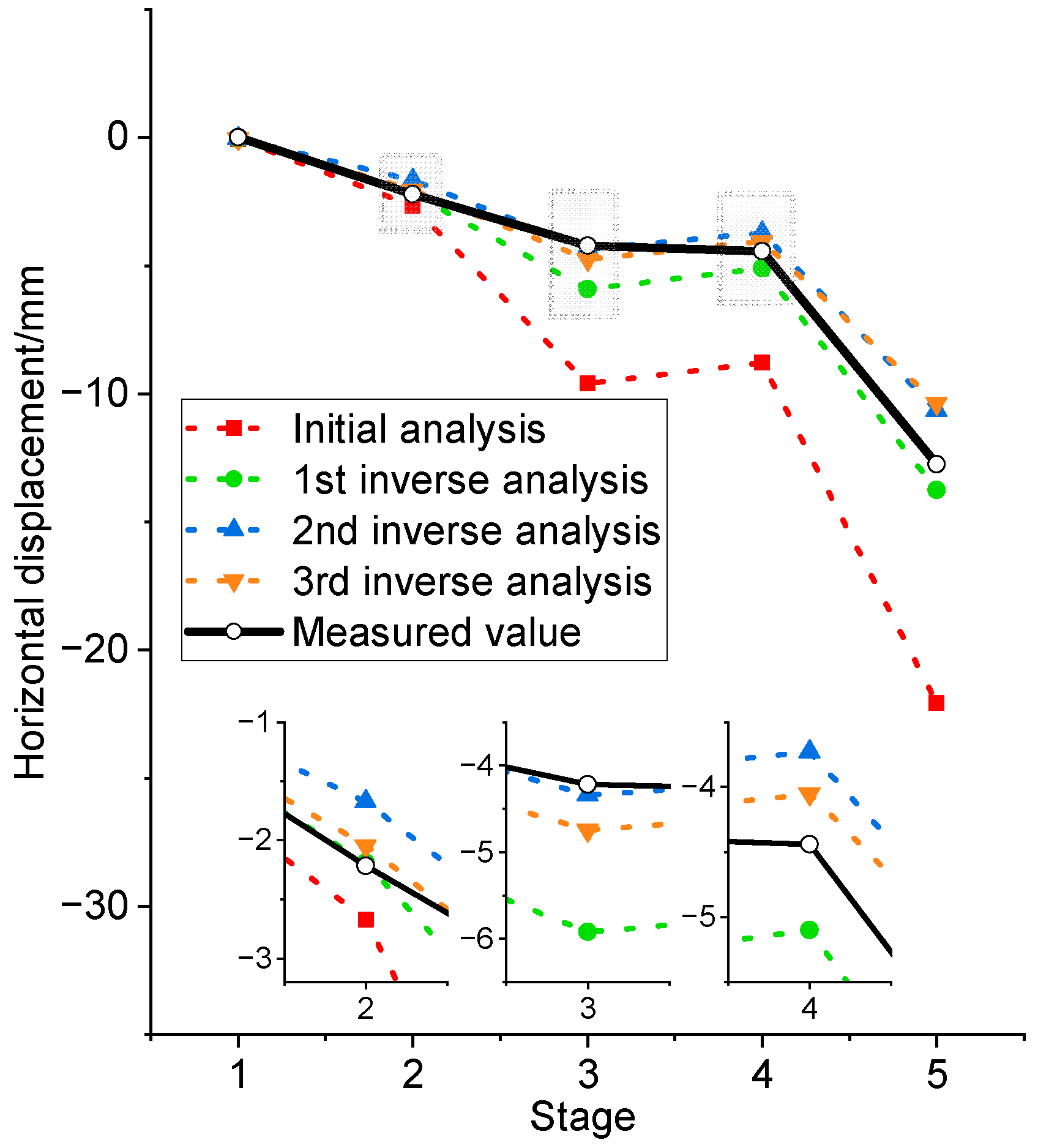
- In stage 2, the first inverse analysis was carried out after 2 m of excavation. The prediction error for stage 2 was approximately 20% for the initial model and 1% for the updated model, which indicates that the updated model is closer to the actual site. The prediction error of the updated model for the deformation in stage 3 is about 40%.
- (2)
- In stage 3, after the second update, the model’s prediction error for stage 3 was less than 1%, and for stage 4, it was approximately 16%.
- (3)
- In stage 4, the model was updated for the third time. The updated model predicted the deformation of the final construction stage with an error of about 19%, which was slightly larger than the first and second updates.
6. Conclusions and Future Work
- (1)
- A DT-based modeling and application framework for foundation pits is proposed. The comprehensive framework, which includes the physical space, finite element model, digital twin data, intelligent early warning web services, and their connections, has the potential to significantly enhance the safety monitoring and management of excavation in the construction industry. Additionally, a safety risk management scheme for foundation pit construction based on DTFPM is also proposed, which could promote the application of digital twin technology in construction safety monitoring, thereby improving overall safety standards.
- (2)
- The authors summarize the five basic support types and refines the key modeling parameters for each support type. A method for generating simulation models based on ABAQUS is formed by sorting out the relationships between different parameters. A parametric modeling algorithm based on ABAQUS is developed. This algorithm supports various types of support and uses multiple soil constitutive models, such as M-C and MHS, which are suitable for numerical simulations under complex geological conditions. This method can generate a FEM within one second, reducing the difficulty of modeling foundation pits and allowing numerical simulations to be used in more engineering applications.
- (3)
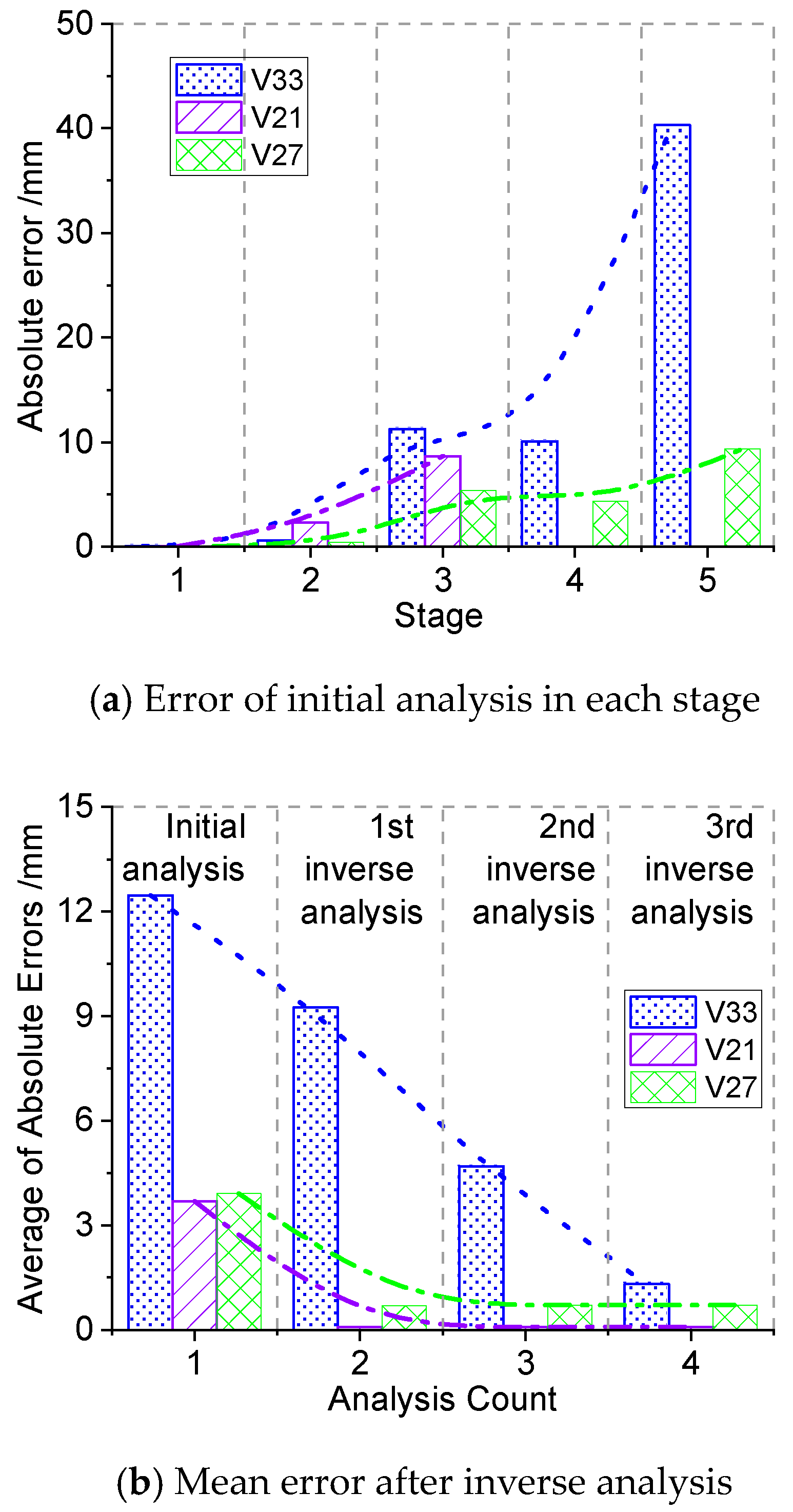
- This study focuses on the deformation of the support structures and the changes in soil elastic modulus during the excavation of foundation pits. A parallel computing-based inverse analysis algorithm using GA is developed. Analysis shows that the algorithm has high computational efficiency and strong convergence, able to converge to the optimal solution within 10 generations. It enables real-time updating of model parameters based on field monitoring deformation data, which enhances DTFPM’s predictive capabilities and ensures accurate predictions. Case analysis shows that the prediction error of the updated model for the current construction stage can be reduced to within 10%. The average error was reduced from 12.46 mm to 1.32 mm after model updating. Additionally, the algorithm supports multi-task parallel computing, exhibiting excellent analysis efficiency and convergence.
- (4)
- An intelligent safety early warning system based on DTFPM is established, and its practicality is validated in engineering practice. Intelligent sensing devices were employed for the collection and transmission of monitoring data. The author developed multiple data interfaces and a relational database, facilitating the establishment and updating of the DTFPM model with multi-source and heterogeneous data. A three-stage early warning mechanism is integrated into the system, offering advanced warning services for the risks of foundation pit excavation. This system ensures construction safety by providing timely and accurate warnings.
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Zheng, G.; Zhu, H.; Liu, X.; Yang, G. Control of safety of deep excavations and underground engineering and its impact on surrounding environment. China Civ. Eng. J. 2016, 49, 1–24. [Google Scholar]
- Qian, Q. Challenges faced by underground projects construction safety and countermeasures. Chin. J. Rock Mech. Eng. 2012, 31, 1945–1956. [Google Scholar]
- Gong, X.N.; Zhang, X.C. Excavation collapse of Hangzhou subway station in soft clay and numerical investigation based on orthogonal experiment method. J. Zhejiang Univ.-Sci. A 2012, 13, 760–767. [Google Scholar] [CrossRef]
- Hsieh, P.G.; Ou, C.Y.; Lin, Y.L. Three-dimensional numerical analysis of deep excavations with cross walls. Acta Geotech. 2013, 8, 33–48. [Google Scholar] [CrossRef]
- Shi, J.W.; Ng, C.W.W.; Chen, Y.H. Three-dimensional numerical parametric study of the influence of basement excavation on existing tunnel. Comput. Geotech. 2015, 63, 146–158. [Google Scholar] [CrossRef]
- Guo, P.P.; Gong, X.N.; Wang, Y.X. Displacement and force analyses of braced structure of deep excavation considering unsymmetrical surcharge effect. Comput. Geotech. 2019, 113, 103102. [Google Scholar] [CrossRef]
- Ye, S.H.; Zhao, Z.F.; Wang, D.Q. Deformation analysis and safety assessment of existing metro tunnels affected by excavation of a foundation pit. Undergr. Space 2021, 6, 421–431. [Google Scholar] [CrossRef]
- Tarantola, A.; Valette, B. Generalized non-linear inverse problems solved using the least-squares criterion. Rev. Geophys. 1982, 20, 219–232. [Google Scholar] [CrossRef]
- Jin, Y.F.; Yin, Z.Y.; Zhou, W.H.; Huang, H.W. Multi-objective optimization-based updating of predictions during excavation. Eng. Appl. Artif. Intell. 2019, 78, 102–123. [Google Scholar] [CrossRef]
- Tao, Y.Q.; He, W.; Sun, H.L.; Cai, Y.Q.; Chen, J.Q. Multi-objective optimization-based prediction of excavation-induced tunnel displacement. Undergr. Space 2022, 7, 735–747. [Google Scholar] [CrossRef]
- Kim, S.; Finno, R.J. Inverse Analysis of a Supported Excavation in Chicago. J. Geotech. Geoenvironmental Eng. 2019, 145, 4019050. [Google Scholar] [CrossRef]
- Liu, C.Y.; Wang, Y.; Hu, X.M.; Han, Y.L.; Zhang, X.P.; Du, L.Z. Application of GA-BP Neural Network Optimized by Grey Verhulst Model around Settlement Prediction of Foundation Pit. Geofluids 2021, 2021, 5595277. [Google Scholar] [CrossRef]
- Sampson, J.R. Adaptation in Natural and Artificial Systems (John H. Holland); SIAM Review: Philadelphia, PA, USA, 1976; Volume 18, pp. 529–530. [Google Scholar]
- Levasseur, S.; Malecot, Y.; Boulon, M.; Flavigny, E. Statistical inverse analysis based on genetic algorithm and principal component analysis: Applications to excavation problems and pressuremeter tests. Int. J. Numer. Anal. Methods Geomech. 2010, 34, 471–491. [Google Scholar] [CrossRef]
- Hashash, Y.M.A.; Levasseur, S.; Osouli, A.; Finno, R.; Malecot, Y. Comparison of two inverse analysis techniques for learning deep excavation response. Comput. Geotech. 2010, 37, 323–333. [Google Scholar] [CrossRef]
- Yin, Z.Y.; Jin, Y.F.; Shen, J.S.; Hicher, P.Y. Optimization techniques for identifying soil parameters in geotechnical engineering: Comparative study and enhancement. Int. J. Numer. Anal. Methods Geomech. 2018, 42, 70–94. [Google Scholar] [CrossRef]
- Li, X.; Liu, X.; Li, C.Z.; Hu, Z.M.; Shen, G.Q.; Huang, Z.Y. Foundation pit displacement monitoring and prediction using least squares support vector machines based on multi-point measurement. Struct. Health Monit.-Int. J. 2019, 18, 715–724. [Google Scholar] [CrossRef]
- Zhang, C.; Li, J.Z.; He, Y. Application of optimized grey discrete Verhulst-BP neural network model in settlement prediction of foundation pit. Environ. Earth Sci. 2019, 78, 441. [Google Scholar] [CrossRef]
- Zhou, Y.; Li, S.Q.; Zhou, C.; Luo, H.B. Intelligent Approach Based on Random Forest for Safety Risk Prediction of Deep Foundation Pit in Subway Stations. J. Comput. Civ. Eng. 2019, 33, 5018004. [Google Scholar] [CrossRef]
- Zhao, Y.R.; Chen, X.S.; Hu, B.; Huang, L.P.; Lu, G.H.; Yao, H.L. Automatic monitoring and control of excavation disturbance of an ultra-deep foundation pit extremely adjacent to metro tunnels. Tunn. Undergr. Space Technol. 2023, 142, 105445. [Google Scholar] [CrossRef]
- Su, Y.Y.; Hashash, Y.M.A.; Liu, L.Y. Integration of construction as-built data via laser scanning with geotechnical monitoring of urban excavation. J. Constr. Eng. Manag. 2006, 132, 1234–1241. [Google Scholar] [CrossRef]
- Zhu, C.; Yan, Z.; Lin, Y.; Xiong, F.; Tao, Z. Design and Application of a Monitoring System for a Deep Railway Foundation Pit Project. IEEE Access 2019, 7, 107591–107601. [Google Scholar] [CrossRef]
- Hong, C.; Zhang, J.; Chen, W. An Integrated Intelligent Approach for Monitoring and Management of a Deep Foundation Pit in a Subway Station. Sensors 2022, 22, 8737. [Google Scholar] [CrossRef] [PubMed]
- Opoku, D.J.; Perera, S.; Osei-Kyei, R.; Rashidi, M. Digital twin application in the construction industry: A literature review. J. Build. Eng. 2021, 40, 102726. [Google Scholar] [CrossRef]
- Lin, J.R.; Zhang, J.P.; Zhang, X.Y.; Hu, Z.Z. Automating closed-loop structural safety management for bridge construction through multisource data integration. Adv. Eng. Softw. 2019, 128, 152–168. [Google Scholar] [CrossRef]
- Zhang, Y.Y.; Kang, K.; Lin, J.R.; Zhang, J.P.; Zhang, Y. Building information modeling-based cyber-physical platform for building performance monitoring. Int. J. Distrib. Sens. Netw. 2020, 16, 1550147720908170. [Google Scholar] [CrossRef]
- Shafto, M.; Conroy, M.; Doyle, R.; Glaessgen, E.; Kemp, C.; LeMoigne, J.; Wang, L. DREFT Modeling, Simulation, Information Technology and Processing Roadmap Technology Area 11; National Aeronautics and Space Administration: Washington, DC, USA, 2010.
- Grieves, M.; Vickers, J. Digital Twin: Mitigating Unpredictable, Undesirable Emergent Behavior in Complex Systems. In Transdisciplinary Perspectives on Complex Systems; Springer International Publishing: Cham, Switzerland, 2017; pp. 85–113. [Google Scholar]
- Tao, F.; Zhan, H.; Liu, A.; Nee, A.Y.C. Digital Twin in Industry: State-of-the-Art. Ieee Trans. Ind. Inform. 2019, 15, 2405–2415. [Google Scholar] [CrossRef]
- Callcut, M.; Agliozzo, J.P.C.; Varga, L.; McMillan, L. Digital Twins in Civil Infrastructure Systems. Sustainability 2021, 13, 11549. [Google Scholar] [CrossRef]
- Liu, X.; Sun, H.; Lin, J. Digital Selves Based Intelligent Construction Framework. Int. J. Crowd Sci. 2024, 8, 184–194. [Google Scholar] [CrossRef]
- Zheng, Z.; Liao, W.J.; Lin, J.R.; Zhou, Y.C.; Zhang, C.; Lu, X.Z. Digital Twin-Based Investigation of a Building Collapse Accident. Adv. Civ. Eng. 2022, 2022, 9568967. [Google Scholar] [CrossRef]
- Lin, J.R.; Wu, D.P. An approach to twinning and mining collaborative network of construction projects. Autom. Constr. 2021, 125, 103643. [Google Scholar] [CrossRef]
- Lin, C.; Hu, Z.Z.; Yang, C.; Deng, Y.C.; Zheng, W.; Lin, J.R. Maturity Assessment of Intelligent Construction Management. Buildings 2022, 12, 1742. [Google Scholar] [CrossRef]
- Jiang, C.; Li, X.; Lin, J.R.; Liu, M.; Ma, Z.L. Adaptive control of resource flow to optimize construction work and cash flow via online deep reinforcement learning. Autom. Constr. 2023, 150, 104817. [Google Scholar] [CrossRef]
- Jiang, F.; Ma, L.; Broyd, T.; Chen, K. Digital twin and its implementations in the civil engineering sector. Autom. Constr. 2021, 130, 103838. [Google Scholar] [CrossRef]
- Ye, Z.J.; Ye, Y.; Zhang, C.P.; Zhang, Z.M.; Li, W.; Wang, X.J.; Wang, L.; Wang, L.B. A digital twin approach for tunnel construction safety early warning and management. Comput. Ind. 2023, 144, 103783. [Google Scholar] [CrossRef]
- Sun, Z.; Li, H.; Bao, Y.; Meng, X.; Zhang, D. Intelligent Risk Prognosis and Control of Foundation Pit Excavation Based on Digital Twin. Buildings 2023, 13, 247. [Google Scholar] [CrossRef]
- Hsieh, P.G.; Ou, C.Y. Shape of ground surface settlement profiles caused by excavation. Can. Geotech. J. 1998, 35, 1004–1017. [Google Scholar] [CrossRef]
- Wang, J.H.; Xu, Z.H.; Wang, W.D. Wall and Ground Movements due to Deep Excavations in Shanghai Soft Soils. J. Geotech. Geoenvironmental Eng. 2010, 136, 985–994. [Google Scholar] [CrossRef]
- Schuster, M.; Kung, G.T.C.; Juang, C.H.; Hashash, Y.M.A. Simplified Model for Evaluating Damage Potential of Buildings Adjacent to a Braced Excavation. J. Geotech. Geoenvironmental Eng. 2009, 135, 1823–1835. [Google Scholar] [CrossRef]
- Calvello, M.; Finno, R.J. Selecting parameters to optimize in model calibration by inverse analysis. Comput. Geotech. 2004, 31, 411–425. [Google Scholar] [CrossRef]
- Finno, R.J.; Calvello, M. Supported excavations: Observational method and inverse modeling. J. Geotech. Geoenvironmental Eng. 2005, 131, 826–836. [Google Scholar] [CrossRef]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Stage No. | Stage Name | Excavation Activities |
|---|---|---|
| 1 | Add1 | Piles construction |
| 2 | Remove1 | Excavated to −2.12 m |
| 3 | Remove2 | Excavated to −4.12 m |
| 4 | Add2 | Anchor construction |
| 5 | Remove3 | Excavated to the bottom |
| Soil Layer | Depth (m) | γ (kN/m3) | E50ref (MPa) | Eoedref (MPa) | Eurref (MPa) | c′ (kPa) | ϕ′ (°) | K0 |
|---|---|---|---|---|---|---|---|---|
| 1 | 0~3 | 19.8 | 3700 | 3700 | 11,100 | 14 | 8 | 0.72 |
| 2 | 3~6 | 20.0 | 4600 | 4600 | 13,800 | 22 | 30 | 0.13 |
| 3 | 6~12 | 19.8 | 5900 | 5900 | 17,700 | 37 | 11 | 0.63 |
| 4 | 12~17 | 20.1 | 7000 | 7000 | 21,000 | 32 | 12 | 0.59 |
| 5 | 17~30 | 18.6 | 9100 | 9100 | 27,300 | 35 | 12 | 0.59 |
| Analysis | Measured Value | Initial Analysis | 1st Inverse Analysis | 2nd Inverse Analysis | 3rd Inverse Analysis | |
|---|---|---|---|---|---|---|
| Stage No. | ||||||
| Stage1 | 0 | N/A | N/A | N/A | N/A | |
| Stage2 | −2.22 | −20% | −1% | −25% | −8% | |
| Stage3 | −4.22 | −127% | −40% | −3% | −13% | |
| Stage4 | −4.44 | −98% | −15% | −16% | −9% | |
| Stage5 | −12.75 | −73% | −8% | −17% | −19% | |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Pan, P.; Sun, S.-H.; Feng, J.-X.; Wen, J.-T.; Lin, J.-R.; Wang, H.-S. Intelligent Monitoring System for Deep Foundation Pit Based on Digital Twin. Buildings 2025, 15, 366. https://doi.org/10.3390/buildings15030366
Pan P, Sun S-H, Feng J-X, Wen J-T, Lin J-R, Wang H-S. Intelligent Monitoring System for Deep Foundation Pit Based on Digital Twin. Buildings. 2025; 15(3):366. https://doi.org/10.3390/buildings15030366
Chicago/Turabian StylePan, Peng, Shuo-Hui Sun, Jie-Xun Feng, Jiang-Tao Wen, Jia-Rui Lin, and Hai-Shen Wang. 2025. "Intelligent Monitoring System for Deep Foundation Pit Based on Digital Twin" Buildings 15, no. 3: 366. https://doi.org/10.3390/buildings15030366
APA StylePan, P., Sun, S.-H., Feng, J.-X., Wen, J.-T., Lin, J.-R., & Wang, H.-S. (2025). Intelligent Monitoring System for Deep Foundation Pit Based on Digital Twin. Buildings, 15(3), 366. https://doi.org/10.3390/buildings15030366