Economic, Social Impacts and Operation of Smart Factories in Industry 4.0 Focusing on Simulation and Artificial Intelligence of Collaborating Robots


Abstract
:1. Introduction
2. Literature Review
Pillars of Industry 4.0
- Multi-Agent Systems (MAS) can be intelligent smart machines, collaborating robots, sensors, controllers, etc., that are communicating with the production control system and the smart workpieces, so that machines coordinate, control, and optimize themselves and the whole production process.
- Autonomous Robots are intelligent industrial robots that can cooperate and collaborate with each other during manufacturing in order to perform more complex tasks with higher efficiency.
- Artificial Intelligence is the ability of robots to learn and think logically and autonomously, not only depending on programs written by people.
- System Integration means the optimal reconfiguration of the connecting Cyber Physical Systems, which can be sensors, actuators, etc. (vertical integration); and the optimal operation of the whole supply chain including suppliers, manufacturers, service providers, etc. (horizontal integration).
- Big data means the huge amount of information required for the optimal operation of the intelligent network-like systems. The collection, analysis and evaluation of this data set are essential for real-time decision making.
- Simulation tools are used for optimization of production processes and maximal utilization of resources. Simulation is an efficient method for modeling deterministic and stochastic processes and supporting decision making.
- Cyber Security includes technologies that are developed to protect systems, networks and data from cyber-attacks.
- Cloud Computing provides unlimited computing power to transfer, store and analyze the huge amount of data required for the optimal operation of systems.
- Additive Manufacturing is an innovative technology to build three-dimensional objects by adding layer upon layer of a given material. This 3D printing technology provides the possibility of manufacturing more complex and unique components and products, which is needed for more flexible and unique production.
- Augmented Reality provides the possibility of visualization of manufacturing processes by transforming the real environment to a virtual environment.
- Internet of Things (IoT) technology allows objects (e.g., machines, vehicles, products or other devices) to communicate and interact with each other. IoT provides the network connection and data exchange of objects.
3. Concept of Smart Factory
3.1. Economic and Social Operational Requirements of Smart Factories
3.1.1. Economic Requirements from Aspects of Smart Production, Services, Customers and Government Economic Policy
- Smart Factories can be established where governments support the establishment and operation of factories applying Industry 4.0 technology by advantageous fiscal and economic policies (tax allowances, other financial support, etc.).
- A requirement of the operation of Smart Factories is the establishment of an essential and adequate infrastructural background, especially focusing on multimodal transport possibilities (road, rail, water, air) and further joining services.
- Smart Factories have to establish the essential and adequate logistical services related to production (transportation, warehousing, other value adding services, etc.).
- In Smart Factories the traditional centrally controlled production processes have to be changed to decentralized control, in which the intelligent machines, robots, tools and intelligent workpieces communicate and collaborate with each other continuously by sensors.
- Stability and reliability have to be provided in the communication between machines and between machines and workers using IoT.
- Cyber security has to be ensured, which includes technologies to protect systems, networks and data from cyber-attacks.
- All physical assets of the production have to be digitized and automatized, providing the integrity of production processes.
- Digital Supply Chains have to be created using IoT.
- Factories have to become self-organizing, self-regulating and self-adapting in order to optimize their own operations. Factories have to control and optimize their own decisions by analyzing processes and finding optimal solutions.
- Interoperability, virtualization, decentralization, real-time capability, and modularity have to be created in the production systems and processes.
- Productivity, flexibility, resource utilization and sustainability have to be improved in order to improve competitiveness and achieve intelligent production providing the required product quality, minimal production cost, and minimal lead-time.
- The production has to be more customer-oriented, because the customers require more complex and unique products in larger quantities in shorter lead times.
3.1.2. Social Requirements from the Aspects of Employment Market, Safety and Labor Law of Workers
- A highly skilled labor force will be needed for the programming and operation of the intelligent devices in Smart Factories. The number of those workers will be reduced, replaced by intelligent devices.
- An adequate number of specialized and well-trained workers have to be employed for all of tasks in order to maintain jobs and create new jobs.
- Workplace safety and labor law protection have to be provided for the workers:
- ⚬
- Workplaces and manufacturing technologies have to be safe for employees and for the environment. Risks that could affect workers have to be reduced and chemicals and physical hazards have to be eliminated.
- ⚬
- Human rights, labor laws and safety-at-work rules have to be in compliance.
- ⚬
- Workers have to be trained for the concept of Industry 4.0 to find optimal solutions in normal and abnormal production situations.
- ⚬
- More attractive levels of income and additional allowances have to be provided for the workers.
- ⚬
- Workers have to be motivated to improve their efficiency and creativity by several means (e.g., providing opportunities for training and for advancement; additional allowances; improving job satisfaction of workers).
- ⚬
- Efficient cooperation has to be created between the management and the Trade Unions of employees.
3.2. Economic and Social Impacts of Smart Factories
3.2.1. Economic Impacts of Smart Factories on Production, Services, Final Products, Customers and Government Economic Policy
- In Smart Factories the traditional centrally controlled production processes will be changed to decentralized control, in which the intelligent machines, robots and intelligent workpieces communicate and collaborate with each other continuously.
- Factories will be self-organizing, self-regulating and self-adapting, thereby their operations can be optimized.
- Smart Factories will be more productive, flexible, sustainable and competitive.
- Utilization of machine and human resources will be higher.
- Production and joining services will be more flexible and customer-oriented in order to adapt to more unique and rapidly changing customers’ demands, because the customers require more complex and more unique final products.
- Due to the intelligent production, which will result in high quality unique final products, custom-designed product/service portfolios, short production lead time, and delivery time, the satisfaction of customers will increase.
- Final products will be cost-efficient, durable; produced by innovative manufacturing technologies, business processes that use energy and material resources efficiently.
- Continuous performance measurement and evaluation of production processes will result in efficiency improvement and the reduction of operational costs.
- Companies will gain higher income and profit, which provide the possibility of investment in new high-tech and environmental-friendly technologies and continuous development of the infrastructure and joining services (transportation, warehousing, other value adding services).
- The operation of Smart Factories will result in the continuous development of the infrastructure, which will be advantageous not only for the companies, but at the same time for the entire region.
- Final products will be environmentally friendly, renewable resources will be used during the manufacturing. Recycling of wastes can be provided.
- Smart Factories will provide sustainable production in the long term from economic, environmental and social aspects.
- Due to the operation of Smart Factories, tax revenue for governments will increase. Thereby the governments can support the factories by more tax allowances and other financial support in order to encourage the use of more high-tech and environmental-friendly technologies, to create more new jobs and to realize higher profit.
3.2.2. Social Impacts of Smart Factories on the Employment Market, Safety and Labor Law of Workers and Educational System
- Due to factories becoming automatized and self-organized, self-regulated and self-adapted, the employment market will be transformed. On the one hand, some workers can be replaced by intelligent devices, so the number of less skilled workers will be reduced. On the other hand, a highly skilled labor force will be needed for the programming and operation of the intelligent devices, because Smart Factories require well-trained workers.
- Based on the before mentioned facts, specialized and well trained workers have to be employed for all tasks, which may maintain jobs and create new jobs, which may result in the reduction of the unemployment rate.
- Workers will be more motivated because they can get higher incomes and additional allowances; furthermore, they have opportunities for training and for advancement. Therefore, their job satisfaction will be increased.
- Well-trained workers will find optimal solutions in both normal and abnormal production situations.
- Efficient cooperation will be created between the management of Smart Factories and the Trade Unions of employees, which will also improve the satisfaction of the workers.
- Smart Factories will provide sustainable production also from social aspects:
- ⚬
- Safety for workers will be provided: compliance with human rights, labor laws and safety-at-work rules. Workplaces and technologies will be safer for the environment, eliminate or minimize chemicals and physical hazards, and reduce the risks of workers.
- ⚬
- Workers will be provided the possibility to improve their efficiency and creativity and participate in operational decision making, while opportunities for training and advancement will be also provided.
- Educational system will be reorganized to train a specialized, highly skilled labor force according to the requirements of Smart Factories (Hariharasudan and Kot 2018). IT knowledge will become more important in the future; therefore, the IT competencies of future employees have to be developed from the beginning of elementary school (establishment of digital schools).
3.3. Comparison of Characteristics of the Traditional Factory and Smart Factory
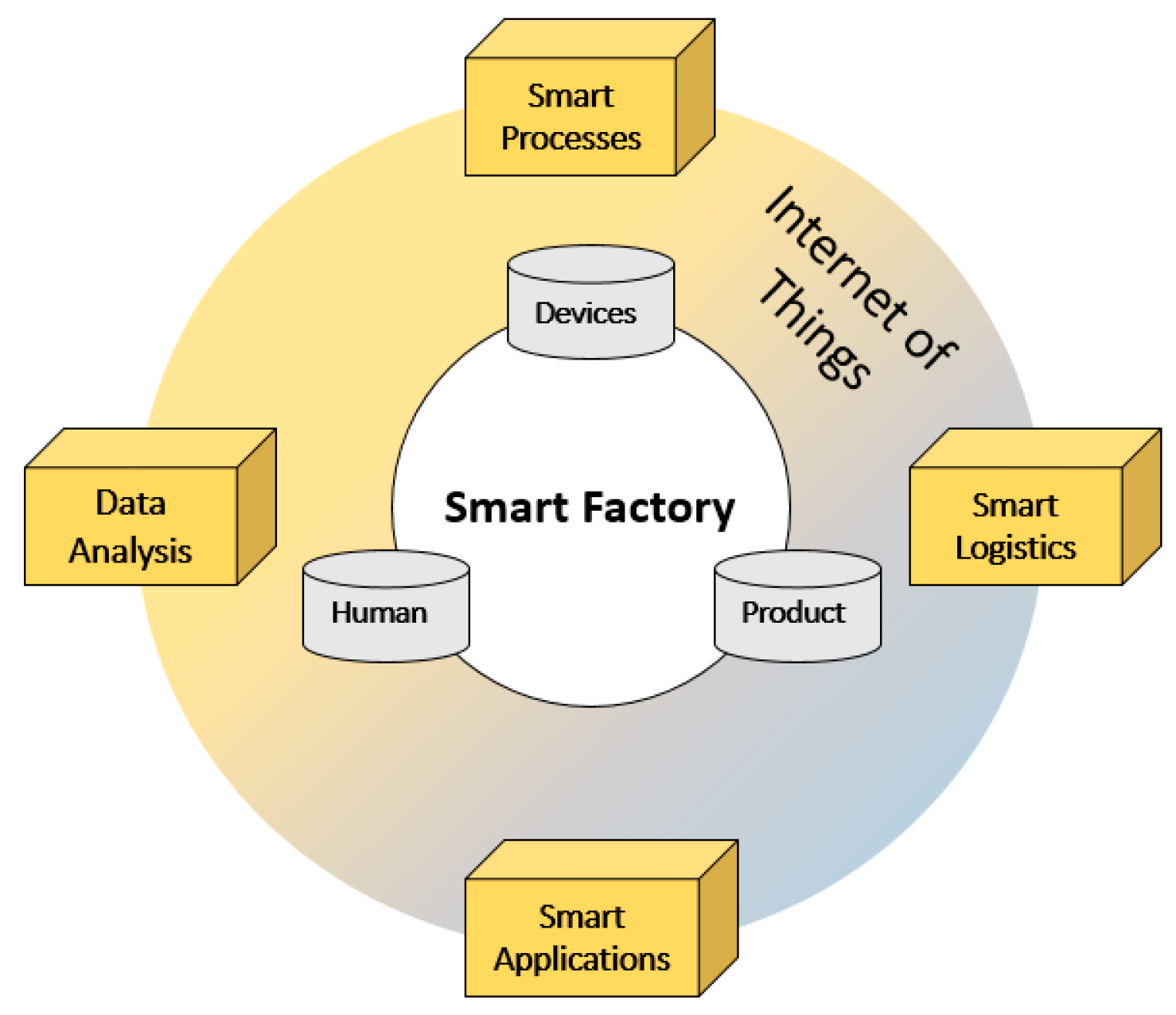
3.4. Main Elements of a Smart Factory
- The first part of the Smart Factory is made up of Smart Devices, i.e., Multi-Agent Systems (MAS) which can be formed by intelligent industrial robots, sensors, controllers, and CNC machines cooperating together to create flexible and competitive production processes and the joining logistical services.
- The second part of the Smart Factory is the humans. One group is the workers who create and apply the elements of Industry 4.0 concept (e.g., Smart Devices and communication network), which requires high IT, production and logistical knowledge. The second group is the customers, who can define the specification of their Smart Products to be produced due to the application of IoT technology. Thereby, customers can participate in the production design processes.
- The third part of the Smart Factory is the Smart Products (workpieces and final products), which sense the production environment with internal sensors and control and monitor their own production processes by communicating with Smart Devices.
4. Multi-Agent Systems in the Smart Factory
- Machining Agents (MA) perform a manufacturing or testing operations, e.g., a CNC machine, 3D printer or robots,
- Transport Agents (TA) are responsible for transportation of products, such as conveyors, AGVs, etc.,
- Product Agents (PA): Smart Products that are produced by intelligent manufacturing systems and are able to communicate with the machining and t transport Agents,
- Supplementary Agents (SA): e.g., buffers that temporarily store Product Agents.
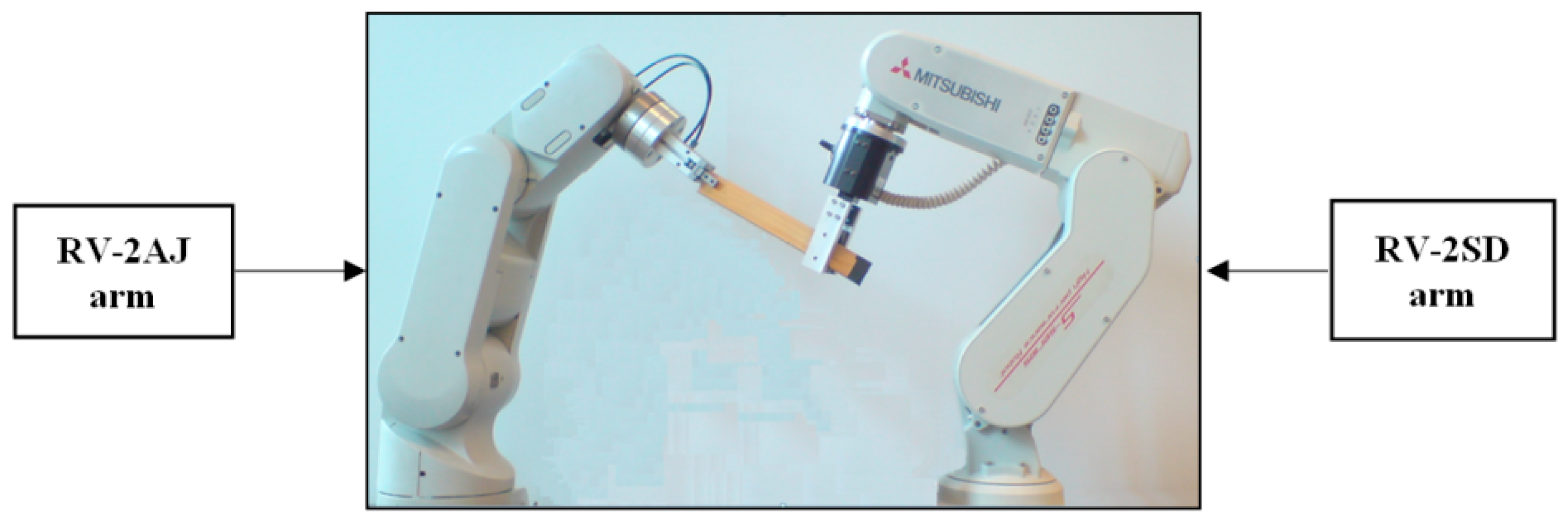
4.1. Collaborating Robots in Smart Factory
4.2. Operational Strategies in a Smart Factory with Collaborating Robots
- Normal Scenario: When all of the manufacturing elements work correctly, agents (e.g., robots) collaborate and communicate together to achieve tasks according to a production plan. In this scenario each agent controls its own activity.
- Abnormal Scenario: When a problem occurs in a production line which is caused by any of agents, this results in an operational problem in the manufacturing system i.e., malfunction, lost data or defective products. This abnormal situation can create many further economic problems.
- Simulation: Simulation is an efficient tool of Industry 4.0, which provides the modeling and visualization of the manufacturing processes of the Smart Factory in order to avoid problems and achieve more flexible and more efficient production.
- Artificial Intelligence: AI is the ability of robots to learn and think logically and autonomously, not only depending on programs written by people, but also independently. AI helps to create smart manufacturing environment where agents adapt to critical situations faster and make optimal decisions.
5. Role of Simulation Tools and AI in Improving Efficiency of Smart Factory
5.1. Simulation
5.2. Artificial Intelligence
- AI is a diverse field of scientific methods and includes several main technologies and techniques (Table 2).
6. Case Study
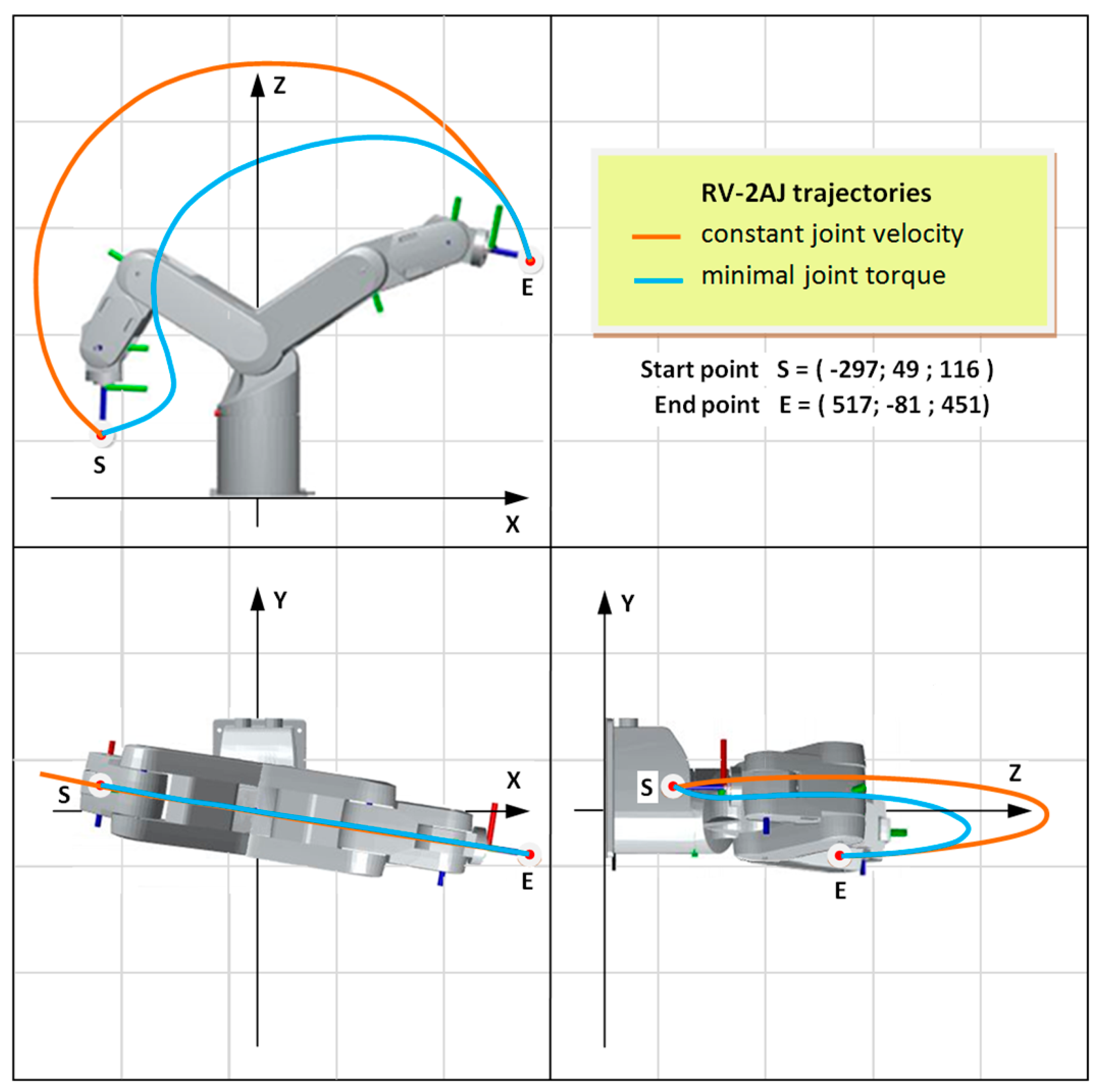
6.1. The Task
6.2. Robot Modeling
- Simscape Multibody link: This module allows synchronization between SolidWorks and MATLAB Simulink. Using this MATLAB add-on to convert RV-2AJ 3D model file to a Simscape model is automatic in XML format (Figure 7), so all the modules and robot parameters are presented in the MATLAB Simulink. Simscape is part of the toolbox of Simulink that is intended for modeling different engineering processes; the Mechanical and Multibody modules are suitable for our goals.
- Creating URDF file: In SolidWorks we can also create an URDF file as shown in Figure 8. This type of file regroups all the parameters of the robot (Links-Joints-Type of Joints-Coordinate systems-Inertia matrix-Joints limits). A URDF file can be executed in MATLAB software and also in many other simulation software.
6.3. Simulation via MATLAB
| Algorithm 1. Cycle Time Minimization Algorithm. | |
| algorithm Cycle-time determination is | |
| input: | RigidBodyTree Object RBT, |
| starting pose of the robot sp, | |
| trajectory definition data td, | |
| starting cycle time sct, | |
| starting time step sts, | |
| ending time step ets | |
| output: | Expected cycle time ct such that time step ts ≤ ending time step ets and the joints torque maximums mt[j] ≤ allow torques at[j] for every joint j. |
| ts ← sts ct ← sct + ts do torque overload flag tof ← No ct ← ct - ts for each joint j in Joints do for every time point i in TimePoints do calculate torque[j][i] mt[j] ← maxi torque[j][i] if mt[j] > at[j] tof ← Yes if tof = Yes ct ← ct + ts ts ← ts/2 while ts > ets or tof = Yes return ct | |
7. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Ahuett-Garza, Horacio, and Thomas-R. Kurfess. 2018. A brief discussion on the trends of habilitating technologies for Industry 4.0 and Smart Manufacturing. Manufacturing Letters 15: 60–63. [Google Scholar] [CrossRef]
- Al-Mashhadany, Yousif Ismaill. 2010. Inverse Kinematics Problem (IKP) of 6-DOF Manipulator by Locally Recurrent Neural Networks (LRNNs). Paper presented at International Conference on Management and Service Science, Wuhan, China, August 24–26. [Google Scholar]
- Amodu, Oluwatosin Ahmed, and Mohamed Othman. 2018. Machine-to-Machine communication: An overview of opportunities. Computer Networks 145: 255–76. [Google Scholar] [CrossRef]
- Ayob, Mohammad Afif, Wan Nurshazwani, Wan Zakaria Wan Nurshazwani, and Jamaludin Jalan. 2014. Forward Kinematics Analysis of a 5-Axis RV-2AJ Robot Manipulator. Paper presented at Electrical Power, Electronics, Communications, Controls and Informatics Seminar, Malang, Indonesia, August 27–28. [Google Scholar]
- Ayob, Mohammad Afif, Wan Nurshazwani, Wan Zakaria Wan Nurshazwani, Jamaludin Jalani, and Mohd Razali Md Tomari. 2015a. Inverse kinematics analysis of a 5-axis RV-2AJ robot manipulator. Journal of Engineering and Applied Sciences 10: 8388–94. [Google Scholar]
- Ayob, Mohammad Afif, Wan Nurshazwani Wan Zakaria, Jamaludin Jalani, and Mohd Razali Md Tomari. 2015b. Modeling and simulation of a 5-axis RV-2AJ robot using simmechanics. Journal Teknologi 76: 59–63. [Google Scholar] [CrossRef]
- Ballagi, Ákos, and László T. Kóczy. 2008. Fuzzy Signature Based Mobile Robot Motion Control System. Paper presented at the 5th Slovakian—Hungarian Joint Symposium on Applied Machine Intelligence, Herlany, Slovakia, January 21–22. [Google Scholar]
- Ballagi, Ákos, and László T. Kóczy. 2010. Robot Cooperation by Fuzzy Signature Sets Rule Base. Paper presented at 8th International Symposium on Applied Machine Intelligence and Informatics, Herlany, Slovakia, January 28–30. [Google Scholar]
- Ballagi, Ákos, László T. Kóczy, and Claudiu R. Pozna. 2014. Intelligent robot cooperation with fuzzy communication. In Issues and Challenges of Intelligent Systems and Computational Intelligence. Studies in Computational Intelligence. Edited by László T. Kóczy, Claudiu R. Pozna and Janusz Kacprzyk. Berlin/Heidelberg: Springer, vol. 530, pp. 185–97. [Google Scholar]
- Chen, Yuan, Guangying Ma, Shuxia Lin, and Jun Gao. 2012. Adaptive fuzzy computed-torque control for robot manipulator with uncertain dynamics. International Journal of Advanced Robotic Systems 9: 201–9. [Google Scholar] [CrossRef]
- Chen, Yuan, Guifu Mei, Guangying Ma, Shuxia Lin, and Jun Gao. 2014. Robust adaptive inverse dynamics control for uncertain robot manipulator. International Journal of Innovative Computing, Information and Control 10: 575–87. [Google Scholar]
- Coman, Micrea, Stan Stefan, Manic Milos, and Balan Radu. 2009. Design, Simulation and Control in Virtual Reality of a RV-2AJ Robot. Paper presented at the 35th Annual Conference of IEEE Industrial Electronics, Porto, Portugal, November 3–5. [Google Scholar]
- Corke, Peter Ian, Peterson Roland, and Rus Daniela. 2005. Localization and navigation assisted by cooperating networked sensors and robots. International Journal of Robotics Research 24: 771–86. [Google Scholar] [CrossRef]
- Cservenák, Ákos, Makó Ildikó, and Csáki Tibor. 2014. Creating a virtual robotic cell with robotexpert software system. Paper presented at the 28th International Multidisciplinary Scientific Conference, Miskolc, Hungary, April 10–11. [Google Scholar]
- Dorigo, Marco, and Erol Sahin. 2004. Guest editorial: Swarm robotics. Autonomous Robotics 17: 111–13. [Google Scholar] [CrossRef]
- Dudás, László. 2010. Advanced software tool for modelling and simulation of new gearings. International Journal of Design Engineering 3: 289–310. [Google Scholar] [CrossRef]
- Dudás, László. 2011. Applied Artificial Intelligence. Miskolc: Institute of Information Science and Technologies, p. 120. (In Hungarian) [Google Scholar]
- Gubán, Miklós, Kovács György, and Kot Sebastian. 2017. Simulation of complex logistical service processes. Management and Production Engineering Review 8: 19–29. [Google Scholar] [CrossRef]
- Hariharasudan, A., and Sebastian Kot. 2018. A scoping review on digital English and Education 4.0 for Industry 4.0. Social Sciences 7: 227. [Google Scholar] [CrossRef]
- Hernández, Luis, Carlos Baladron, Javier M. Aguiar, Belén Carro, Antonio Sanchez-Esguevillas, Jaime Lloret, David Chinarro, Jorge J. Gomez-Sanz, and Diane Cook. 2013. A multi-agent system architecture for smart grid, Management and forecasting of energy demand in virtual power plants. IEEE Communications Magazine 51: 106–13. [Google Scholar] [CrossRef]
- Hu, Yunfeng, Yu Dong, and Batunacun. 2018. An automatic approach for land-change detection and land updates based on integrated NDVI timing analysis and the CVAPS method with GEE support. ISPRS Journal of Photogrammetry and Remote Sensing 146: 347–59. [Google Scholar] [CrossRef]
- Jay, Lee, Behrad Bagheri, and Hung An Kao. 2015. A Cyber Physical Systems architecture for Industry 4.0—Based manufacturing systems. Manufacturing Letters 3: 18–23. [Google Scholar]
- Kaddoum, Elsy. 2008. Auto-Régulation du Contrôle Manufacturier par Système Multi-agent Auto-Organisateur. Master Thesis, Université Paul Sabatier, Toulouse, France, June 9. [Google Scholar]
- Kóczy, László T., and Ákos Ballagi. 2009. Fuzzy Communication and Cooperation of Mobile Robots. Paper presented at the 3rd International Workshop on Soft Computing Applications, Arad, Romania, July 29–August 1. [Google Scholar]
- Kostál, Peter, Kiss Imre, and Kerak Petar. 2011. The intelligent fixture at flexible manufacturing. Annals of the Faculty of Engineering Hunedoara—International journal of Engineering 9: 197–200. [Google Scholar]
- Kot, Sebastian. 2018. Sustainable supply chain management in small and medium enterprises. Sustainability 10: 1143. [Google Scholar] [CrossRef]
- Kovács, György, and Sebastian Kot. 2016. New logistics and production trends as the effect of global economy changes. Polish Journal of Management Studies 14: 121–34. [Google Scholar] [CrossRef]
- Kovács, György, and Sebastian Kot. 2017. Economic and social effects of novel supply chain concepts and virtual enterprises. Journal of International Studies 10: 237–54. [Google Scholar] [CrossRef]
- Lee, Jay, Davari Hossein, Singh Jaskaran, and Pandhare Vibhor. 2018. Industrial Artificial Intelligence for industry 4.0-based manufacturing systems. Manufacturing Letters 18: 20–23. [Google Scholar] [CrossRef]
- Maged, M. Abou Elyazed, Mohamed H. Mabrouk, Mootaz E. Abo Elnor, and Hussein M. Mahgoub. 2015. Trajectory planning of five DOF manipulator: Dynamic feed forward controller over computed torque controller. International Journal of Engineering Research & Technology 4: 401–6. [Google Scholar]
- Faber, Marco, Jennifer Bützler, and Christopher M. Schlic. 2015. Human-robot cooperation in future production systems: Analysis of requirements for designing an ergonomic work system. Procedia Manufacturing 3: 510–17. [Google Scholar] [CrossRef]
- Momen, Sifat, and Amanda Sharkey. 2009. An Ant-like Task Allocation Model for a Swarm of Heterogeneous Robots. Paper presented at the 2nd Swarm Intelligence Algorithms and Applications Symposium, Brighton, UK, April 6–9. [Google Scholar]
- Nasser, Jazdi. 2014. Cyber Physical Systems in the Context of Industry 4.0. Paper presented at IEEE International Conference on Automation, Quality and Testing, Robotics, Cluj-Napoca, Romania, May 22–24. [Google Scholar]
- Noha, Mostafa, Walaa Hamdy, and Hisham Alawady. 2019. Impacts of Internet of Things on supply chains: A framework for warehousing. Social Sciences 8: 1–10. [Google Scholar]
- O’Hara, Keith, and Tucker Balch. 2004. Pervasive Sensor-less Networks for Cooperative Multirobot Tasks. Paper presented at the 7th International Symposium on Distributed Autonomous Robot Systems, Toulouse, France, June 23–25. [Google Scholar]
- Peng, Wei, Zonling Lin, and Jianbo Su. 2009. Computed torque control-based composite nonlinear feedback controller for robot manipulators with bounded torques. IET Control Theory and Application 3: 701–11. [Google Scholar] [CrossRef]
- Piltan, Farzin, Emamzadeh Sara, Hivand Zahra, and Shahriyari Forouzan. 2012. PUMA-560 robot manipulator position computed torque control methods using matlab/simulink and their integration into graduate nonlinear control and matlab courses. International Journal of Robotics and Automation 3: 106–50. [Google Scholar]
- Romenda, Roland, Virág Zoltán, and Magyar Tamás. 2018. Separation processing methods of waste electronic and electronical equipment. Annals of the University of Petrosani: Mechanical Engineering 20: 73–78. [Google Scholar]
- Rüsmann, Michael, Lorenz Markus, Gerbert Philipp, Waldner Manuel, Justus Jan, Engel Pascal, and Harnisch Michael. 2015. Industry 4.0: The Future of Productivity and Growth in Manufacturing Industries. Boston: The Boston Consulting Group. [Google Scholar]
- Sciavicco, Lorenzo, and Bruno Siciliano. 2000. Modeling and Control of Robot Manipulators. London: Springer. [Google Scholar]
- Sekala, Agnieszka, Gwiazda Aleksander, Kost Gabriel, and Waclaw Banas. 2018. Modelling of a production system using the multi-agent network approach. IOP Conference Series Materials Science and Engineering 400: 052009. [Google Scholar] [CrossRef]
- Shrouf, Fadi, Joaquin Ordieres, and Giovanni Miragliotta. 2014. Smart factories in Industry 4.0: A review of the concept and of energy management approached in production based on the Internet of Things paradigm. Paper presented at IEEE International Conference on Industrial Engineering and Engineering Management, Malaysia, December 9–12. [Google Scholar]
- Šljivo, Adnan, and Malik Čabaravdić. 2013. Simulation of a 5-axis RV-2AJ Robot. Paper presented at the 17th International Research/Expert Conference on Trends in the Development of Machinery and Associated Technology, Istanbul, Turkey, September 10–11. [Google Scholar]
- Smit, Jan, Kreutzer Stephan, Moeller Carolin, and Carlberg Malin. 2016. Industry 4.0 a study for the European Parliament. In The European Parliament’s Committee on Industry, Research and Energy. Brussels: European Parliament, pp. 1–94. [Google Scholar]
- Stock, Tim, and Guenther Seliger. 2016. Opportunities of sustainable manufacturing in Industry 4.0. Procedia CIRP 40: 536–41. [Google Scholar] [CrossRef]
- Straka, Martin, Žatkovič Erik, and Schréter Róbert. 2014. Simulation as a means of activity streamlining of continuously and discrete production in specific enterprise. Acta Logistica—International Scientific Journal 1: 11–16. [Google Scholar] [CrossRef]
- Sung, Tae Kyung. 2017. Industry 4.0: A Korea perspective. Technological Forecasting and Social Change 132: 40–45. [Google Scholar] [CrossRef]
- Sunil, Luthra, and Kumar Mangla Sachin. 2018. Evaluating challenges to Industry 4.0 initiatives for supply chain sustainability in emerging economies. Process Safety and Environmental Protection 117: 168–79. [Google Scholar]
- Urbański, Mariusz, Haque Adnan Ui, and Oino Isaiah. 2019. The moderating role of risk management in project planning and project success: Evidence from construction businesses of Pakistan and the UK. Engineering Management in Production and Services 11: 23–35. [Google Scholar] [CrossRef]
- Vaidya, Saurabh, Ambad Prashant, and Bhosle Santosh. 2018. Industry 4.0—A Glimpse. Procedia Manufacturing 20: 233–38. [Google Scholar] [CrossRef]
- Virág, Zoltán, and Sándor Szirbik. 2012. Examination of an optimized replaceable cutting tooth of excavator. Geosciences and Engineering: A Publication of the University of Miskolc 1: 337–42. [Google Scholar]
- Wang, Shiyong, Jiafu Wan, Di Li, and Chunhua Zhang. 2016a. Implementing Smart Factory of Industrie 4.0: An Outlook. International Journal of Distributed Sensor Networks 2016: 3159805. [Google Scholar] [CrossRef]
- Wang, Shiyong, Jiafu Wan, Daqiang Zhang, Di Li, and Chunhua Zhang. 2016b. Towards smart factory for industry 4.0: A self-organized multi-agent system with big data based feedback and coordination. Computer Networks 101: 158–68. [Google Scholar] [CrossRef]
- Xu, Jie, Huang Edward, Hsieh Liam, Lee Loo Hay, Jia Qing-Shan, and Chen Chun-Hung. 2016. Simulation optimization in the era of Industrial 4.0 and the Industrial Internet. Journal of Simulation 10: 310–20. [Google Scholar] [CrossRef]
- Yaskevich, Nikita. 2014. Recursive Algorithm for Simulation of Single Chain Manipulator Dynamics. Paper presented at the IEEE/ASME International Conference on Mechatronic and Embedded Systems and Applications, Ancona, Italy, September 10–12. [Google Scholar]
- Zhong, Ray-Y., Xun Xu, Eberhard Klotz, and Stephen Thomas Newman. 2017. Intelligent manufacturing in the context of Industry 4.0. A Review Engineering 3: 616–30. [Google Scholar] [CrossRef]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Traditional Factory | Smart Factory |
|---|---|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| AI Methods | Role Specification |
|---|---|
| Artificial Neural Networks | Generally used to carry out real-time flexible pattern recognition in industry using a variety of sensors. ANN can analyze very large amounts of data in real time and offer concrete answers to problems that may arise from the production process. Generalization and self-learning capabilities are used in handling modified conditions and scenarios. |
| Machine Learning | The ability of robots to learn from experience, to improve their performance and to adapt their behavior to new and changing environment. |
| Logic-Based AI | Knowledge representation and inference in all tasks and decision situations treated by the AI where binary logic is sufficient, like making a decision on starting an investment. |
| Fuzzy Logic | Imitation of the way of decision making in humans that involves all intermediate possibilities between the extreme values YES and NO. Mainly used in process control to make it more flexible. |
| Evolutionary and Genetic Algorithm | Very robust methods that can be used almost everywhere in quasi-optimum searching when time is not critical and model formulation is problematic |
| Methods inspired by living creatures, like Swarm Intelligence | Creation of multi-agent systems and complex structures characterized by self-reorganization and collective behavior planning and decision making capability |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Benotsmane, R.; Kovács, G.; Dudás, L. Economic, Social Impacts and Operation of Smart Factories in Industry 4.0 Focusing on Simulation and Artificial Intelligence of Collaborating Robots. Soc. Sci. 2019, 8, 143. https://doi.org/10.3390/socsci8050143
Benotsmane R, Kovács G, Dudás L. Economic, Social Impacts and Operation of Smart Factories in Industry 4.0 Focusing on Simulation and Artificial Intelligence of Collaborating Robots. Social Sciences. 2019; 8(5):143. https://doi.org/10.3390/socsci8050143
Chicago/Turabian StyleBenotsmane, Rabab, György Kovács, and László Dudás. 2019. "Economic, Social Impacts and Operation of Smart Factories in Industry 4.0 Focusing on Simulation and Artificial Intelligence of Collaborating Robots" Social Sciences 8, no. 5: 143. https://doi.org/10.3390/socsci8050143
APA StyleBenotsmane, R., Kovács, G., & Dudás, L. (2019). Economic, Social Impacts and Operation of Smart Factories in Industry 4.0 Focusing on Simulation and Artificial Intelligence of Collaborating Robots. Social Sciences, 8(5), 143. https://doi.org/10.3390/socsci8050143