
Adaptive Cuckoo Search-Extreme Learning Machine Based Prognosis for Electric Scooter System under Intermittent Fault



Abstract
:1. Introduction
2. DBG Based FDI for Electric Scooter
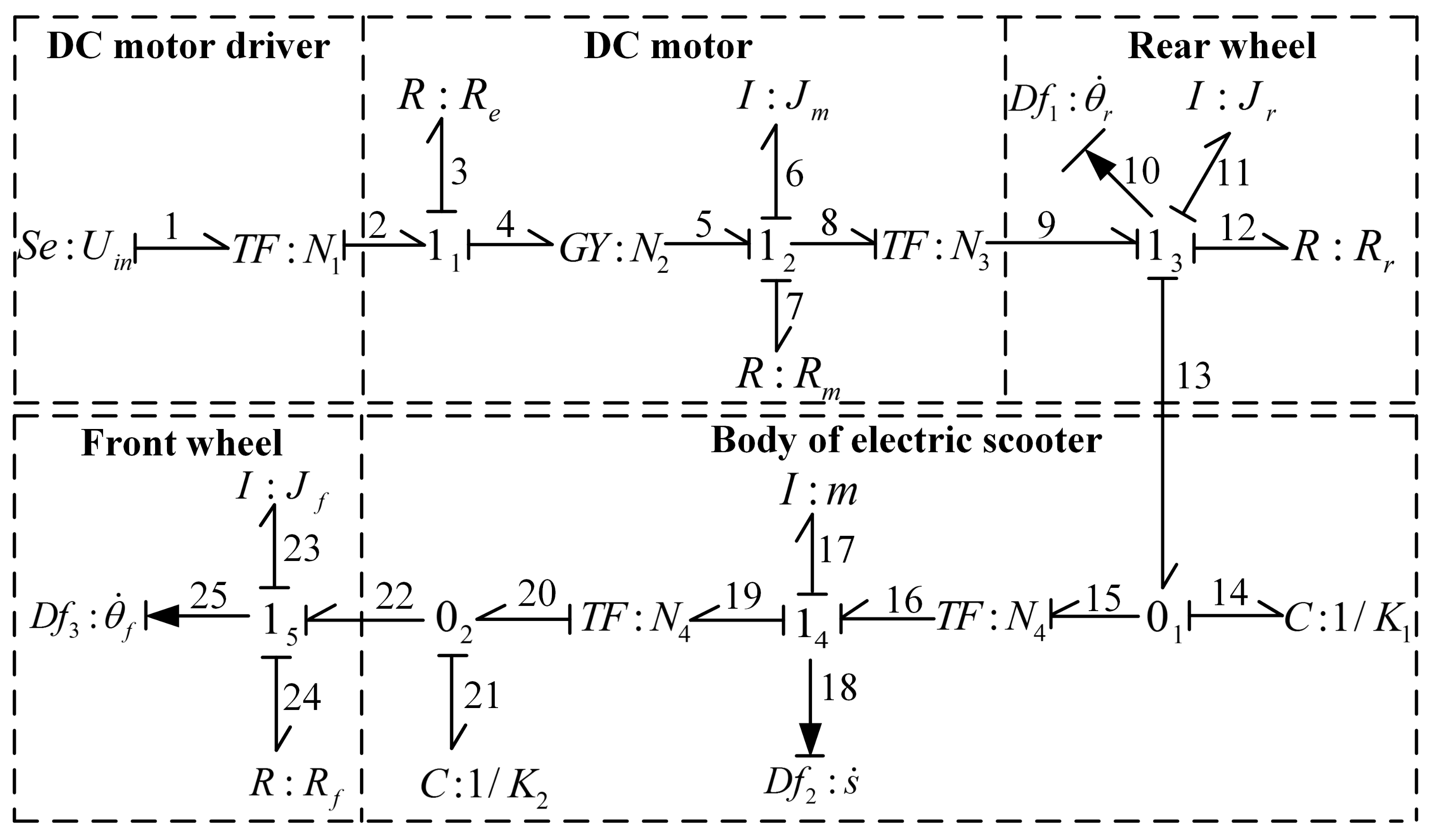
2.1. DBG Model of Electric Scooter
2.2. FDI Method
3. Distributed Intermittent Fault Estimation
3.1. Parameterization of Intermittently Faulty Component
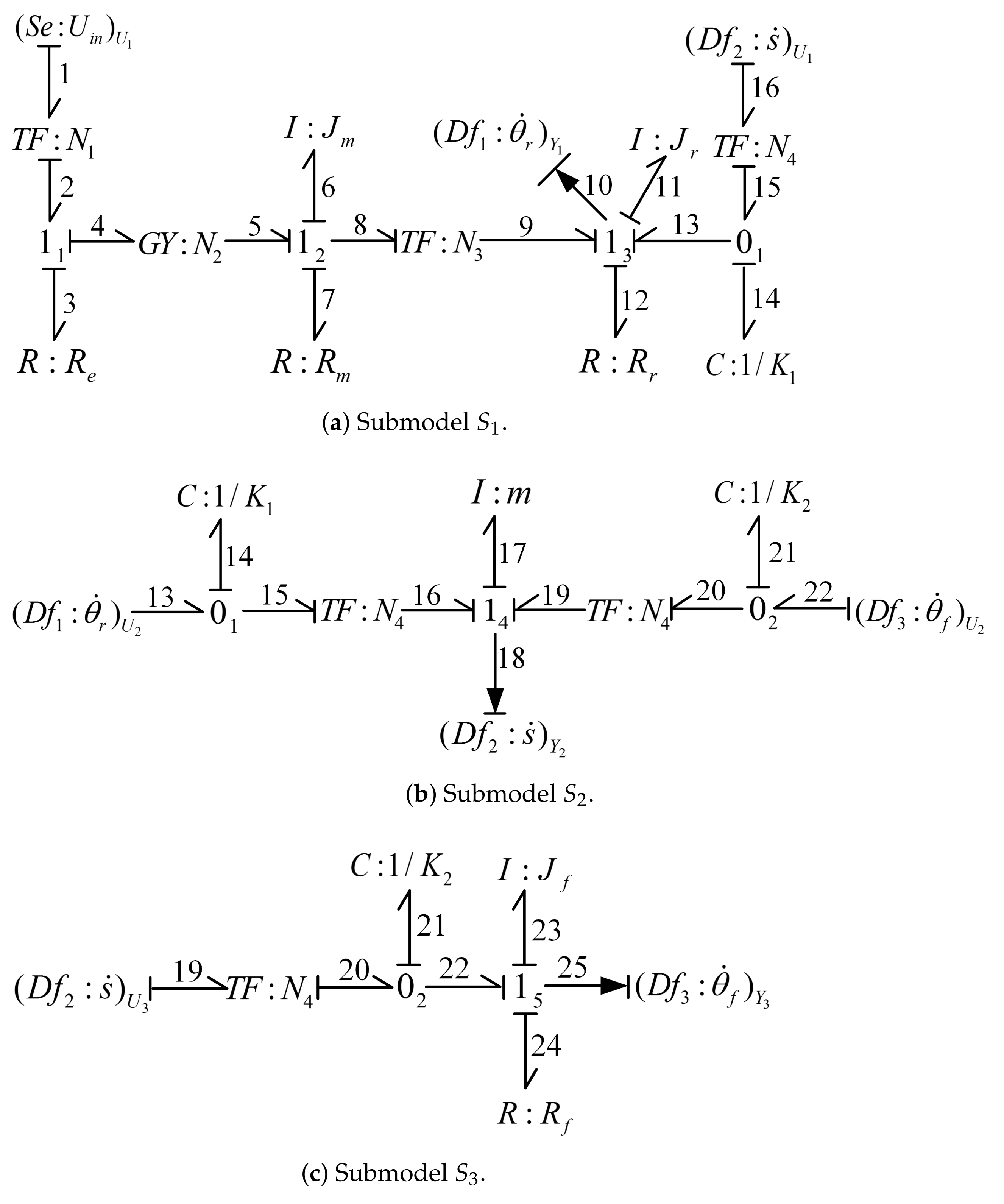
3.2. Construction of Submodels by Structural Model Decomposition
3.3. Distributed Fault Estimation via ACS Algorithm
4. ACS-ELM Based Prognosis under Intermittent Fault
4.1. ELM Theory
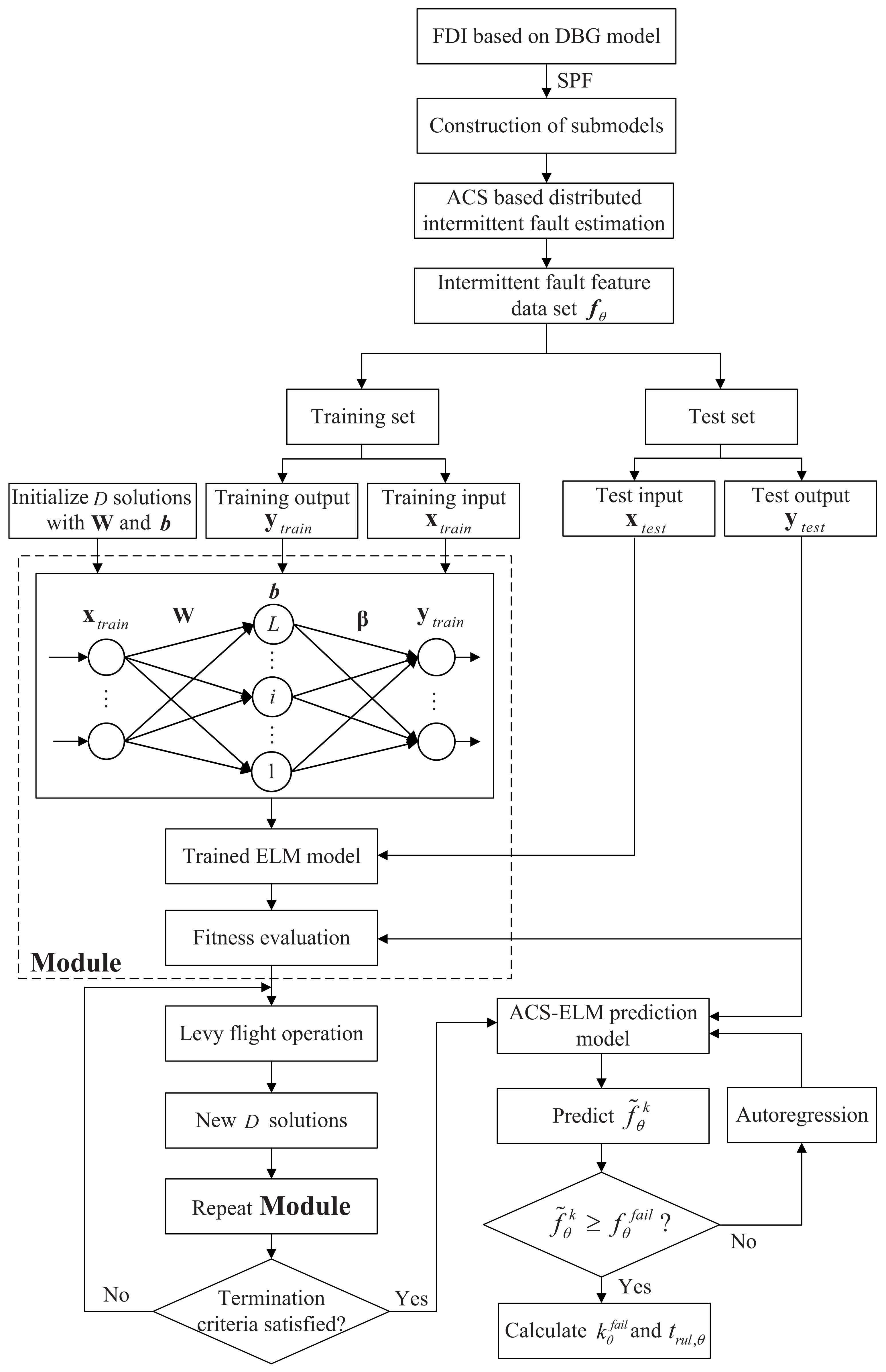
4.2. RUL Prediction for Intermittently Faulty Components Using ACS-ELM
5. Simulation and Experiment Results
5.1. Simulation Study
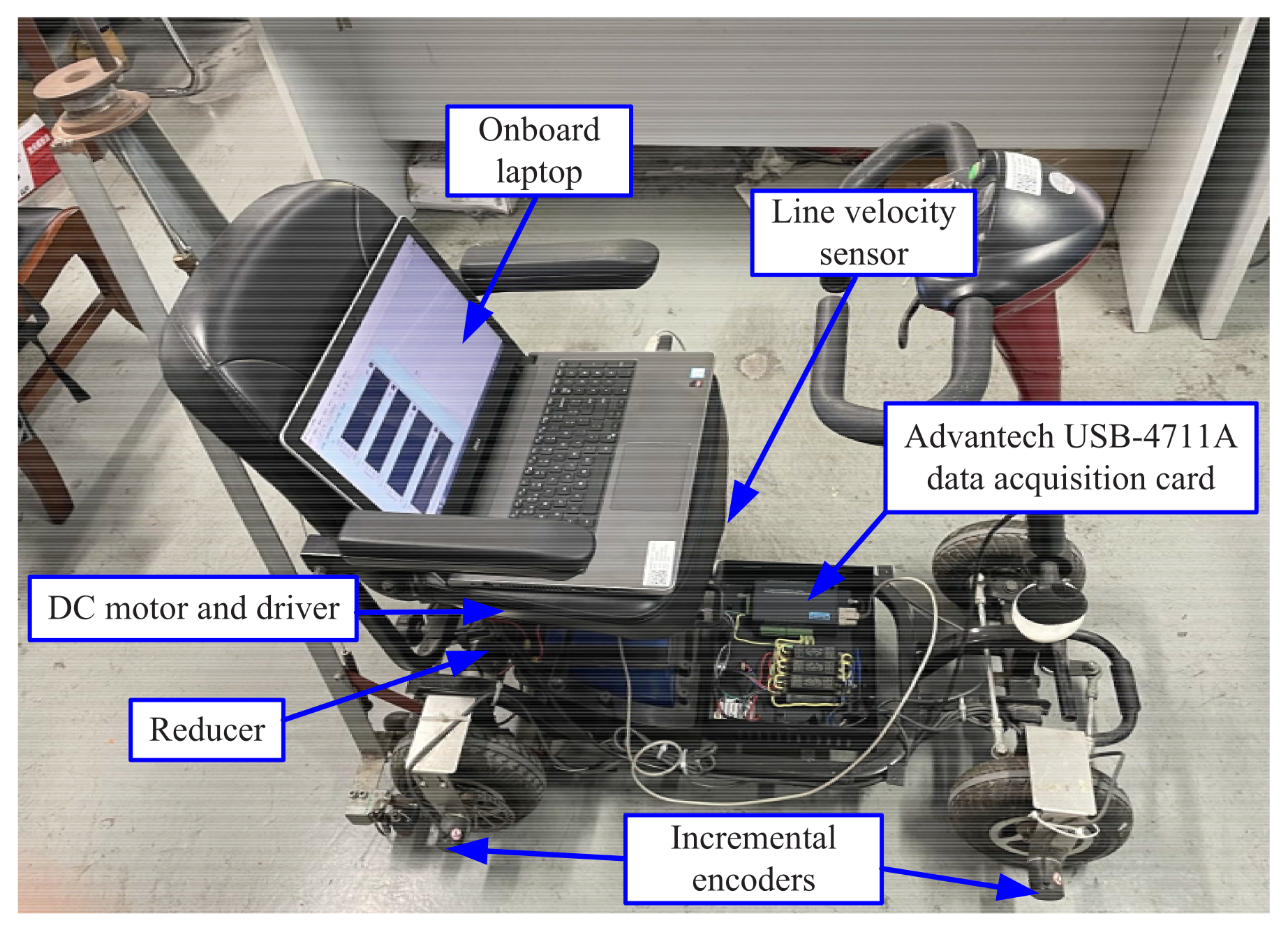
5.2. Experiment Study
5.3. Analysis and Comparison
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Stoll, J.T.; Schanz, K.; Pott, A. Mechatronic control system for a compliant and precise pneumatic rotary drive unit. Actuators 2020, 9, 1. [Google Scholar] [CrossRef] [Green Version]
- Zhang, J.; Wang, H.; Zheng, J.; Cao, Z.; Man, Z.; Yu, M.; Chen, L. Adaptive sliding mode-based lateral stability control of steer-by-wire vehicles with experimental validations. IEEE Trans. Veh. Technol. 2020, 69, 9589–9600. [Google Scholar] [CrossRef]
- Aguzzi, J.; Costa, C.; Calisti, M.; Funari, V.; Stefanni, S.; Danovaro, R.; Gomes, H.I.; Vecchi, F.; Dartnell, L.R.; Weiss, P.; et al. Research trends and future perspectives in marine biomimicking robotics. Sensors 2021, 21, 3778. [Google Scholar] [CrossRef] [PubMed]
- Shi, Y.; Shen, C.; Fang, H.; Li, H. Advanced control in marine mechatronic systems: A survey. IEEE/ASME Trans. Mechatron. 2017, 22, 1121–1131. [Google Scholar] [CrossRef]
- Zhang, J.; Wang, H.; Ma, M.; Yu, M.; Yazdani, A.; Chen, L. Active front steering-based electronic stability control for steer-by-wire vehicles via terminal sliding mode and extreme learning machine. IEEE Trans. Veh. Technol. 2020, 69, 14713–14726. [Google Scholar] [CrossRef]
- Cai, B.; Zhao, Y.; Liu, H.; Xie, M. A data-driven fault diagnosis methodology in three-phase inverters for PMSM drive systems. IEEE Trans. Power Electron. 2017, 32, 5590–5600. [Google Scholar] [CrossRef]
- Zhang, J.; Yao, H.; Rizzoni, G. Fault diagnosis for electric drive systems of electrified vehicles based on structural analysis. IEEE Trans. Veh. Technol. 2017, 66, 1027–1039. [Google Scholar] [CrossRef]
- Wang, X.; Wang, Z.; Xu, Z.; Cheng, M.; Wang, W.; Hu, Y. Comprehensive diagnosis and tolerance strategies for electrical faults and sensor faults in dual three-phase PMSM drives. IEEE Trans. Power Electron. 2019, 34, 6669–6684. [Google Scholar] [CrossRef]
- Sundstrom, C.; Frisk, E.; Nielsen, L. Selecting and utilizing sequential residual generators in FDI applied to hybrid vehicles. IEEE Trans. Syst. Man Cybern. Syst. 2014, 44, 172–185. [Google Scholar] [CrossRef] [Green Version]
- Yaramasu, M.; Cao, A.; Liu, G.; Wu, B. Aircraft electric system intermittent arc fault detection and location. IEEE Trans. Aerosp. Electron. Syst. 2015, 51, 45–51. [Google Scholar] [CrossRef]
- Yan, R.; He, X.; Wang, Z.; Zhou, D. Detection, isolation and diagnosability analysis of intermittent faults in stochastic systems. Int. J. Control 2018, 9, 480–494. [Google Scholar] [CrossRef]
- Obeid, N.H.; Battiston, A.; Boileau, T.; Nahid-Mobarakeh, B. Early intermittent interturn fault detection and localization for a permanent magnet synchronous motor of electrical vehicles using wavelet transform. IEEE Trans. Transport. Electrific. 2017, 3, 694–702. [Google Scholar] [CrossRef]
- Arogeti, S.A.; Wang, D.; Low, C.B.; Yu, M. Fault detection isolation and estimation in a vehicle steering system. IEEE Trans. Ind. Electron. 2012, 59, 4810–4820. [Google Scholar] [CrossRef]
- Bregon, A.; Daigle, M.J.; Roychoudhury, I.; Biswas, G.; Koutsoukos, X.; Pulido, B. An event-based distributed diagnosis framework using structural model decomposition. Artif. Intell. 2014, 210, 1–35. [Google Scholar] [CrossRef]
- Daigle, M.J.; Bregon, A.; Roychoudhury, I. Distributed prognostics based on structural model decomposition. IEEE Trans. Reliab. 2014, 63, 495–510. [Google Scholar] [CrossRef] [Green Version]
- Yu, M.; Lu, H.; Wang, H.; Xiao, C.; Lan, D.; Chen, J. Computational intelligence-based prognosis for hybrid mechatronic system using improved wiener process. Actuators 2021, 10, 213. [Google Scholar] [CrossRef]
- Nguyen, V.; Seshadrinath, J.; Wang, D.; Nadarajan, S.; Vaiyapuri, V. Model-based diagnosis and RUL estimation of induction machines under interturn fault. IEEE Trans. Ind. Appl. 2017, 53, 2690–2701. [Google Scholar] [CrossRef]
- Yu, M.; Wang, D. Model-based health monitoring for a vehicle steering system with multiple faults of unknown types. IEEE Trans. Ind. Electron. 2014, 61, 3574–3586. [Google Scholar]
- Yu, M.; Xia, H.; He, Y.; Wang, H.; Jiang, C.; Chen, S.; Li, M.; Xu, J. Scheduled health monitoring of hybrid systems with multiple distinct faults. IEEE Trans. Ind. Electron. 2017, 64, 1517–1528. [Google Scholar] [CrossRef]
- Lei, Y.; Li, N.; Gontarz, S.; Lin, J.; Radkowski, S.; Dybala, J. A model-based method for remaining useful life prediction of machinery. IEEE Trans. Reliab. 2016, 5, 1314–1326. [Google Scholar] [CrossRef]
- Liu, R.; Yang, B.; Hauptmann, A.G. Simultaneous bearing fault recognition and remaining useful life prediction using joint-loss convolutional neural network. IEEE Trans. Ind. Inform. 2020, 16, 87–96. [Google Scholar] [CrossRef]
- Xiao, L.; Duan, F.; Tang, J.; Abbott, D. A noise-boosted remaining useful life prediction method for rotating machines under different conditions. IEEE Trans. Instrum. Meas. 2021, 70, 1–12. [Google Scholar]
- Huang, G.; Zhu, Q.; Siew, C. Extreme learning machine: Theory and applications. Neurocomputing 2006, 70, 489–501. [Google Scholar] [CrossRef]
- Song, J.; Dong, F.; Zhao, J.; Wang, H.; He, Z.; Wang, L. An efficient multiobjective design optimization method for a PMSLM based on an extreme learning machine. IEEE Trans. Ind. Electron. 2019, 66, 1001–1011. [Google Scholar] [CrossRef]
- Skordilis, E.; Moghaddass, R. A double hybrid state-space model for real-time sensor-driven monitoring of deteriorating systems. IEEE Trans. Autom. Sci. Eng. 2020, 17, 72–87. [Google Scholar] [CrossRef]
- Lu, F.; Wu, J.; Huang, J.; Qiu, X. Aircraft engine degradation prognostics based on logistic regression and novel OS-ELM algorithm. Aerosp. Sci. Technol. 2019, 84, 661–671. [Google Scholar] [CrossRef]
- Zeng, N.; Zhang, H.; Liu, W.; Liang, J.; Alsaadi, F.E. A switching delayed PSO optimized extreme learning machine for short-term load forecasting. Neurocomputing 2017, 240, 175–182. [Google Scholar] [CrossRef]
- Yu, M.; Lu, H.; Wang, H.; Xiao, C.; Lan, D. Compound fault diagnosis and sequential prognosis for electric scooter with uncertainties. Actuators 2020, 9, 128. [Google Scholar] [CrossRef]
- Gandomi, A.H.; Yang, X.; Alavi, A.H. Cuckoo search algorithm: A metaheuristic approach to solve structural optimization problems. Eng. Comput. 2013, 29, 17–35. [Google Scholar] [CrossRef]
- Wang, Q.; Chai, M.; Liu, H.; Tang, T. Optimized control of virtual coupling at junctions: A cooperative game-based approach. Actuators 2021, 10, 207. [Google Scholar] [CrossRef]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Description |
|---|---|
| Input signal | |
| Voltage-to-current ratio | |
| Current-to-torque constant | |
| Reduction ratio | |
| Wheel radius | |
| , | Transmission axes rigidity |
| m | Scooter mass |
| Electrical resistance | |
| Motor viscous friction coefficient | |
| Motor Coulomb friction torque | |
| Motor inertia | |
| Rear wheel viscous friction coefficient | |
| Rear wheel Coulomb friction torque | |
| Rear wheel inertia | |
| Front wheel viscous friction coefficient | |
| Front wheel Coulomb friction torque | |
| Front wheel inertia |
| 1 | 0 | 0 | 1 | 0 | |
| 1 | 0 | 0 | 1 | 0 | |
| 1 | 1 | 0 | 1 | 0 | |
| 1 | 1 | 1 | 1 | 0 | |
| 0 | 1 | 1 | 1 | 0 | |
| 0 | 0 | 1 | 1 | 0 | |
| 0 | 0 | 1 | 1 | 0 |
| Nominal Parameter Values | |||
|---|---|---|---|
| 0.2 A/V | 1 Nm/A | ||
| 1/0.105 m | 1/18 | ||
| 10 Nm/rad | 10 Nm/rad | ||
| Nms/rad | Nm | ||
| Nms/rad | Nm | ||
| Nms/rad | Nm | ||
| kgm | kgm | ||
| kgm | 1 | ||
| m | 20.7 kg | ||
| (a) | ||||||
| TW | TW | |||||
| (s) | (s) | (s) | (s) | |||
| Designed value | 100 | 101 | 0.97 | 115 | 117 | 0.95 |
| Estimated value | 100.0032 | 101.0023 | 0.9705 | 114.9978 | 117.0019 | 0.9509 |
| (b) | ||||||
| TW | TW | |||||
| (Nm) | (s) | (s) | (s) | (s) | ||
| Designed value | 100 | 102 | 1.8 | 113 | 115 | 2.9 |
| Estimated value | 100.0024 | 102.1015 | 1.806 | 113.0012 | 114.9985 | 2.911 |
| MAE | RMSE | MAPE(%) | |
|---|---|---|---|
| 0.0071 | 0.0076 | 1.8773 | |
| 0.0022 | 0.0031 | 0.3630 | |
| 0.0074 | 0.0084 | 2.6825 |
| Algorithm | (%) | |||
|---|---|---|---|---|
| ELM | 0.0324 | 0.0373 | 8.1226 | |
| PSO-ELM | 0.0086 | 0.0109 | 2.9753 | |
| ACS-ELM | 0.0052 | 0.0069 | 1.3394 | |
| ELM | 0.0255 | 0.0312 | 6.7490 | |
| PSO-ELM | 0.0048 | 0.0065 | 1.2562 | |
| ACS-ELM | 0.0034 | 0.0038 | 0.7221 | |
| ELM | 0.0387 | 0.0475 | 8.9917 | |
| PSO-ELM | 0.0092 | 0.0107 | 3.0169 | |
| ACS-ELM | 0.0057 | 0.0072 | 1.6385 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yu, M.; Xiao, C.; Wang, H.; Jiang, W.; Zhu, R. Adaptive Cuckoo Search-Extreme Learning Machine Based Prognosis for Electric Scooter System under Intermittent Fault. Actuators 2021, 10, 283. https://doi.org/10.3390/act10110283
Yu M, Xiao C, Wang H, Jiang W, Zhu R. Adaptive Cuckoo Search-Extreme Learning Machine Based Prognosis for Electric Scooter System under Intermittent Fault. Actuators. 2021; 10(11):283. https://doi.org/10.3390/act10110283
Chicago/Turabian StyleYu, Ming, Chenyu Xiao, Hai Wang, Wuhua Jiang, and Rensheng Zhu. 2021. "Adaptive Cuckoo Search-Extreme Learning Machine Based Prognosis for Electric Scooter System under Intermittent Fault" Actuators 10, no. 11: 283. https://doi.org/10.3390/act10110283
APA StyleYu, M., Xiao, C., Wang, H., Jiang, W., & Zhu, R. (2021). Adaptive Cuckoo Search-Extreme Learning Machine Based Prognosis for Electric Scooter System under Intermittent Fault. Actuators, 10(11), 283. https://doi.org/10.3390/act10110283