
Active Vibration-Based Condition Monitoring of a Transmission Line


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Operating Principle and Monitoring System
2.1. Operating Principle
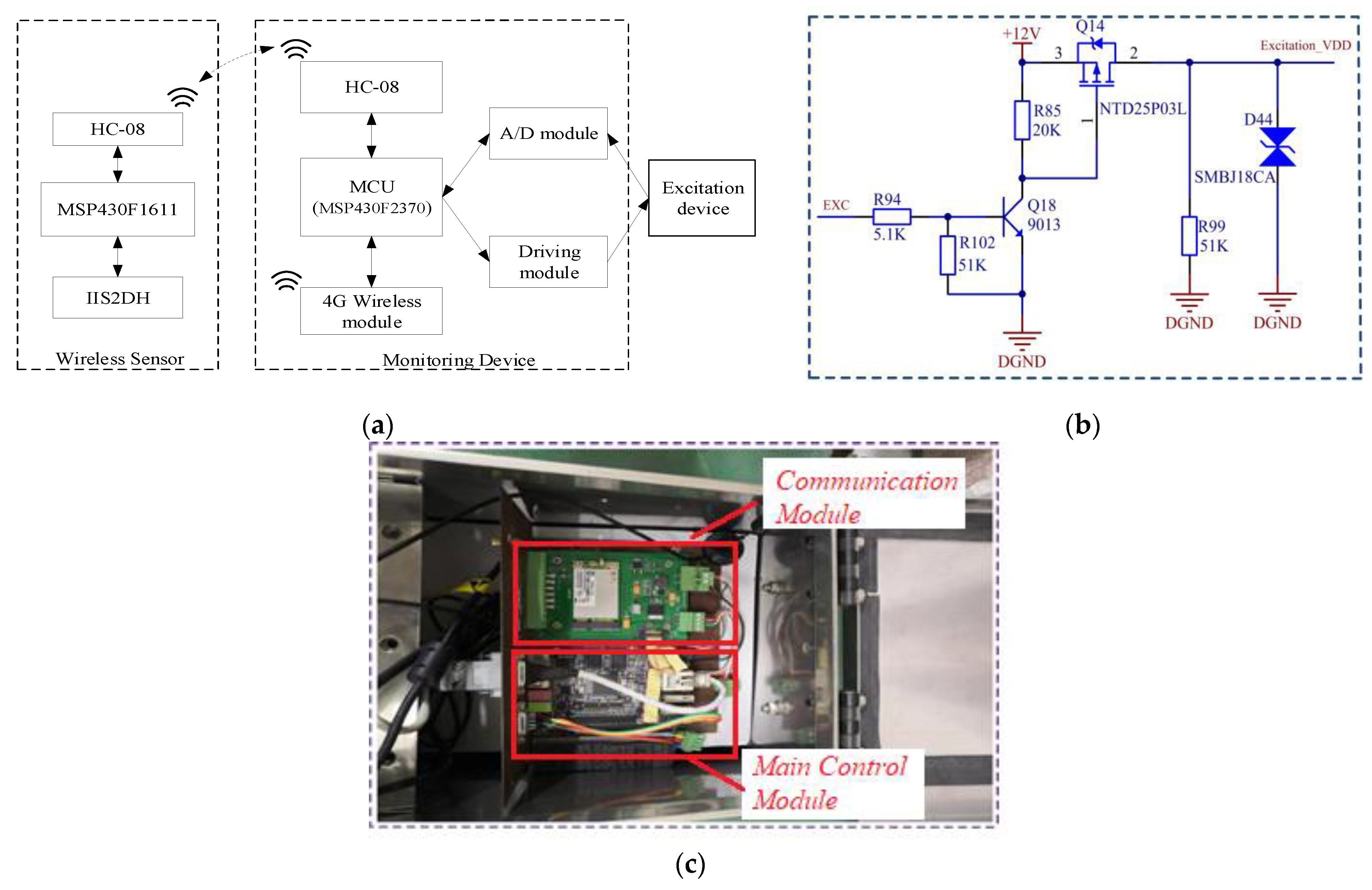
2.2. Monitoring Device
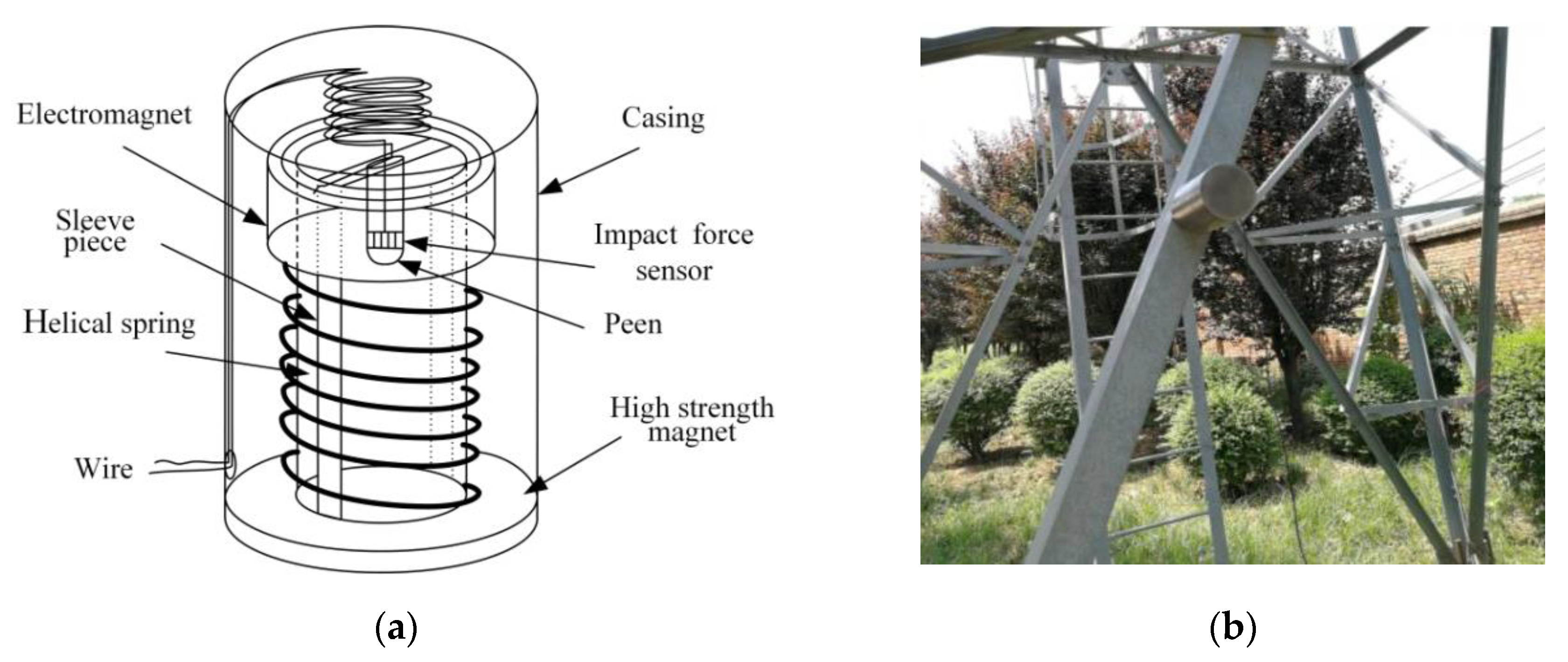
2.3. Force-Generating Device
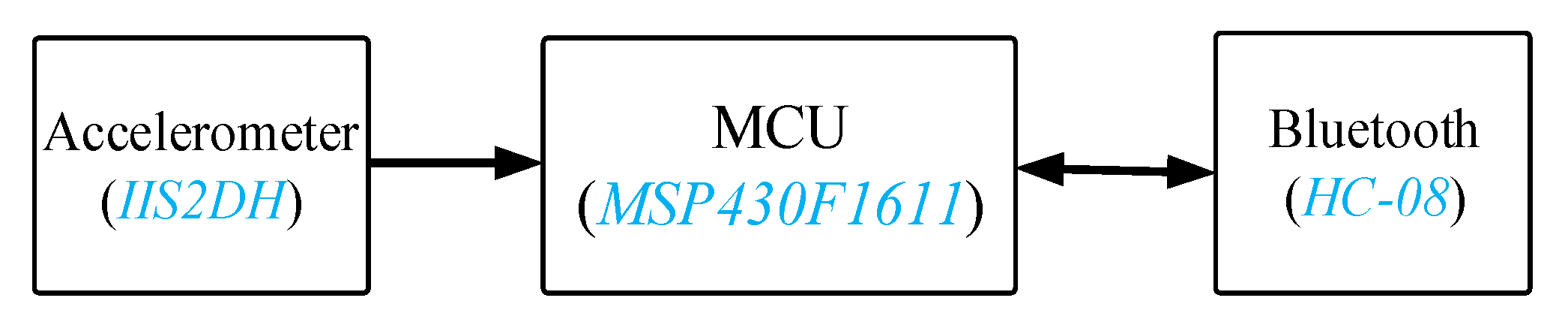
2.4. Wireless Acceleration Sensor
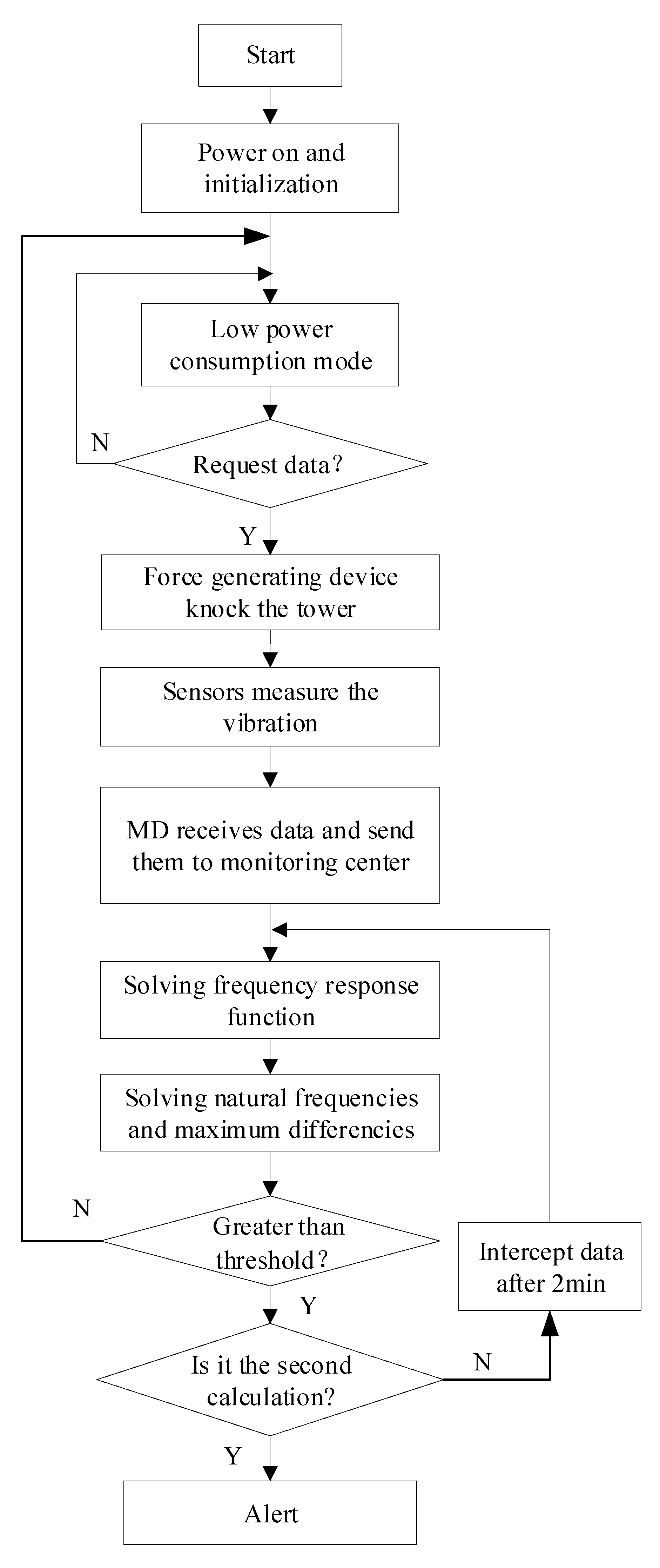
2.5. Workflow of the Monitoring System
3. Experiment and Analysis
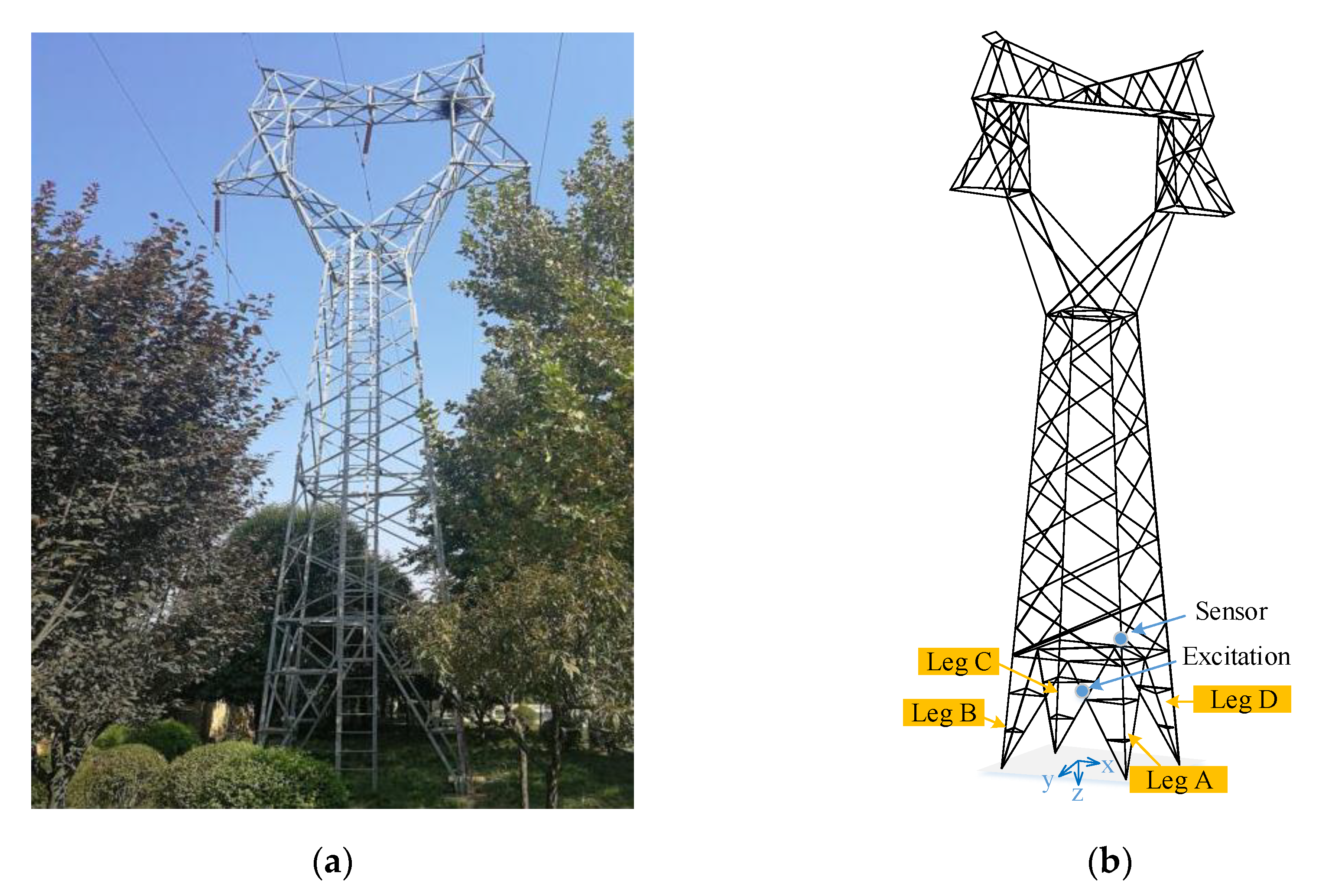
3.1. Experimental Platform
3.2. Selection of the Sampling Frequency
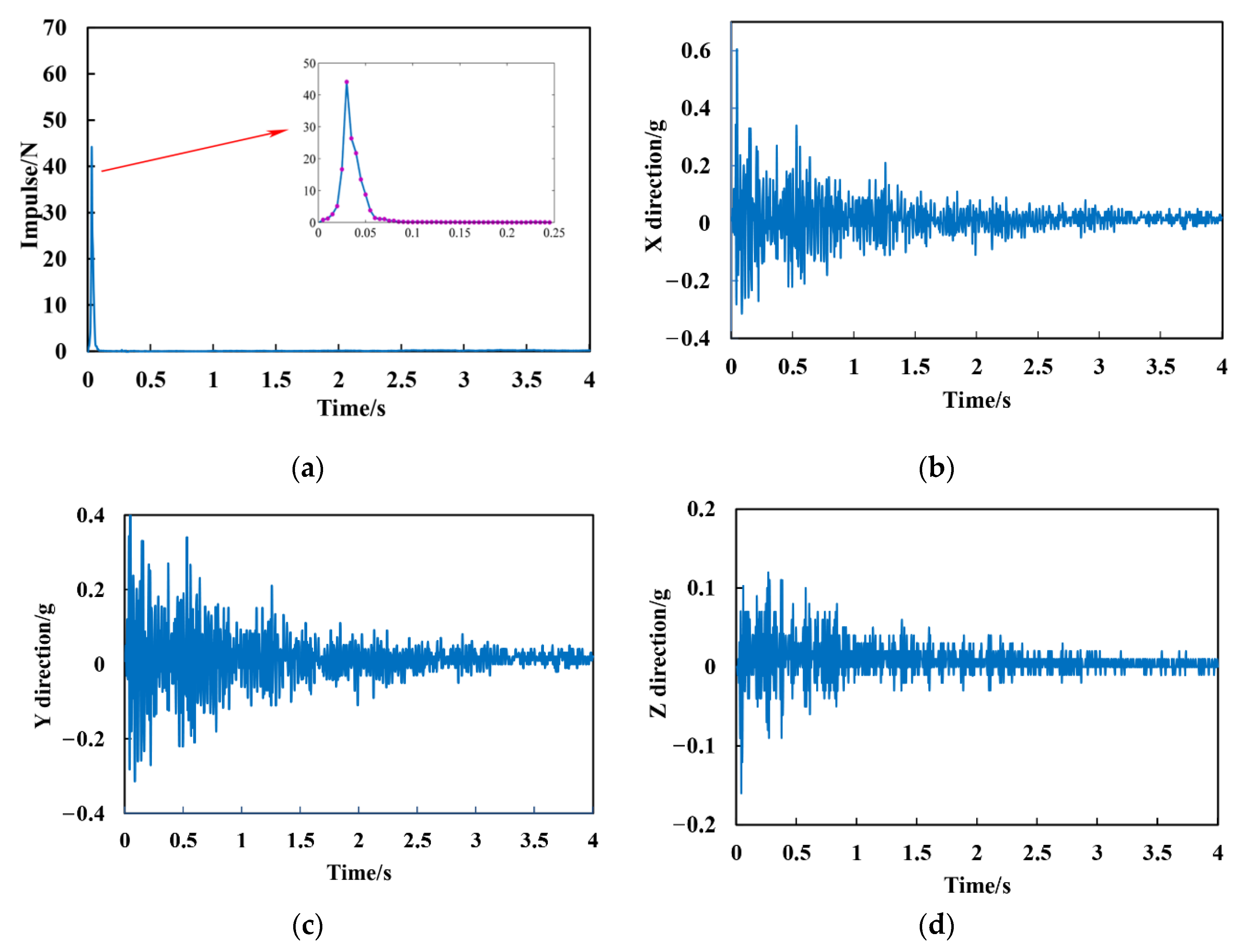
3.3. Implementation
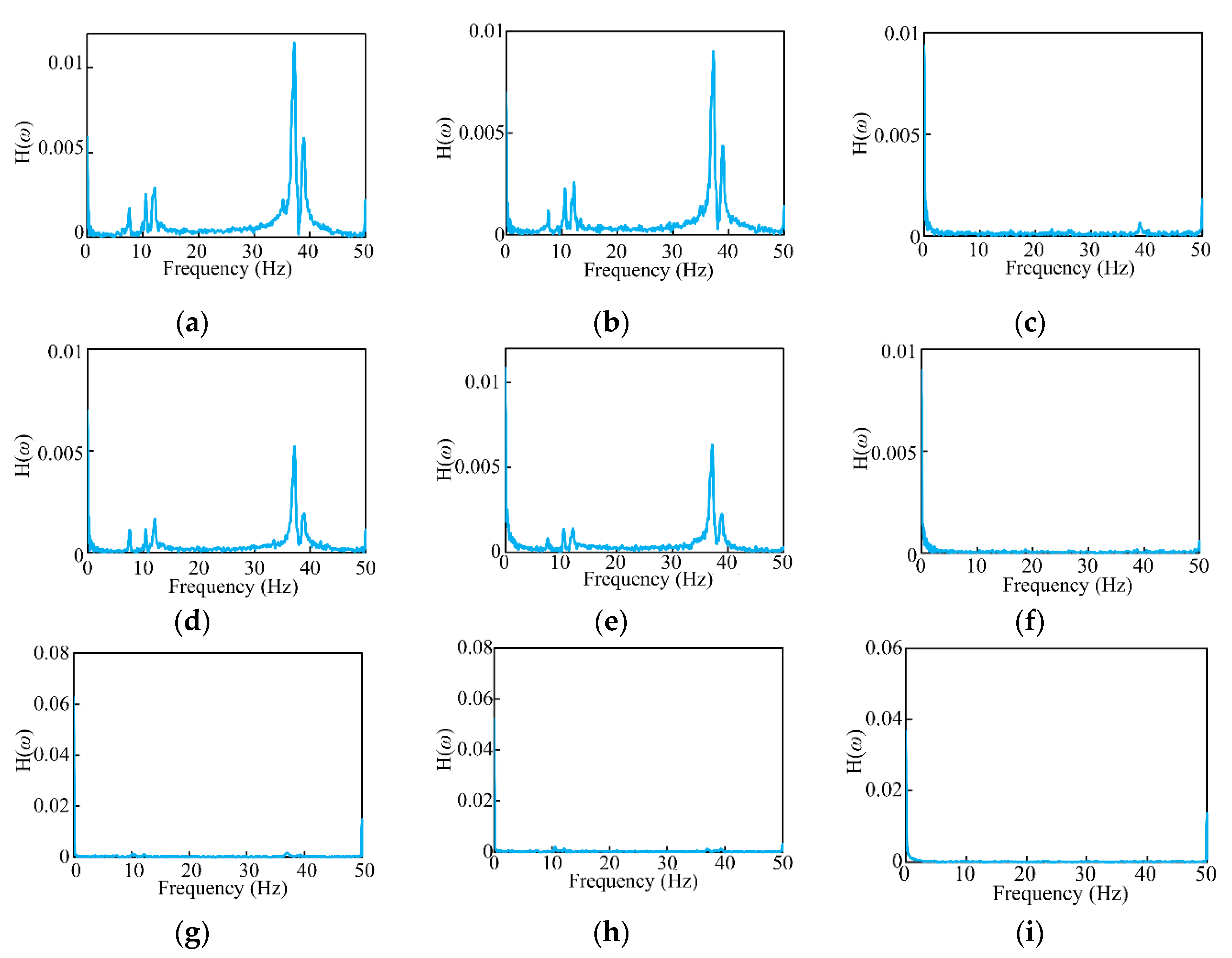
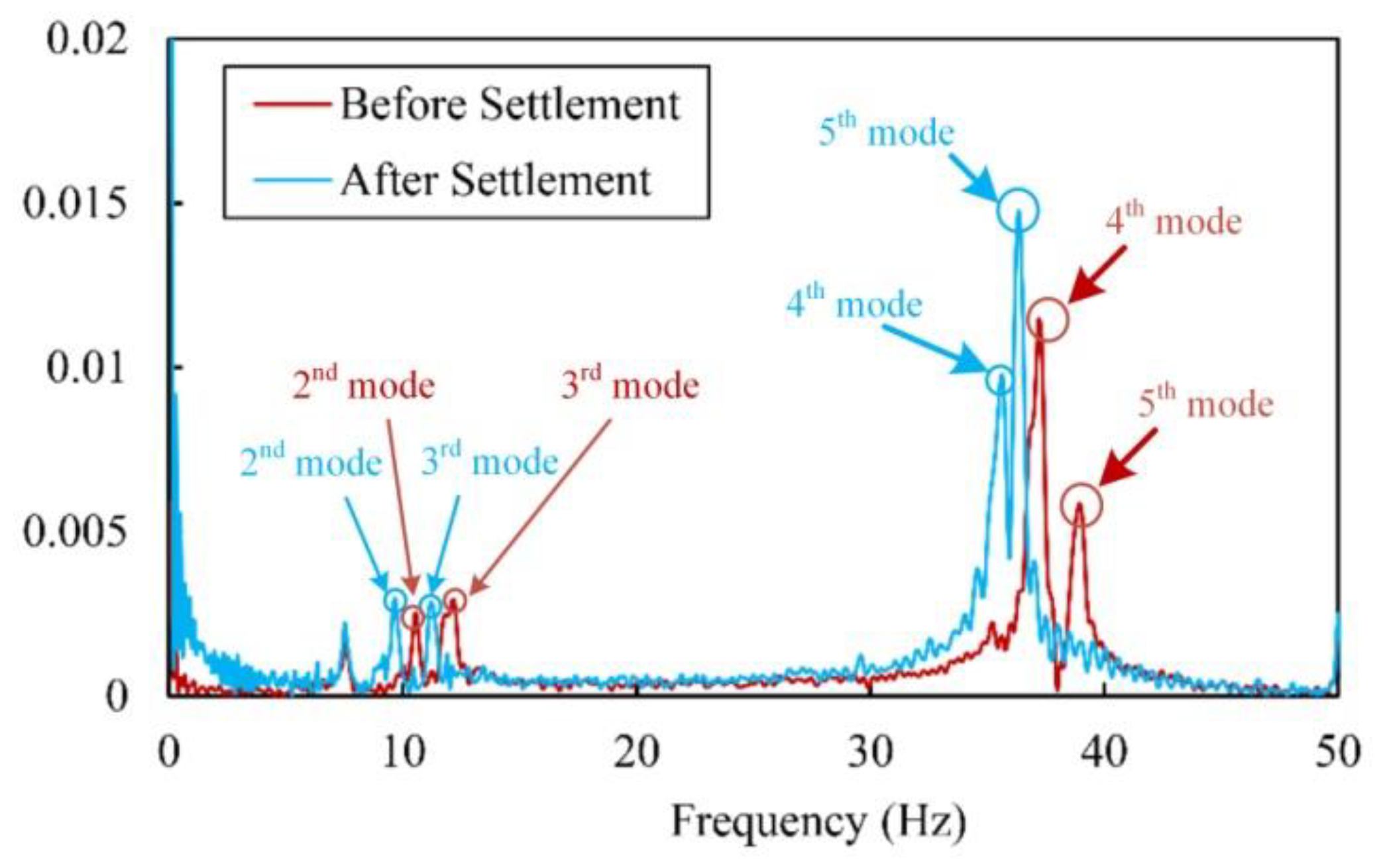
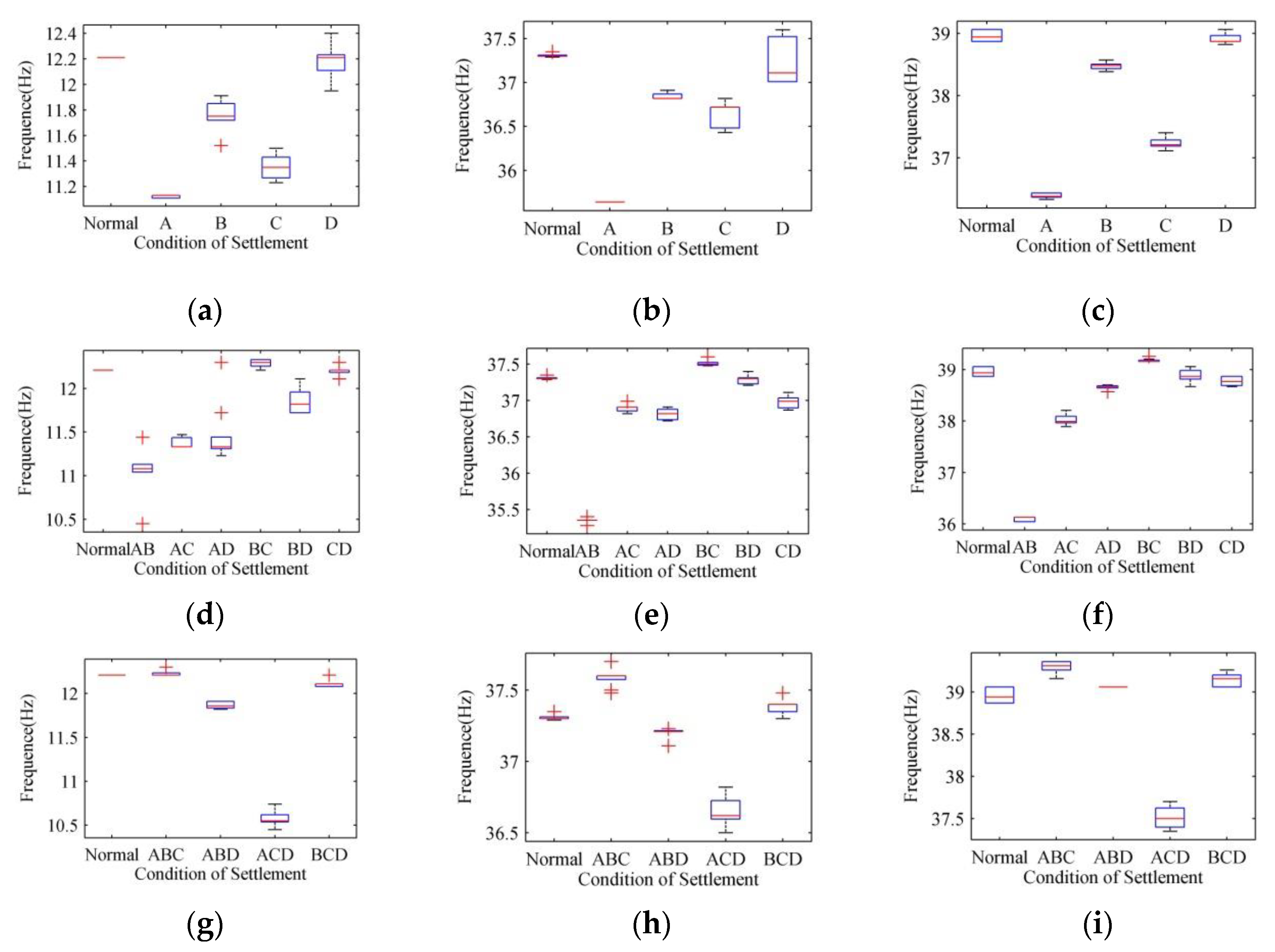
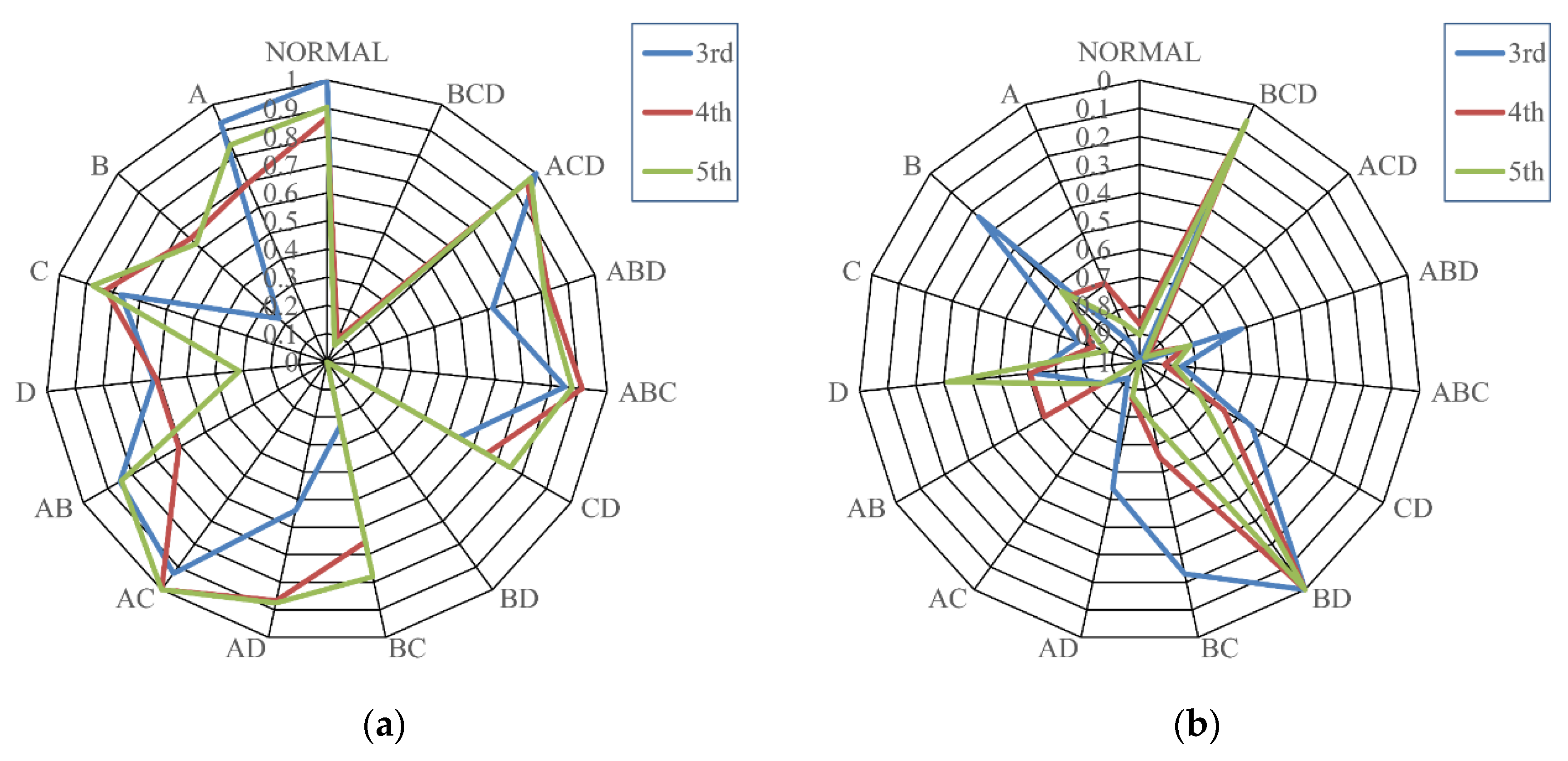
3.4. Identification of the Natural Frequencies
3.5. Tower Leg Displacement Experiment
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Huang, X.; Zhao, L.; Chen, Z.; Liu, C. An online monitoring technology of tower foundation deformation of transmission lines. Struct. Health Monit. 2019, 18, 949–962. [Google Scholar] [CrossRef]
- Huang, X.; Chen, Z.; Zhao, L.; Zhu, Y.; Xu, G.; Si, W. Stress simulation and experiment for tower foundation settlement of 110 kV transmission line. Electr. Power Autom. Equip. 2017, 37, 361–370. [Google Scholar]
- Rao, N.P.; Knight, G.S.; Mohan, S.; Lakshmanan, N. Studies on failure of transmission line towers in testing. Eng. Struct. 2012, 35, 55–70. [Google Scholar] [CrossRef]
- Albermani, F.; Kitipornchai, S.; Chan, R. Failure analysis of transmission towers. Eng. Fail. Anal. 2009, 16, 1922–1928. [Google Scholar] [CrossRef]
- An, L.; Jiang, W.; Liu, Y.; Shi, Q.; Wang, Y.; Liu, S. Experimental study of mechanical behavior of angles in transmission towers under freezing temperature. Adv. Steel Construct. 2018, 14, 461–478. [Google Scholar]
- Malhara, S.; Vittal, V. Mechanical State Estimation of Overhead Transmission Lines Using Tilt Sensors. IEEE Trans. Power Syst. 2010, 25, 1282–1290. [Google Scholar] [CrossRef]
- Reagan, D.; Sabato, A.; Niezrecki, C. Feasibility of using digital image correlation for unmanned aerial vehicle structural health monitoring of bridges. Struct. Health Monit. 2018, 17, 1056–1072. [Google Scholar] [CrossRef]
- Huang, X.; Yang, L.; Zhang, Y.; Zhu, Y.; Zhang, G. A Measurement Technology of Space Distance Among Transmission Bundle Conductors Based on Image Sensors. IEEE Trans. Instrum. Meas. 2018, 68, 4003–4014. [Google Scholar] [CrossRef]
- Zhong, M.; Cao, Q.; Guo, J.; Zhou, D. Simultaneous Lever-Arm Compensation and Disturbance Attenuation of POS for a UAV Surveying System. IEEE Trans. Instrum. Meas. 2016, 65, 2828–2839. [Google Scholar] [CrossRef]
- Bian, J.; Hui, X.; Zhao, X.; Tan, M. A monocular vision–based perception approach for unmanned aerial vehicle close proximity transmission tower inspection. Int. J. Adv. Robot. Syst. 2019, 16, 1729881418820227. [Google Scholar] [CrossRef]
- Xiao, Z.; Liang, J.; Yu, D.; Asundi, A. Large field-of-view deformation measurement for transmission tower based on close-range photogrammetry. Measurement 2011, 44, 1705–1712. [Google Scholar] [CrossRef]
- Zeng, T.; Gao, Q.; Ding, Z.; Tian, W.; Yang, Y.; Zhang, Z. Power Transmission Tower Detection Based on Polar Coordinate Semivariogram in High-Resolution SAR Image. IEEE Geosci. Remote. Sens. Lett. 2017, 14, 2200–2204. [Google Scholar] [CrossRef]
- Xia, Y.; Zhang, P.; Ni, Y.-Q.; Zhu, H.-P. Deformation monitoring of a super-tall structure using real-time strain data. Eng. Struct. 2014, 67, 29–38. [Google Scholar] [CrossRef] [Green Version]
- Bang, H.-J.; Kim, H.-I.; Lee, K.-S. Measurement of strain and bending deflection of a wind turbine tower using arrayed FBG sensors. Int. J. Precis. Eng. Manuf. 2012, 13, 2121–2126. [Google Scholar] [CrossRef]
- Rainieri, C.; Magalhães, F.; Gargaro, D.; Fabbrocino, G.; Cunha, Á. Predicting the variability of natural frequencies and its causes by Second-Order Blind Identification. Struct. Health Monit. 2019, 18, 486–507. [Google Scholar] [CrossRef]
- Di Lorenzo, E.; Petrone, G.; Manzato, S.; Peeters, B.; Desmet, W.; Marulo, F. Damage detection in wind turbine blades by using operational modal analysis. Struct. Health Monit. 2016, 15, 289–301. [Google Scholar] [CrossRef]
- Zhao, L.; Huang, X.; Jia, J.; Zhu, Y.; Cao, W. Detection of Broken Strands of Transmission Line Conductors Using Fiber Bragg Grating Sensors. Sensors 2018, 18, 2397. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Zhang, M.; Zhao, G.F.; Wang, L.L.; Li, J. Wind-Induced Coupling Vibration Effects of High-Voltage Transmission Tow-er-Line Systems. Shock Vib. 2017, 2017, 1205976. [Google Scholar]
- Qiu, B.; Lu, Y.; Sun, L.; Qu, X.; Xue, Y.; Tong, F. Research on the damage prediction method of offshore wind turbine tower structure based on improved neural network. Measurement 2020, 151, 107141. [Google Scholar] [CrossRef]
- Fei, Q.; Zhou, H.; Han, X.; Wang, J. Structural health monitoring oriented stability and dynamic analysis of a long-span transmission tower-line system. Eng. Fail. Anal. 2012, 20, 80–87. [Google Scholar] [CrossRef]
- Okamura, T.; Ohkuma, T.; Hongo, E.; Okada, H. Wind response analysis of a transmission tower in a mountainous area. J. Wind. Eng. Ind. Aerodyn. 2003, 91, 53–63. [Google Scholar] [CrossRef]
- Lynch, J.P.; Loh, K.J. A summary review of wireless sensors and sensor networks for structural health monitoring. Shock Vib. Dig. 2006, 38, 91–130. [Google Scholar] [CrossRef] [Green Version]
- Sabato, A.; Niezrecki, C.; Fortino, G. Wireless MEMS-Based Accelerometer Sensor Boards for Structural Vibration Moni-toring: A Review. IEEE Sens. J. 2017, 17, 226–235. [Google Scholar] [CrossRef]
- Huang, X.; Zhao, Y.; Zhao, L.; Yang, L. A Method for Settlement Detection of the Transmission Line Tower under Wind Force. Sensors 2018, 18, 4355. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Wang, J.; Wang, Z.; Feng, Y. Measurement and Analysis of Structure Vibration of In-service High Voltage Transmission Tower. J. North China Electr. Power Univ. 2016, 43, 62–65. [Google Scholar]
- Nan, Y.; Xie, W.; Min, L.; Cai, S.; Ni, J.; Yi, J.; Luo, X.; Wang, K.; Nie, M.; Wang, C.; et al. Real-Time Monitoring of Wind-Induced Vibration of High-Voltage Transmission Tower Using an Optical Fiber Sensing System. IEEE Trans. Instrum. Meas. 2020, 69, 268–274. [Google Scholar] [CrossRef]
- Anindya, G.; Mannur, J.S.; Mark, J.S.; Frank, P.P. Structural health monitoring techniques for wind turbine blades. J. Wind Eng. Ind. Aerodyn. 2000, 85, 309–324. [Google Scholar]
- Zhang, H.; Schulz, M.; Naser, A.; Ferguson, F.; Pai, P. Structural Health Monitoring Using Transmittance Functions. Mech. Syst. Signal Process. 1999, 13, 765–787. [Google Scholar] [CrossRef]
- Xiao-feng, H. On the setting of impulse-respouse method. J. Changde Teach. Univ. 2003, 2, 15. [Google Scholar]











Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, L.; Liu, C.; Zhu, X.; Xu, Z.; Zhu, W.; Zhao, L. Active Vibration-Based Condition Monitoring of a Transmission Line. Actuators 2021, 10, 309. https://doi.org/10.3390/act10120309
Wang L, Liu C, Zhu X, Xu Z, Zhu W, Zhao L. Active Vibration-Based Condition Monitoring of a Transmission Line. Actuators. 2021; 10(12):309. https://doi.org/10.3390/act10120309
Chicago/Turabian StyleWang, Liuhuo, Chengfeng Liu, Xiaowei Zhu, Zhixian Xu, Wenwei Zhu, and Long Zhao. 2021. "Active Vibration-Based Condition Monitoring of a Transmission Line" Actuators 10, no. 12: 309. https://doi.org/10.3390/act10120309
APA StyleWang, L., Liu, C., Zhu, X., Xu, Z., Zhu, W., & Zhao, L. (2021). Active Vibration-Based Condition Monitoring of a Transmission Line. Actuators, 10(12), 309. https://doi.org/10.3390/act10120309