
Multiparameter Optimization Framework of Cyberphysical Systems: A Case Study on Energy Saving of the Automotive Engine


Abstract
:1. Introduction
2. Related Works
3. Methodology
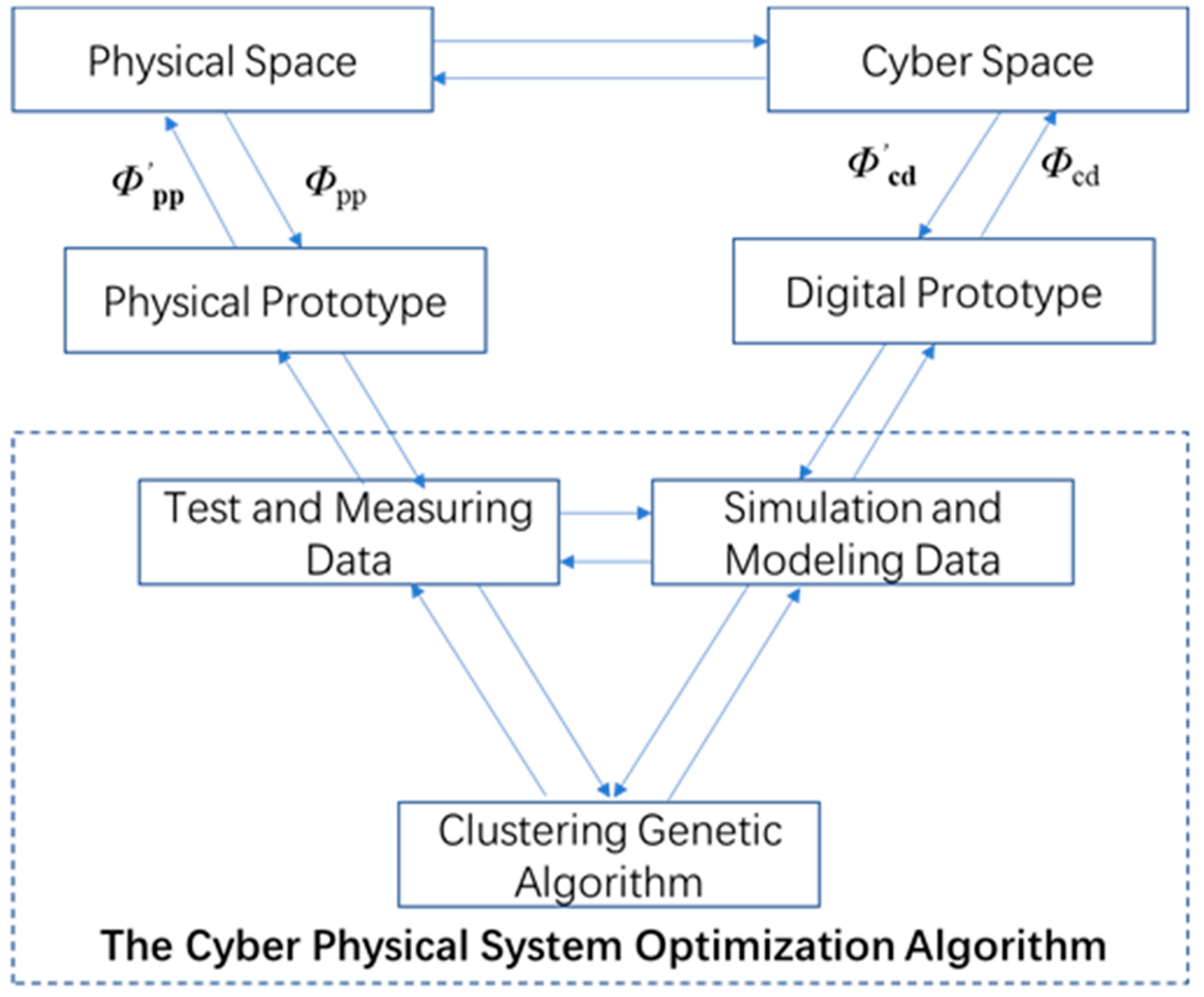
3.1. Framework
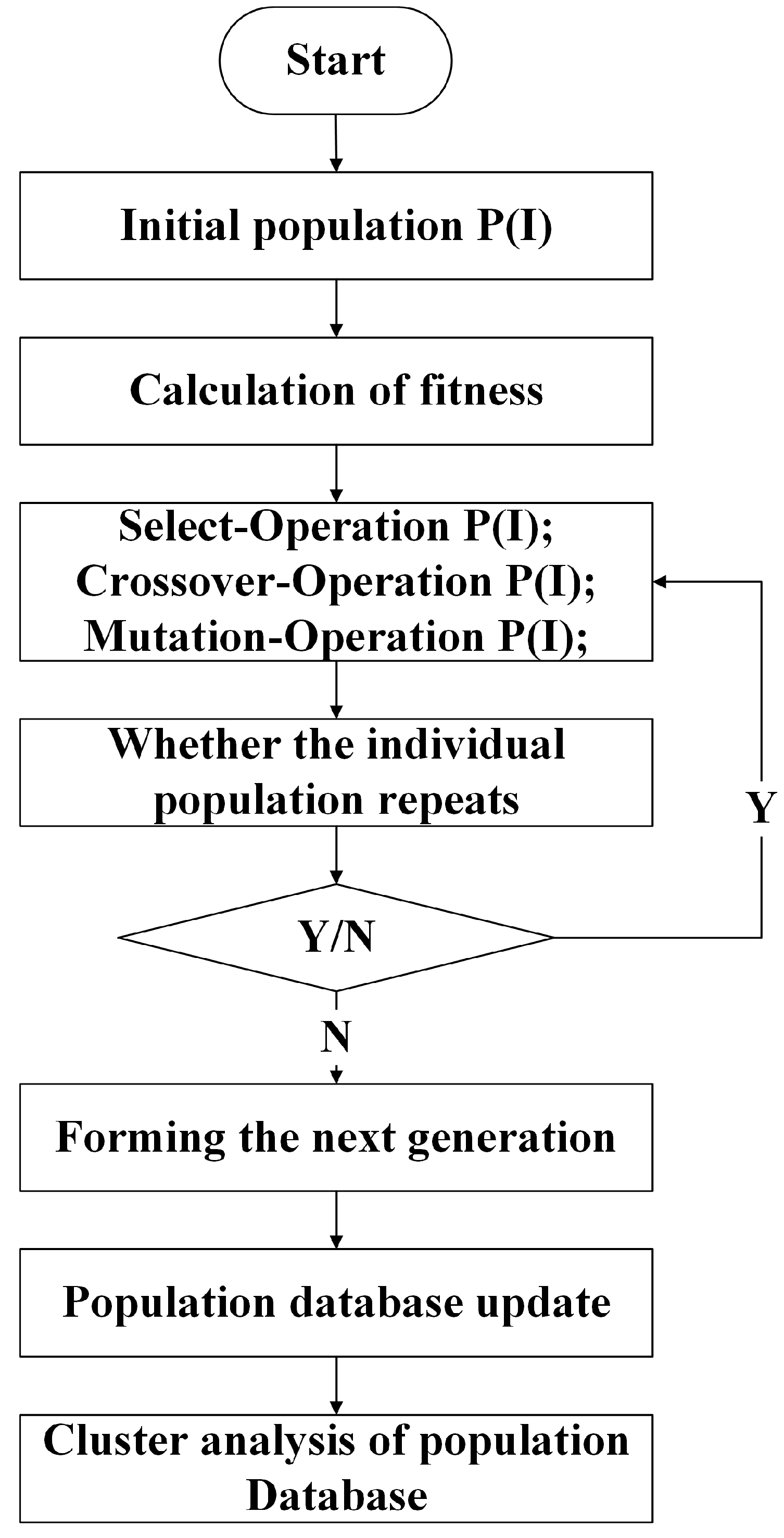
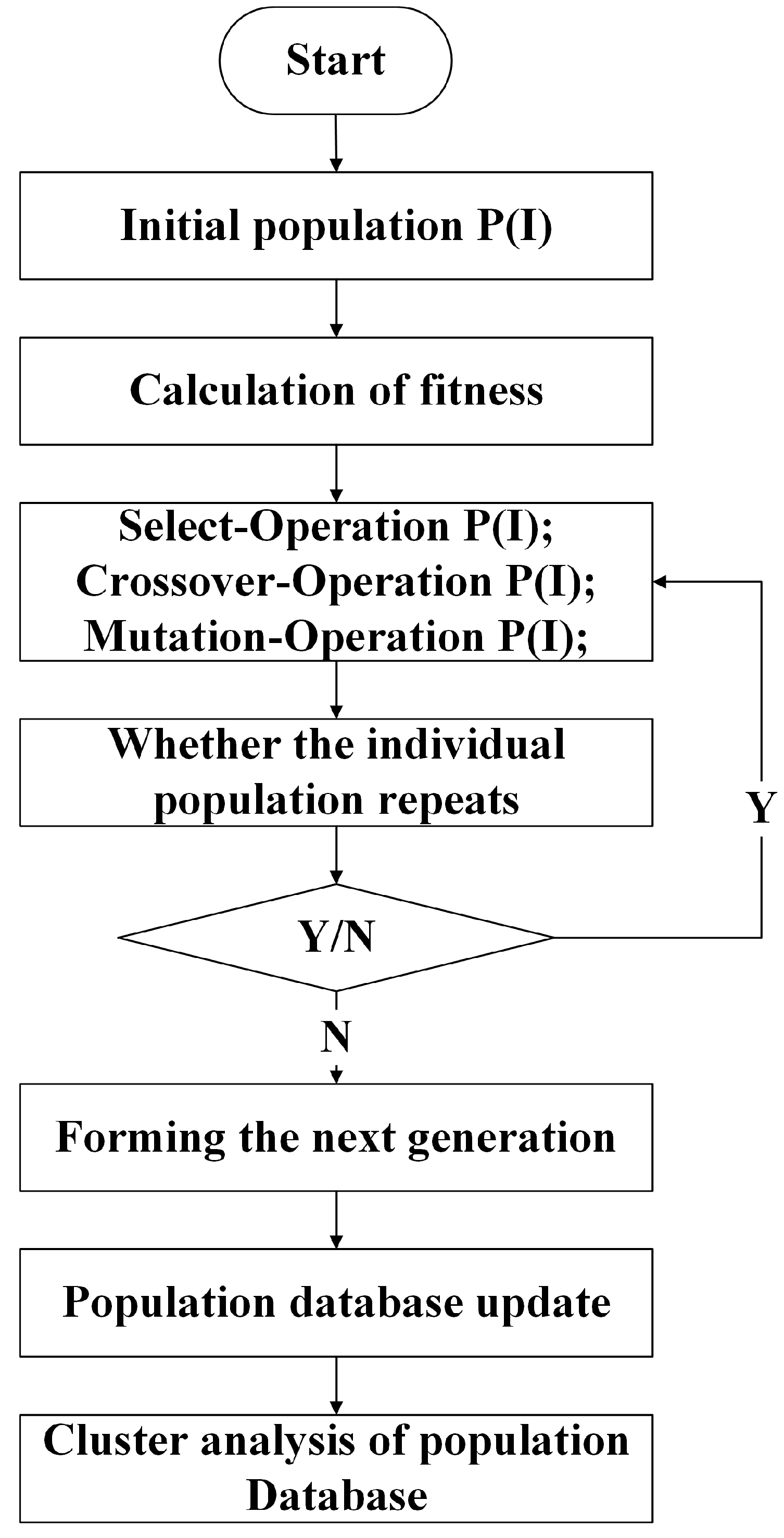
3.2. Optimization Algorithm
- (1)
- Traditional genetic algorithm requires a strict fitness function to limit the population range. The precise data label is required to classify the data. CGA has no limitation of strict population range definition.
- (2)
- Traditional genetic algorithm is an optimization method that only focuses on the final results but lacks the analysis and statistics of data changes in the iterative process. CGA facilitates the independent optimization analysis of the population and explores the iterative rule.
- (3)
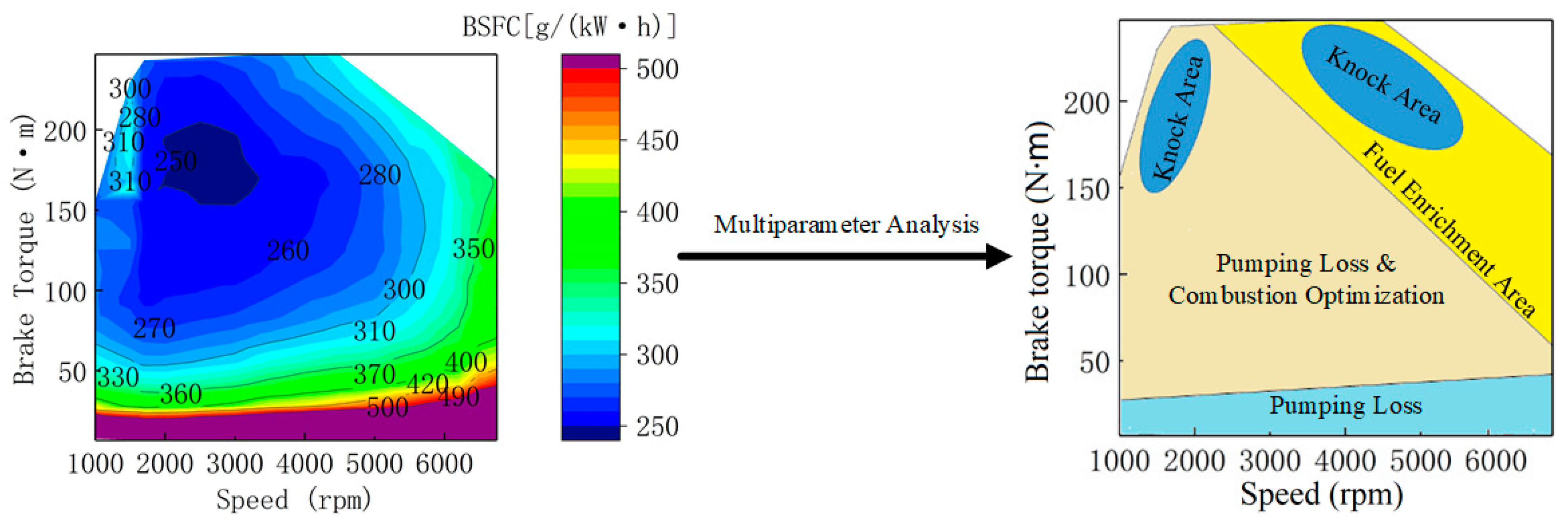
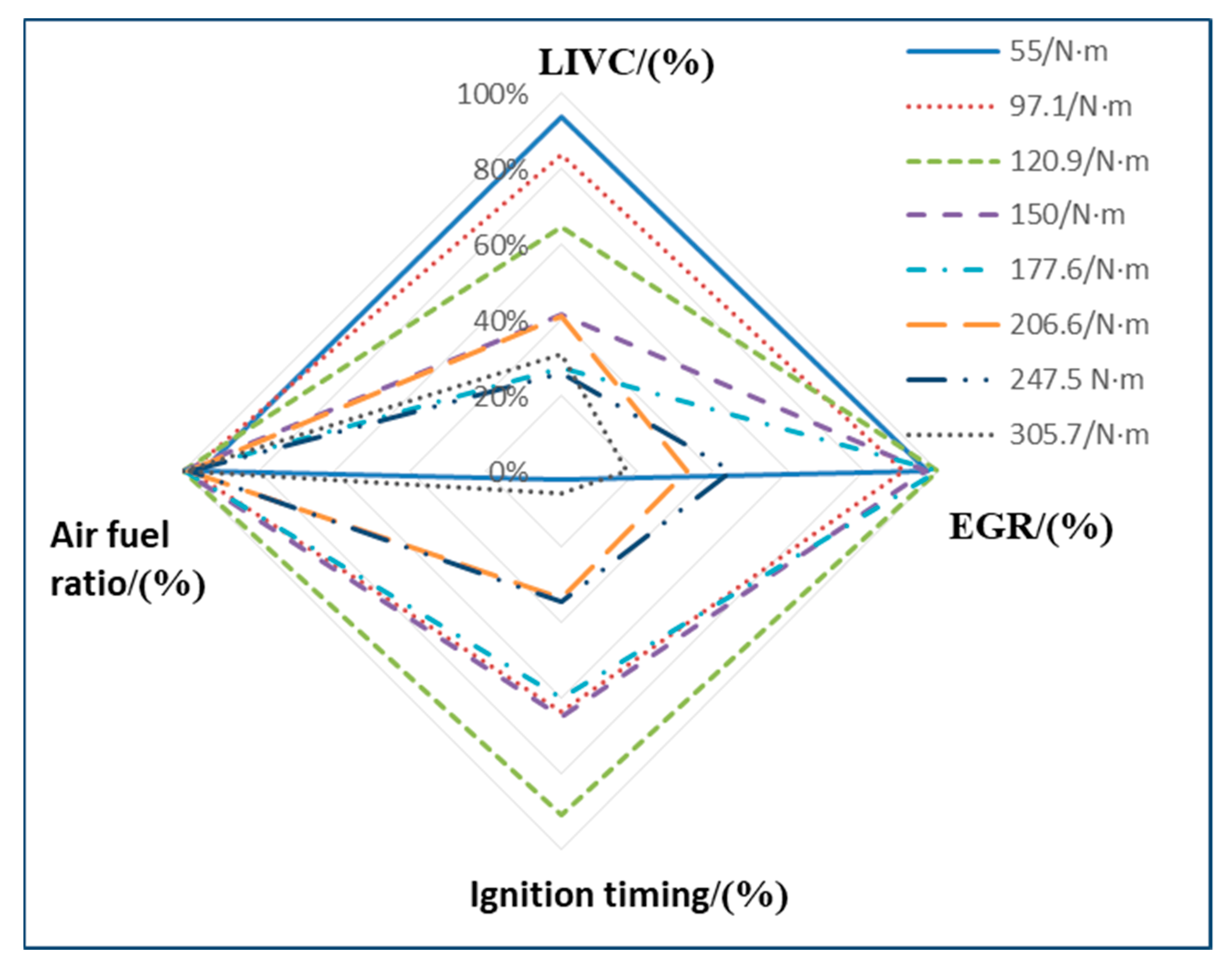
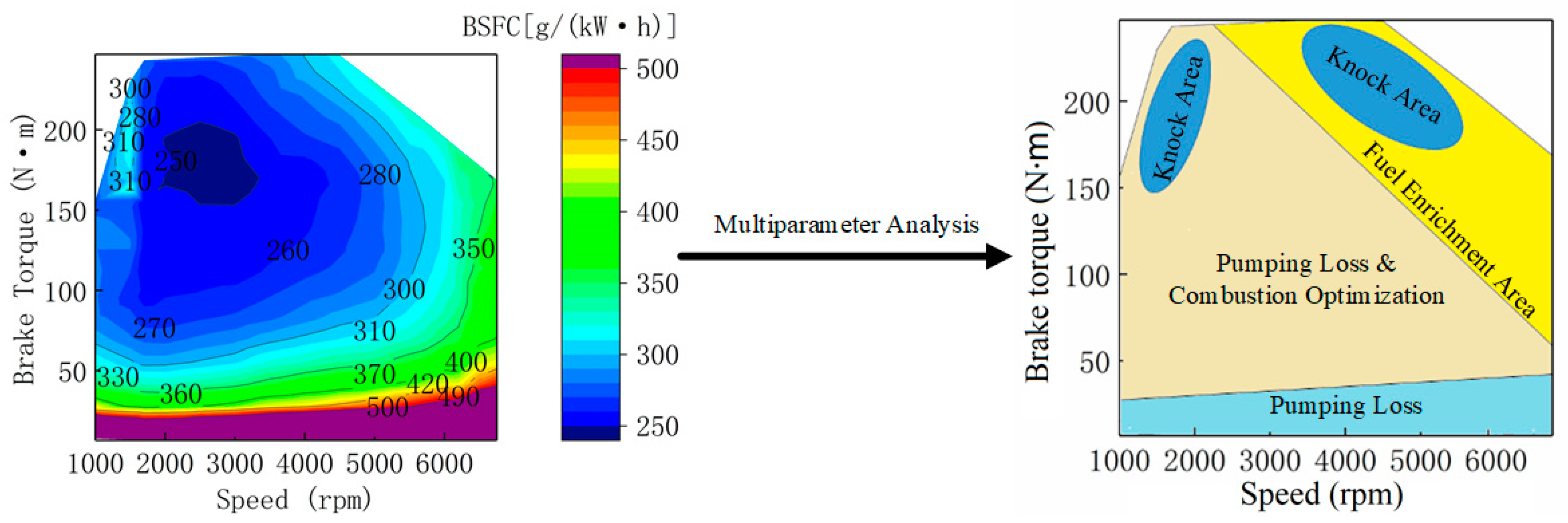
- The fitness function of traditional genetic algorithm often has a significant impact on the optimization results. For example, in the process of energy-saving optimization of EGR, LIVC, ignition advance angle, and other parameters, a multiparameter design will not only affect the fuel consumption but also affect the torque. If the torque is limited to a wide range in the fitness function, it will result in a comparison of BSFC of different loads, which will affect the judgment of the optimal value. However, if the torque is limited to a narrow range in the fitness function, the optimization of the different torques requires repeated genetic algorithm calculations, which increases the amount of calculation. CGA can realize the energy-saving optimization of different loads and improve optimization efficiency in the process of continuous iterative optimization. The optimization objective of CGA is to automatically obtain the lowest BSFC under different loads by optimizing engine control parameters such as LIVC angle, EGR, ignition advance angle, and air–fuel ratio, and avoid engine knocking. If the traditional genetic algorithm is used, the fitness function should consider the torque changes, and the BSFC for different torques has to be optimized for its own genetic algorithm. The CGA optimization costs less time.
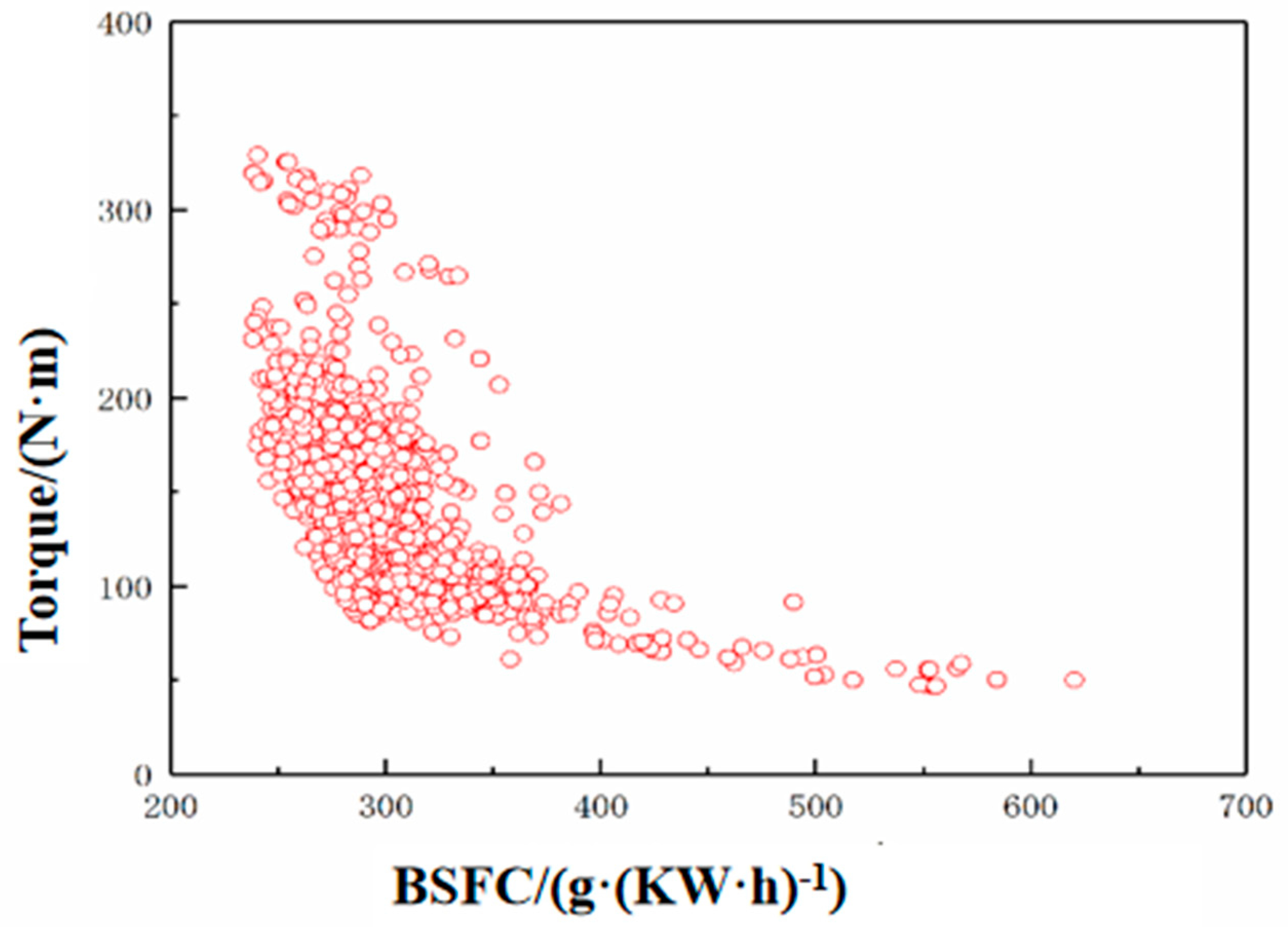
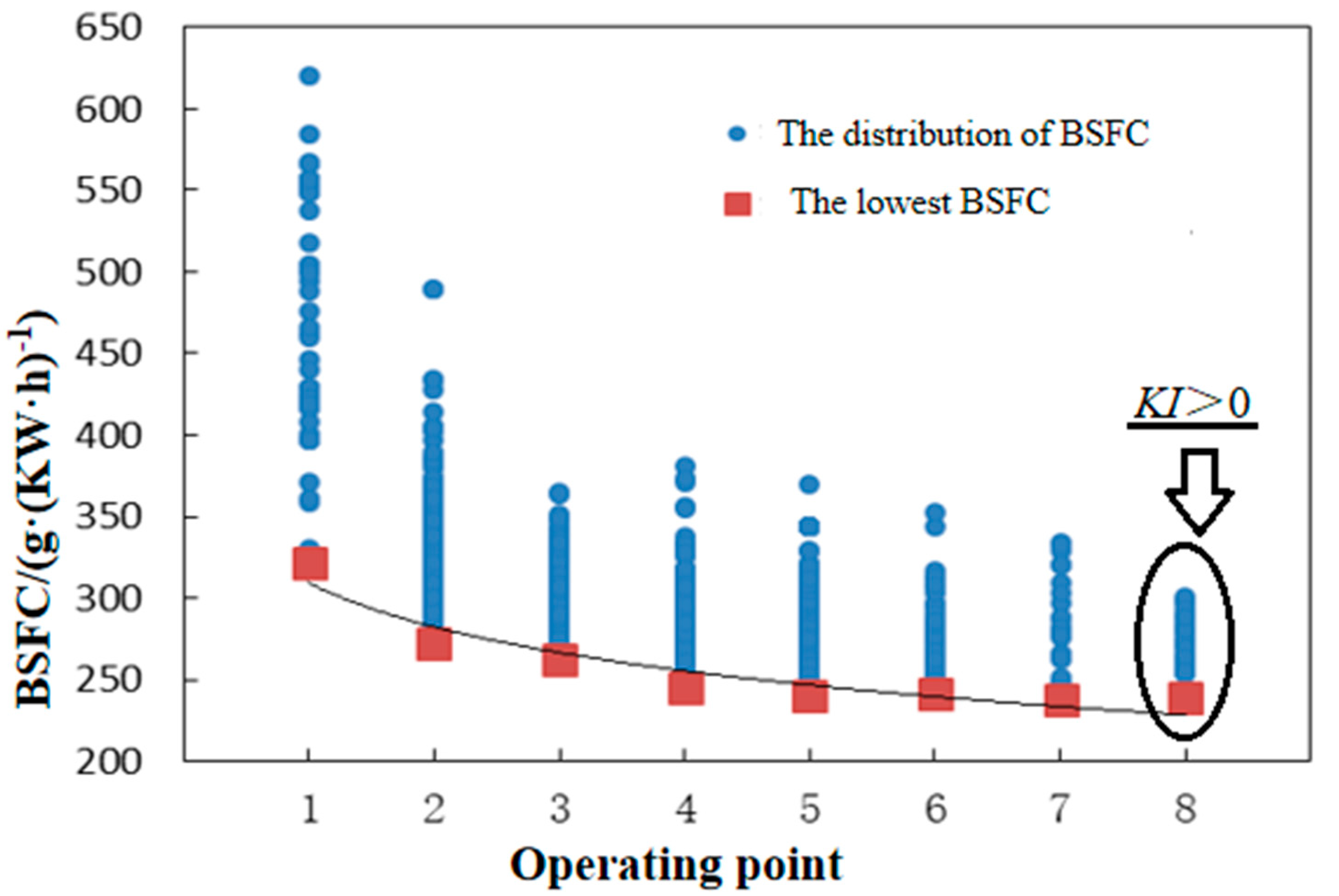
3.3. Optimization Objectives
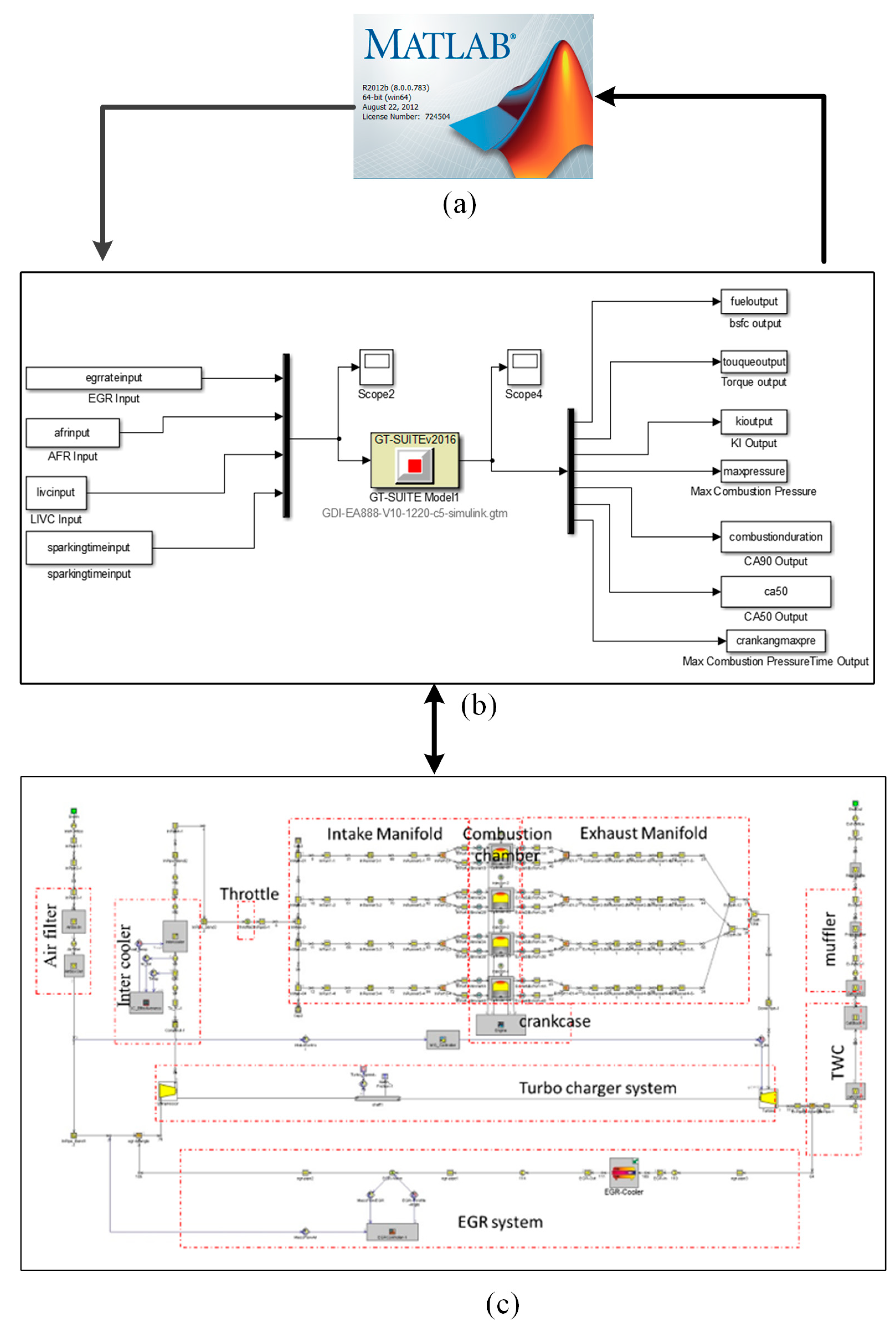
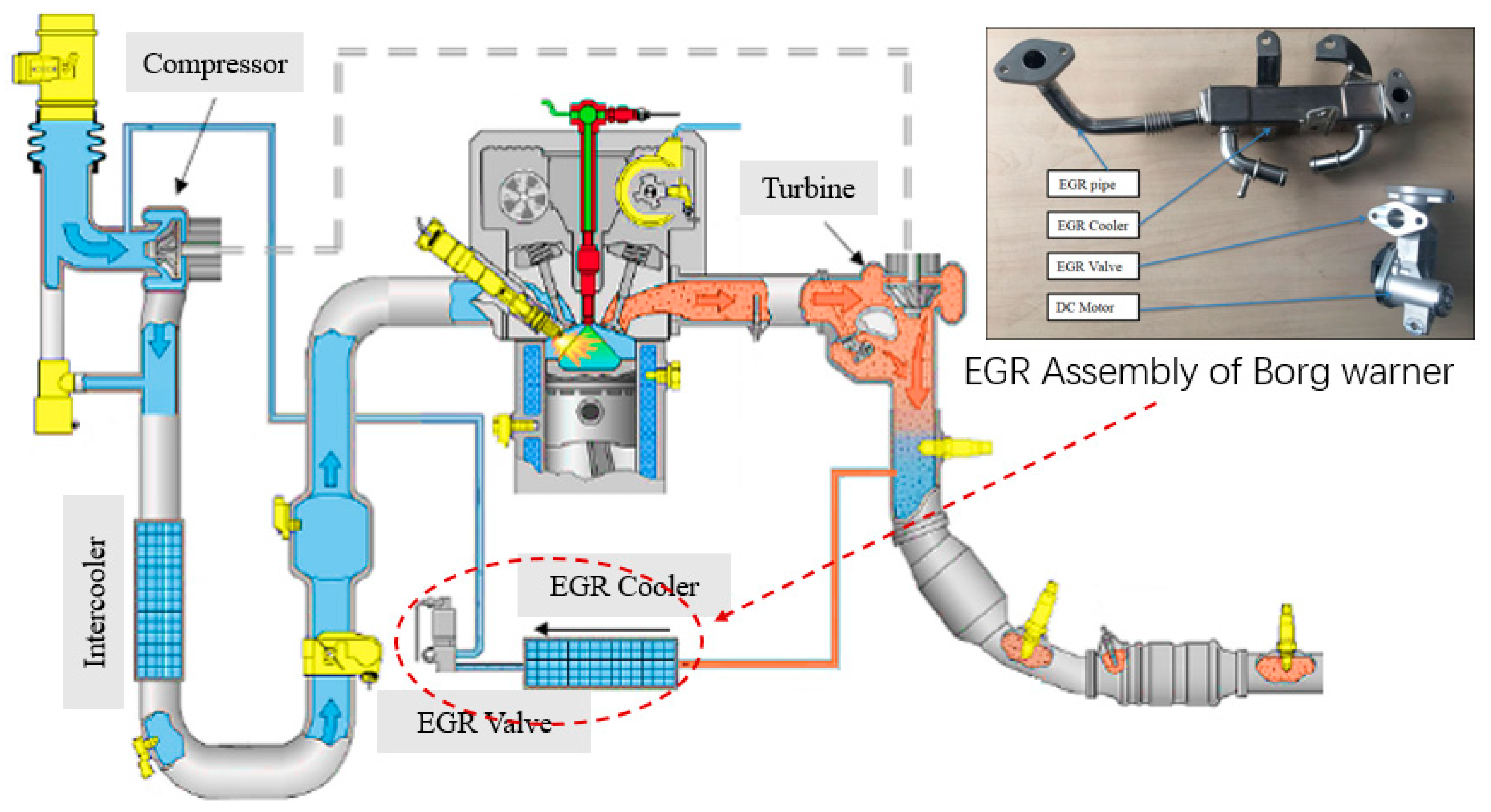
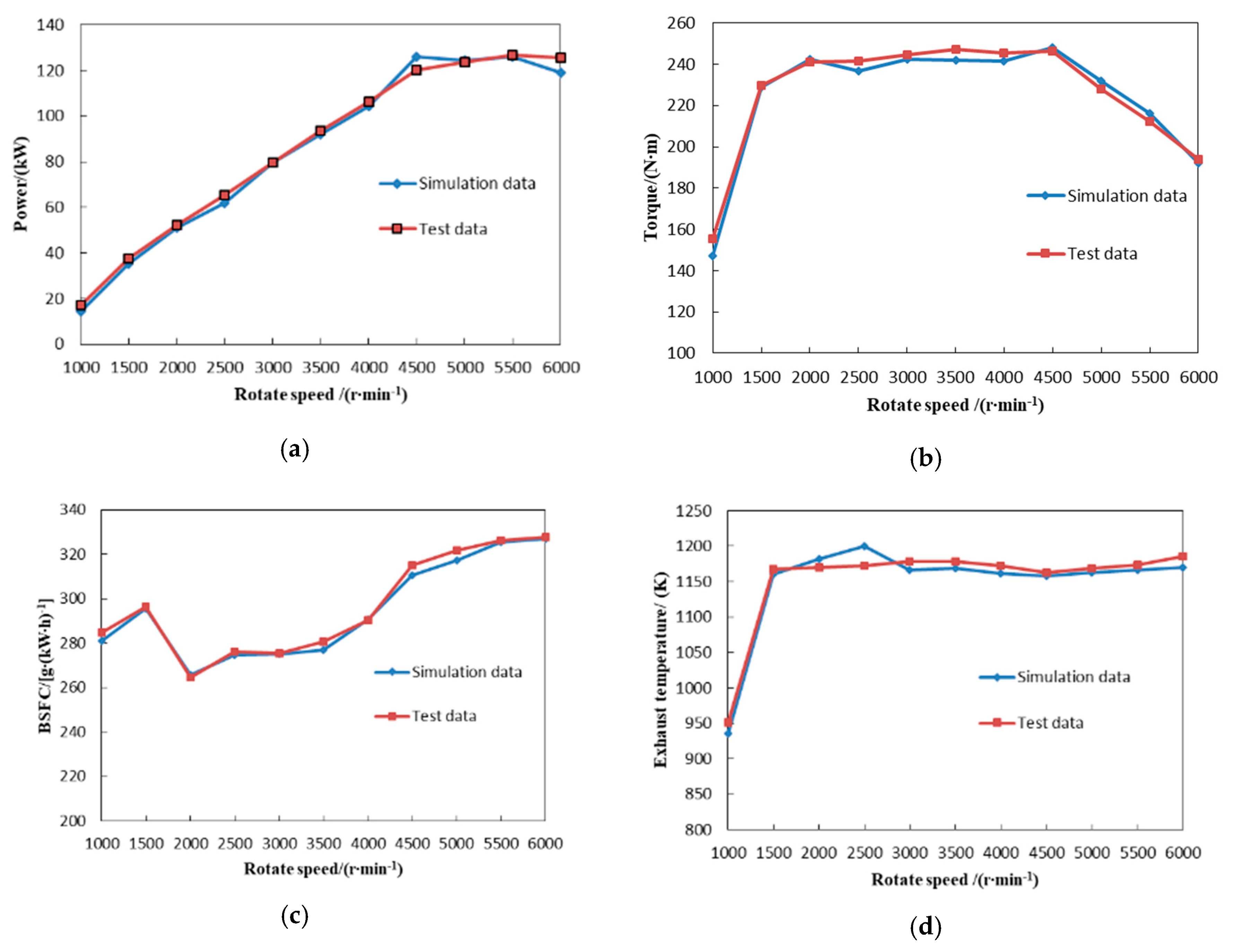
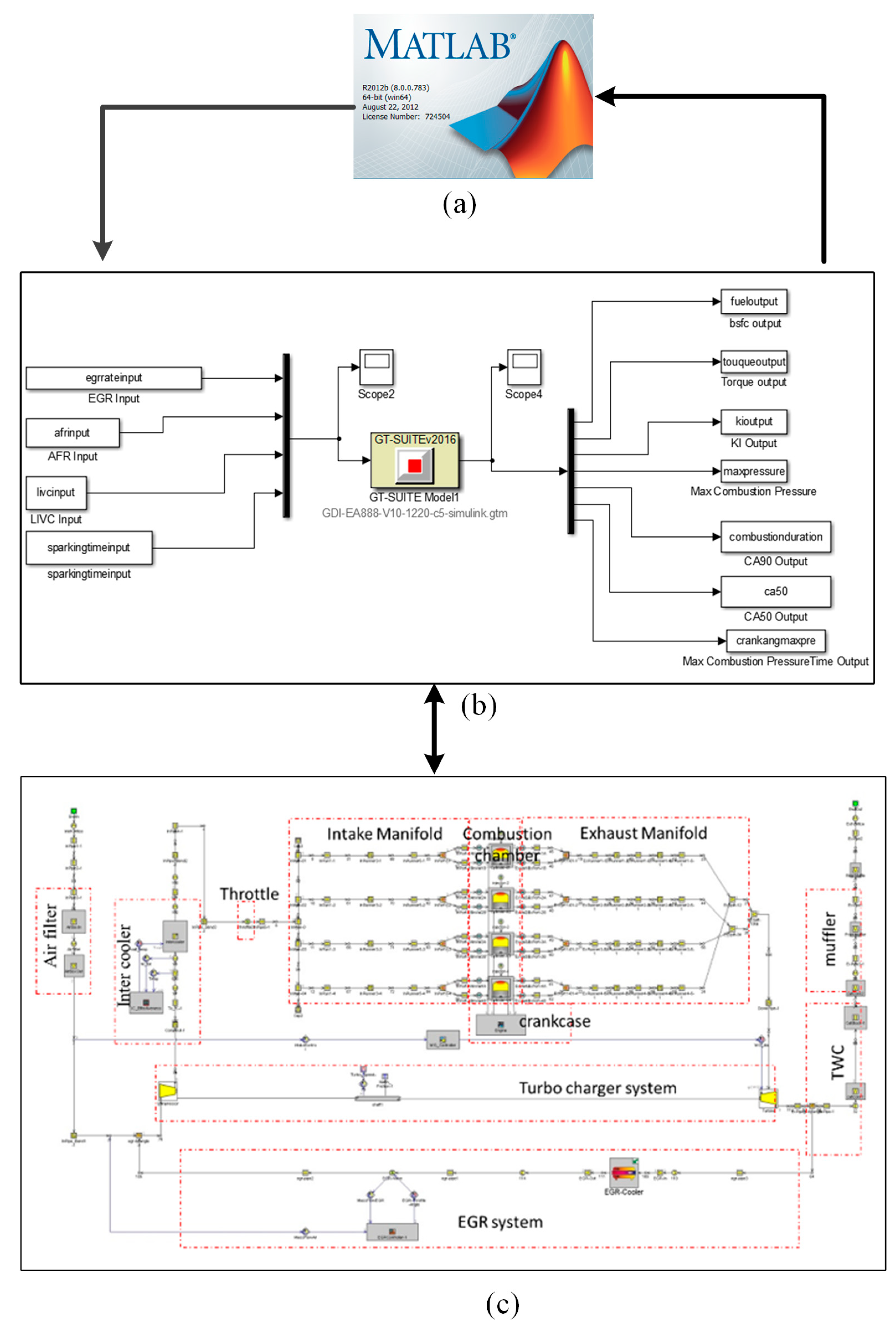
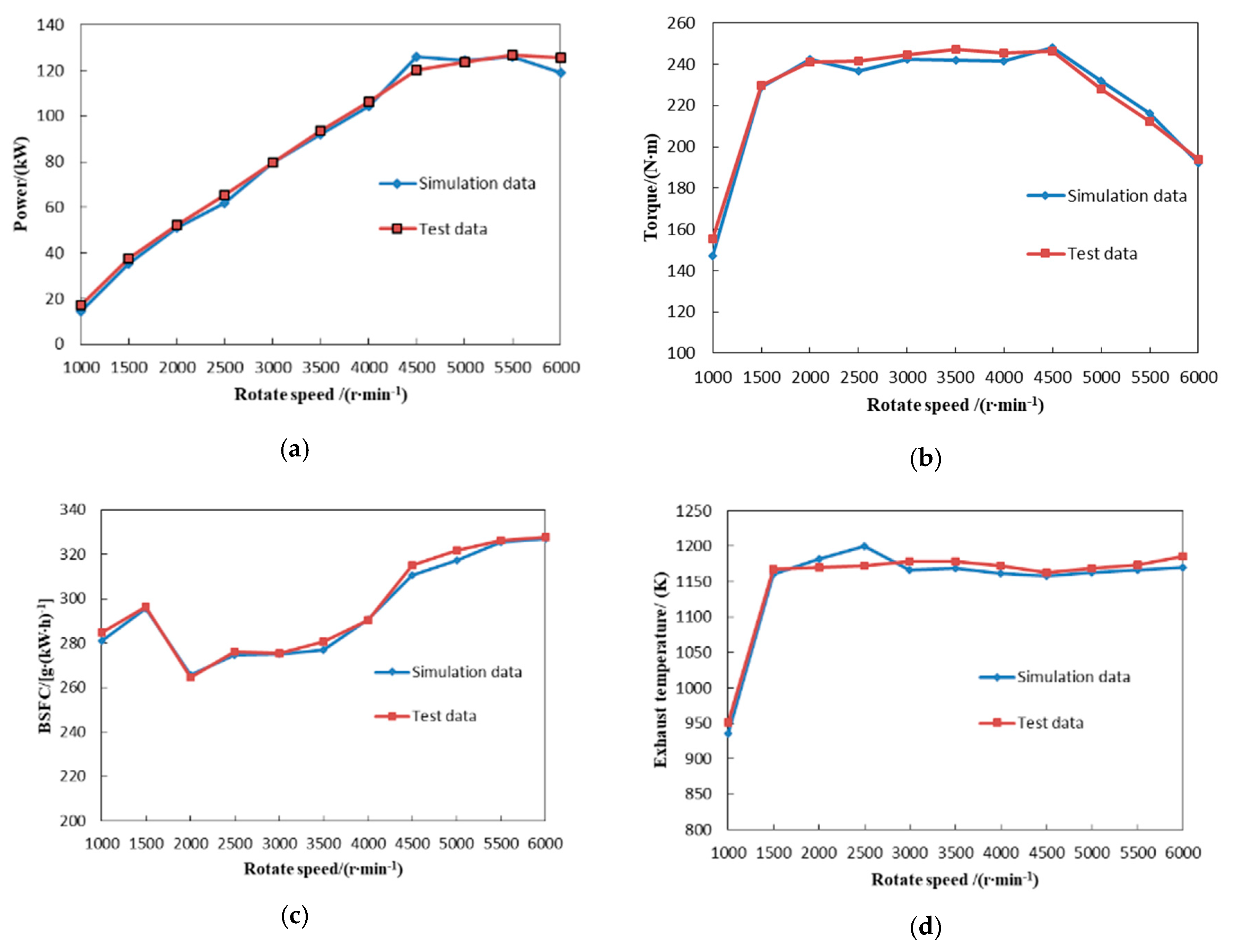
3.4. Digital Model and Physical Test Verification
4. Results
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Zhang, T.; Zou, Y.; Zhang, X.; Guo, N.; Wang, W. Data-Driven Based Cruise Control of Connected and Automated Vehicles Under Cyber-Physical System Framework. IEEE Trans. Intell. Transp. Syst. 2020, 22, 6307–6319. [Google Scholar] [CrossRef]
- Plakhotnikov, D.P.; Kotova, E.E. Design and Analysis of Cyber-Physical Systems. In Proceedings of the 2021 IEEE Conference of Russian Young Researchers in Electrical and Electronic Engineering (ElConRus), St. Petersburg, Russia, 26–29 January 2021. [Google Scholar]
- Guo, L.; Yang, B.; Ye, J.; Chen, H.; Li, F.; Song, W.; Du, L.; Guan, L. Systematic Assessment of Cyber-Physical Security of Energy Management System for Connected and Automated Electric Vehicles. IEEE Trans. Ind. Inform. 2020, 17, 3335–3347. [Google Scholar] [CrossRef]
- Wang, F.Y. The Emergence of Intelligent Enterprises: From CPS to CPSS. IEEE Intell. Syst. 2010, 25, 85–88. [Google Scholar] [CrossRef]
- Wang, F. Parallel Driving with Software Vehicular Robots for Safety and Smartness. IEEE Trans. Intell. Transp. Syst. 2014, 15, 1381–1387. [Google Scholar] [CrossRef]
- Fallah, Y.P.; Huang, C.; Sengupta, R.; Krishnan, H. Design of cooperative vehicle safety systems based on tight coupling of communication, computing and physical vehicle dynamics. In Proceedings of the IEEE International Conference on Cyber-Physical Systems, ACM, Stockholm, Sweden, 13–15 April 2010. [Google Scholar]
- Wan, J.; Zhang, D.; Zhao, S.; Yang, L.T.; Lloret, J. Context-aware vehicular cyber-physical systems with cloud support: Architecture, challenges, and solutions. Commun. Mag. IEEE 2014, 52, 106–113. [Google Scholar] [CrossRef]
- Kaiwartya, O.; Cao, Y.; Lloret, J.; Kumar, S.; Aslam, N.; Kharel, R.; Abdullah, A.H.; Shah, R.R. Geometry-based Localization for GPS Outage in Vehicular Cyber Phsical Systems. IEEE Trans. Veh. Technol. 2018, 67, 3800–3812. [Google Scholar] [CrossRef]
- Lv, C.; Wang, H.; Zhao, B.; Cao, D.; Huaji, W.; Zhang, J.; Li, Y.; Yuan, Y. Cyber-Physical System Based Optimization Framework for Intelligent Powertrain Control. SAE Int. J. Commer. Veh. 2017, 10, 254–264. [Google Scholar] [CrossRef]
- Li, W.; Lin, Z.; Zhou, H.; Yan, G. Multi-objective optimization for cyber-physical-social systems: A case study of electric vehicles charging and discharging. IEEE Access 2019, 7, 76754–76767. [Google Scholar] [CrossRef]
- Wu, Y.; Zhang, S.; Hao, J.; Liu, H.; Wu, X.; Hu, J.; Walsh, M.P.; Wallington, T.J.; Zhang, K.M.; Stevanovic, S. On-road vehicle emissions and their control in China: A review and outlook. Sci. Total Environ. 2017, 574, 332–349. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Park, C.; Ebisu, M.; Bae, C. Improvement of instantaneous turbine efficiency through late intake valve phase (LIVP) in a turbocharged-gasoline direct injection (T-GDI) engine. Appl. Therm. Eng. 2020, 181, 115976. [Google Scholar] [CrossRef]
- Yin, C.; Pan, H.; Zhang, Z.; Zhu, H.; Shen, K. Effect of EGR Combined with Intense Tumble Flow on a Well-Calibrated Commercial Turbocharged GDI Engine. Int. J. Automot. Technol. 2021, 22, 1347–1361. [Google Scholar] [CrossRef]
- Zhang, Z.F.; Shu, G.Q.; Liang, X.Y.; Liu, G.Q.; Yang, W.L.; Wang, Z. Super Knock and Preliminary Investigation of Its Influences on Turbocharged GDI Engine. Trans. Csice 2011, 29, 422–426. [Google Scholar]
- Alger, T.; Chauvet, T.; Dimitrova, Z. Synergies between high EGR operation and GDI systems. SAE Int. J. Engines 2009, 1, 101–114. [Google Scholar] [CrossRef]
- Randolph, E.; Fieseler, K.; Conway, G.; Alger, T.; Chadwell, C. The Effects of EGR Composition on Combustion Performance and Efficiency. SAE Int. J. Adv. Curr. Prac. Mobil. 2021, 3, 250–261. [Google Scholar] [CrossRef]
- Gong, C.; Si, X.; Liu, F. Combined effects of excess air ratio and EGR rate on combustion and emissions behaviors of a GDI engine with CO2 as simulated EGR (CO2) at low load and different spark timings. Fuel 2021, 293, 120442. [Google Scholar] [CrossRef]
- Shen, K.; Li, F.; Zhang, Z.; Sun, Y.; Yin, C. Effects of LP and HP cooled EGR on performance and emissions in turbocharged GDI engine. Appl. Therm. Eng. 2017, 125, 746–755. [Google Scholar] [CrossRef]
- Wei, H.; Zhu, T.; Shu, G.; Tan, L.; Wang, Y. Gasoline engine exhaust gas recirculation—A review. Appl. Energy 2012, 99, 534–544. [Google Scholar] [CrossRef]
- Kargul, J.; Stuhldreher, M.; Barba, D.; Schenk, C.; Bohac, S.; McDonald, J.; Dekraker, P. Benchmarking a 2018 Toyota Camry 2.5-liter Atkinson cycle engine with cooled-EGR. SAE Int. J. Adv. Curr. Pract. Mobil. 2019, 1, 601. [Google Scholar] [PubMed]
- Shen, K.; Xu, Z.; Chen, H.; Zhang, Z. Investigation on the EGR effect to further improve fuel economy and emissions effect of Miller cycle turbocharged engine. Energy 2021, 215, 119116. [Google Scholar] [CrossRef]
- Liu, Y.; Peng, Y.; Wang, B.; Yao, S.; Liu, Z. Review on cyber-physical systems. IEEE/CAA J. Autom. Sin. 2017, 4, 27–40. [Google Scholar] [CrossRef]
- Leitao, P.; Colombo, A.W.; Karnouskos, S. Industrial automation based on cyber-physical systems technologies: Prototype implementations and challenges. Comput. Ind. 2016, 81, 11–25. [Google Scholar] [CrossRef] [Green Version]
- Zhu, Z.; Lin, R.; Du, A.; Chen, Y. Numerical analysis of the fuel economy and dynamic performance of a GDI engine using EGR coupled high expansion ratio cycle. In Proceedings of the 2018 4th International Conference on Environmental Science and Material Application, Beijing, China, 28–29 October 2018. [Google Scholar]
- Mahdavi, M.; Alhelou, H.H.; Bagheri, A.; Djokic, S.Z.; Ramos, R.A.V. A Comprehensive Review of Metaheuristic Methods for the Reconfiguration of Electric Power Distribution Systems and Comparison with a Novel Approach Based on Efficient Genetic Algorithm. IEEE Access 2021, 9, 122872–122906. [Google Scholar] [CrossRef]
- Steinley, D. K-means clustering: A half-century synthesis. Br. J. Math. Stat. Psychol. 2006, 59, 1–34. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Yang, J.; Zhao, C. Survey on K-Means Clustering Algorithm. Comput. Eng. Appl. 2019, 55, 7–14, 63. [Google Scholar]
- Sinaga, K.P.; Yang, M.S. Unsupervised K-means clustering algorithm. IEEE Access 2020, 8, 80716–80727. [Google Scholar] [CrossRef]
- Salata, F.; Ciancio, V.; Dell′Olmo, J.; Golasi, I.; Palusci, O.; Coppi, M. Effects of local conditions on the multi-variable and multi-objective energy optimization of residential buildings using genetic algorithms. Appl. Energy 2020, 260, 114289. [Google Scholar] [CrossRef]
- Ahmed, M.; Seraj, R.; Islam, S.M.S. The k-means Algorithm: A Comprehensive Survey and Performance Evaluation. Electronics 2020, 9, 1295. [Google Scholar] [CrossRef]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Engine Parameters | Value |
|---|---|
| Displayed volume | 1.8 L |
| Stroke | 84.1 mm |
| Bore | 82.5 mm |
| Connecting Rod | 146 mm |
| Compression ratio | 9.6 |
| Power Max. (kW/rpm) | 118/5000 |
| Torque Max. (N·m/rpm) | 250/2000 |
| Number of valves | 4 (2 intake, 2 exhaust) |
| Injection | GDI |
| Fuel | Gasoline #96 of Chinese Standard |
| Speed/rpm | 1000 | 1500 | 2000 | 2500 | 3000 | 3500 | 4000 | 4500 | 5000 | 5500 | 6000 |
|---|---|---|---|---|---|---|---|---|---|---|---|
| A/F | 15.2 | 14.5 | 14.3 | 14.0 | 13.4 | 13.0 | 12.4 | 11.9 | 11.9 | 11.9 | 12.1 |
| Atmospheric pressure/MPa | 0.1 | 0.1 | 0.1 | 0.1 | 0.1 | 0.1 | 0.1 | 0.1 | 0.1 | 0.1 | 0.1 |
| Temperature/°C | 20 | 20 | 20 | 20 | 20 | 20 | 20 | 20 | 20 | 20 | 20 |
| Ignition angle/°CA | −7.5 | −13.3 | −4 | −1 | 6.2 | 9.2 | 10.8 | 13.0 | 15.5 | 18.6 | 23.7 |
| Intake mass/g/s | 19.0 | 41.9 | 65.0 | 65.7 | 79.3 | 91.6 | 103.3 | 120. | 126.7 | 131.8 | 130.9 |
| IVO/°CA | −22 | −22 | −15.7 | −12.5 | −12 | −9 | −0.3 | 4.5 | 8.3 | 9.5 | 9.7 |
| Throttle percentage/% | 100 | 100 | 100 | 100 | 100 | 100 | 100 | 100 | 100 | 100 | 100 |
| Operating Point | Statistical Number | The Clustering Center/N·m | EGR Rate |
|---|---|---|---|
| 1 | 91 | 55 | 14.6% |
| 2 | 253 | 97.1 | 13.6% |
| 3 | 190 | 120.9 | 15% |
| 4 | 158 | 150 | 14.5% |
| 5 | 166 | 177.6 | 15% |
| 6 | 69 | 206.6 | 5% |
| 7 | 33 | 247.5 | 7% |
| 8 | 45 | 305.7 | 2.6% |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Sun, Y.; Zhu, Z.; Du, A.; Chen, X. Multiparameter Optimization Framework of Cyberphysical Systems: A Case Study on Energy Saving of the Automotive Engine. Actuators 2021, 10, 330. https://doi.org/10.3390/act10120330
Sun Y, Zhu Z, Du A, Chen X. Multiparameter Optimization Framework of Cyberphysical Systems: A Case Study on Energy Saving of the Automotive Engine. Actuators. 2021; 10(12):330. https://doi.org/10.3390/act10120330
Chicago/Turabian StyleSun, Youding, Zhongpan Zhu, Aimin Du, and Xinwen Chen. 2021. "Multiparameter Optimization Framework of Cyberphysical Systems: A Case Study on Energy Saving of the Automotive Engine" Actuators 10, no. 12: 330. https://doi.org/10.3390/act10120330
APA StyleSun, Y., Zhu, Z., Du, A., & Chen, X. (2021). Multiparameter Optimization Framework of Cyberphysical Systems: A Case Study on Energy Saving of the Automotive Engine. Actuators, 10(12), 330. https://doi.org/10.3390/act10120330