
A Study on Vision-Based Backstepping Control for a Target Tracking System



Abstract
1. Introduction
- A complete model is derived representing the target tracking system with the gimbaled mechanism and image measurements.
- A new control scheme for visual servoing systems is proposed. The novelty of this approach is that the couplings in both the gimbal kinematics and imaging geometry are decoupled using a new technique, namely the calculation of additional orientation. Then, the vision-based target tracking system can be expressed with recursive structures of separate SISO systems. Therefore, conventional control schemes can be easily implemented.
- The stability of the closed-loop system is analyzed. Simulation and experimental results are presented and discussed; thus, the effectiveness of the proposed system is validated.
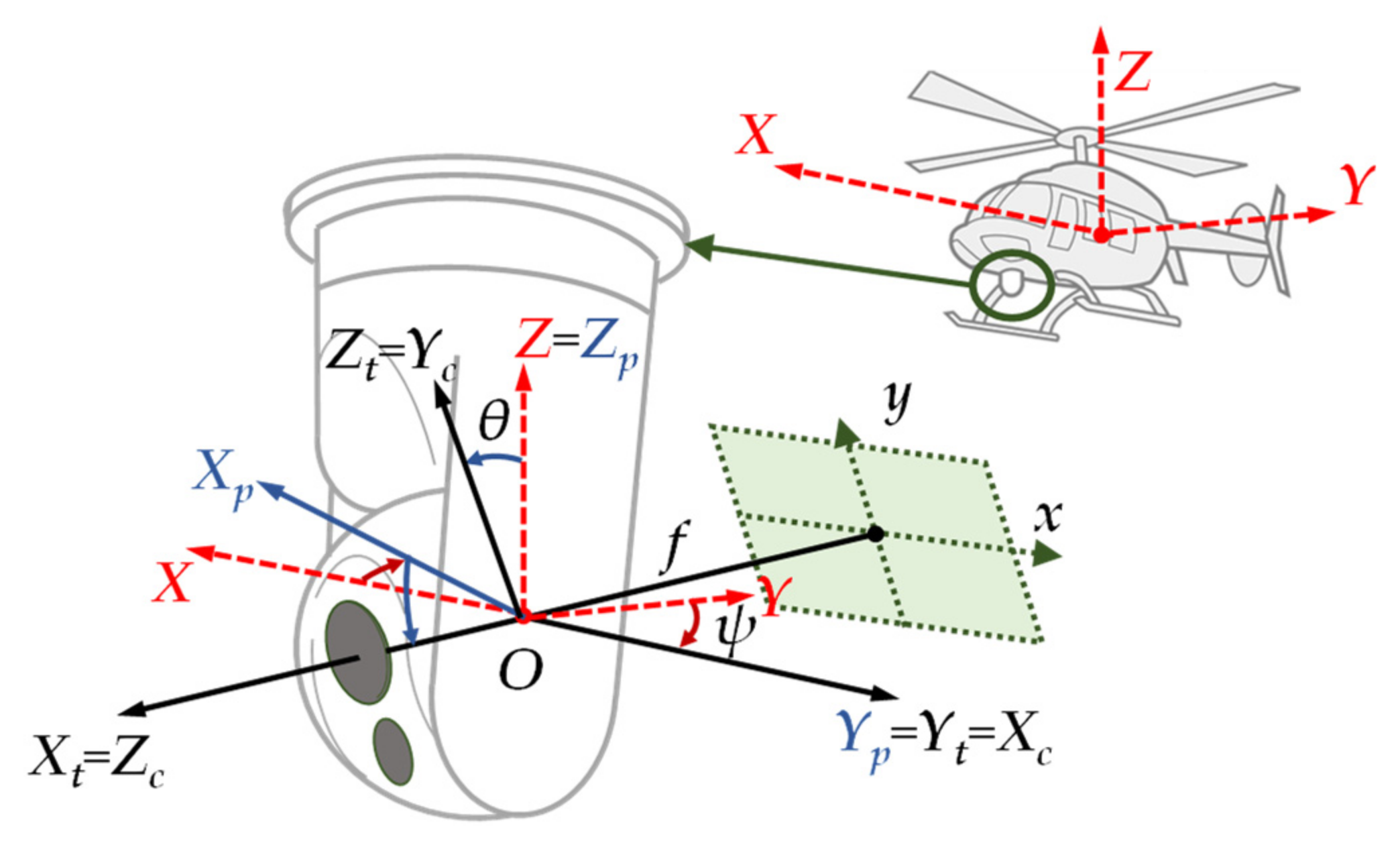
2. System Model
2.1. System Kinematics
2.2. System Dynamics and Actuation Model
3. Vision-Based Tracking Control System
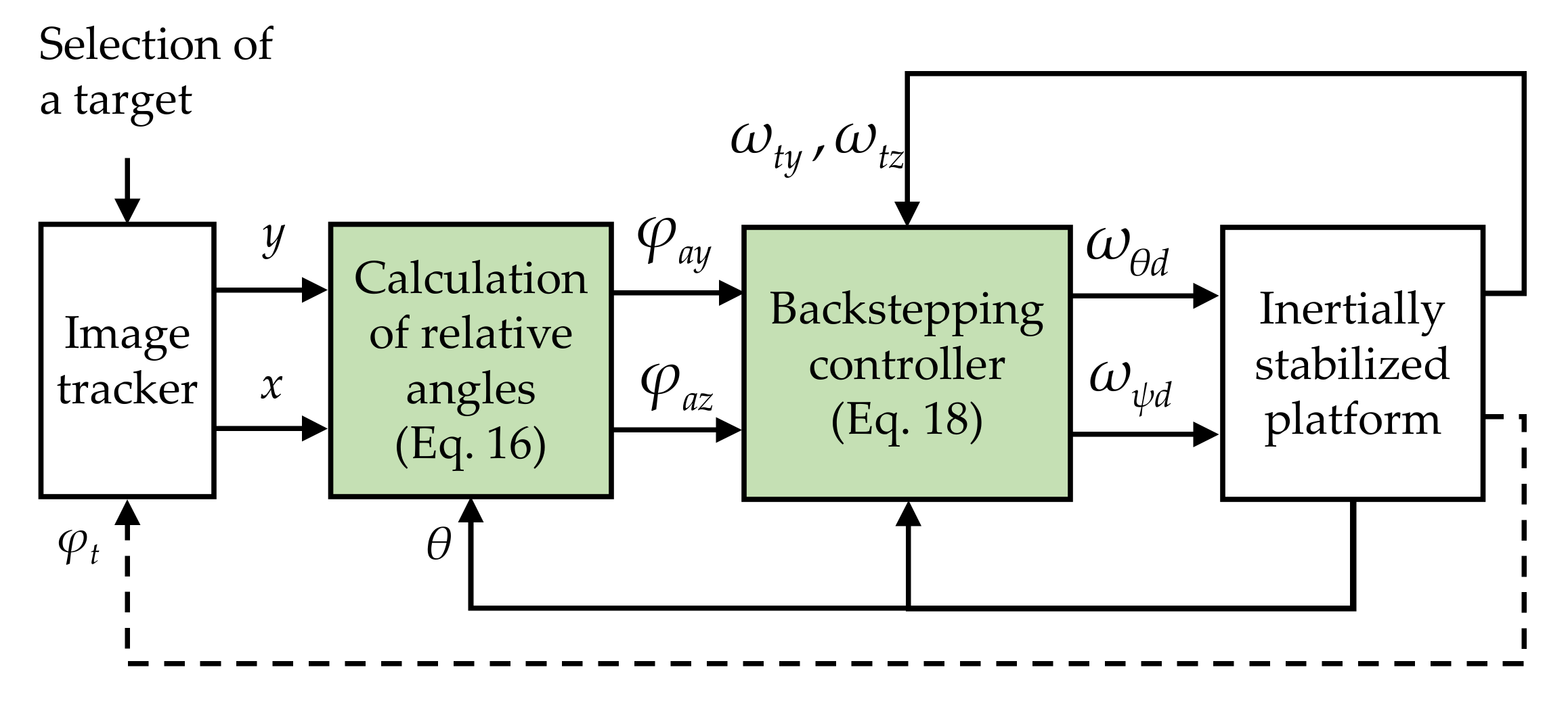
3.1. Vision-Based Backstepping Control
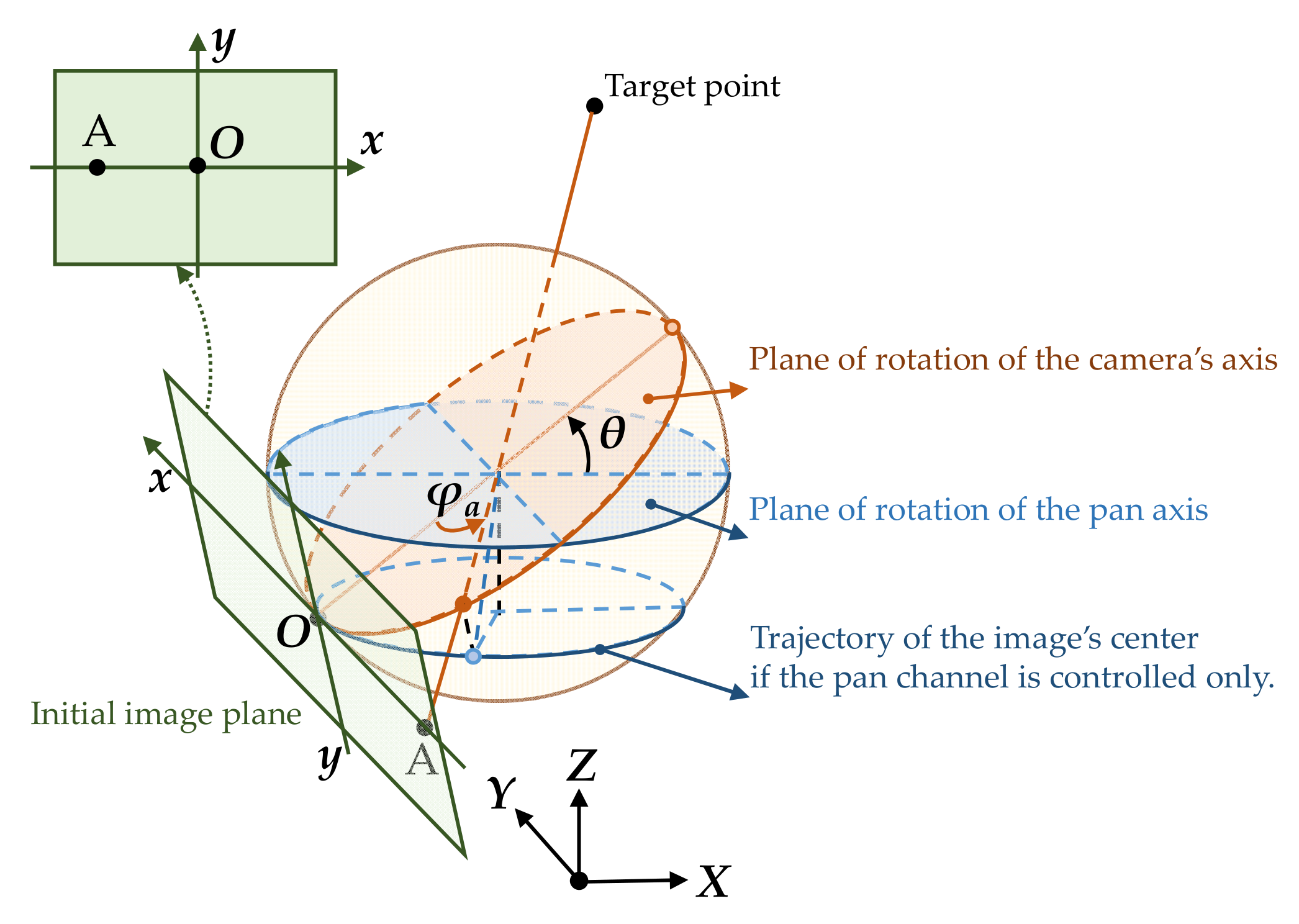
3.1.1. Calculation of Additional Orientation
3.1.2. Backstepping Controller Design
3.2. Image-Based Pointing Control
4. Implementation, Simulations, and Experiments
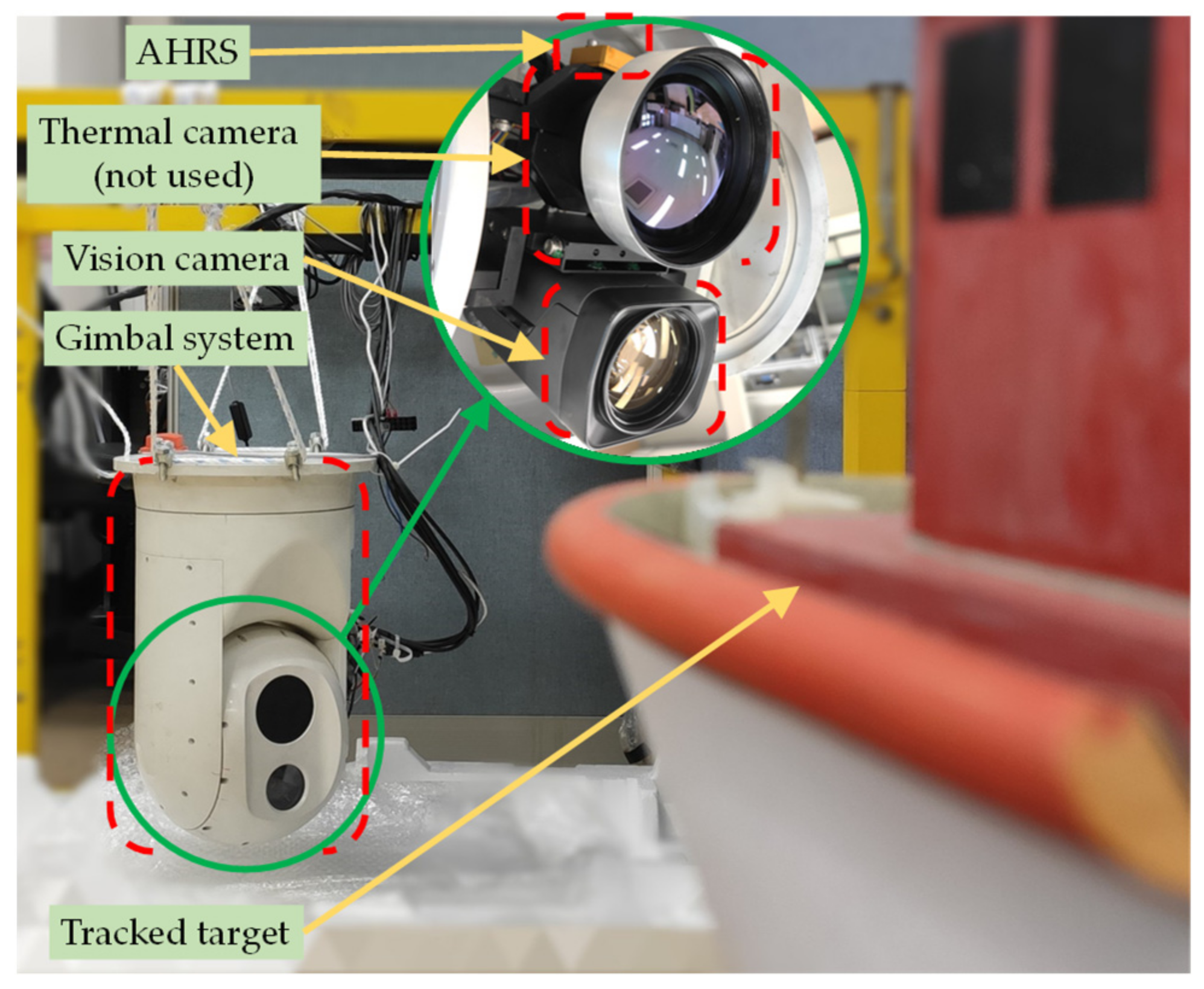
4.1. Implementation
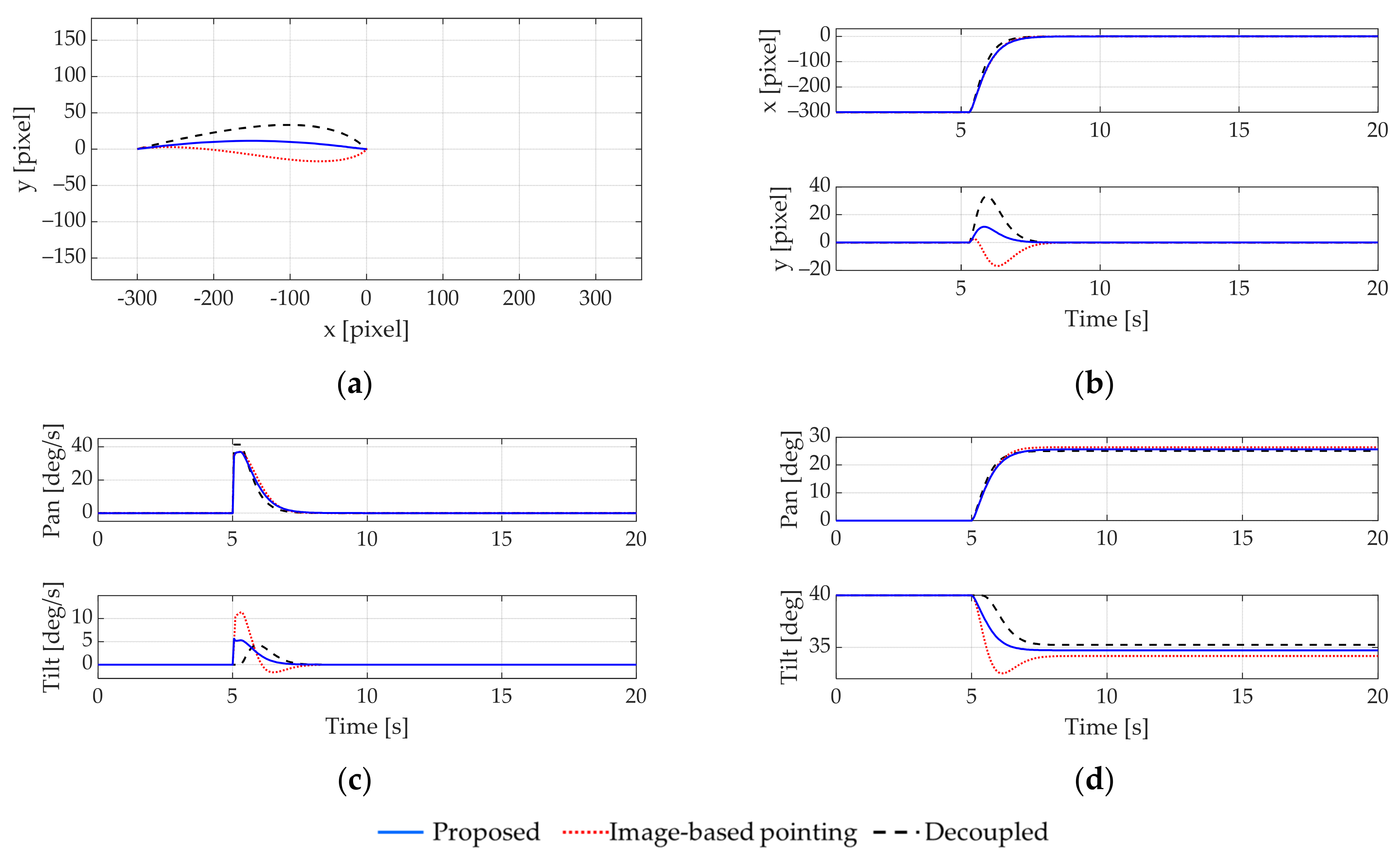
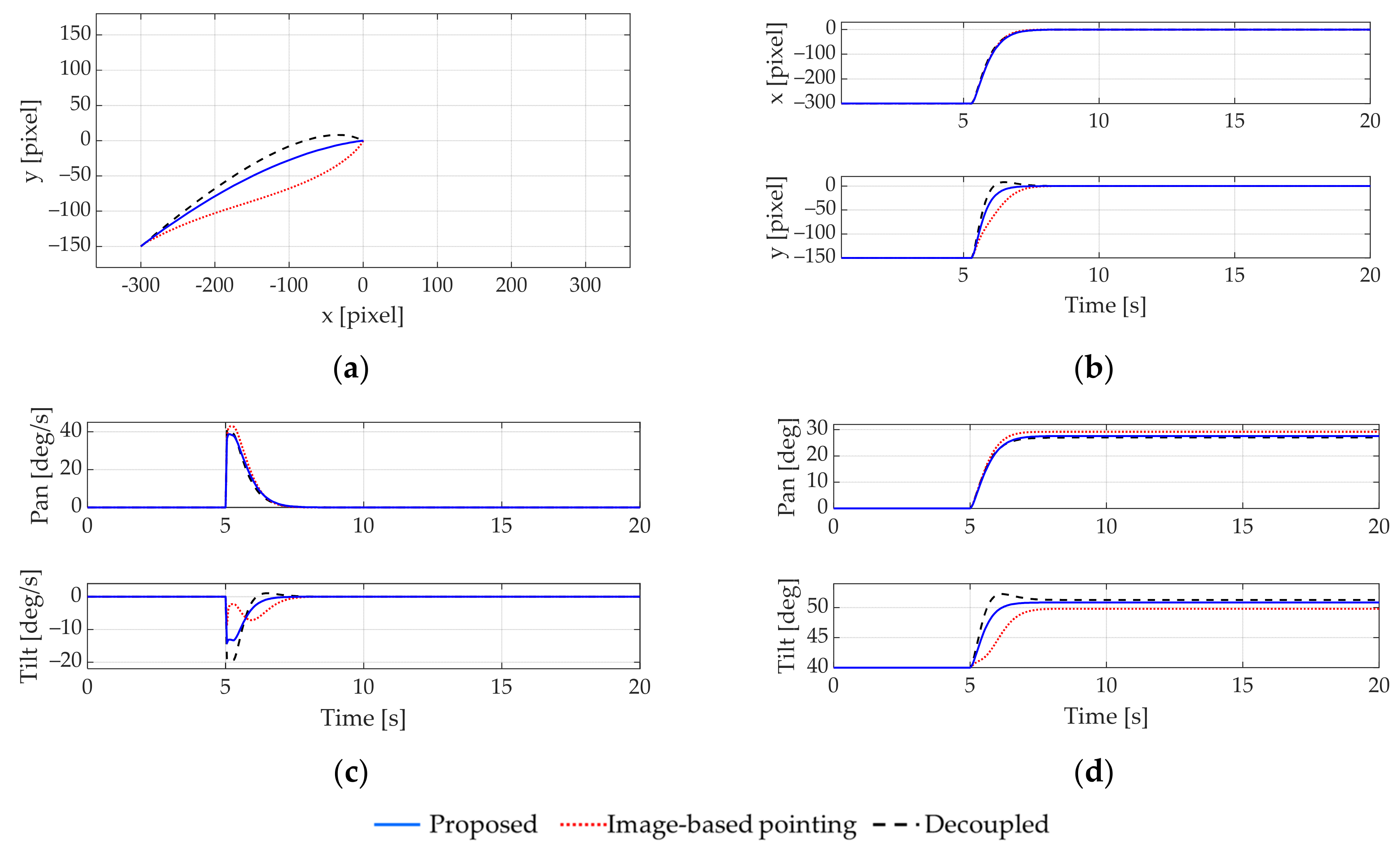
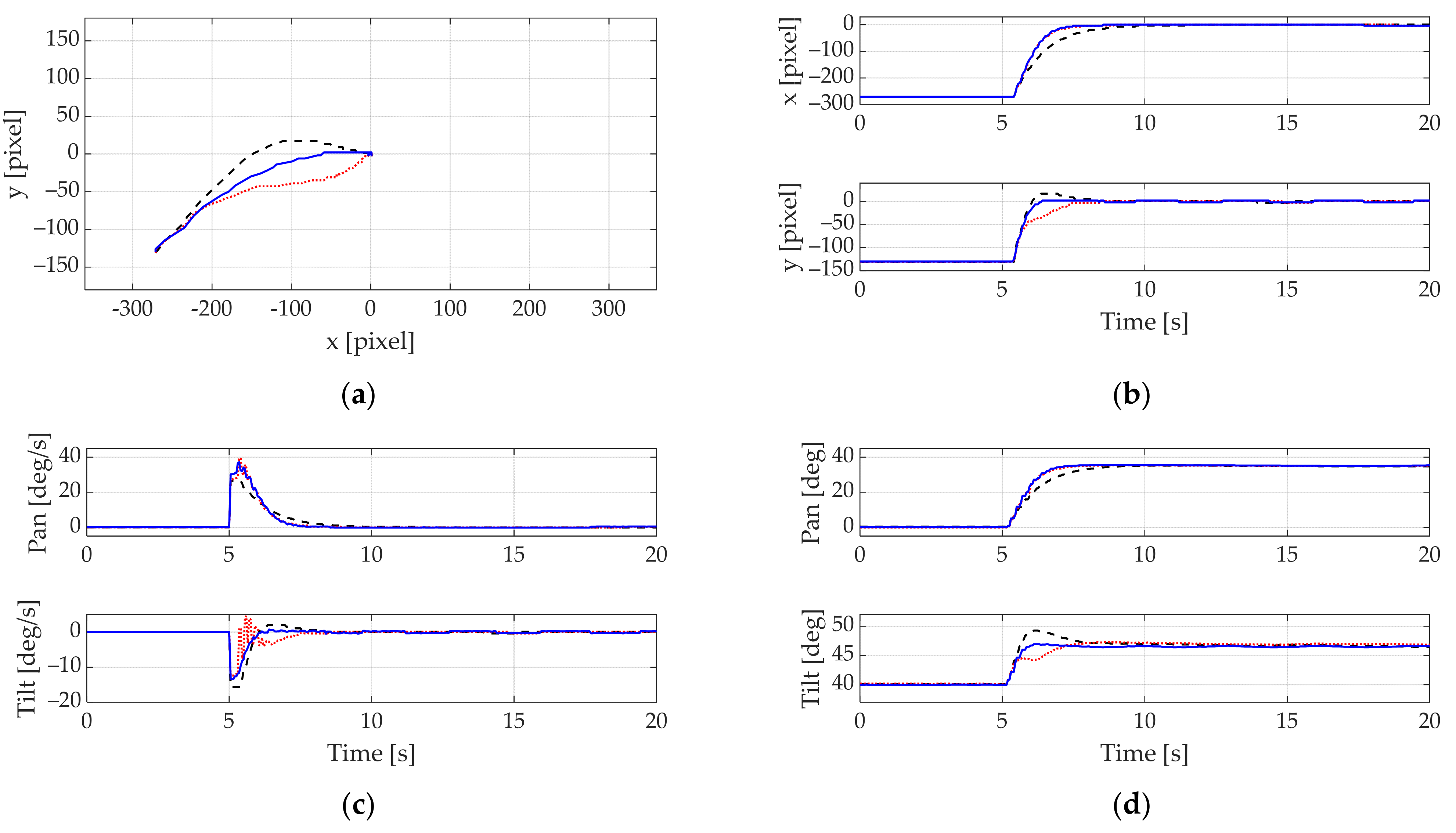
4.2. Simulation Studies
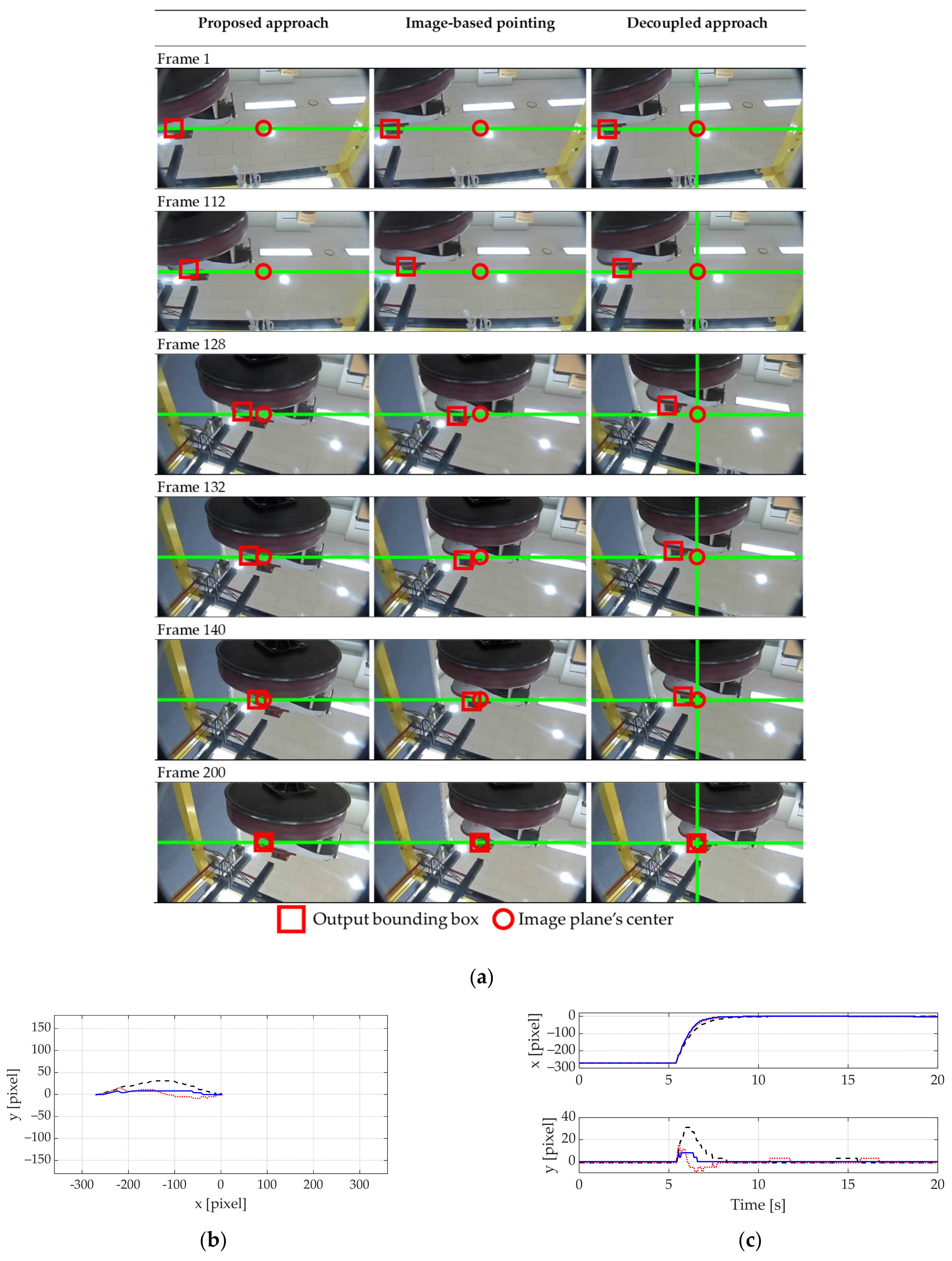
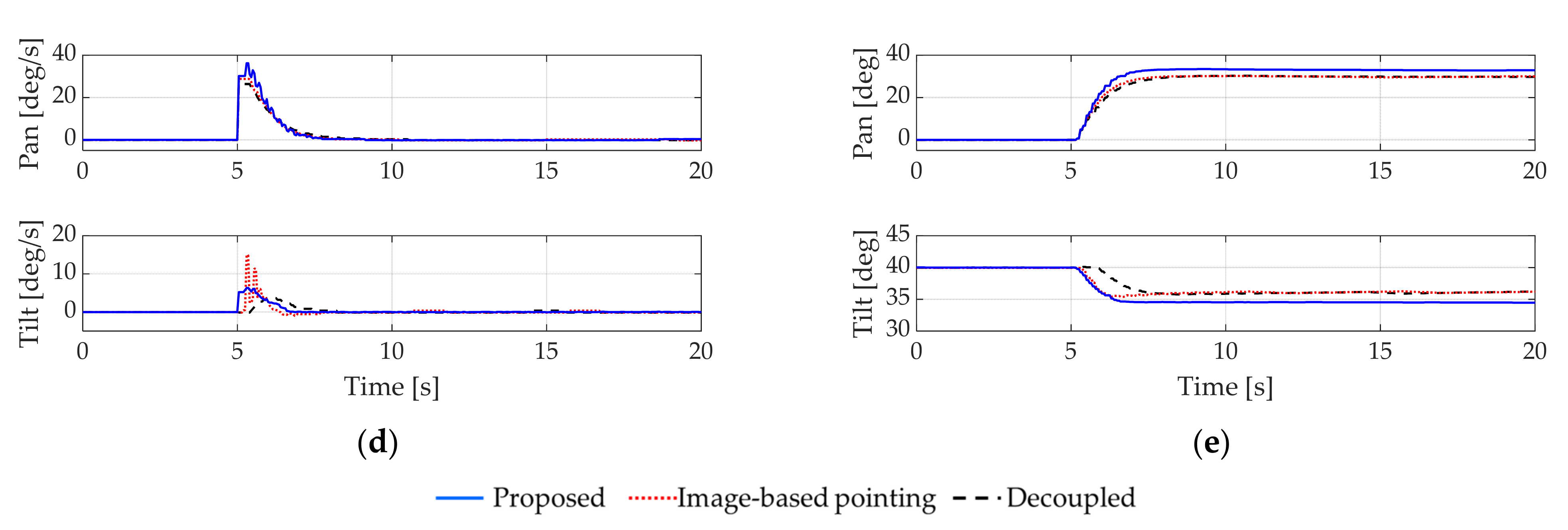
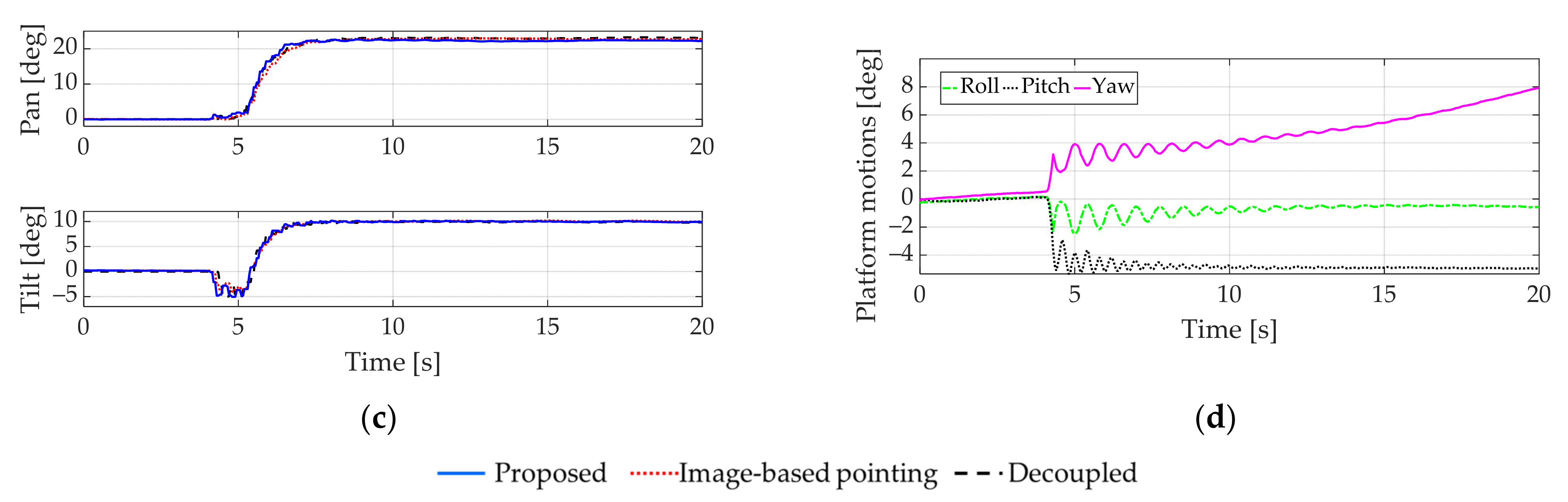
4.3. Experiments
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Chaumette, F.; Hutchinson, S. Visual servo control. I. Basic approaches. IEEE Robot. Autom. Mag. 2006, 13, 82–90. [Google Scholar] [CrossRef]
- Chaumette, F.; Hutchinson, S. Visual servo control. II. Advanced approaches [Tutorial]. IEEE Robot. Autom. Mag. 2007, 14, 109–118. [Google Scholar] [CrossRef]
- Yun-Hui, L.; Hesheng, W.; Chengyou, W.; Lam, K.K. Uncalibrated visual servoing of robots using a depth-independent interaction matrix. IEEE Trans. Robot. 2006, 22, 804–817. [Google Scholar] [CrossRef]
- Muis, A.; Ohnishi, K. Eye-to-hand approach on eye-in-hand configuration within real-time visual servoing. In Proceedings of the 8th IEEE International Workshop on Advanced Motion Control, Kawasaki, Japan, 28 March 2004; Volume 10, pp. 647–652. [Google Scholar]
- Liu, Z.; Wang, F.; Zhang, Y. Adaptive Visual Tracking Control for Manipulator With Actuator Fuzzy Dead-Zone Constraint and Unmodeled Dynamic. IEEE Trans. Syst. Man Cybern. Syst. 2015, 45, 1301–1312. [Google Scholar] [CrossRef]
- Li, B.; Zhang, X.; Fang, Y.; Shi, W. Visual Servoing of Wheeled Mobile Robots Without Desired Images. IEEE Trans. Cybern. 2019, 49, 2835–2844. [Google Scholar] [CrossRef] [PubMed]
- Mekonnen, G.; Kumar, S.; Pathak, P.M. Wireless hybrid visual servoing of omnidirectional wheeled mobile robots. Robot. Auton. Syst. 2016, 75, 450–462. [Google Scholar] [CrossRef]
- Serra, P.; Cunha, R.; Hamel, T.; Cabecinhas, D.; Silvestre, C. Landing of a Quadrotor on a Moving Target Using Dynamic Image-Based Visual Servo Control. IEEE Trans. Robot. 2016, 32, 1524–1535. [Google Scholar] [CrossRef]
- Zheng, D.; Wang, H.; Wang, J.; Chen, S.; Chen, W.; Liang, X. Image-Based Visual Servoing of a Quadrotor Using Virtual Camera Approach. IEEE/ASME Trans. Mechatron. 2017, 22, 972–982. [Google Scholar] [CrossRef]
- Jabbari Asl, H.; Yoon, J. Adaptive vision-based control of an unmanned aerial vehicle without linear velocity measurements. ISA Trans. 2016, 65, 296–306. [Google Scholar] [CrossRef]
- Yuen, H.P.; Choi, Y.W.; Kim, Y.B. Implementation of Tracking-Learning-Detection for Improving of a Stereo-Camera-based Marker-less Distance Measurement System for Vessel Berthing. In Proceedings of the 2020 16th IEEE International Colloquium on Signal Processing and its Applications, Langkawi, Malaysia, 28–29 February 2020; pp. 63–68. [Google Scholar]
- Hilkert, J.M. Inertially Stabilized Platform Technology Concepts and Principles. IEEE Control Syst. 2008, 28, 26–46. [Google Scholar] [CrossRef]
- Masten, M.K. Inemally Stabilized Platforms for Optical Imaging Systems Tracking Dynamic Targets with Mobile Sensors. IEEE Control Syst. 2008, 28, 47–64. [Google Scholar] [CrossRef]
- Osborne, J.M.; Fuentes, R. Global Analysis of the Double- Gimbal Mechanism. IEEE Control Syst. 2008, 28, 44–64. [Google Scholar] [CrossRef]
- Jianbo, S.; Tomasi, C. Good features to track. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Seattle, WA, USA, 21–23 June 1994; pp. 593–600. [Google Scholar]
- Tomasi, C.; Kanade, T. Detection and Tracking of Point Features; Technical Report CMU-CS-91-132; Carnegie Mellon University: Pittsburgh, PA, USA, 1991. [Google Scholar]
- Lucas, B.D.; Kanade, T. An iterative image registration technique with an application to stereo vision. In Proceedings of the 7th International Joint Conference on Artificial Intelligence—Volume 2, Vancouver, BC, Canada, 24–28 August 1981; Morgan Kaufmann Publishers Inc.: San Francisco, CA, USA, 1981; pp. 674–679. [Google Scholar]
- Exner, D.; Bruns, E.; Kurz, D.; Grundhofer, A.; Bimber, O. Fast and robust CAMShift tracking. In Proceedings of the 2010 IEEE Computer Society Conference on Computer Vision and Pattern Recognition—Workshops, San Francisco, CA, USA, 13–18 June 2010; pp. 9–16. [Google Scholar]
- Bradski, G.R. Real time face and object tracking as a component of a perceptual user interface. In Proceedings of the Proceedings Fourth IEEE Workshop on Applications of Computer Vision. WACV’98 (Cat. No.98EX201), Princeton, NJ, USA, 19–21 October 1998; pp. 214–219. [Google Scholar]
- Kalal, Z.; Mikolajczyk, K.; Matas, J. Tracking-Learning-Detection. IEEE Trans. Pattern Anal. Mach. Intell. 2012, 34, 1409–1422. [Google Scholar] [CrossRef] [PubMed]
- Henriques, J.F.; Caseiro, R.; Martins, P.; Batista, J. High-speed tracking with kernelized correlation filters. IEEE Trans. Pattern Anal. Mach. Intell. 2015, 37, 583–596. [Google Scholar] [CrossRef] [PubMed]
- Li, H.; Yu, J. Anti-Disturbance Control Based on Cascade ESO and Sliding Mode Control for Gimbal System of Double Gimbal CMG. IEEE Access 2020, 8, 5644–5654. [Google Scholar] [CrossRef]
- Abdo, M.; Vali, A.R.; Toloei, A.; Arvan, M.R. Research on the cross-coupling of a two axes gimbal system with dynamic unbalance. Int. J. Adv. Robot. Syst. 2013, 10, 357. [Google Scholar] [CrossRef]
- Liu, S.; Lu, T.; Shang, T.; Xia, Q. Dynamic Modeling and Coupling Characteristic Analysis of Two-Axis Rate Gyro Seeker. Int. J. Aerosp. Eng. 2018, 2018, 8513684. [Google Scholar] [CrossRef]
- Ding, Z.; Zhao, F.; Lang, Y.; Jiang, Z.; Zhu, J. Anti-Disturbance Neural-Sliding Mode Control for Inertially Stabilized Platform With Actuator Saturation. IEEE Access 2019, 7, 92220–92231. [Google Scholar] [CrossRef]
- Mao, J.; Yang, J.; Liu, X.; Li, S.; Li, Q. Modeling and Robust Continuous TSM Control for an Inertially Stabilized Platform With Couplings. IEEE Trans. Control Syst. Technol. 2020, 28, 2548–2555. [Google Scholar] [CrossRef]
- Kennedy, P.J.; Kennedy, R.L. Direct versus indirect line of sight (LOS) stabilization. IEEE Trans. Control Syst. Technol. 2003, 11, 3–15. [Google Scholar] [CrossRef]
- Hurǎk, Z.; Řezáč, M. Combined line-of-sight inertial stabilization and visual tracking: Application to an airborne camera platform. In Proceedings of the IEEE Conference on Decision and Control, Shanghai, China, 16–18 December 2009; pp. 8458–8463. [Google Scholar]
- Hurák, Z.; Řezáč, M. Image-based pointing and tracking for inertially stabilized airborne camera platform. IEEE Trans. Control Syst. Technol. 2012, 20, 1146–1159. [Google Scholar] [CrossRef]
- Antonello, R.; Oboe, R.; Ramello, A.; Ito, K.; Felicini, N.; Cenedese, A. IMU-aided image stabilization and tracking in a HSM-driven camera positioning unit. In Proceedings of the 2013 IEEE International Symposium on Industrial Electronics, Taipei, Taiwan, 28–31 May 2013; pp. 1–7. [Google Scholar]
- Bibby, C.; Reid, I. Visual tracking at sea. In Proceedings of the IEEE International Conference on Robotics and Automation, Barcelona, Spain, 18–22 April 2005; Volume 2005, pp. 1841–1846. [Google Scholar]
- Liu, X.; Mao, J.; Yang, J.; Li, S.; Yang, K. Robust predictive visual servoing control for an inertially stabilized platform with uncertain kinematics. ISA Trans. 2021. [Google Scholar] [CrossRef]
- Baillieul, J. Encyclopedia of Systems and Control; Baillieul, J., Samad, T., Eds.; Springer: London, UK, 2020; ISBN 978-1-4471-5102-9. [Google Scholar]
- Åström, K.J. Limitations on control system performance. Eur. J. Control 2000, 6, 2–20. [Google Scholar] [CrossRef]
- Zhong, Q.C. Robust Control of Time-Delay Systems; Springer: London, UK, 2006; ISBN 9781846282645. [Google Scholar]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Proposed (Equation (18)) | Image-Based Pointing (Equations (27) and (28)) | Decoupled (Equation (29)) | |
|---|---|---|---|
| Parameters | Controller’s gains , | Controller’s gain | Controller’s gain |
| System model parameters , | |||
| Sampling time | 0.05 [s] | ||
| Video streaming delay time | Average 0.3 [s], worst-case 0.45 [s] | ||
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Huynh, T.; Tran, M.-T.; Lee, D.-H.; Chakir, S.; Kim, Y.-B. A Study on Vision-Based Backstepping Control for a Target Tracking System. Actuators 2021, 10, 105. https://doi.org/10.3390/act10050105
Huynh T, Tran M-T, Lee D-H, Chakir S, Kim Y-B. A Study on Vision-Based Backstepping Control for a Target Tracking System. Actuators. 2021; 10(5):105. https://doi.org/10.3390/act10050105
Chicago/Turabian StyleHuynh, Thinh, Minh-Thien Tran, Dong-Hun Lee, Soumayya Chakir, and Young-Bok Kim. 2021. "A Study on Vision-Based Backstepping Control for a Target Tracking System" Actuators 10, no. 5: 105. https://doi.org/10.3390/act10050105
APA StyleHuynh, T., Tran, M.-T., Lee, D.-H., Chakir, S., & Kim, Y.-B. (2021). A Study on Vision-Based Backstepping Control for a Target Tracking System. Actuators, 10(5), 105. https://doi.org/10.3390/act10050105