2. Lane-Changing Safety Distance
There are some driving parameters in the widely used Gipps car following model [
29], which is difficult to obtain in the actual environment, so the headway safety distance model [
30] is selected. The headway safety distance model is based on the time difference between the adjacent front and rear vehicles passing through the specified point in turn. When the relative speed of the two cars is small, there is an approximately linear relationship between the headway time and the distance of the two cars. Based on this, the following models are established:
where
is the safety distance based on headway,
is the headway time, generally 1.2–2.0 s,
is the rear car speed, and
is the safety margin, generally taken as 2–5 m [
31].
Considering that the speed of the rear car often changes with the speed of the front car under the car-following condition, a safety distance margin is needed. When the braking distance model of the driver for emergency braking is applied to the car-following scenario, we get
where
is the front car speed;
is the braking distance;
is the sum of driver reaction time and brake system coordination time, generally taken as 0.8–1.0 s;
is the growth time of braking deceleration, generally taken as 0.1–0.2 s; and
is the maximum braking deceleration that can be achieved during braking, generally taken as 6–8 m/s
2.
It can be seen that the main influencing factor of the safety distance model based on the headway is the host car speed without considering the relative speed of adjacent vehicles. The braking distance model focuses on the relationship with the relative speed and is not sensitive to the speed of the host car. In order to make up for the shortcomings of the two models and achieve complementary advantages, the fusion safety distance (FSD) can be obtained as follows.:
where
is the fusion of safety distance,
is the weight coefficient of safety distance based on headway, and
is the weight coefficient of braking distance model. When
, the safety margin is used to replace the braking distance model.
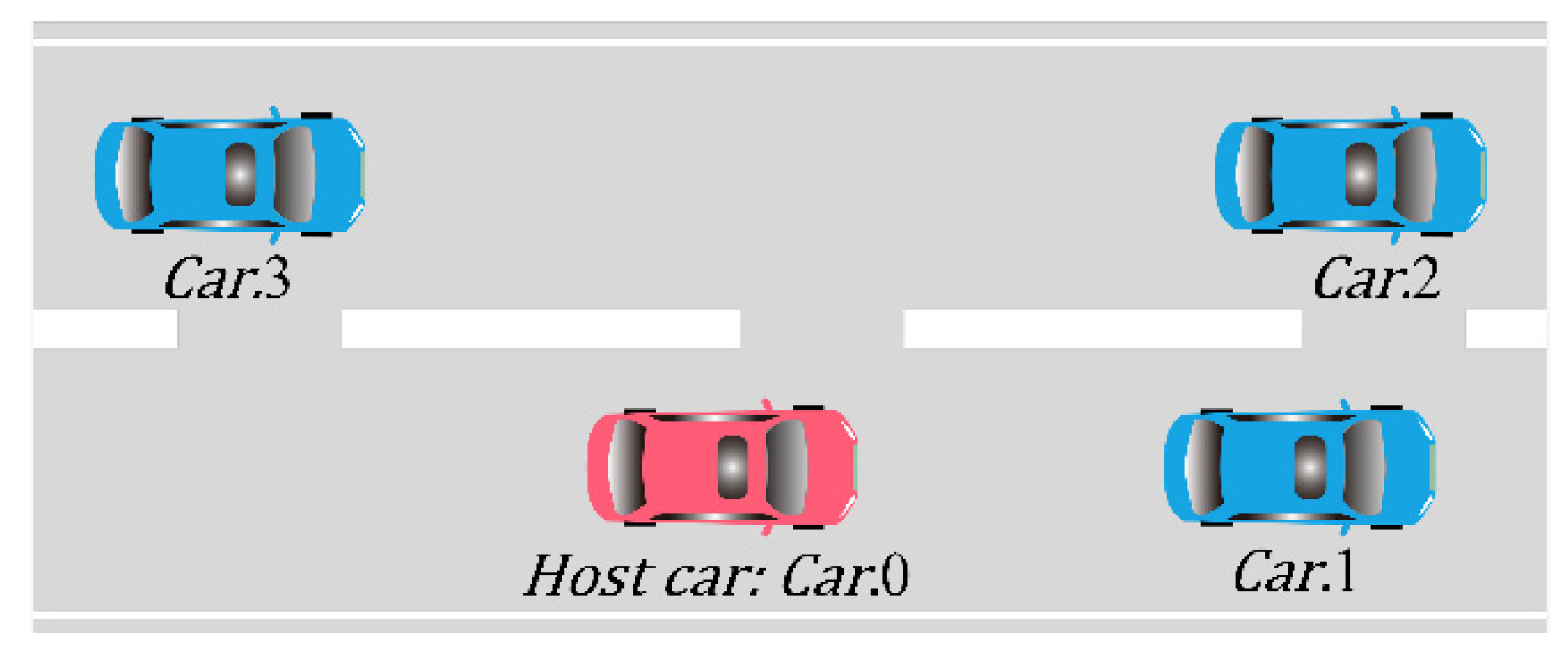
Left lane-changing and right lane-changing often occur in the real driving process, and the steering characteristics of left lane-changing and right lane-changing are similar [
32]. On the basis of the specific left lane-changing scene, the specific analyses of the safety distance between
and other cars are carried out as follows.
Based on (3), analyzing
and
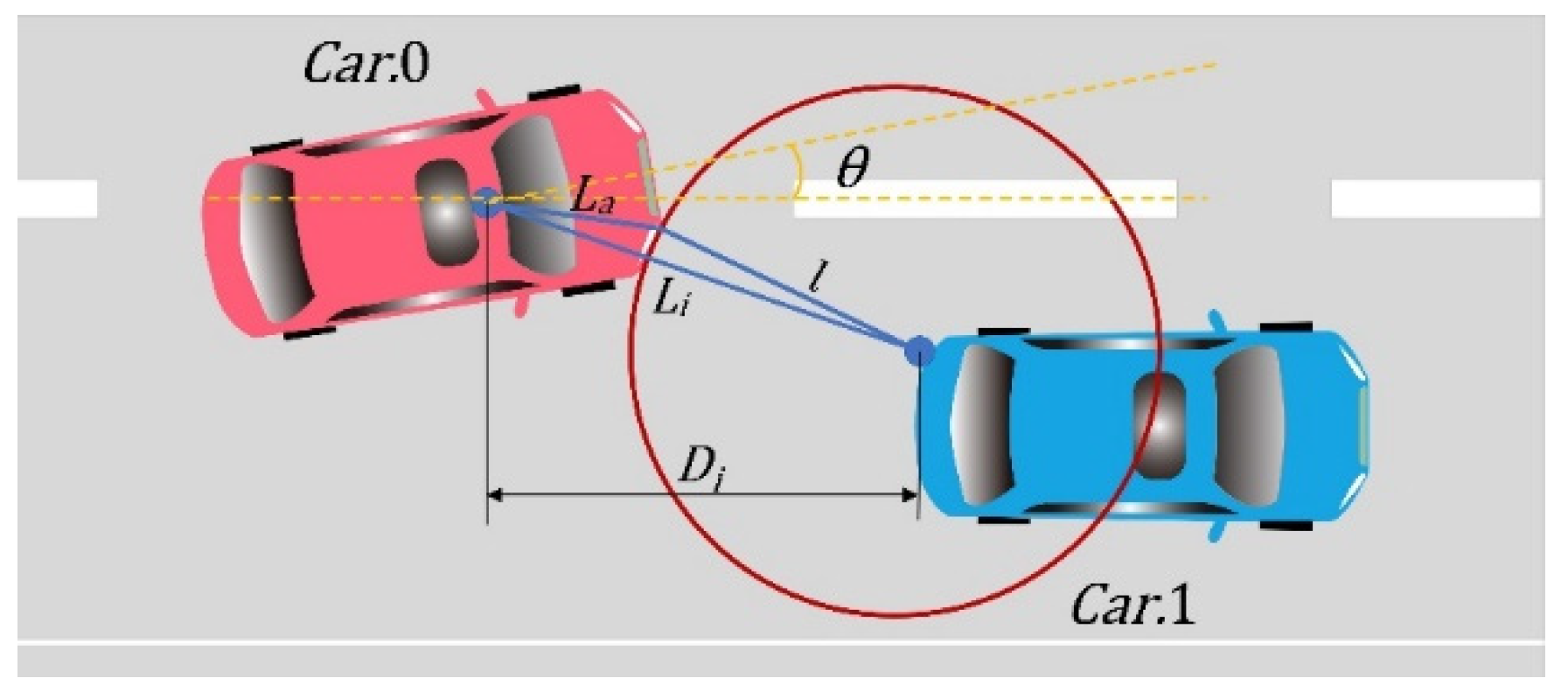
may have a rear-end collision during the lane-changing process. It is necessary to consider the safety distance under emergency braking and lane changing, and the safety distance to avoid the rear-end collision is
where
is the speed of
,
is the speed of
,
is the safety distance between
and
,
is the time for
to change its lanes,
is the length of both car,
is the width of both car, and
is the
’s heading angle when it collides with
. As
is generally near the center line of the lane at this time,
.
The collision between
and
occurs after the beginning of the lane-changing. Therefore, while ensuring the safety distance for the lane-changing, a safe car-following distance should be reserved for
after entering the target lane to avoid subsequent rear-end collisions. According to the analysis of possible collisions based on the FSD, it can be concluded that the safety distance of
to avoid rear-end collision or side scraping with
as shown in (5), where
is the FSD between
and
, and
is the speed of
.
The situation where
collides with
occurs at the end of lane-changing. At this time,
has entered into the target lane, the steering wheel angle is about to return to zero, and the heading angle
of
is very small. Considering the above conditions, based on the FSD, the possible collision with
is analyzed, and the safety distance to avoid the rear-end collision of
can be expressed as (6), where
the safety distance between
and
, and
is the speed of
.
Lane-changing habits of human driver is affected by age, gender, experience, etc. [
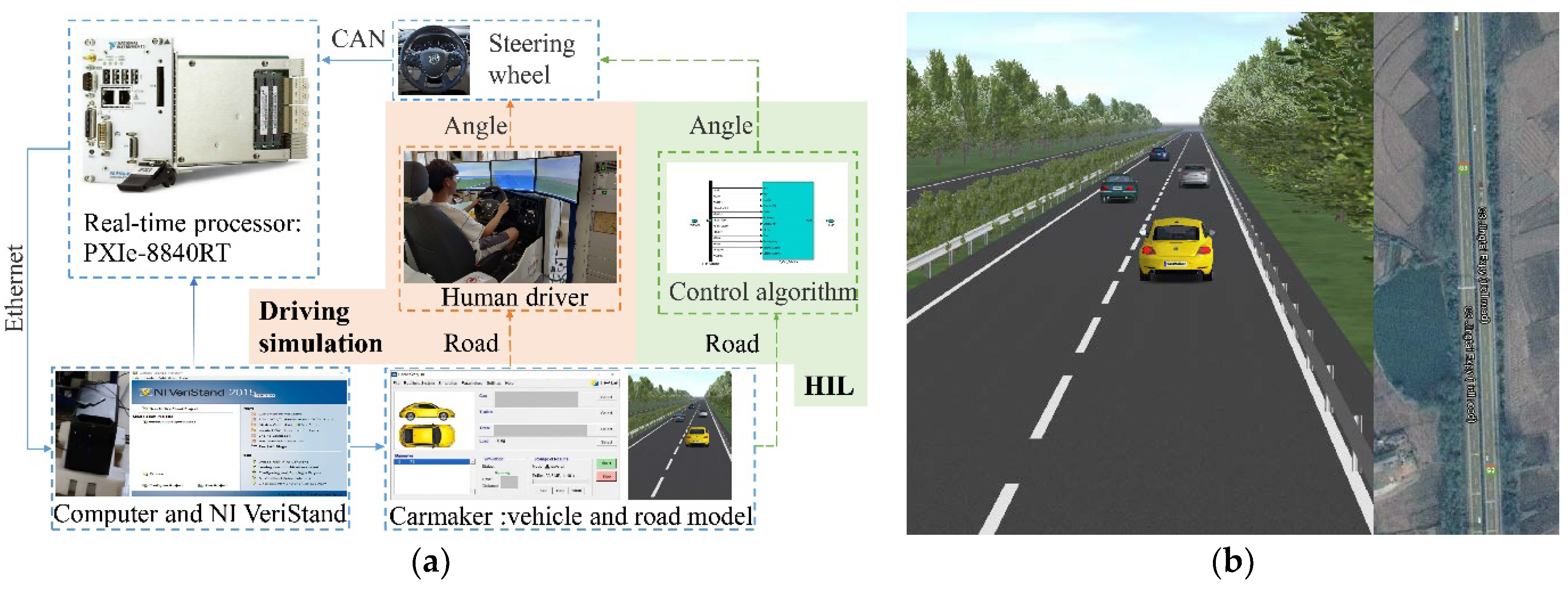
33]. In order to ensure the authenticity of lane-changing related parameters in the model, 83 drivers with different driving experience and ages are specially invited for lane-changing operation on the driving simulator. Due to the difference between the subjective feeling of driving simulator and real vehicle, each driver is given a period of operation training.
After completing the training, 83 drivers changed the lanes left and right for a total of 672 times. The final results are shown in
Table 1, where
is the average lane-changing time,
is the standard deviation corresponding to
,
is the average maximum heading angle, and
is the standard deviation corresponding to the
. The last column in
Table 1 is the total number of left and right lane-changing, and
,
,
,
, corresponding to the total lane-changing number. From
Table 1, it can be concluded that the average value of the maximum heading angle is 3.20°, which indicates that the assumption that the maximum heading angle appears during lane-changing process is reasonable, and the average lane-changing time of 5.17 s is close to the 5.48 s [
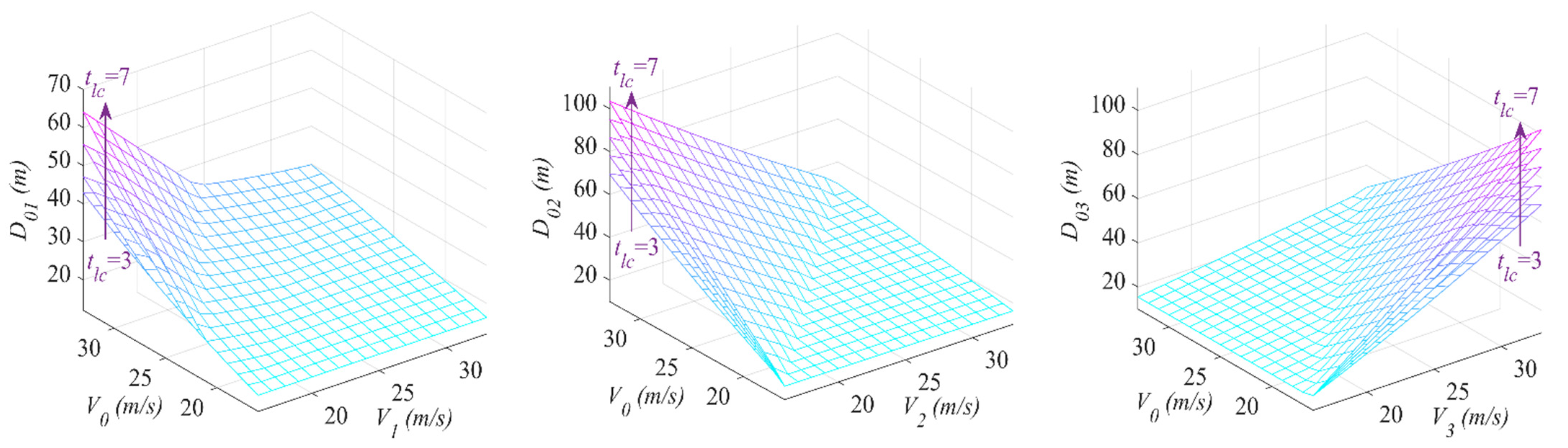
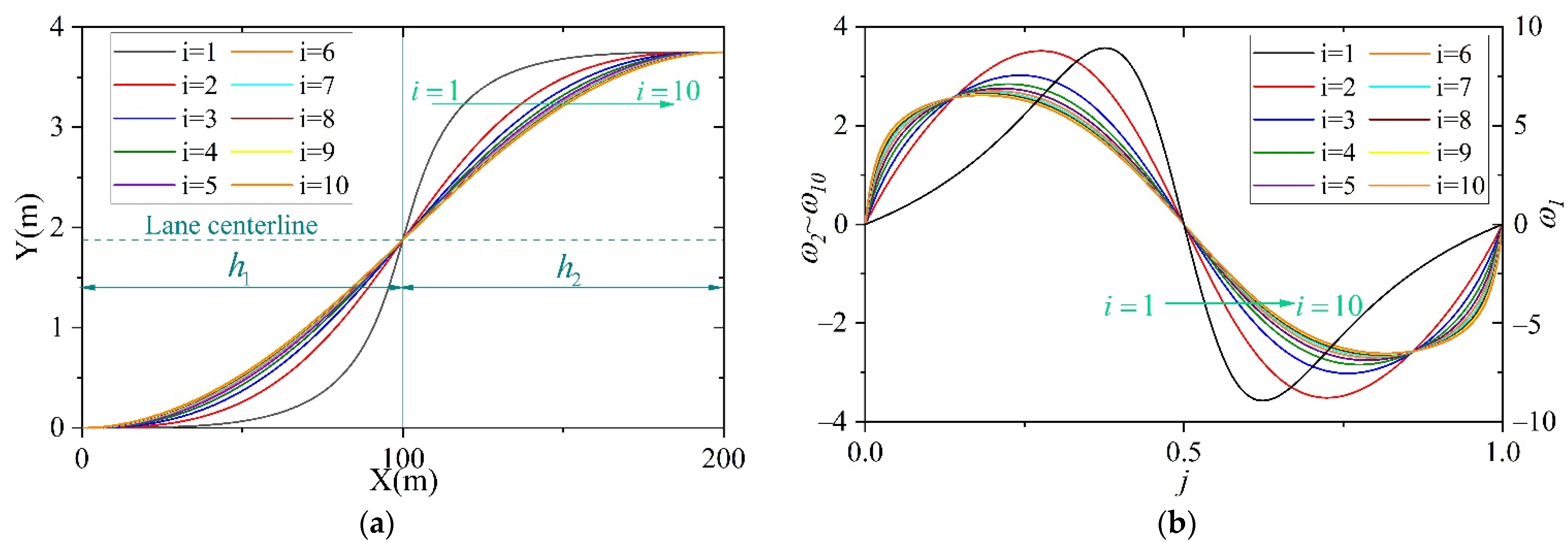
34]. The standard deviation corresponding to the lane-changing time and the maximum heading angle are small, which implies that the data are concentrated. According to the statistics of this lane-changing simulation data, 86.41% of the lane-changing time are in the interval (3.7, 6.3), so the change range of
is taken as an integer of (3, 7), and the speed change range is set to 16~33 m/s. The changing rule of the lane-changing safety distance with
is shown in
Figure 2.
Through
Figure 2, it can be found out that the greater the expected lane-changing time
, the greater the lane-changing safety distance will be. Combining the data in
Table 1,
= 5.17 s is used to determine the lane-changing safety distance. The relevant parameters in the lane-changing safety distance model have been determined shown in
Table 2.
3. Lane-Changing Decision-Making Based on Single-Step Dynamic Game with Incomplete Information
If
refuses the lane-changing behavior of
, it may cause a rear-end collision or side scraping. If
accepts the lane-changing behavior of
,
will slow down and avoid
. Therefore, there is a strong interaction between
and
in lane-changing scenarios. Game theory is a powerful tool to study the interaction between decision-makers [
11]. The relationship between two cars can be regarded as players playing lane-changing games. Game behavior can be defined as a definite mathematical object which mainly includes three essential elements: player, strategy, and payoff [
35]. First of all, in the process of driving, the strategies of both players will be adjusted according to the change of traffic environment, and the result of the game is determined once, so the game type between players belongs to single-step dynamic game. Second, assuming the relative distance and speed of the surrounding vehicles can be obtained by radar, but for vehicles without V2V communication function, only the controlled vehicle (
) can obtain the payoff function of both players in the game, that is, the information obtained by both players in the game is not complete. Finally, a single-step dynamic game with incomplete information is selected to model the game relationship between
and
in the lane-changing scene.
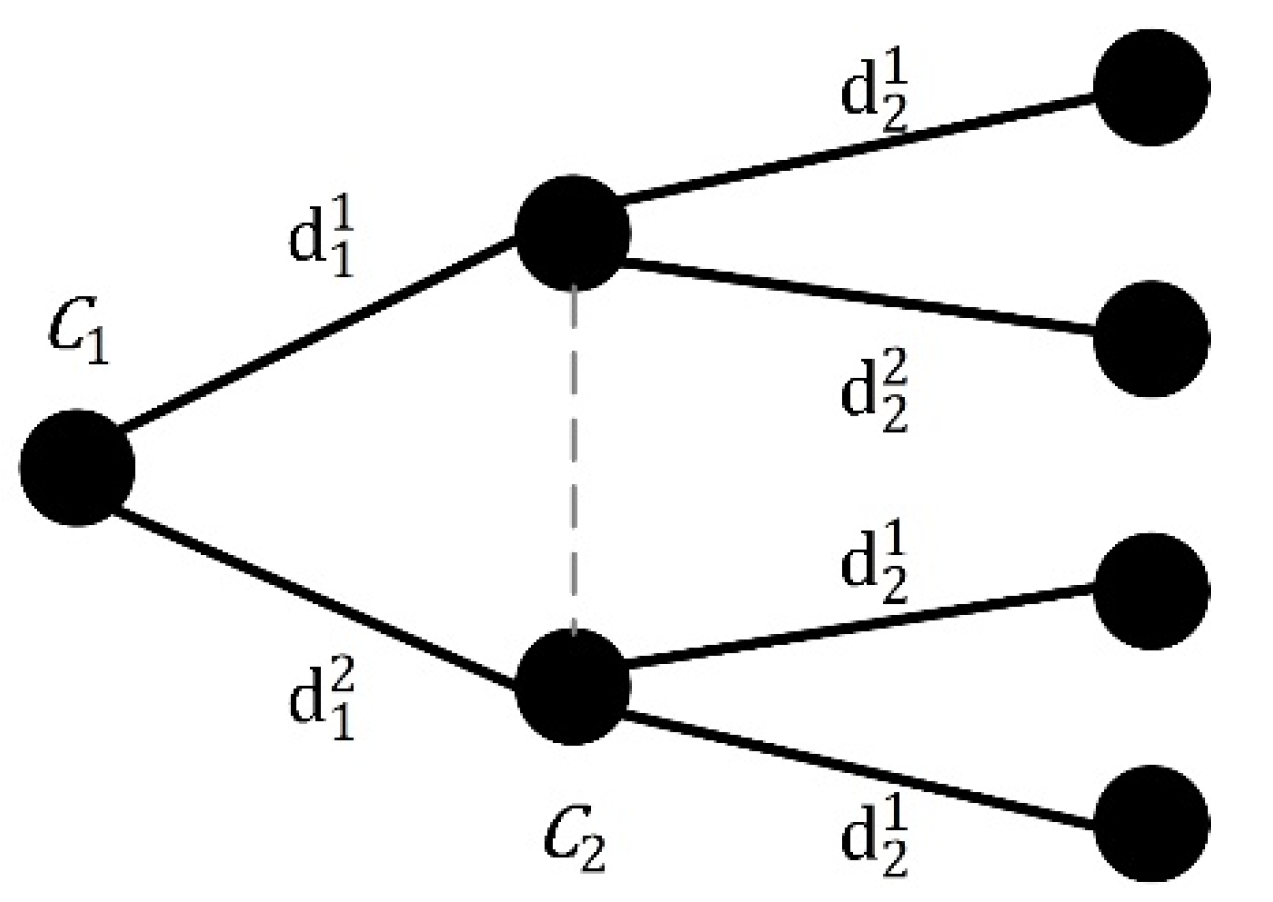
As shown in
Figure 3,
is the player, and
is the corresponding strategy. When two players play a single-step dynamic game, the dotted line connects the two possible behaviors of
which means that
does not know what decision
will make. This game is equivalent to
and
making a lane-changing decision at the same time, so that the extended game problem under incomplete information can be transformed into a static game problem for solution [
36]. The pure strategies produced by this game can be written as shown in
Table 3.
In
Table 3,
is lane-changing payoff of
,
is lane keeping payoff of
,
is the payoff of
when
accepts
’s lane-changing, and
is the payoff of
when
refuses
to change its lane.
3.1. Safety Payoff
Taking
as the safety payoff, the safety payoff function can be described as
where
, 0 is corresponding to
, and 3 is corresponding to
;
, 1 means lane-changing or accepting lane-changing, 2 means lane keeping or refusing lane-changing;
, 02 represents the relationship between
and
, 01 represents the relationship between
and
, 03 represents the relationship between
and
, and 23 represents the relationship between
and
; The numbers in
, and
play the role of codes,
is the distance between vehicles, and
is the lane-changing safety distance.
It can be seen that when , the safety payoff will directly reach , prompting to change its lane immediately. Similarly, when is close to , the payoff of will directly reach when it agrees changes the lane. When is close to , the lane-changing behavior of will not be carried out. If is close to , will change its lane immediately. Assuming that the speed of all vehicles is constant, when the above two situations occur at the same time, the collision loss caused by lane-changing or not is judged by combining other payoff functions.
3.2. Velocity Payoff
For both players of the game, the vehicle’s current speed of the player is set as the threshold that the player can continue to obtain, and the speed difference between the front vehicle and the player’s own vehicle is the payoff variable. According to this setting, the velocity payoff
can be described as follows.
When there is a stationary car ahead or vehicle is detected currently on the ramp and needs to change its lane, the velocity payoff reaches the minimum value of −1. When the target speed is equal to the current speed, the velocity payoff is 0. Because the speed of each car on the road is basically within the speed limit range when driving at high speed, the velocity gain reaches 1 when the target speed is twice the current speed.
The significance of the velocity payoff setting is that when the speed of is greater than the current speed or the expected speed of , does not need to change its lanes. When the speed of is less than the current speed or the expected speed of , the speed of will be compared with the speed of . If the speed of can better meet the velocity payoff of , the lane-changing demand will be generated. That is to say, the earlier the lane-changing is completed, the better the vehicle power performance will be.
3.3. Comfort Payoff
When the speed of the preceding car is lower than the speed of the host car, the host car choosing to brake or change its lane to avoid the collision is needed. However, when the relative speed difference is large, the small lane-changing time is needed, the short lane-changing time will cause large lateral acceleration. Which is bad to the comfort of passengers. Therefore, connecting the lane changing time obtained from (14) and the comfort payoff. The comfort payoff
is
where
is half of the total lane-changing time shown in (14). The big speed difference between the preceding car and the host car will cause a small
, and the time reserved for the driver to change the lanes is also very short. That is, the big lateral acceleration will be generated during lane-changing, leading to the worse comfort of passengers. The changing trend of
is shown in
Figure 4. It is indicated that when
is more than 2.5 s, the change of
is relatively gentle, while when
is less than 2.5 s, the comfort payoff decreases sharply, which is consistent with the collected average lane-changing time of human drivers. The change trend of
meets the influence rule of lane-changing time on lateral comfort.
3.4. Total Payoff and Game Solution
The total payoff is a linear combination of safety payoff, velocity payoff, and comfort payoff.
,
, and
in (10) are the weights of corresponding payoff.
Excessive consideration of safety will reduce the lane-changing possibility, leading to system conservativeness increased. On the contrary, weakening the consideration of safety will increase the risk of collision [
37]. This paper takes
,
, and
.
The game model has at least one equilibrium point, which can be calculated by the change in the payoff function while driving. The problem of solving the equilibrium point is transformed into a problem of extreme points for solving, as in (11).
where
and
are the decisions of
and
, respectively;
and
are the strategy sets of the two cars;
is the decision set of
after the decision of
;
is the decision under the decision set; and
,
are the final decisions of the two vehicles.
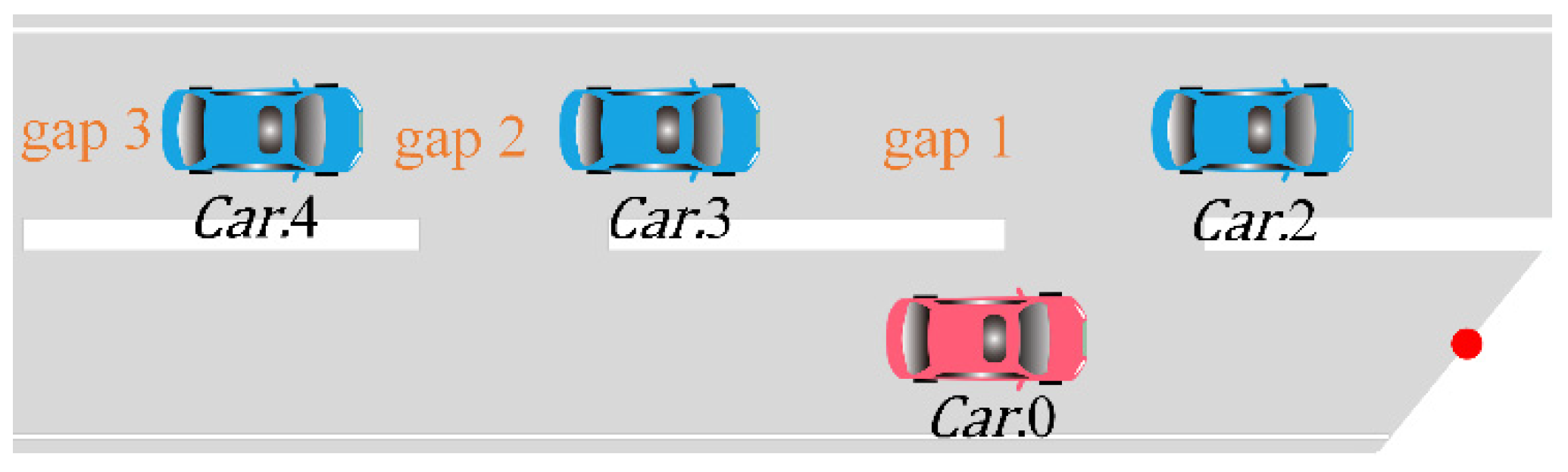
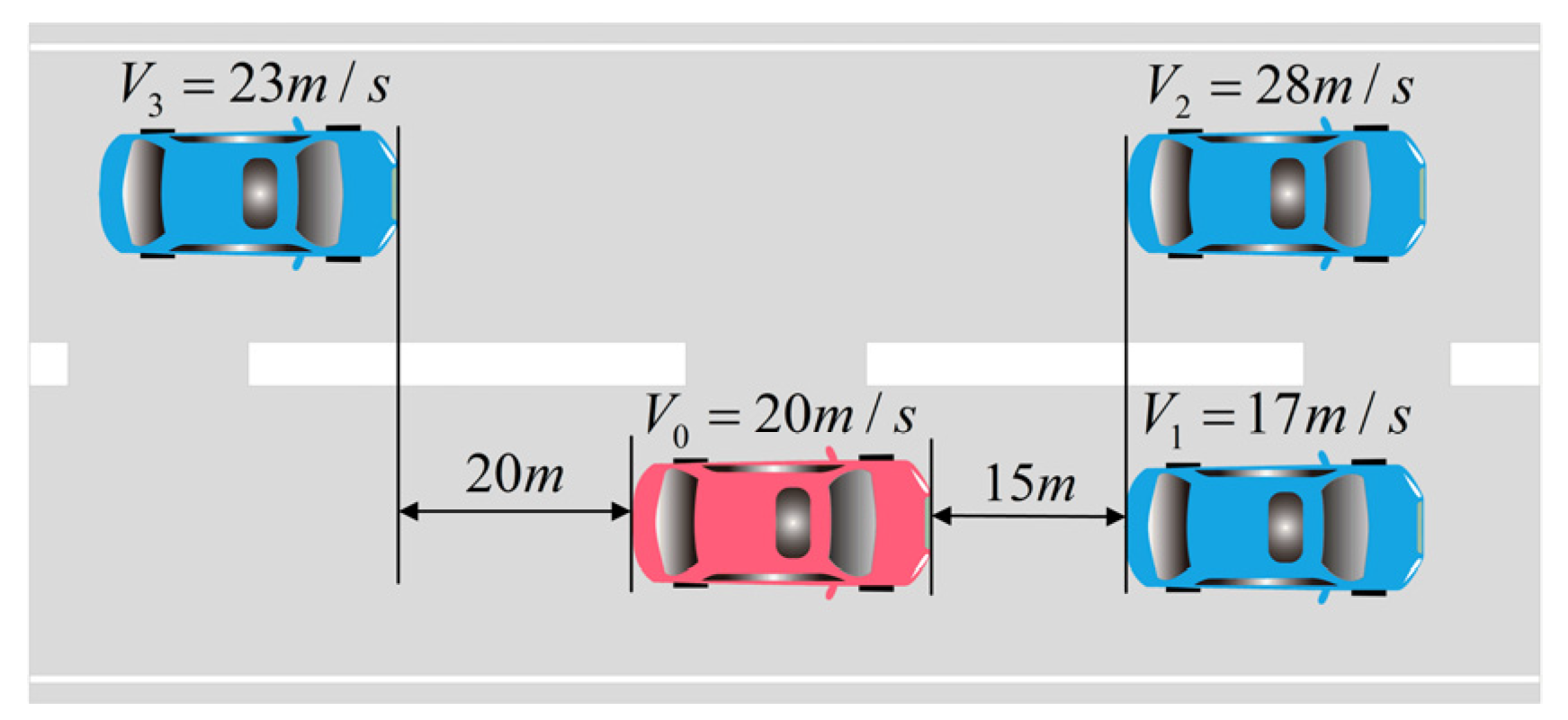
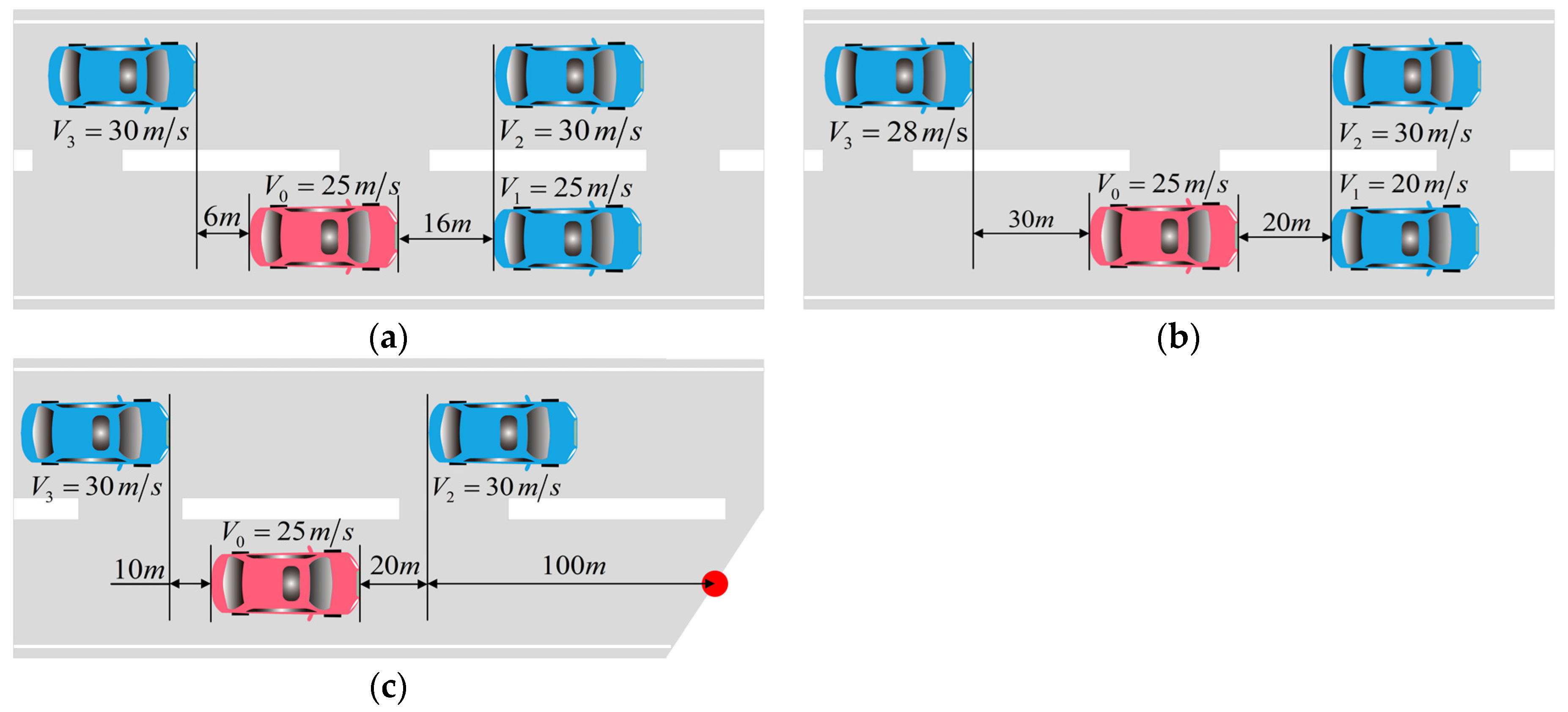
In order to verify the effectiveness of the proposed game method, the MLC scenario shown in
Figure 5 designed in [
11] is used for the simulation verification. Suppose the decision-making method used in that paper is
, and the decision-making method used in this paper is
. The comparison results are shown in
Table 4. It can be seen from the
Table 4 that the method of
and
adopt the same lane-changing cut-in position in the two scenarios of Test 1 and Test 2. In Test 3, the distance between
and
is only 10 m. At this time,
still choosing to insert gap 2 will have a greater impact on the velocity payoff of
, and it may even cause rear-end collision. Therefore, the proposed method chooses to change the lane immediately when
overtakes
. The price of delaying the lane-changing operation is to produce greater lateral acceleration, that is, to ensure driving safety by sacrificing part of the comfort. It is indicated that the proposed game lane-changing decision is effective.
6. Discussion
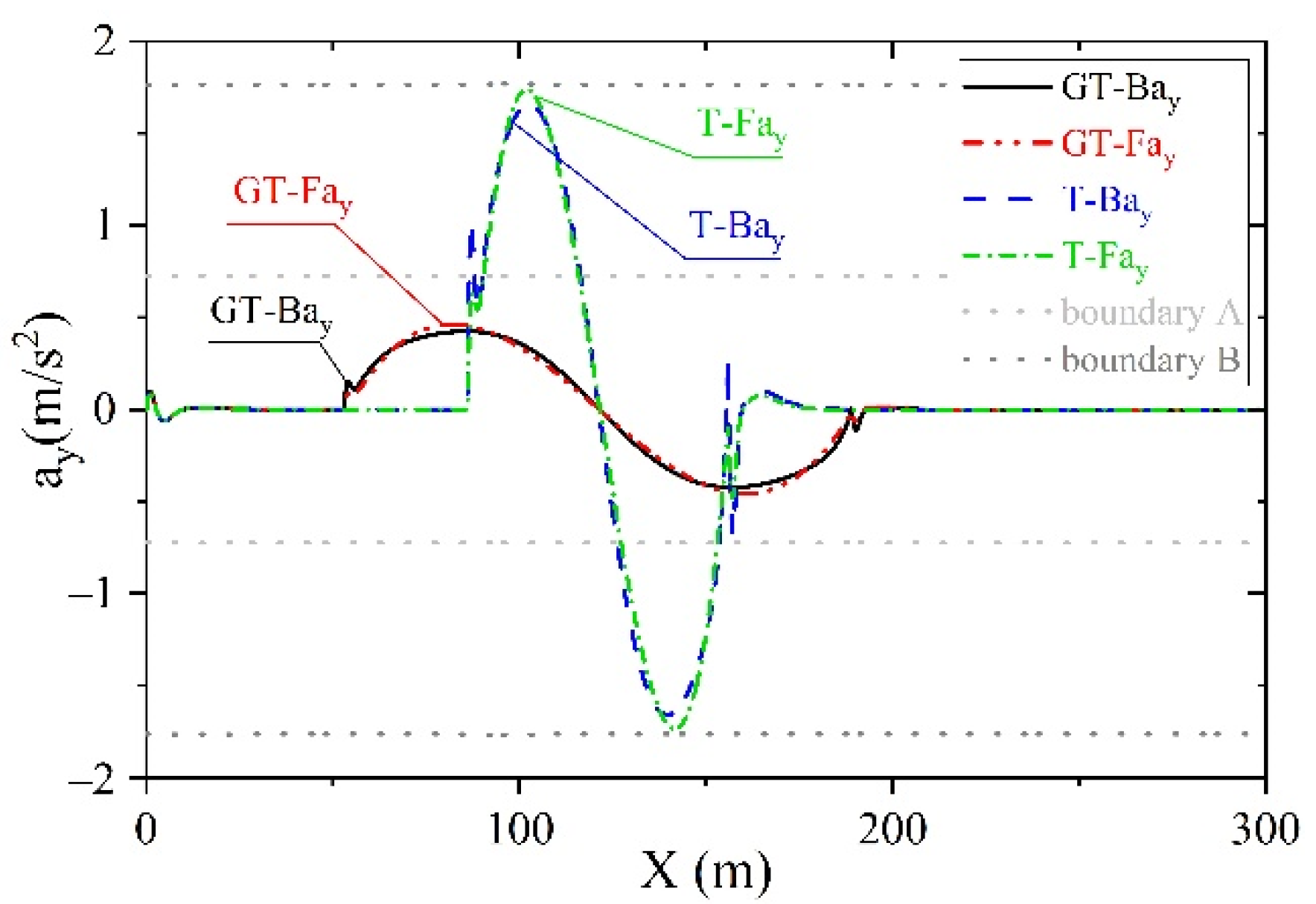
Comparing the analysis of lane-changing process under the control of GT-B with that of human drivers, it is obvious that vehicle safety, power performance, and human comfort can be coordinated well by the GT-B method. In the common traffic situation (Case I), part of vehicle power performance is sacrificed to guarantee driving safety, and the lane-changing time is appropriately extended to obtain good human comfort. In emergency situation (Case II), the vehicle’s performance is improved while guaranteeing its safety. In a very emergency situation (Case III), part of the power performance and human comfort are both sacrificed to make driving safety guaranteed. Moreover, vehicle performance by GT-B method is superior to that by human drivers in lane-changing path planning and vehicle lateral control. From the experiment results, it can be seen that GT-B method can balance the payoffs generated by lane-changing, and obtain more rapid, smoother, and safer lane-changing.
In order to simplify the lane-changing model, this paper makes some reasonable assumptions, such as the speed changing in a small range and only considering lane-changing in straight road. However, there are two conditions that may be needed to be noticed: (I) When the surrounding vehicles decelerate or accelerate suddenly, the lane-changing decision and the longitudinal motion of the host car will be affected. (II) Although lane-changing in a curved road is not recommended, it is still necessary to design an automatic lane-changing system that is safe for curved roads. When the vehicle is driving in the curved road to avoid the obstacle, the appropriate decision results are very important to ensure the vehicle and passengers’ safety. In the follow-up related research, the decision-making and path planning method will be studied and optimized based on the lane-changing in the curved road and consider longitudinal acceleration of each car in the traffic flow. Herrmann et al. [
43] optimized the velocity on the available paths for the racing cars, which inspired velocity planning of host car in future study. The difference is that the racing cars need to fully utilize the maximum possible tire forces, whereas the passenger cars need to consider the impact of speed planning on ride comfort.
At present, the system is in the principle verification stage, so the vehicle distance signal obtained in the simulation is accurate value, however any distance measurement method has the error and noise. Vehicle state variables also need to be acquired through sensors, and sensor signals are bound to have delays and noises. If the system designed in this paper is to be applied to the actual vehicle in the future, it is necessary to study the sensor signal fusion technology and the vehicle state parameter estimation system. Although it is difficult to apply this method in the actual driving scene at present, the experimental data presented in this paper would promote the development of autonomous lane-changing systems and the further research based on this paper will help to reduce the number of traffic accidents caused by lane-changing.
7. Conclusions
A game of lane-changing decision-making with Bézier curve path planning is proposed in this paper which considers driving safety, power performance, and passenger comfort comprehensively. Lane-changing safety distance is obtained by using 83 driver lane-changing data. The lane-changing safety distance and lane-changing time calculated by the path planning layer are considered in game payoff to enhance safety considerations, which realizes the strong coupling between path planning layer and decision layer. The results of the planning layer are returned to the decision layer as the input, which can improve the security of the decision results. In addition, a detailed constrained optimization method is proposed for Bézier curves, which improves the safety, traceability, and comfort of the planned path. In the MIL simulation, it is proved that the method proposed in this paper greatly improves the vehicle safety and passenger comfort. The HIL experimental results indicate that the method proposed in this paper is superior to human drivers in the selection of lane change time, the control of vehicle interval, and can achieve the balance among vehicle safety, power performance and passenger comfort. In the HIL verification, there are not many driving scenarios, but the three lane-changing scenarios are representative that can be used for comparative tests.
It is obvious that the method proposed in this paper can meet the requirements well in the decision-making of lane-changing starting time, the total lane-changing time, the lane-changing planning path, and the tracking control of planned path in both scenarios of DLC and MLC. The results of this paper will accumulate experience for the further research.



















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}