
Effect of Wearing Running Shoes on Lower Limb Kinematics by Using OpenSim Simulation Software



Abstract
:1. Introduction
1.1. Characteristics of Flatfoot
- Flatfoot promotes excessive pronation and reduced stress absorption;
- When a typical foot comes into contact with the ground, it is subjected to a pressure of 1.5-times the body weight, but those with flat feet experience higher tiredness due to a lack of shock absorption;
- Obesity can also cause irregular foot mobility by increasing the stress on the feet during the stance phase.
1.2. Current State-of-the-Art
2. Materials and Methods
2.1. Participants
2.2. Instrumentation
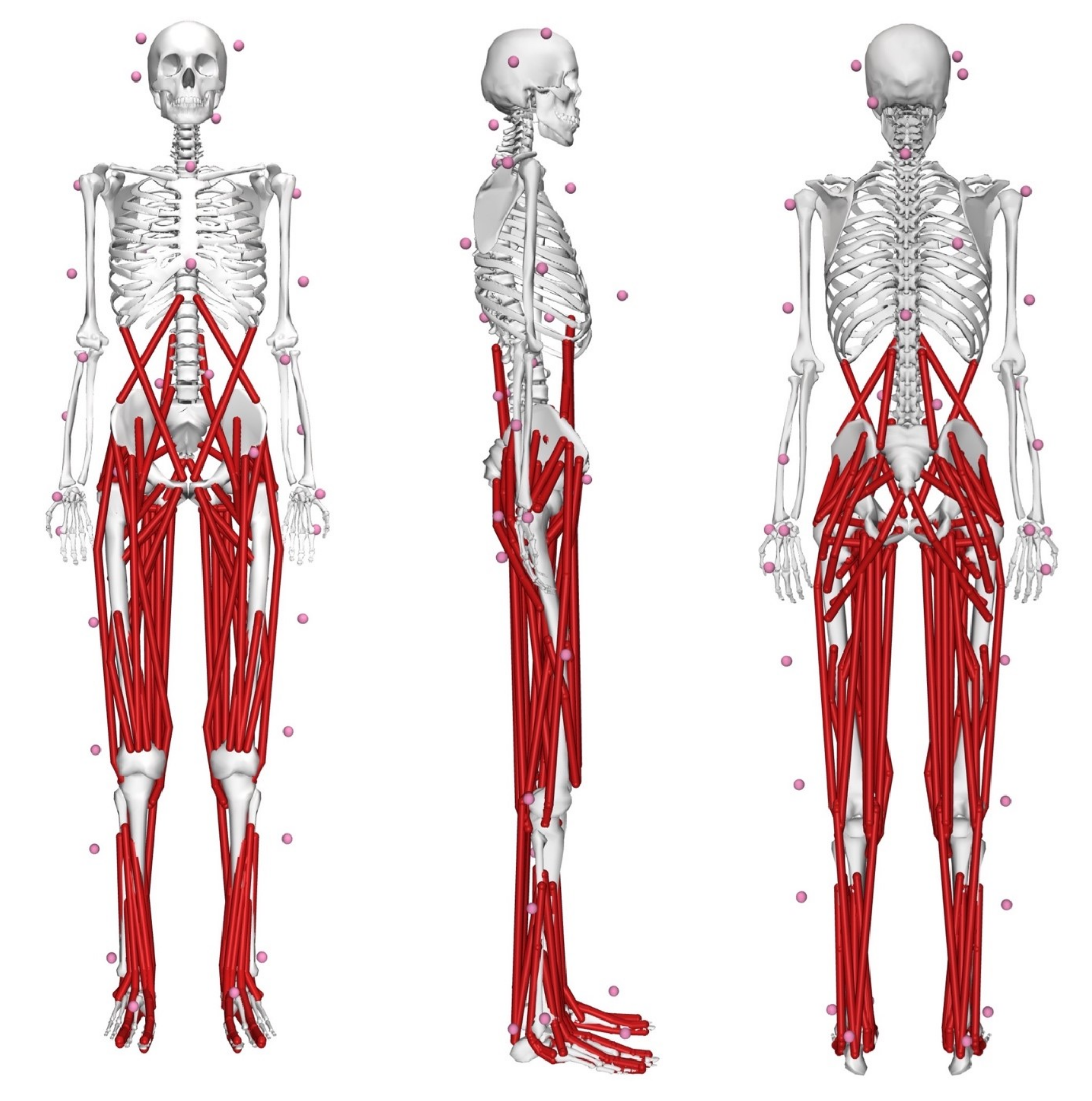
2.3. Musculoskeletal Modeling
2.4. Data Analysis
2.5. Statistics
3. Results
3.1. Kinematic Analysis
3.2. COM Displacement and Velocity Results
4. Discussion
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Abbreviations
| EMG | Electromyography |
| COM | Center of mass |
| ROM | Range of motion |
| DOF | Degree of freedom |
| IK | Inverse kinematics |
References
- Delp, S.L.; Anderson, F.C.; Arnold, A.S.; Loan, P.; Habib, A.; John, C.T.; Guendelman, E.; Thelen, D.G. OpenSim: Open-source software to create and analyze dynamic simulations of movement. IEEE Trans. Biomed. Eng. 2007, 54, 1940–1950. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Lee, C.R.; Kim, M.K. The effects on muscle activation of flatfoot during gait according to the velocity on an ascending slope. J. Phys. Ther. Sci. 2014, 26, 675–677. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Prachgosin, T.; Chong, D.Y.; Leelasamran, W.; Smithmaitrie, P.; Chatpun, S. Medial longitudinal arch biomechanics evaluation during gait in subjects with flexible flatfoot. Acta Bioeng. Biomech. 2015, 17, 121–130. [Google Scholar] [PubMed]
- Marouvo, J.; Sousa, F.; Fernandes, O.; Castro, M.A.; Paszkiel, S. Gait Kinematics Analysis of Flatfoot Adults. Appl. Sci. 2021, 11, 7077. [Google Scholar] [CrossRef]
- Chen, Y.; Su, F.; Huang, C. Effects of the shoes and insoles on gait patterns in the flatfoot. J. Biomech. 2007, 40, S472. [Google Scholar] [CrossRef]
- Kim, M.K.; Lee, Y.S. Kinematic analysis of the lower extremities of subjects with flat feet at different gait speeds. J. Phys. Ther. Sci. 2013, 25, 531–533. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Rajagopal, A.; Dembia, C.L.; DeMers, M.S.; Delp, D.D.; Hicks, J.L.; Delp, S.L. Full-body musculoskeletal model for muscle-driven simulation of human gait. IEEE Trans. Biomed. Eng. 2016, 63, 2068–2079. [Google Scholar] [CrossRef] [PubMed]
- Barnamehei, H.; Zhou, Y.; Zhang, X.; Vasavada, A. Cervical spine intervertebral kinematics estimated from inverse kinematics and compared to dynamic X-ray data. Gait Posture 2020, 81, 36–37. [Google Scholar] [CrossRef]
- Barnamehei, H.; Ghomsheh, F.T.; Cherati, A.S.; Pouladian, M. Kinematic models evaluation of shoulder complex during the badminton overhead forehand smash task in various speed. Inform. Med. Unlocked 2021, 26, 100697. [Google Scholar] [CrossRef]
- Barnamehei, H.; Ghomsheh, F.T.; Cherati, A.S.; Pouladian, M.; Aminishahsavarani, A.; Golfeshan, N. Shoulder Kinematics and Kinetics Comparison Between Amateur and Professional Athletics During High-Speed Overhead Tasks: Computer Simulation Study. In International Conference on NeuroRehabilitation; Springer: Vigo, Spain, 2020; pp. 71–75. [Google Scholar]
- Lu, T.W.; O’connor, J. Bone position estimation from skin marker co-ordinates using global optimisation with joint constraints. J. Biomech. 1999, 32, 129–134. [Google Scholar] [CrossRef]
- Barnamehei, H.; Kharazi, M.; Barnamehei, M. Heel Height Affects Lower Extremity Joint Moments during Walking with OpenSim Software. 2017. Available online: https://www.researchgate.net/profile/Hamidreza-Barnamehei/publication/318592221_P83_Heel_height_affects_lower_extremity_joint_moments_during_walking_with_OpenSim_software/links/5b4ba88b45851519b4c01f3b/P83-Heel-height-affects-lower-extremity-joint-moments-during-walking-with-OpenSim-software.pdf (accessed on 15 March 2020).
- Barnamehei, H.; Ghomsheh, F.T.; Cherati, A.S.; Pouladian, M. Muscle and joint force dependence of scaling and skill level of athletes in high-speed overhead task: Musculoskeletal simulation study. Inform. Med. Unlocked 2020, 20, 100415. [Google Scholar] [CrossRef]
- Bagheri, F.; Barnamehei, H.; Kharazi, M.; Panahi, A.; Golfeshan, N.; Razaghi, M.; Rostami, M.; Barnamehei, M.; Naghavi, N.; Jafarloo, S.A. Comparison of biarticular muscles effects on balance variation between bare-foot and wearing high-heel shoe conditions: Experimental and simulation by OpenSim. Gait Posture 2020, 81, 20–21. [Google Scholar] [CrossRef]
- Barnamehei, H.; Karimidastjerdi, M.; Torabigoudarzi, M.; Kharazi, M.; Barnamehei, M.; Golfeshan, N.; Naghavi, N.; Jafarloo, S.A.; Ghorbani, M. Simulation of flatfoot gait with and without running shoes by evaluation of hip kinematics and balance control variations via OpenSim. Gait Posture 2020, 81, 32–33. [Google Scholar] [CrossRef]
- Chou, L.S.; Kaufman, K.R.; Hahn, M.E.; Brey, R.H. Medio-lateral motion of the center of mass during obstacle crossing distinguishes elderly individuals with imbalance. Gait Posture 2003, 18, 125–133. [Google Scholar] [CrossRef]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Without Shoe COM | With Shoe COM | |||||
|---|---|---|---|---|---|---|
| COMx | COMy | COMz | COMx | COMy | COMz | |
| Mean | 0.0117942 | −0.00234 | −0.00924 | 0.0051975 | −0.002879 | −0.009582 |
| Stddev * | −0.005516 | −0.000559 | −5.33 | −0.005516 | −0.000559 | −5.33 |
| Without Shoe COM | With Shoe COM | |||||
|---|---|---|---|---|---|---|
| COMx | COMy | COMz | COMx | COMy | COMz | |
| Mean | 0.8181375 | 0.0202329 | 0.0030689 | 0.8754778 | −0.004599 | 0.0037519 |
| Stddev * | 0.0933534 | 0.0978307 | 0.0157523 | 0.0933534 | 0.0978307 | 0.0157523 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Renganathan, G.; Barnamehei, H.; Das, S.; Kurita, Y. Effect of Wearing Running Shoes on Lower Limb Kinematics by Using OpenSim Simulation Software. Actuators 2022, 11, 152. https://doi.org/10.3390/act11060152
Renganathan G, Barnamehei H, Das S, Kurita Y. Effect of Wearing Running Shoes on Lower Limb Kinematics by Using OpenSim Simulation Software. Actuators. 2022; 11(6):152. https://doi.org/10.3390/act11060152
Chicago/Turabian StyleRenganathan, Gunarajulu, Hamidreza Barnamehei, Swagata Das, and Yuichi Kurita. 2022. "Effect of Wearing Running Shoes on Lower Limb Kinematics by Using OpenSim Simulation Software" Actuators 11, no. 6: 152. https://doi.org/10.3390/act11060152