
Admissible Control for Non-Linear Singular Systems Subject to Time-Varying Delay and Actuator Saturation: An Interval Type-2 Fuzzy Approach
 ,
,  ,
,  ,
,  and
and 
Abstract
:1. Introduction
1.1. Literature Review
1.2. Objective and Outline
- (i)
- Instead of existing control schemes developed for type-1 fuzzy singular systems with delay and actuator saturation [40], this study explored state feedback controllers based on IT-2 fuzzy rules in order to handle uncertain non-linear singular systems.
- (ii)
- The delay property and actuator saturation for the IT-2 fuzzy singular system under consideration were simultaneously considered in this study. Moreover, compared with the results suggested in [36,41], a more realistic problem was investigated in this paper that cannot be solved by the methods in the previous references.
- (iii)
- A new Lyapunov–Krasovskii functional candidate was constructed, and the delay-range-dependent approach was adopted to derive an admissibilization criterion via LMI formulation. Furthermore, the domain of attraction of the origin can be estimated for the underlying system.
1.3. Notations
2. Preliminaries and Problem Statement
2.1. IT-2 TS Fuzzy Model
2.2. Assumptions and Resulting Model
- A1
- is a continuous function such thatwhere represents the lower delay bound, stands for the upper delay bound, and is the delay variation rate.
- A2
- Singular matrix satisfies .
- A3
- is the saturation that affects the actuator according to the following model:where is the value of , and is the saturated level, .
2.3. IT-2 Fuzzy State Feedback Controller Design
- For a positive scalar ρ, an ellipsoid set is defined aswhere defines a positive definite matrix.
- For a given matrix , a polyhedral set is given bywhere represents the lth row of , and is a positive given scalar.
2.4. Problem Statement
3. Main Results
3.1. Admissibility Analysis
3.2. Fuzzy Controller Design
4. Numerical Applications
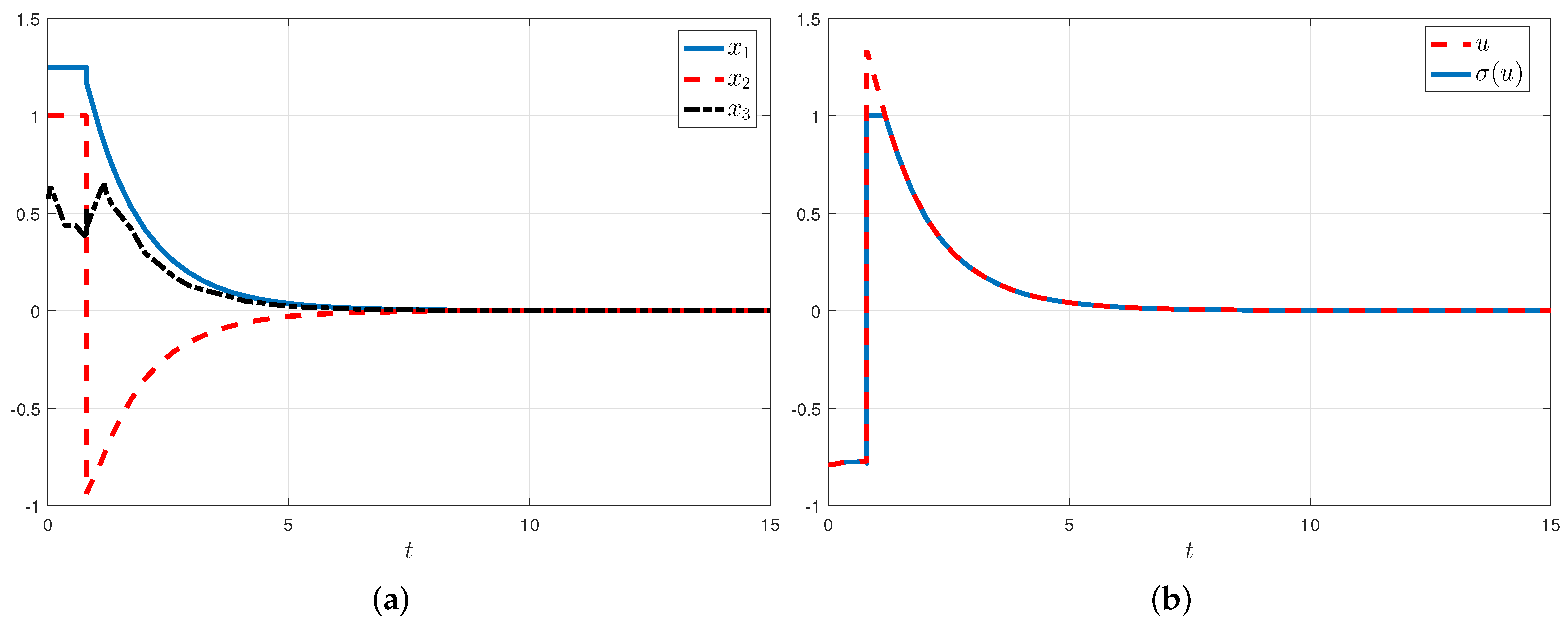
4.1. Mass-Spring-Damper System
4.2. Inverted Pendulum System
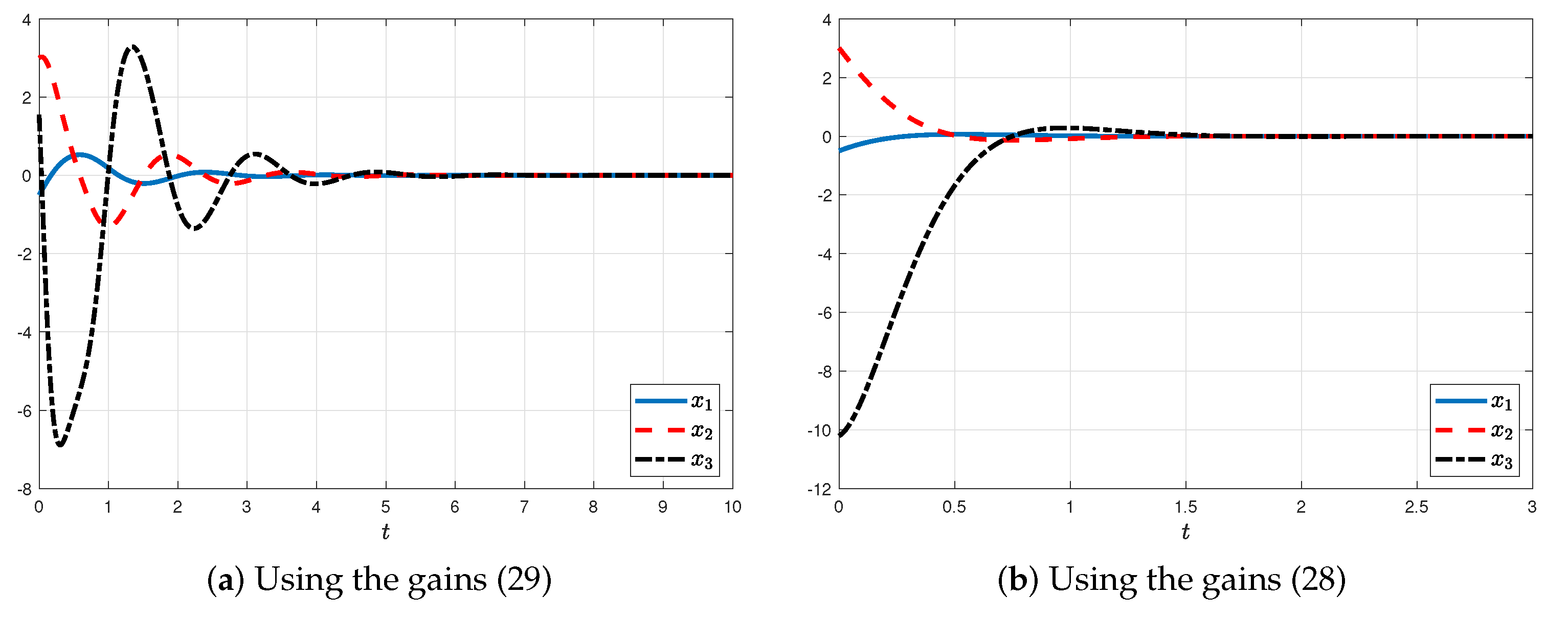
- Case 1:
- Delay does not affect system. Here, we set , and both controllers are applied to the system under . The evolution of the state signals is plotted in Figure 3.
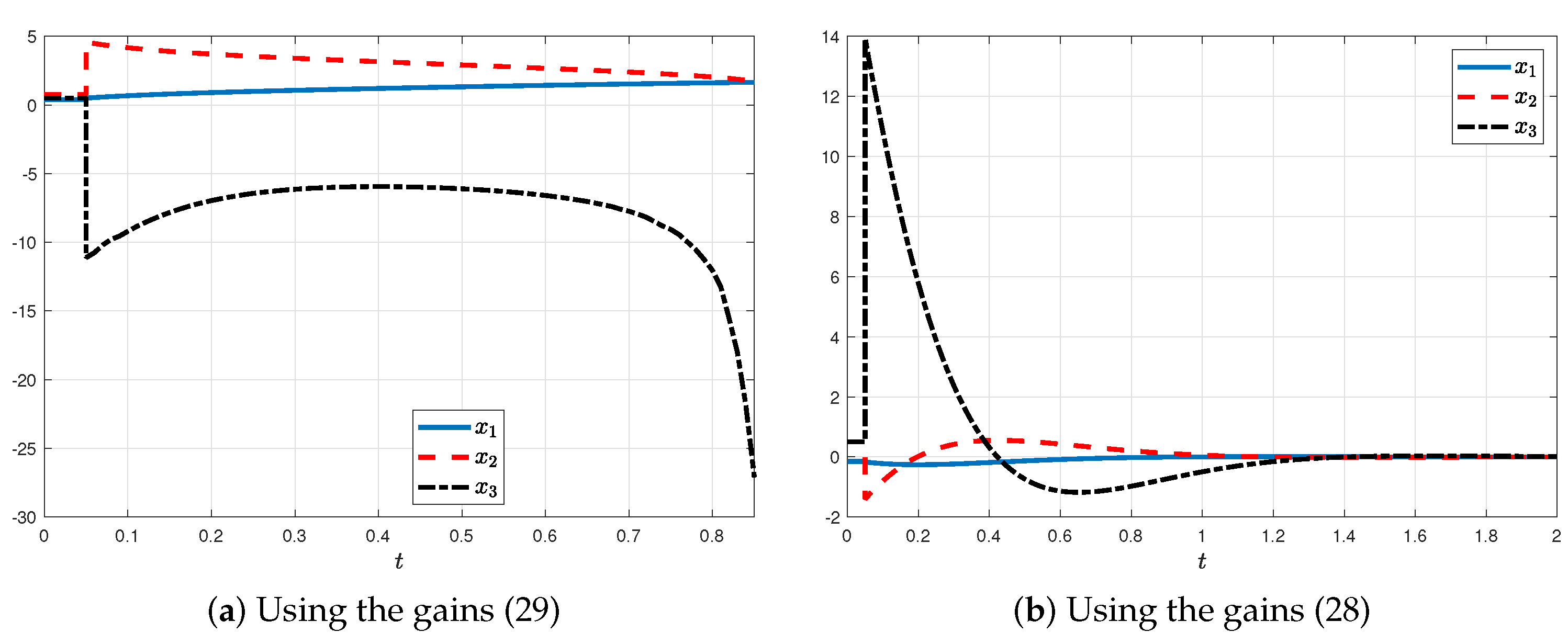
- Case 2:
- Case 3:
4.3. Comparative Explanations
- (i)
- (ii)
- (iii)
- For this class of systems, considering the effects of dynamic quantization, using a dynamic/static output feedback controller or an observer-based controller [16] can be a significant issue.
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Dai, L. Singular Control Systems; Lecture Notes in Control and Information Sciences; Springer: New York, NY, USA, 1989; Volume 118. [Google Scholar]
- Regaiega, M.A.; Kchaou, M.; Mohamed Chaabane, A.E.H. Robust H∞ guaranteed cost control for discrete-time switched singular systems with time-varying delay. Optim. Control Appl. Meth. 2019, 40, 119–140. [Google Scholar] [CrossRef]
- Wu, Y.; Lu, R.; Shi, P.; Su, H.; Wu, Z. Analysis and design of synchronization for heterogeneous network. IEEE Trans. Cybern. 2018, 48, 1253–1262. [Google Scholar] [CrossRef] [PubMed]
- Wu, Y.; Lu, R. Event-based control for network systems via integral quadratic constraints. IEEE Trans. Circuits Syst. Pap. 2018, 65, 1386–1394. [Google Scholar] [CrossRef]
- Wu, Y.; Lu, R.; Shi, P.; Su, H.; Wu, Z.G. Sampled-Data Synchronization of Complex Networks With Partial Couplings and T-S Fuzzy Nodes. IEEE Trans. Fuzzy Syst. 2018, 26, 782–793. [Google Scholar] [CrossRef]
- Mahmoud, M. Switched Time-Delay Systems; Springer: Boston, MA, USA, 2010. [Google Scholar]
- Gu, K.; Kharitonov, V.; Chen, J. Stability of Time-Delay Systems; Springer: Berlin/Heidelberg, Germany, 2003. [Google Scholar]
- Kchaou, M. Robust observer-based sliding mode control for nonlinear uncertain singular systems with time-varying delay and input non-linearity. Eur. J. Control 2019, 49, 15–25. [Google Scholar] [CrossRef]
- Feng, Z.; Li, W.; Lam, J. New admissibility analysis for discrete singular systems with time-varying delay. Appl. Math. Comput. 2015, 265, 1058–1066. [Google Scholar] [CrossRef]
- Wu, Z.; Li, B.; Gao, C.; Jiang, B. Observer-based H∞ control design for singular switching semi-Markovian jump systems with random sensor delays. ISA Trans. 2019, 124, 290–300. [Google Scholar] [CrossRef] [PubMed]
- Chen, J.; Lin, C.; Chen, B.; Wang, Q. Mixed H∞ and passive control for singular systems with time delay via static output feedback. Appl. Math. Comput. 2017, 293, 244–253. [Google Scholar] [CrossRef]
- Jiang, B.; Gao, C.; Xie, J. Passivity based sliding mode control of uncertain singular Markovian jump systems with time-varying delay and nonlinear perturbations. Appl. Math. Comput. 2015, 271, 187–200. [Google Scholar] [CrossRef]
- Zhiqiang, Z.; Daniel, W.H.; Yijingm, W. Fault tolerant control for singular systems with actuator saturation and nonlinear perturbation. Automatica 2010, 46, 569–576. [Google Scholar]
- Zhang, L.; Boukas, E.K.; Haidar, A. Delay-range-dependent control synthesis for time-delay systems with actuator saturation. Automatica 2008, 44, 2691–2695. [Google Scholar] [CrossRef]
- Tarbouriech, S.; Gomes da Silva, J. Synthesis of controllers for continuous-time delay systems with saturating controls via LMIs. IEEE Trans. Autom. Control 2000, 45, 105–111. [Google Scholar] [CrossRef] [Green Version]
- Fu, L.; Ma, Y.; Wang, C. Mix quantized control for singular time-delay system with nonlinearity and actuator saturation. J. Frankl. Inst. 2020, 357, 3953–3974. [Google Scholar] [CrossRef]
- Xie, X.; Lam, J.; Fan, C.; Wang, X.; Kwok, K.W. Energy-to-Peak Output Tracking Control of Actuator Saturated Periodic Piecewise Time-Varying Systems With Nonlinear Perturbations. IEEE Trans. Syst. Man Cybern. Syst. 2021, 52, 2578–2590. [Google Scholar] [CrossRef]
- Jemai, W.J.; Jerbi, H.; Abdelkrim, M.N. Nonlinear state feedback design for continuous polynomial systems. Int. J. Control Autom. Syst. 2011, 9, 566–573. [Google Scholar] [CrossRef]
- Kchaou, M. Robust H∞ Observer-Based Control for a Class of (TS) Fuzzy Descriptor Systems with Time-Varying Delay. Int. J. Fuzzy Syst. 2017, 19, 909–924. [Google Scholar] [CrossRef]
- Yan, S.; Gu, Z.; Park, J.H.; Xie, X. Sampled Memory-Event-Triggered Fuzzy Load Frequency Control for Wind Power Systems Subject to Outliers and Transmission Delays. IEEE Trans. Cybern. 2022, 1–11. [Google Scholar] [CrossRef]
- Yan, S.; Gu, Z.; Park, J.H.; Xie, X. Adaptive Memory-Event-Triggered Static Output Control of T-S Fuzzy Wind Turbine Systems. IEEE Trans. Fuzzy Syst. 2022, 30, 3894–3904. [Google Scholar] [CrossRef]
- Xiaojing, H.; Yuechao, M.; Lei, F. Finite-time dynamic output-feedback dissipative control for singular uncertainty T–S fuzzy systems with actuator saturation and output constraints. J. Frankl. Inst. 2020, 357, 4543–4573. [Google Scholar]
- Selvaraj, P.; Kaviarasan, B.; Sakthivel, R.; Karimi, H.R. Fault-tolerant SMC for Takagi–Sugeno fuzzy systems with time-varying delay and actuator saturation. IET Control Theory Appl. 2017, 11, 1112–1123. [Google Scholar] [CrossRef]
- Dang, Q.V.; Vermeiren, L.; Dequidt, A.; Dambrine, M. LMI approach for robust stabilization of Takagi–Sugeno descriptor systems with input saturation. IMA J. Math. Control Inf. 2017, 35, 1103–1114. [Google Scholar] [CrossRef]
- Yuecha, M.; Menghua, C.; Qingling, Z. Memory dissipative control for singular T–S fuzzy time-varying delay systems under actuator saturation. J. Frankl. Inst. 2015, 352, 3947–3970. [Google Scholar]
- Mendel, J.M.; John, R.I.; Liu, F. Interval Type-2 Fuzzy Logic Systems Made Simple. IEEE Trans. Fuzzy Syst. 2006, 14, 808–821. [Google Scholar] [CrossRef]
- Li, Y.; Lam, H.K.; Zhang, L.; Li, H.; Liu, F.; Tsai, S.H. Interval type-2 fuzzy-model-based control design for time-delay systems under imperfect premise matching. In Proceedings of the 2015 IEEE International Conference on Fuzzy Systems (FUZZ-IEEE), Istanbul, Turkey, 2–5 August 2015; pp. 1–6. [Google Scholar] [CrossRef] [Green Version]
- Jerbi, H.; Kchaou, M.; Alshammari, O.; Abassi, R.; Popescu, D. Observer-based feedback control of interval-valued fuzzy singular system with time-varying delay and stochastic faults. Int. J. Comput. Commun. Control 2022, 17, 3894–3904. [Google Scholar] [CrossRef]
- Najariyan, M.; Qiu, L. Interval Type-2 Fuzzy Differential Equations and Stability. IEEE Trans. Fuzzy Syst. 2022, 30, 2915–2929. [Google Scholar] [CrossRef]
- Fu, L.; Lam, H.K.; Liu, F.; Zhou, H.; Zhong, Z. Robust Tracking Control of Interval Type-2 Positive Takagi–Sugeno Fuzzy Systems With External Disturbance. IEEE Trans. Fuzzy Syst. 2022, 30, 4057–4068. [Google Scholar] [CrossRef]
- Song, W.; Tong, S. Fuzzy decentralized output feedback event-triggered control for interval type-2 fuzzy systems with saturated inputs. Inf. Sci. 2021, 575, 639–653. [Google Scholar] [CrossRef]
- Li, H.; Pan, Y.; Zhou, Q. Filter Design for Interval Type-2 Fuzzy Systems With D Stability Constraints Under a Unified Frame. IEEE Trans. Fuzzy Syst. 2015, 23, 719–725. [Google Scholar] [CrossRef]
- Kavikumar, R.; Sakthivel, R.; Kaviarasan, B.; Kwon, O.; Marshal Anthoni, S. Non-fragile control design for interval-valued fuzzy systems against nonlinear actuator faults. Fuzzy Sets Syst. 2019, 365, 40–59. [Google Scholar] [CrossRef]
- Yan, S.; Gu, Z.; Park, J.H.; Xie, X. Distributed-Delay-Dependent Stabilization for Networked Interval Type-2 Fuzzy Systems With Stochastic Delay and Actuator Saturation. IEEE Trans. Syst. Man Cybern. Syst. 2022, 1–11. [Google Scholar] [CrossRef]
- Chen, Y.; Fei, S.; Li, Y. Robust Stabilization for Uncertain Saturated Time-Delay Systems: A Distributed-Delay-Dependent Polytopic Approach. IEEE Trans. Autom. Control 2017, 62, 3455–3460. [Google Scholar] [CrossRef]
- Feng, Z.; Shi, P. Admissibilization of Singular Interval-Valued Fuzzy Systems. IEEE Trans. Fuzzy Syst. 2017, 25, 1765–1776. [Google Scholar] [CrossRef]
- Park, I.S.; eun Park, C.; Kwon, N.K.; Park, P. Dynamic output-feedback control for singular interval-valued fuzzy systems: Linear matrix inequality approach. Inf. Sci. 2021, 576, 393–406. [Google Scholar] [CrossRef]
- Zhengchao, X.; Deli, W.; Pak Kin, W.; Wenfeng, L.; Jing, Z. Dynamic-output-feedback based interval type-2 fuzzy control for nonlinear active suspension systems with actuator saturation and delay. Inf. Sci. 2022, 607, 1174–1194. [Google Scholar]
- Chang, W.-J.; Lin, Y.-W.; Lin, Y.-H.; Pen, C.-L.; Tsai, M.-H. Actuator Saturated Fuzzy Controller Design for Interval Type-2 Takagi-Sugeno Fuzzy Models with Multiplicative Noises. Processes 2021, 9, 823. [Google Scholar] [CrossRef]
- Gassara, H.; Kchaou, M.; Hajjaji, A.E.; Chaabane, M. Control of Time Delay Fuzzy Descriptor Systems with Actuator Saturation. Circuits Syst. Signal Process. 2014, 33, 3739–3756. [Google Scholar] [CrossRef]
- Feng, Z.; Zhang, H.; Du, H.; Jiang, Z. Admissibilisation of singular interval type-2 Takagi–Sugeno fuzzy systems with time delay. IET Control Theory Appl. 2020, 14, 1022–1032. [Google Scholar] [CrossRef]
- Park, P.; Lee, W.I.; Lee, S.Y. Auxiliary function-based integral inequalities for quadratic functions and their applications to time-delay systems. J. Frankl. Inst. 2015, 352, 1378–1396. [Google Scholar] [CrossRef]
- Uezato, E.; Ikeda, M. Strict LMI conditions for stability, robust stabilization, and H∞ control of descriptor systems. In Proceedings of the IEEE Conference on Decision and Control, Phoenix, AZ, USA, 7–10 December 1999; pp. 4092–4097. [Google Scholar]
- Sun, X.; Zhang, Q. Admissibility Analysis for Interval Type-2 Fuzzy Descriptor Systems Based on Sliding Mode Control. IEEE Trans. Cybern. 2019, 49, 3032–3040. [Google Scholar] [CrossRef]
- Sun, X.; Zhang, Q. Admissibility analysis of interval type-2 uncertain stochastic descriptor systems. Neurocomputing 2018, 311, 387–396. [Google Scholar] [CrossRef]
- Zhu, B.; Zhang, X.; Zhao, Z.; Xing, S.; Huang, W. Delay-Dependent Admissibility Analysis and Dissipative Control for T-S Fuzzy Time-Delay Descriptor Systems Subject to Actuator Saturation. IEEE Access 2019, 7, 159635–159650. [Google Scholar] [CrossRef]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Symbol | Acronym/Notation |
|---|---|
| ℝ | set of the real numbers |
| n-dimensional Euclidean space | |
| real matrix | |
| real symmetric positive definite matrix | |
| norm of the matrix | |
| transpose of the matrix | |
| eigenvalue of a matrix | |
| * | term that is induced by symmetry |
| r | number of if-then rules |
| LMI | linear matrix inequalities |
| IT-2 | Interval type-2 fuzzy model |
| TS | Takagi–Sugeno |
| Lower Membership Functions | Upper Membership Functions |
|---|---|
| Lower Membership Functions | Upper Membership Functions |
|---|---|
| Lower Membership Functions | Upper Membership Functions |
|---|---|
| with , and | with , and |
| with and | and |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kchaou, M.; Regaieg, M.A.; Jerbi, H.; Abbassi, R.; Stefanoiu, D.; Popescu, D. Admissible Control for Non-Linear Singular Systems Subject to Time-Varying Delay and Actuator Saturation: An Interval Type-2 Fuzzy Approach. Actuators 2023, 12, 30. https://doi.org/10.3390/act12010030
Kchaou M, Regaieg MA, Jerbi H, Abbassi R, Stefanoiu D, Popescu D. Admissible Control for Non-Linear Singular Systems Subject to Time-Varying Delay and Actuator Saturation: An Interval Type-2 Fuzzy Approach. Actuators. 2023; 12(1):30. https://doi.org/10.3390/act12010030
Chicago/Turabian StyleKchaou, Mourad, Mohamed Amine Regaieg, Houssem Jerbi, Rabeh Abbassi, Dan Stefanoiu, and Dumitru Popescu. 2023. "Admissible Control for Non-Linear Singular Systems Subject to Time-Varying Delay and Actuator Saturation: An Interval Type-2 Fuzzy Approach" Actuators 12, no. 1: 30. https://doi.org/10.3390/act12010030