1. Introduction
Nanopositioning stages find applications in various industries, such as microscopy, semiconductors, materials science, and photonics. Many times, usage of a stage requires special environments such as a vacuum or cryogenic conditions. Mounting a nanopositioning stage into these environments can be challenging. Piezoelectric elements implemented in a stage require power, and power transmission can be done through long cables. The motivation of this study is to realize a cableless nanopositioner. One way of realizing a cableless nanopositioner is to drive a piezoelectric actuator or a motor wirelessly. For example, in an atomic force microscopy, multiple samples may need to be observed in vacuum or clean room conditions. As the sample environment would be in vacuum, sample changing and bringing the environment into vacuum conditions for every sample would be time and energy consuming. A nanopositioner with a wireless remote control option can have great benefits. Multiple linear or rotary positioning stages could bring multiple samples one at a time under the scanning unit without losing vacuum conditions. Even if multiple stages are used in a chamber, a single driver from outside can adjust their positions one at a time with a “set and go” option.
Piezoelectric motors used in nanopositioning applications are devices that make use of the inverse piezoelectric effect, which allows piezoelectric materials to convert electrical energy into mechanical movement. Through frictional coupling, this tiny mechanical movement is transferred to a sliding element as limitless linear or rotating movement [
1,
2,
3,
4]. Among the various types of piezoelectric motors, such as resonant (ultrasonic), inertial, and piezo-walk types [
5], inertial type motors are adapted better to the specific environments mentioned above.
When a piezoelectric element is excited with a sawtooth signal waveform, back-and-forth tangential movements at a friction surface between a slider and a stator are generated. The tangential movement is slow in one direction, so the slider adheres to the stator’s contact region, and both move together. During the quick reverse movement, the slider slips and remains behind the stator’s contact region. At the end of one operating cycle, the slider element makes a microscopic step. A macroscopic movement is created by the accumulation of these microscopic steps [
6,
7].
One well known method to generate slow and fast or fast and slow reciprocating motions is by exciting piezoelectric elements with an asymmetrical triangular or sawtooth driving electrical signal. There are many techniques to accomplish reciprocating movement at the stator–slider contact area. One such technique is to simultaneously activate system harmonics or stator resonance modes at the same time [
8,
9]. In such cases, the contribution of each mode can make reciprocating movement at the contact area. The other method involves using an asymmetric mechanical structure, in which a symmetrical square waveform can generate asymmetrical reciprocal movements [
10].
The inertia drive principal is well established and positioners with nanometer resolutions are produced commercially [
3].
Due to the unpleasant audible noise during multi-layer actuator operation, it is desirable to increase operating frequency to be above 20 kHz. Additionally, the nature of a sawtooth signal waveform requires the bandwidth of an amplifier to be wider. The reason is that the fast phase of the sawtooth signal needs to be in the range of 1 to 3 µs to ensure sufficient sliding movement. When the operating frequency is at 20 kHz, which corresponds to a period of 50 µs, the fast phase of the signal is ideally 1 µs. That means a driver should have at least a bandwidth of 500 kHz so that the potential on a multilayer actuator can change from high to low or low to high level within 1 µs time. Standard class-D audio amplifiers with a bandwidth of 20 kHz are not capable to provide a signal with short enough slip time to ensure a fast sliding movement.
In a class-D topology, transistors at the power section are operated at ON (saturation) and OFF (cut-off) modes, which allow these amplifiers to be operated at high efficiency [
11,
12]. The target signal waveforms are initially defined in square waveforms with varying duty cycles, final signal waveforms are obtained after square waveforms are filtered [
13]. There have been attempts to drive capacitive loads by using switched amplifiers, however, operating frequencies were only up to several kilohertz [
14].
In our previous work, we showed that both slow and fast charging and discharging of piezoelectric multilayer actuators in a two-phase piezoelectric inertia-type motor can be realized with a class-D amplifier topology using Gallium Nitride (GaN)transistors as the switching elements [
15]. In drive electronics, slow charging or discharging of multilayer actuators can be accomplished by slowly increasing or decreasing the duty cycle of the pulse-width-modulated (PWM) signal. Slow charging or discharging corresponds to the stick phase operation of inertia-type motors, which can be realized by a standard class-D amplifiers. The challenge here is making fast charging or discharging of a multilayer actuator to generate slippage at the slider friction coupler contact. Here, fast switching elements such as GaN transistors play a critical role. We observed that sudden switching of the voltage waveforms from high to low is due to the natural response of an RLC network, whereas sudden switching of the voltage waveforms from low to high is due to the step response of an RLC network. Since the natural resonance frequency of an inductor (L) in series to a multilayer actuator, which can be treated as a capacitance, is more than 100 kHz, a slippage takes place during natural or step responses of the RLC network. In this research, the same class-D amplifier topology is used to power piezoelectric inertia drive-type motors wirelessly.
Applications for wireless power transfer technologies include biomedical equipment, induction cooking, and chargers for computers and cell phones [
16]. The possibilities of wireless power transfer are being expanded by current research and development activities, which enables the technology to find uses in other industries. For example, energizing a piezoelectric transducer on a rotary machining device for generating ultrasonic vibration at the rotating tool is done by magnetically coupled wireless power transfer. In this driving technique transducer drive signal in sinusoidal for at a resonance frequency was transferred wirelessly [
17,
18].
This research proposes an innovative use of wireless power transfer technology to power piezoelectric inertia-type motors, where the piezoelectric multilayer actuators function as an actuator to produce deformation and a capacitor to filter high frequency electrical signals, respectively, in the mechanical and electrical domains. Since in a vacuum or cryogenic environment, a positioner should be isolated, wireless driving could initiate remotely controlled nanopositioners.
The proposed wireless driving method is implemented on a two-phase piezoelectric inertia-drive-type motor. The structure of this motor is introduced in the following section. Driving this motor with class-D amplifier topology is presented in
Section 2.2. The same class-D topology was also adapted to drive the piezoelectric inertia-type motor wirelessly, which is introduced in
Section 3. After presenting initial measurement results in
Section 4, the manuscript is finished with conclusions.
3. Wireless Driving of Two-Phase Piezoelectric Inertia-Type Motor
When discussing wireless power transfer, two different types of systems must be differentiated: near field and far field. Far-field systems use electromagnetic radiation such as microwaves or laser beams to transfer power. The transmission range is large and there is a trade-off between efficiency and directionality. Near-field systems either use magnetic field or electric field coupling. These techniques are further classified based on the resonance phenomena employed. However, near-field systems inherit challenging design constraints which limit efficiency and transmission distance [
16].
Both non-resonant electromagnetic induction and magnetic resonance methods involve coupling the components through magnetic field inductance. In its fundamental from, this system is comprised of a transmitter (primary coil) and receiver (secondary coil). Wireless power transfer is initiated once an alternating voltage is applied to a transmitter coil, which results in current flow through the coil. As stated by Ampere’s law, current flow through a conducting wire generates a right-rotating magnetic field. If the conducting wire loops around itself, the magnetic field rotates while crossing the loop. The magnetic field passes through the secondary-side coil loop interlinking both coils. The oscillating field induces an alternating voltage as described by Faraday’s law of induction. As a result, an alternating current flows through the receiver [
21].
Gallium Nitride (GaN) transistors, which can operate at high frequencies with small ON resistance, were implemented as the switching elements in a class-D amplifier topology. To drive a class-d amplifier topology for generating sawtooth waveforms, high-frequency PWMs with variable duty cycles were generated. The pulse width modulation (PWM) principle is a widely used technique in switching mode power conversion [
22].
Sawtooth driving signal waveforms at 30 kHz were first converted into PWM signals at frequencies of 1.0 MHz. Two complementary PWM signals as seen in
Figure 6 are first amplified by the full bridge configuration seen in
Figure 7. Amplified PWM signals drive a transmitter coil. Created electromagnetic energy is than picked up by the receiver coil.
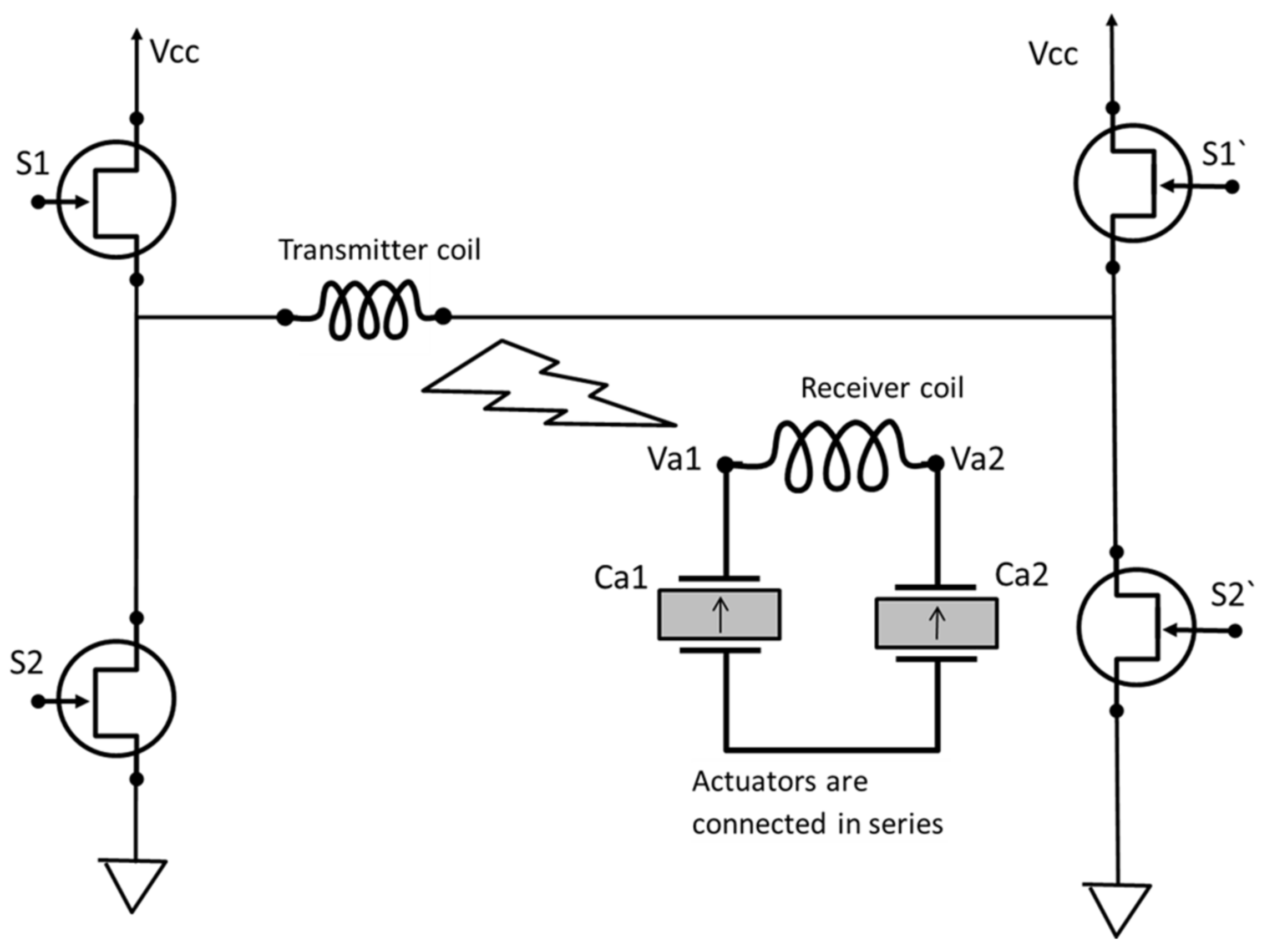
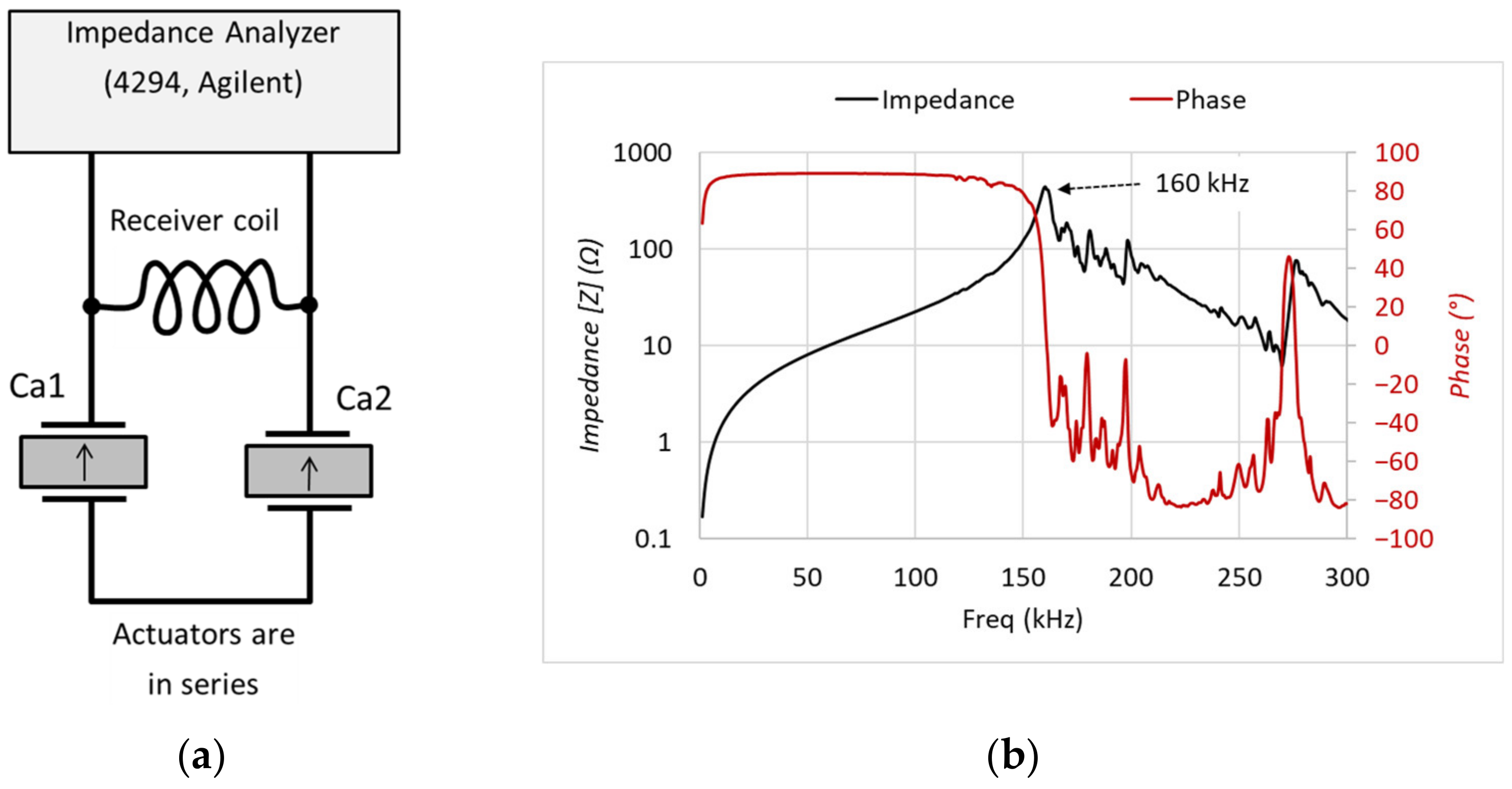
At the receiver side, the receiver coil is in parallel to the piezoelectric multilayer actuators, which are connected in series. When this LC network was connected to an impedance analyzer (4294, Agilent, Santa Clara, CA, USA) as seen in
Figure 8a, the magnitude of the impedance and phase spectra were measured. Since the inductance (L) of the receiver coil is 24 µH, and equivalent capacitance C for the serially connected multilayer actuators is 40 nF, then the natural resonance frequency for the LC network can be found as 162.4 kHz. This frequency value is quite close to the experimentally obtained value that is 160 kHz (
Figure 8b).
The LC configuration of the receiving coil (L) and the equivalent capacitance (C) of the piezoelectric multilayer actuators in the stator act as a filter. The voltage waveform accumulated on the piezoelectric actuators are modified sawtooth waveforms. Without a physical connection between the driving electronics and the motor, these signals allow the motor to run. Note that connection of the receiver coil and the multilayer actuators in series can cause one actuator to expand and the other to shrink.
Wireless driving was demonstrated on a positioning stage, in which a two-phase piezoelectric inertia-type motor was embedded.
Figure 9 shows the details of the wireless drive electronics, the transmitter, and the receiver coils with the positioning stage. PWM signals for the booster and for the two half bridges, as well as the timing signals for the positioning stage, were generated by programing a microcontroller development kit (CY8CKIT-059 PSoC 5LP, Infineon Technologies AG, Neubiberg, Germany). The generated PWM signals with their timing sequences were applied to a Booster and two half bridge switching elements. The same switching Gallium Nitride high electron mobility transistors (GaN HEMT, EVAL-HB-Parallel GaN, Infineon Technologies AG, Neubiberg, Germany) are used in the booster and the two half bridges for their high frequency operation capability with small switching losses. While the booster converts DC 24 V to 40 V, the PWM coded sawtooth driving signals cause the two half bridges to operate like one full bridge, as seen the schematic in
Figure 7. After the magnitudes of the PWM signals were amplified from 5 V to 40 V by the full bridge configuration of the GaN transistors, the PWM signals at 1 MHz were directly applied to the transmitter coil (24 µH, Vishay IWTX4646DCEB240JF1). An identical coil, placed 0.7 cm apart from the transmitter coil, was used as the receiver coil.
The receiver coil, which makes an LC network with the serially connected capacitances of the multilayer actuators, picked the PWM signals at 1 MHz. The response of the LC network during slip time was the same as in the wired driving condition, except equivalent resistance is due to the losses of the receiver coil’s inductance L (24 µH) and serially connected capacitance of the multilayer actuators C (40 nF). As can be seen in
Figure 10, the damping factor and thus the equivalent resistance compared to wired driving are smaller. Sinusoidal ringing due to step and natural responses is not damped out instantly, but the effect is visible through each period. However, slow charging and discharging by the PWM signals are visible as in the case of the wired drive.
4. Wireless Burst Waveform Drive and Step Movement Measurements
When driving a piezoelectric motor wirelessly, the positioning ability of the piezoelectric stages should be evaluated. A nanopositioning stage equipped with a piezoelectric inertia-type motor can easily make very small steps. If step movements are not small enough, the actuators in a stage can be operated with DC voltage to obtain nanometer resolutions. When driving an inertia-type motor wirelessly, obtaining smaller steps would be limited by the number of driving pulses transmitted to the receiver coil. Precision of a stage would be limited by the smallest number of driving pulses that can make a slider move. In our case even a single driving pulse can make the slider move.
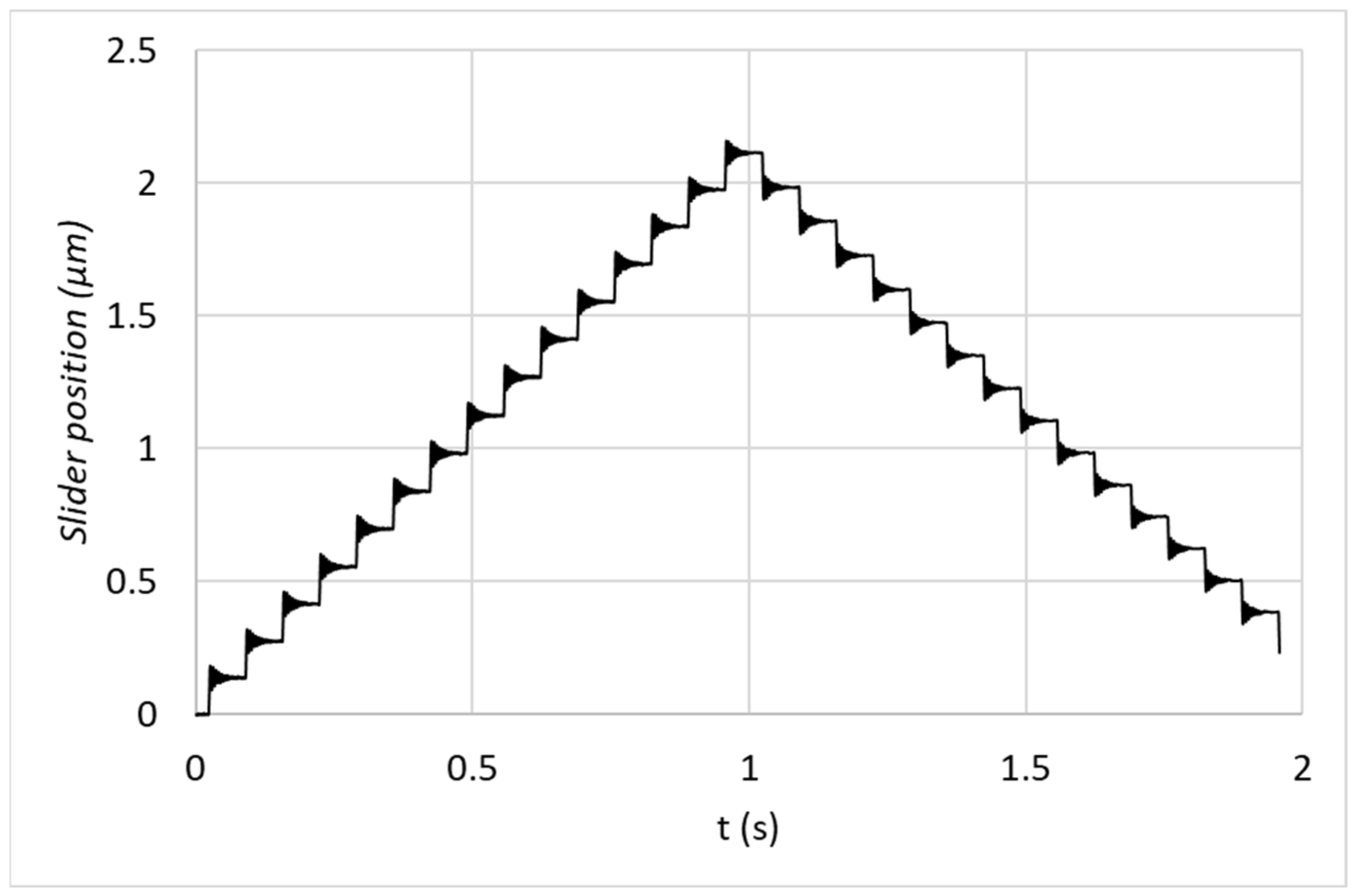
To examine the positioning ability of the piezoelectric inertia-type motor, wireless drive electronics send single steps to the receiving coil 15 times in one direction and 15 times to make the stage to come to its original position. The slider position was captured by an encoder-type position sensor integrated into the positioning stage. Even if our aim is to energize position sensor electronics wirelessly, the position sensor signals were transferred to a control electronics by the existing cables on the stage. As can be seen in
Figure 11, even a single driving pulse (or signal) can generate a movement.
Figure 11 demonstrates that open loop step movements as small as 140 nanometers in one direction and 125 nanometers in the opposite direction can be obtained. These values can vary with the position of the transmitter and receiver coils as coupling can change with the position of the coils. During those measurements, the distance between the receiver and the transmitter was fixed at 0.7 cm. The step size can be optimized with the magnitudes of the driving signals, the carrier frequency (in our case, frequency of the PWM signals), and motor operating frequency (30 kHz).
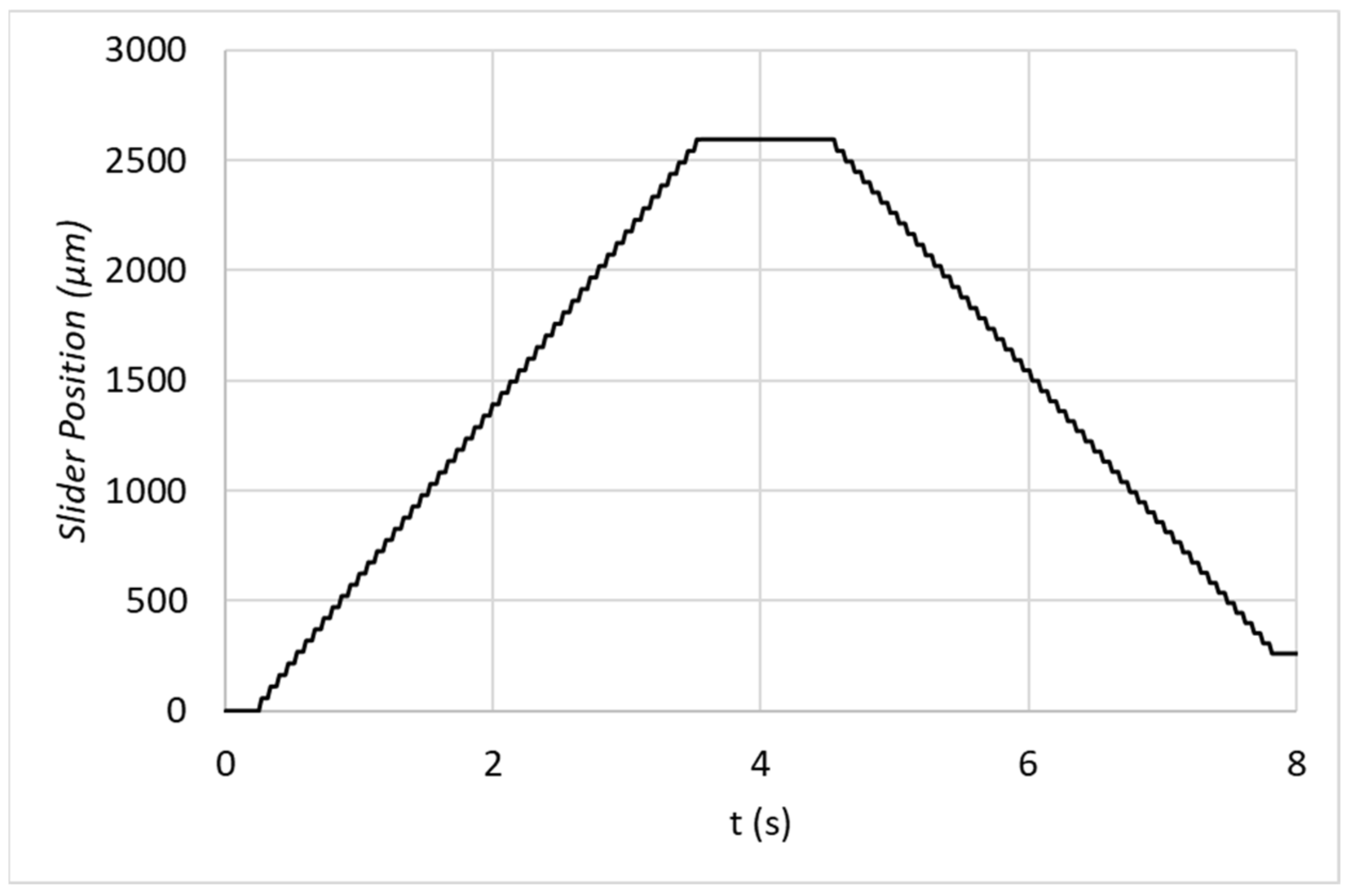
In the following measurements, the driving number of pulses for each step movement sent to the receiver coil was increased to 100 and applied 50 times to move the slider in one direction and 50 times to move it in the opposite directions. 100 driving pulses made the slider move about 52 µm, which made the movement per pulse to be about 0.52 µm in one direction and 0.47 µm in return direction. As shown in
Figure 12, when multiple driving pulses are sent, mean step size per pulse increased significantly. However, consistency of direction-dependent step size difference is visible. The direction dependency can be related to mechanics of the motor or tolerance of the multilayer actuators. Detailed analysis for finding the reason is left for future work.
The single step duration, which is only 33 µs, is not long enough for the slider to follow the friction coupler because it is heavier and thus has longer response time compared to the friction coupler. As a result, the step size in response to a single step is smaller than the movement per pulse for multiple pulse driving.
5. Conclusions
A wireless driving method for piezoelectric inertia-drive-type motors is introduced (to the best of our knowledge) for the first time. In other words, we propose a wireless method of energy transfer from electrical into mechanical form. The proposed method can lead to the realization of cableless nanopositioning stages.
In an inertia-type motor, the stick phase, which corresponds to slow charging or discharging of the multilayer actuators, is realized by changing the duty ratio of PWM signals at very high frequency. The slip phase, on the other hand, occurs with either a natural response or step response of an RLC network. In the RLC network, L is the inductor used in front of the multilayer actuators, C is the capacitance of the multilayer actuators, and R is the equivalent resistance of the inductor and the capacitance losses of the multilayer actuators.
Class-D amplifier topology, realized with GaN transistors, offers quite an elegant solution for driving piezoelectric inertia motors wirelessly. Usage of GaN transistors with their fast switching and low switching losses can increase the bandwidth of a typical class-D amplifier to more than 500 kHz. The proposed driving method can also be used for wired drive of piezoelectric inertia-type motors. Since power dissipation from the drive electronics takes place only during operation of a positioning stage, a drive electronics can operate at a high efficiency.




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}











