1. Introduction
The power system provides easy-to-use, efficient, and less polluting electrical energy that is widely used, promoting change in all areas of social production, and its size and technology have become one of the recognized signs of a country’s level of economic development. High-voltage circuit breakers have the role of protecting and controlling the power system; their reliability is the basis for ensuring the safe and stable operation of the power system [
1,
2]. Previous studies have shown that many of the failures of high-voltage circuit breakers are caused by the failure of the operating mechanism [
3,
4]. Compared with other types of actuators, the spring actuator has the advantage of requiring a small capacity of power supply, and it can be used in both remote electric energy storage and manual operation; therefore, it is widely used in high-voltage circuit breakers [
5]. Moreover, a typical spring actuator works in different positions and seasons when the environmental temperature and relative humidity are different. Therefore, there is an urgent need to study the laws of temperature and relative humidity and their effects on the operating mechanism and its internal parts to ensure its safe operation.
Many experts and scholars have explored the effects of temperature on the performance of actuators. In order to obtain the characteristics of shape-memory alloy spring actuators, Jianzuo et al. [
6] investigated the output force and displacement of shape-memory alloy springs at different temperatures. The results show that the output displacement of the shape memory alloy spring actuator increases with an increase in temperature. Hyo et al. [
7] evaluated the characteristics of shape memory alloy spring actuators and performed isothermal loading and unloading, shape recovery force measurements, temperature tracking, and load tracking tests on the actuators. Hu et al. [
8] proposed a position controller that includes anti-saturation and anti-overheating functions to control the position of the shape memory alloy actuator. The position control simulation model of the spring actuator was established and simulated. The results showed that the established model and control method could effectively control the position of shape memory alloy actuators. Degeratu et al. [
9] conducted thermal analysis experiments on the spring actuator, in order to determine the transition temperature of the shape memory alloy spring actuator, and developed a comprehensive graphical interface based on the thermal analysis results. In order to bring the shape memory alloy spring mechanism to a given temperature, Park et al. [
10] used hot and cold water to heat and cool the mechanism. The results show that when the temperature increases from 301 K to 355 K, the spring mechanism can generate a force of 130 N, which can achieve the flexion and extension motion of the arm at a 1-HZ driving speed. Degeratu et al. [
11] performed a thermal analysis of the spring actuator material in order to improve the overall performance of the barrier structure, which was used to determine the operating time of this spring at different values of activation currents and phase transition rates. To develop more advanced sensor actuators, Holanda et al. [
12] proposed the use of some smart materials that can change their mechanical properties when subjected to certain thermodynamic loads and explored the effects of unbalanced excitation forces and temperature control systems. Xiong et al. [
13] established the thermodynamic theoretical model of an electrothermal shape memory alloy coil spring actuator under different conditions. They verified the thermodynamic characteristics of the actuator by numerical simulations and experimental tests and analyzed the temperature-force response and temperature-displacement response, as well as the force-displacement response at different temperatures.
Humidity can also have a strong effect on the actuator and the materials used for the actuator. Cabuz et al. [
14] showed that humidity was the main reason for the failure of a touch-mode electrostatic actuator. Ryabchun et al. [
15] explored the driving modes of an actuator material at different relative humidities and showed that the twisting, curling, and winding of the material varied with humidity. Arazoe et al. [
16] and Xu [
17] explored the performance changes of moisture-driven actuators when the relative humidity varied; the results showed that the actuators exhibited different performance values for different relative humidity variations. Wang et al. [
18] fabricated a soft actuator with a two-layer structure under multiple stimulus responses, and the results showed that the actuator exhibits different actuation performance according to changes in temperature and humidity. It is also worth noting that this paper explored the optimization of the internal heater parameters of the spring mechanism at different temperatures and humidity, which is also helpful for future research in terms of applications in the fields of medicine [
19], chemistry and biology [
20,
21], and micro- and nanofluidics [
22,
23,
24].
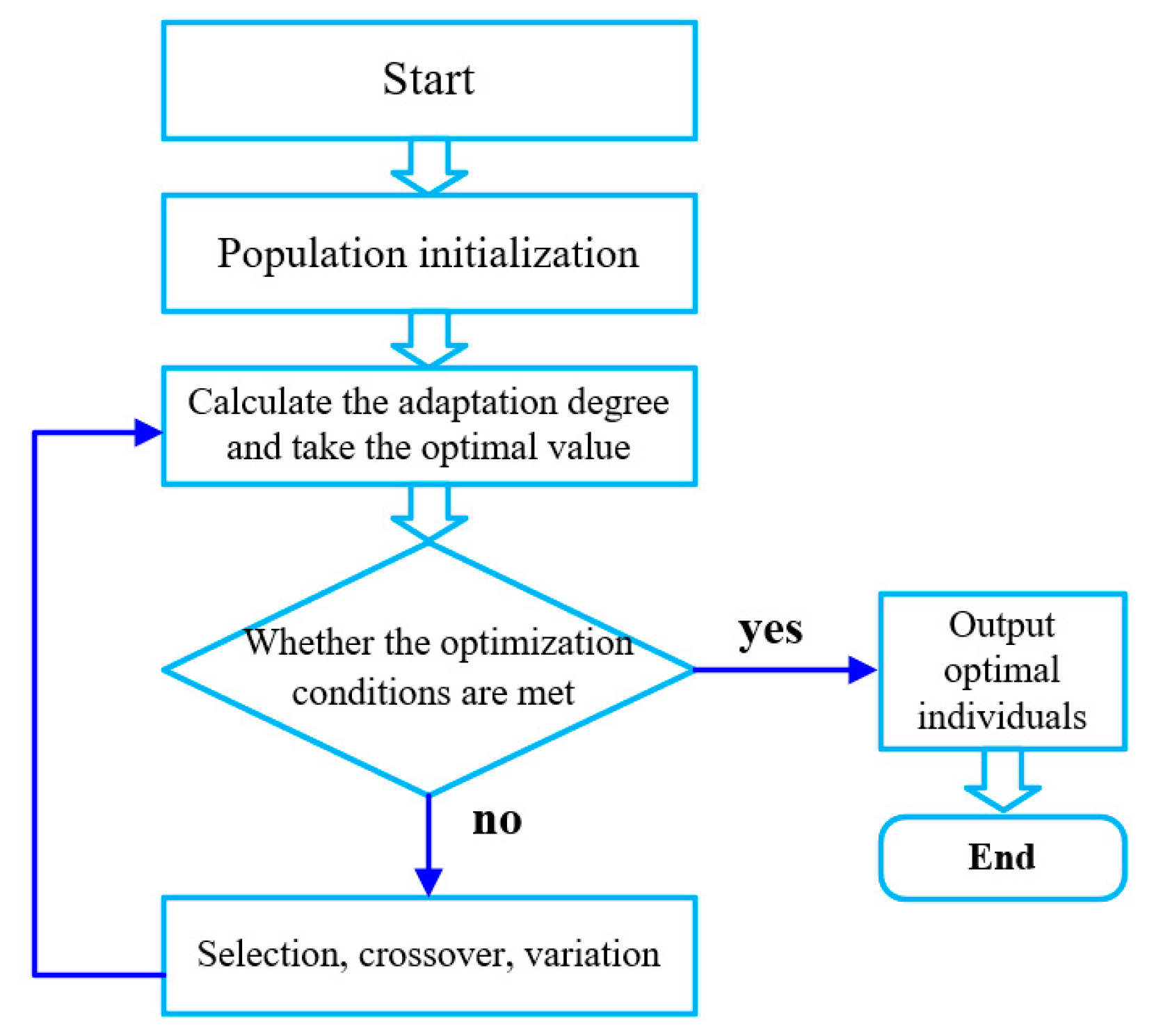
From the above literature review, it can be seen that many experts and scholars have studied the effect of temperature on the actuator material, while studies on the control of temperature and relative humidity in the actuator chamber to ensure the safe operation of the actuator are rare. In this paper, a response surface model and a genetic algorithm are used to optimize the design of the heating system for controlling the temperature and relative humidity in the chamber of a typical spring actuator. Many experts and scholars have conducted studies on the prediction and optimization of actuators and in many other areas using genetic algorithms [
25,
26,
27]. Dalla et al. [
28] proposed a model-based fault detection and isolation method using genetic algorithms to identify fault precursors before the system’s performance started to be compromised, in order to help detect initial faults in the flight control system, improve aircraft safety and reduce maintenance costs, and schedule maintenance interventions and actuator replacements in a timely manner. Lee et al. [
29] used a genetic algorithm to optimize the design of a new electromagnetic engine valve, in order to improve the vibration frequency of the armature and reduce the transition time of the engine valve. The high performance of the new actuator was also verified using dynamic finite element analysis. Foutsitzi et al. [
30] used a genetic algorithm to optimize the design of the beam structure, in order to obtain the best voltage and the best placeholder for the beam structure. The optimal values of the best placement and voltage obtained by the optimization were applied to the piezoelectric actuator to minimize the error between the achieved and desired shapes.
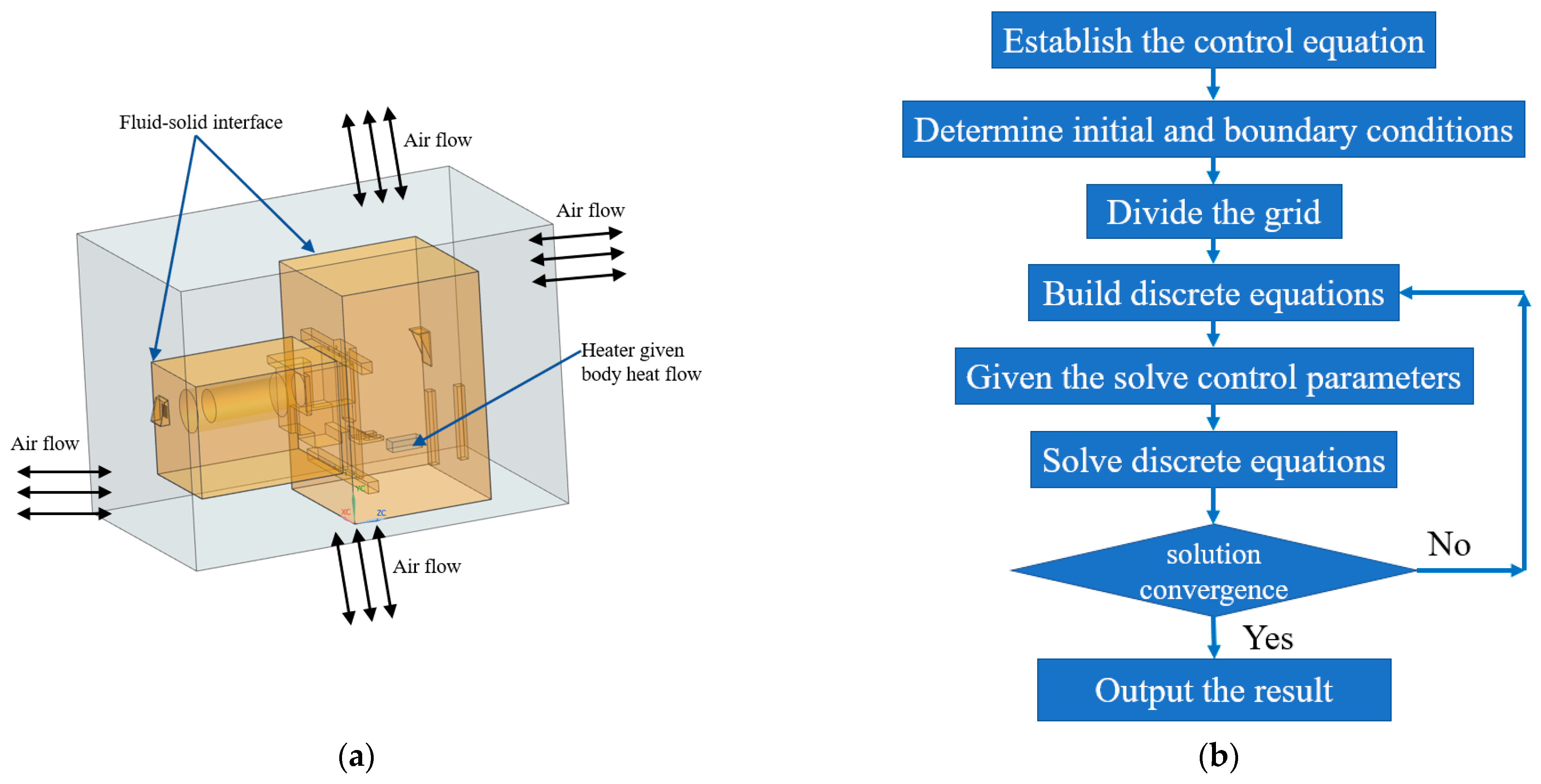
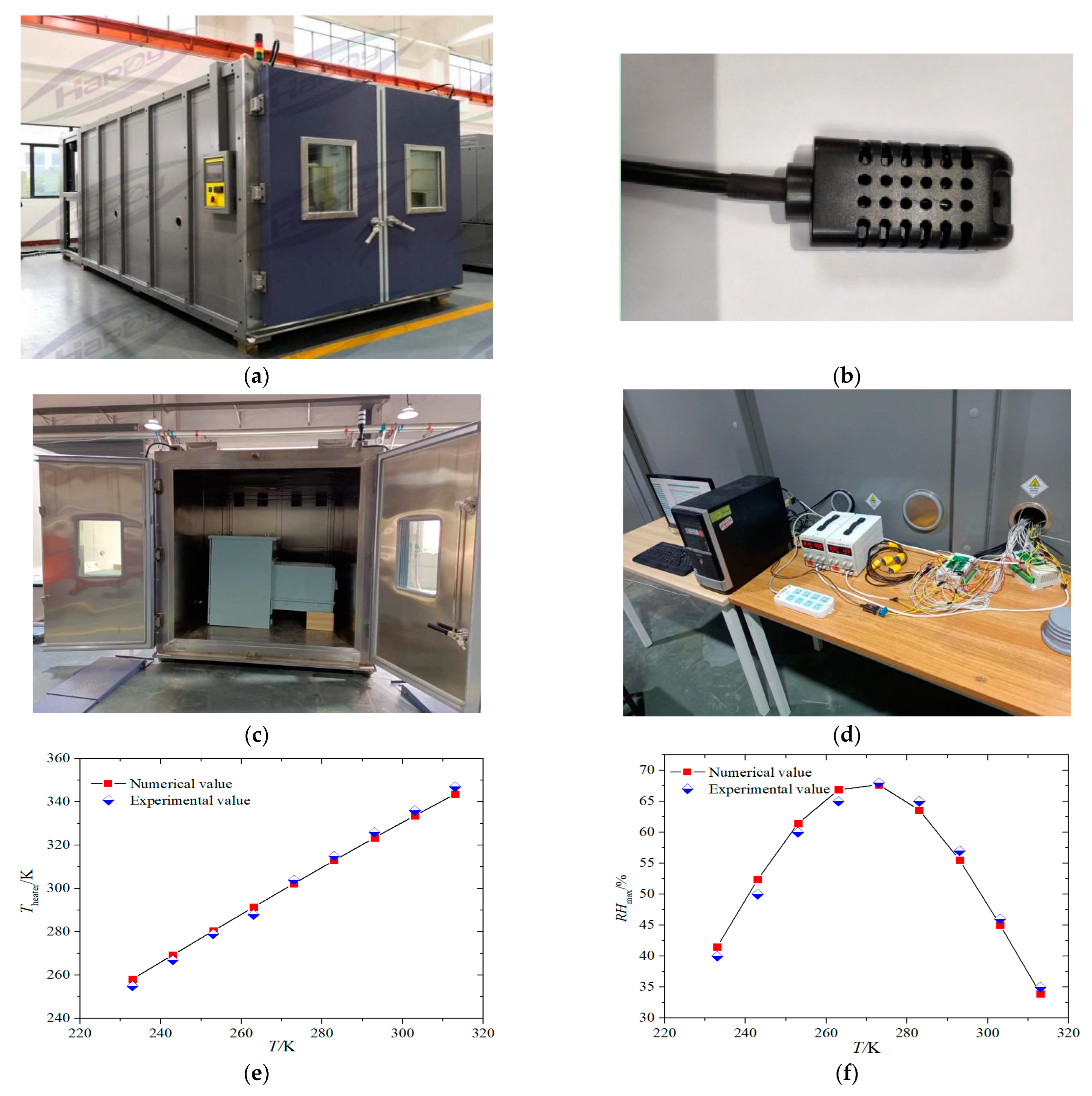
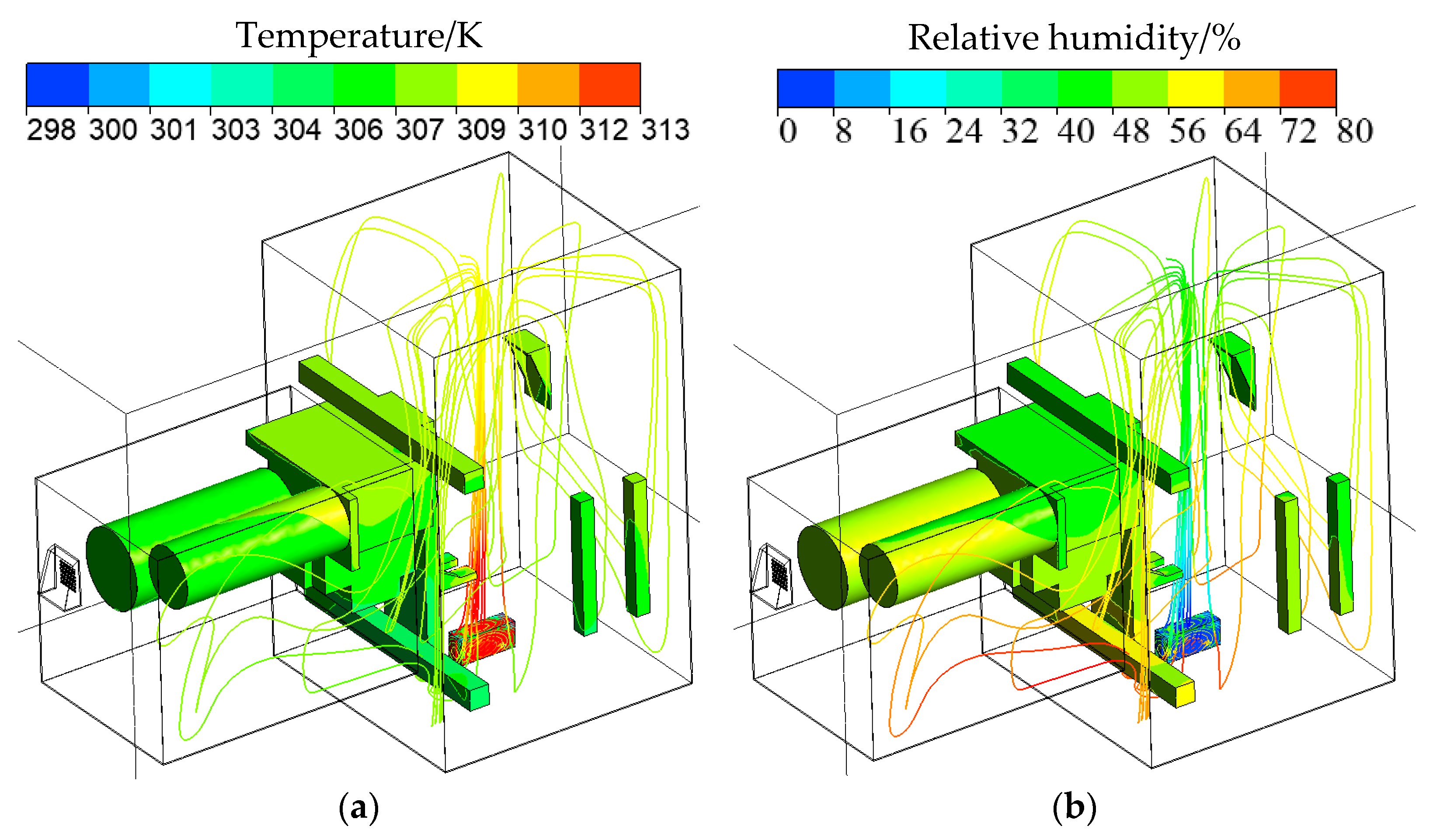
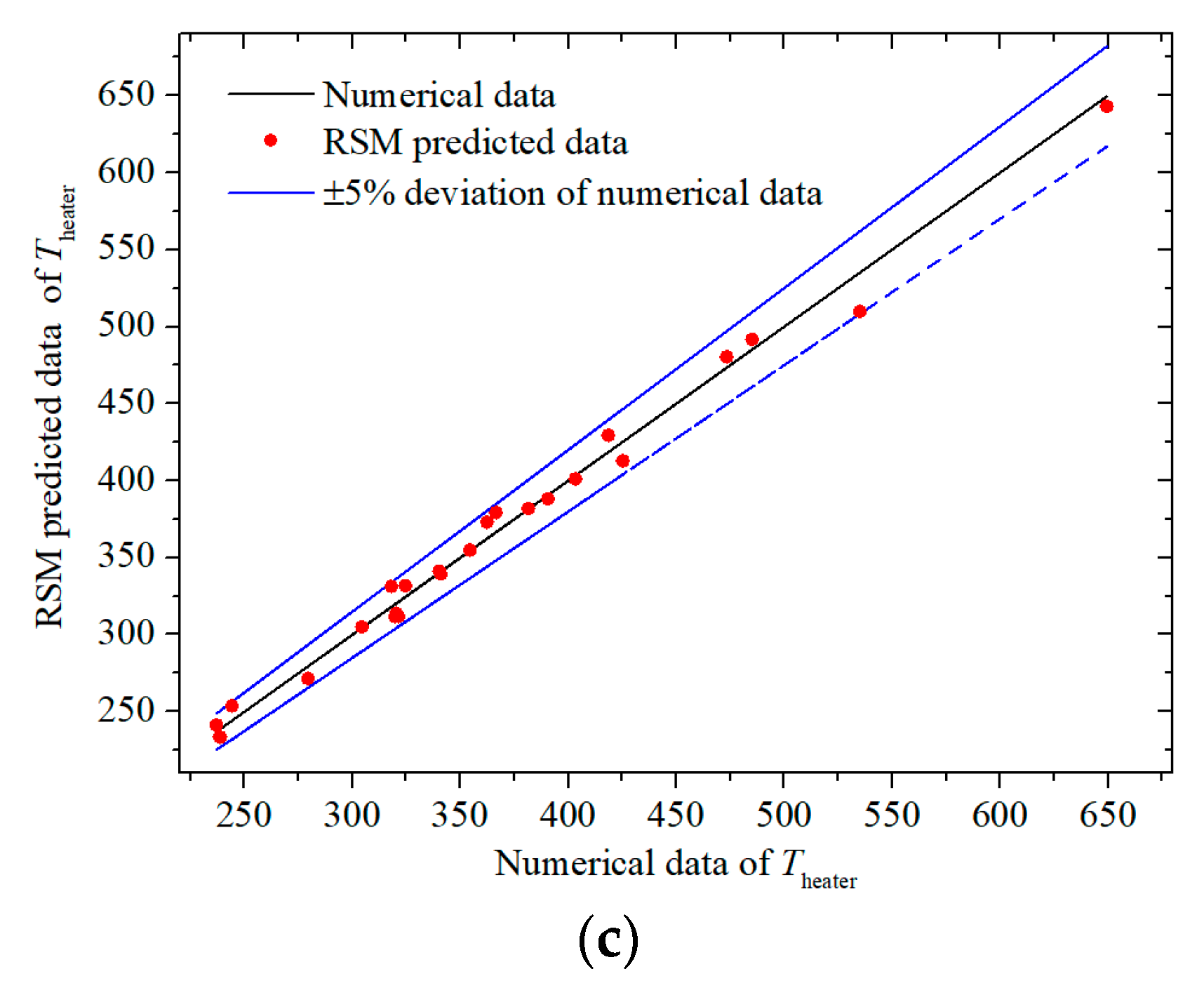
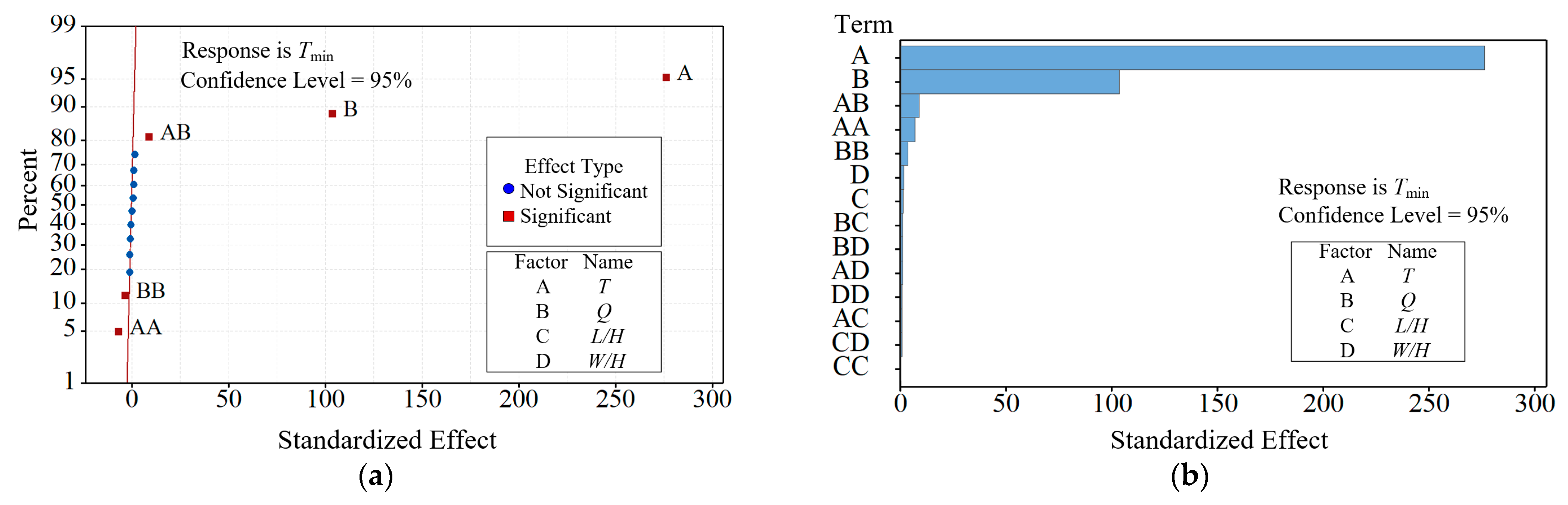
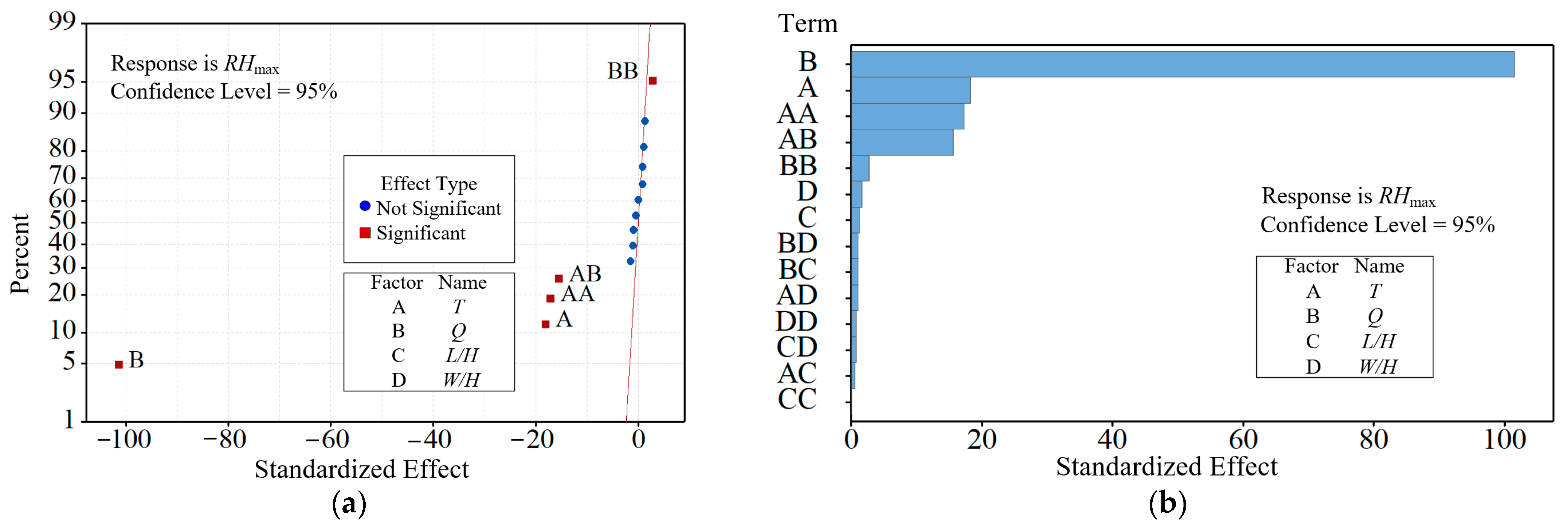
In summary, any change in temperature and humidity will have a great impact on the performance of the actuator, and unreasonable temperature and humidity distribution is likely to cause a failure in the performance of the actuator; therefore, it is necessary to build a heater in the actuator to obtain a suitable temperature and humidity range, so as to ensure the safe operation of the actuator. In response to the above questions, for this paper, the temperature and relative humidity calculation and heater optimization design of a typical spring actuator heating system were carried out, based on numerical simulation. Firstly, the temperature and humidity distribution characteristics inside the spring actuator chamber were analyzed; then, the empirical correlation equations of the minimum temperature, Tmin, maximum relative humidity, RHmax, and maximum heater surface temperature, Theater, were obtained, based on the experimental design and response surface model fitting with respect to the environmental temperature T, heater power Q, heater relative length L/H, and heater relative width, W/H. The empirical correlation equations were then analyzed with an ANOVA for accuracy, and the significance of the research parameters was analyzed; finally, the heater design of the spring-operated mechanism was optimized, based on the empirical correlation equations and the genetic algorithm.
2. Research Subject
The research object of this paper is a typical spring actuator, the structure of which is shown in
Figure 1, including the chamber, the springs, and the built-in heating system—the heater. The chamber is 1680 mm long, 784 mm wide, and 1225 mm high, and the parts inside the chamber need to work in an environment where the temperature is greater than 265 K, the relative humidity is less than 85%, and the maximum temperature of the heater surface is less than 340 K. Since the actuator faces a complex environment with large temperature and relative humidity differences, a heater needs to be fitted inside the chamber to ensure the normal operation of the spring actuator. The heater is arranged in the center of the right side of the chamber, 150 mm from the bottom, and the material is aluminum alloy. The height
H of the heater is constant at 55 mm, and the length
L and width
W of the heater are dimensionless, along with the relative length
L/
H and the relative width,
W/
H. The environmental relative humidity in this study is constant at 95%, the environmental temperature
T varies from 233 K to 313 K, the heating power
Q varies from 10 W to 500 W, and the relative length
L/
H of the heater varies from 2 to 6. The relative width
W/
H varies from 1 to 5. The detailed research parameters are shown in
Table 1. The response parameters include the minimum temperature,
Tmin, maximum relative humidity,
RHmax, and the maximum heater surface temperature,
Theater, inside the actuator chamber.


















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}