
Dynamic Performance of a Magnetic Energy-Harvesting Suspension: Analysis and Experimental Verification

 ,
, 

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
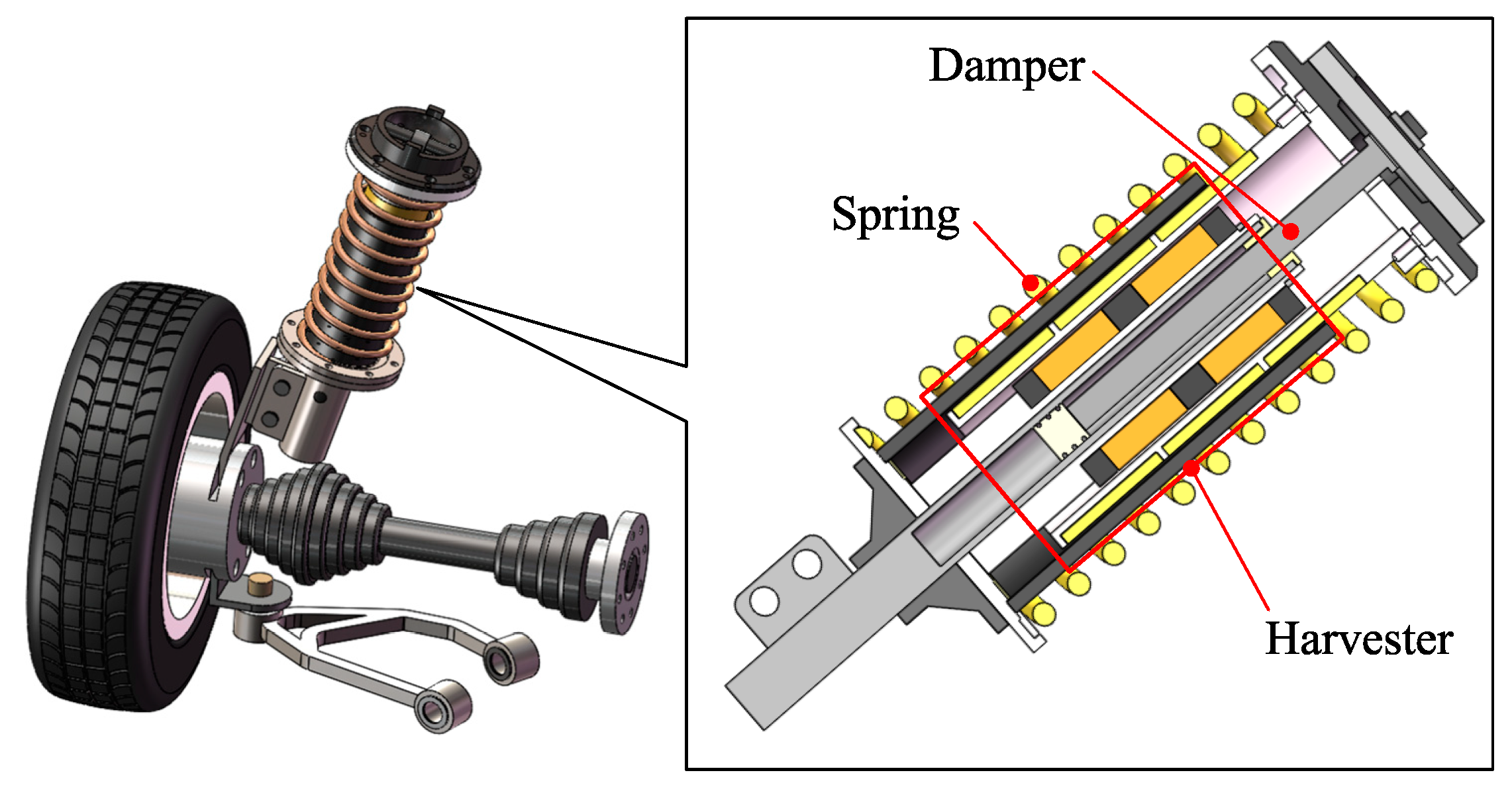
2. Structure and Working Principle of MEHS
2.1. Structure
2.2. Working Principle
3. Theoretical Modeling
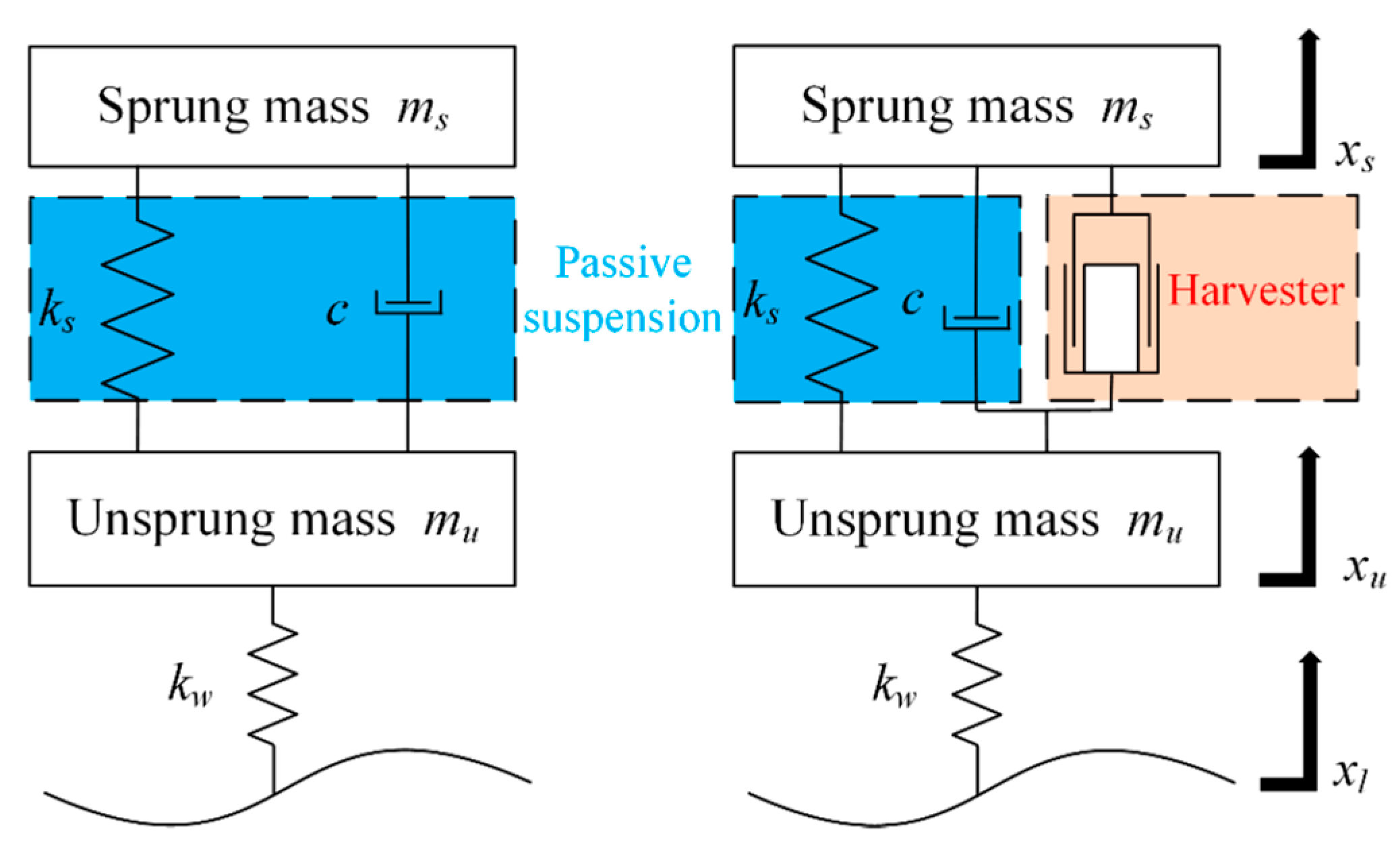
3.1. Quarter-Vehicle Model
3.2. Energy Harvesting
3.3. Ride Comfort
3.4. Road Handling
4. Parameters Analysis
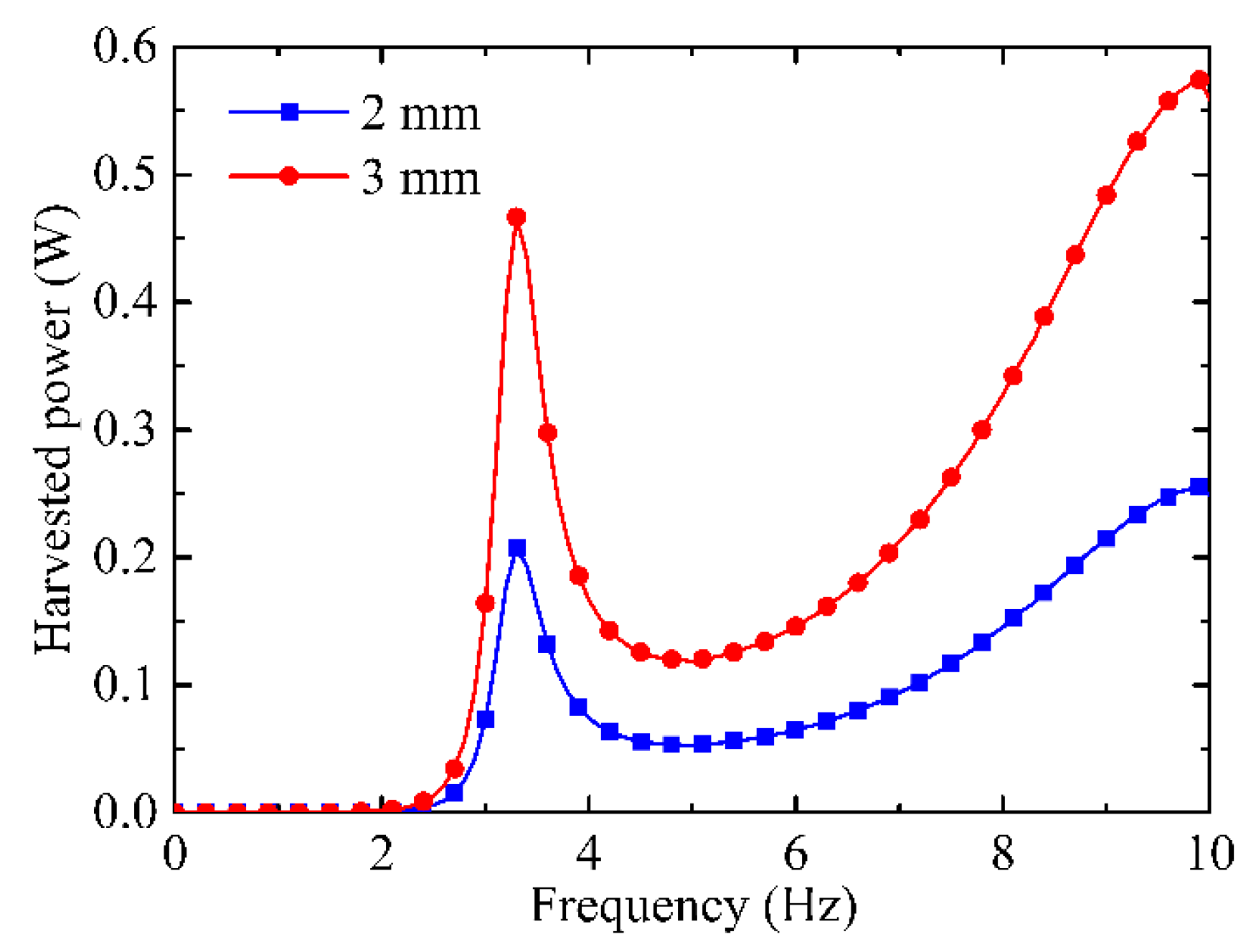
4.1. Influence of the Road Input
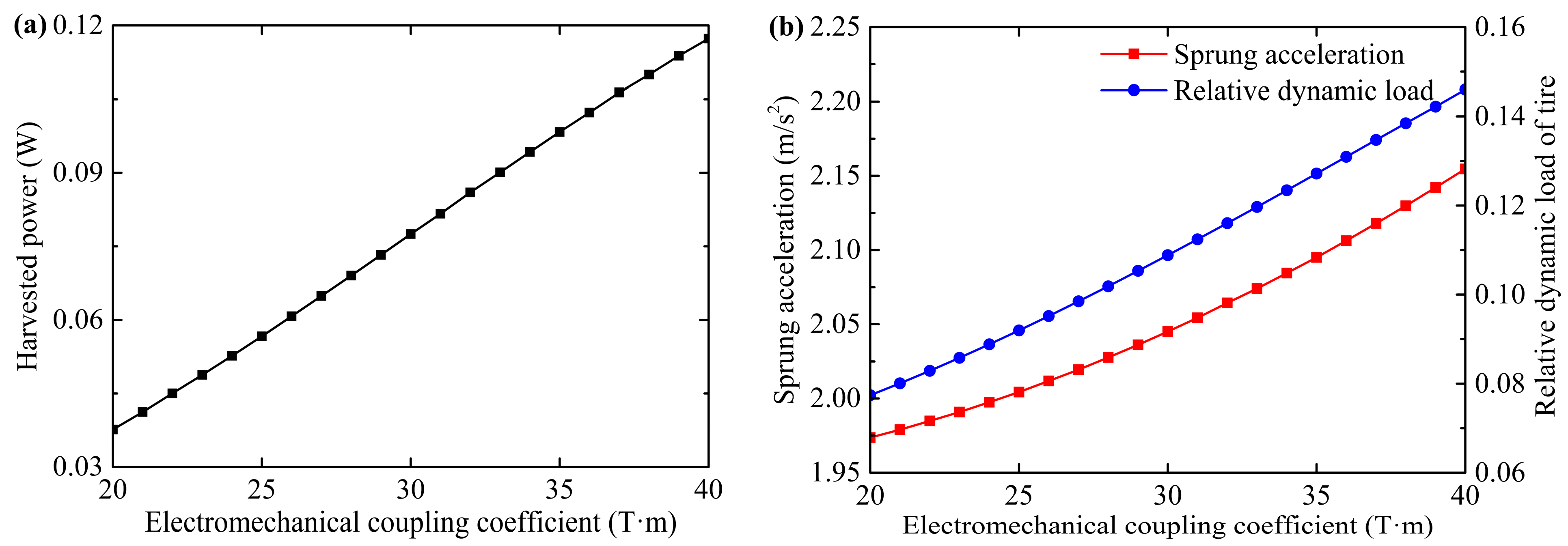
4.2. Influence of the Electromechanical Coupling Coefficient
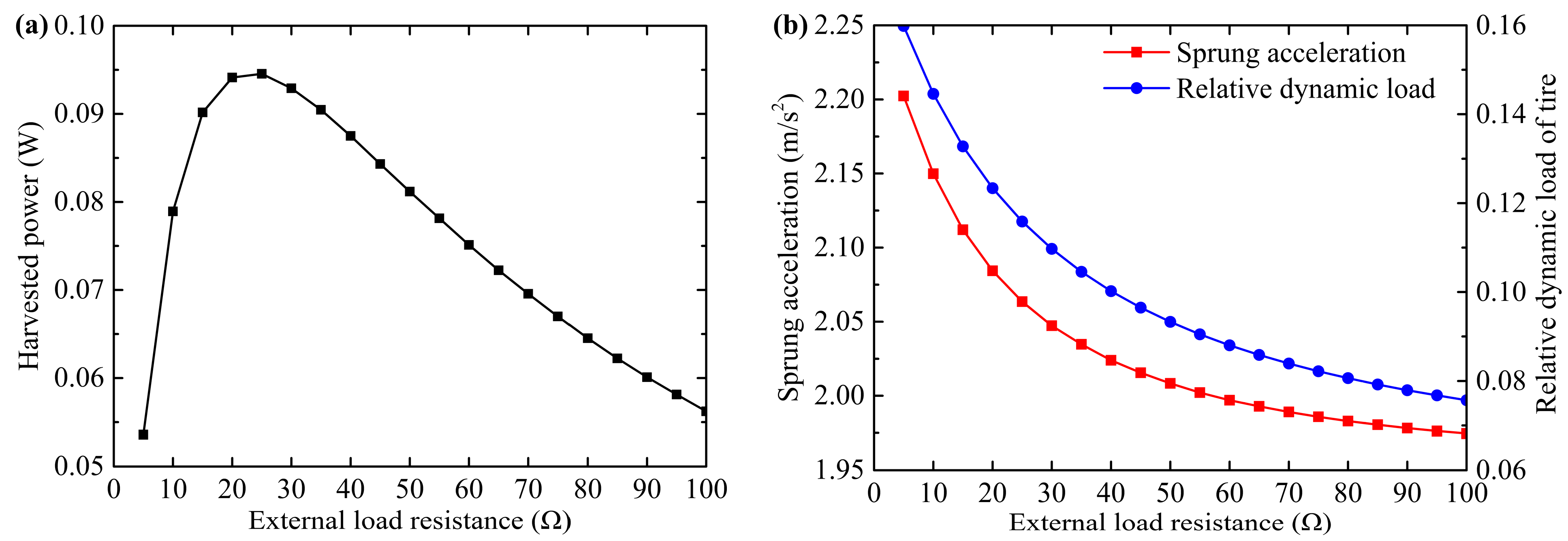
4.3. Influence of the External Load Resistance
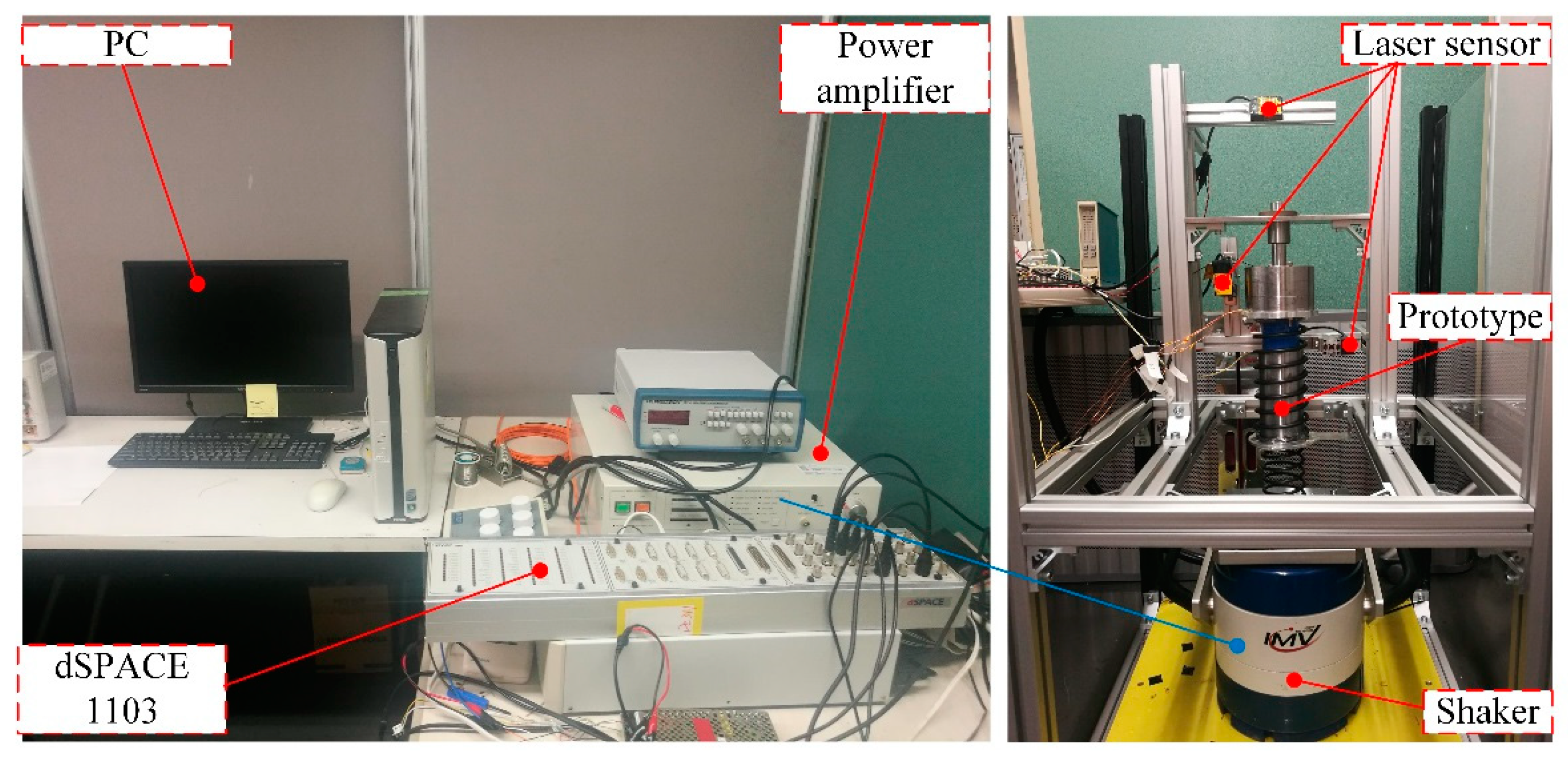
5. Experiment Verification
5.1. Experimental Setup
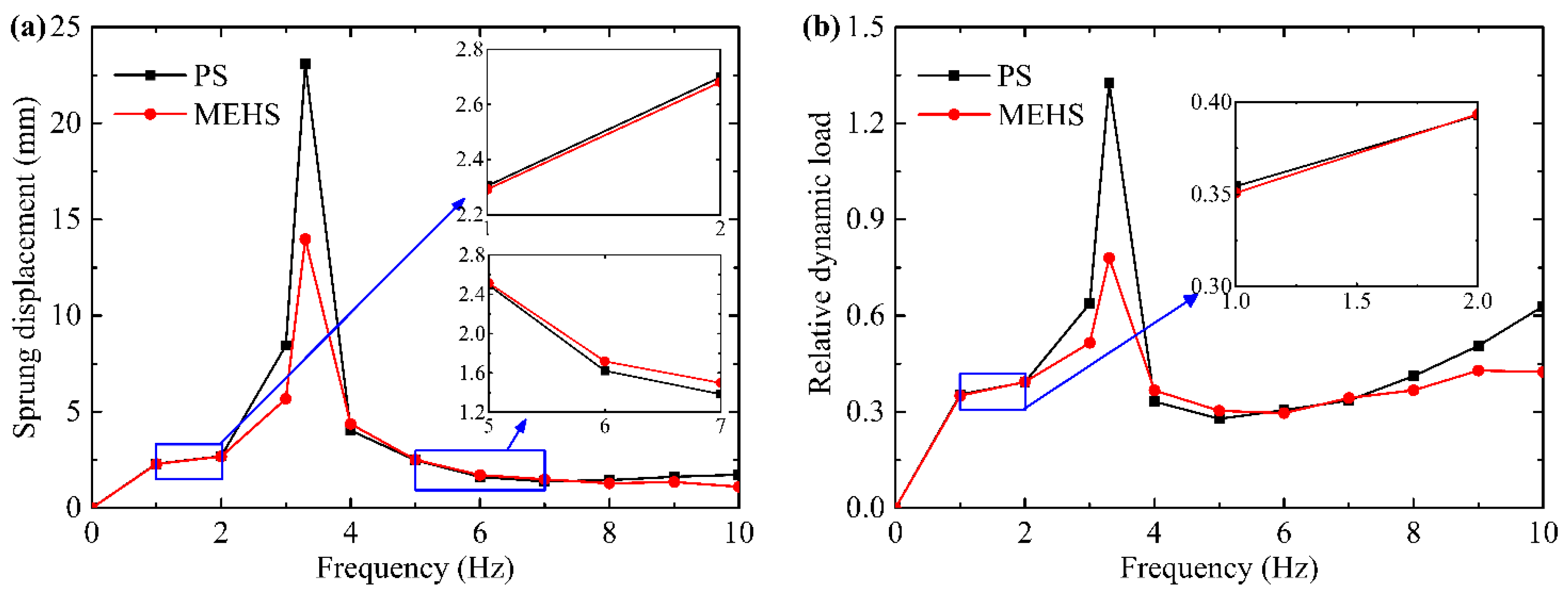
5.2. Experiment Results
5.3. Discussion
6. Conclusions
- (1)
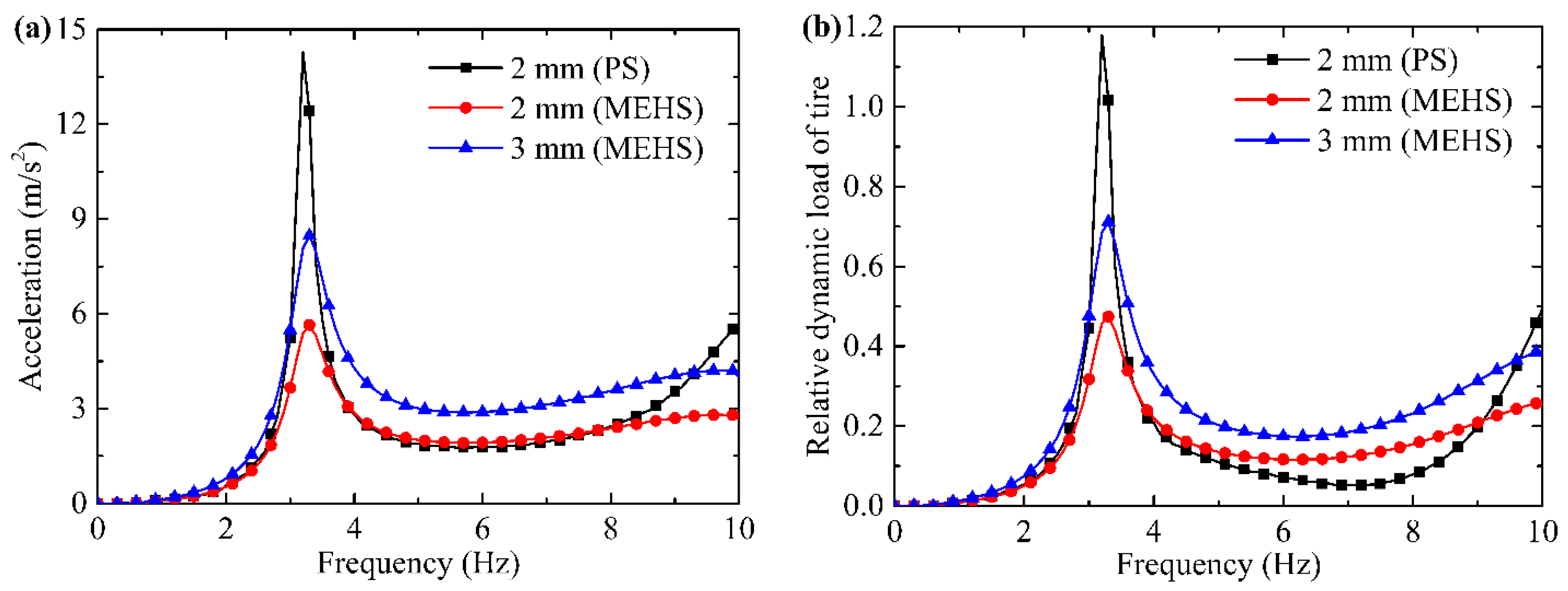
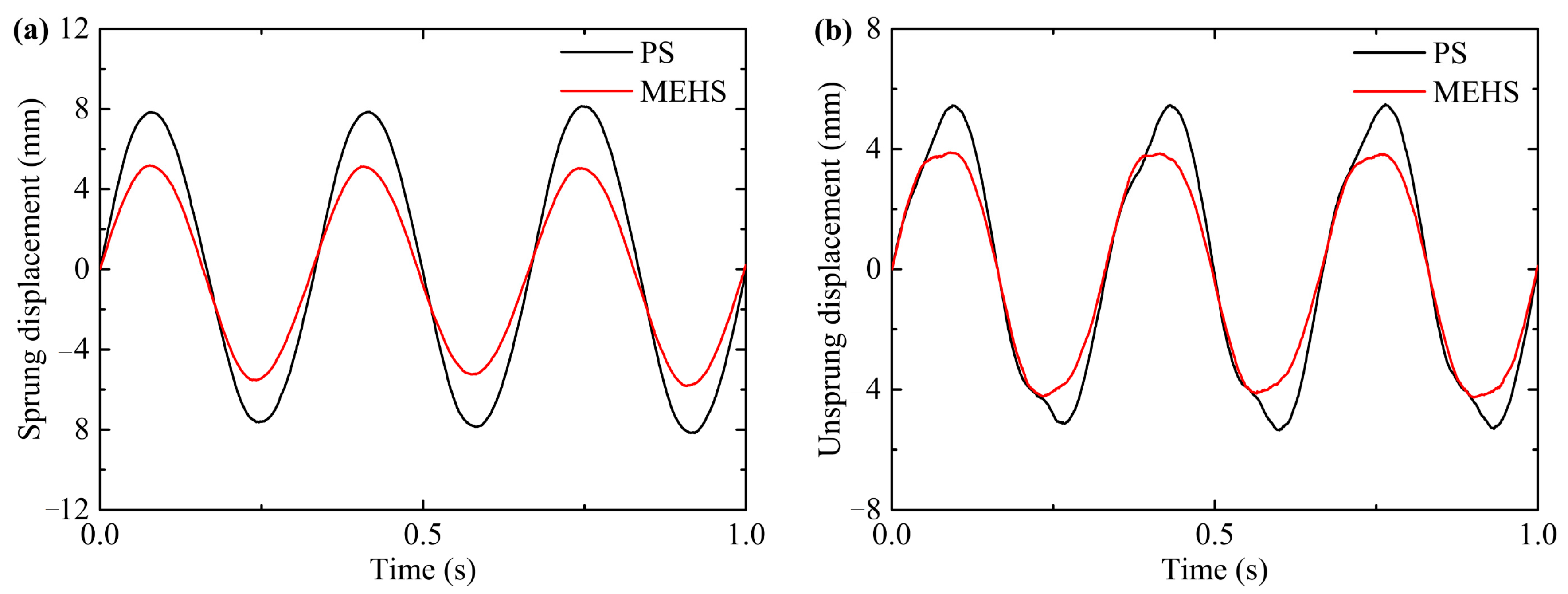
- Compared with the passive suspension (PS), the MEHS can effectively reduce the dynamic performance at the impact and periodic excitation. And the sprung displacement and relative dynamic load of the tire of MEHS are reduced by 39.45% and 41.18% at the periodic frequency 3.3 Hz, respectively.
- (2)
- In terms of the electromechanical coupling coefficient, the energy harvesting performance and the dynamic performance of the MEHS are contradictory.
- (3)
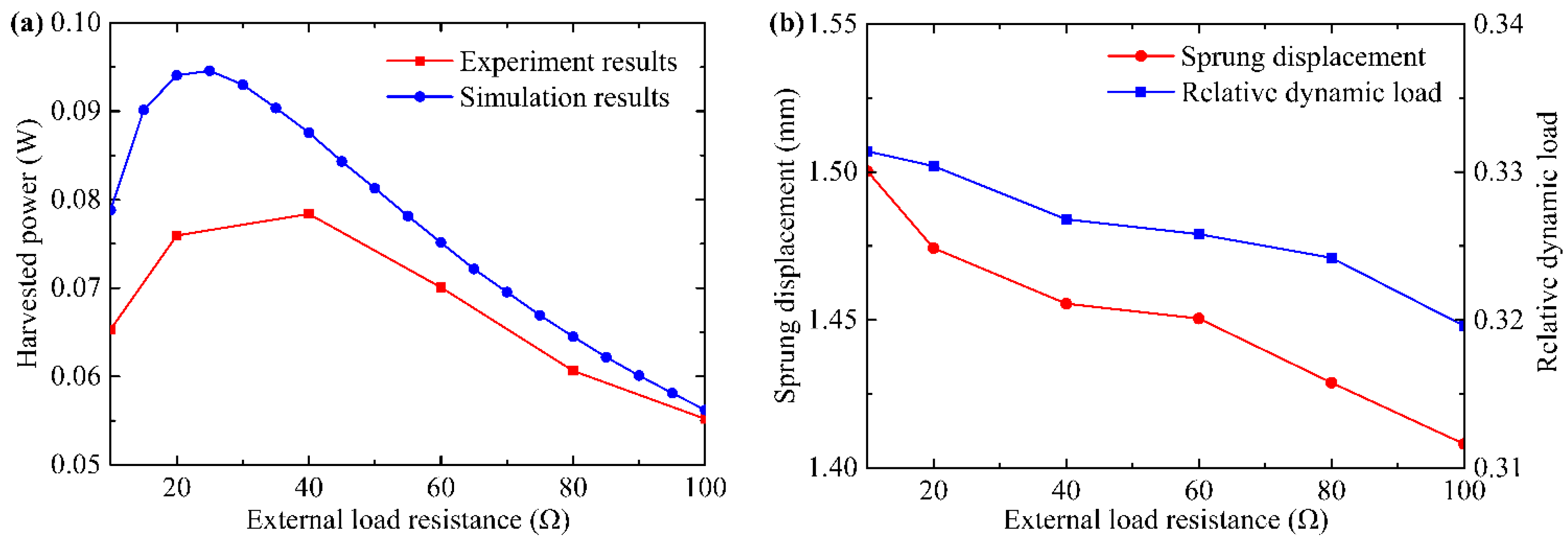
- With the increase of the external load resistance, the generated power and the dynamic performance of the suspension are contradictory at the periodic excitation 7 Hz.
- (4)
- Under the impact excitation and random excitation, the MEHS can change the damping characteristics to affect the dynamic performance of the suspension system.
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Biglarbegian, M.; Melek, W.; Golnaraghi, F. Intelligent control of vehicle semi-active suspension systems for improved ride comfort and road handling. In Proceedings of the NAFIPS 2006—2006 Annual Meeting of the North American Fuzzy Information Processing Society, Montreal, QC, Canada, 3–6 June 2006. [Google Scholar]
- Abdelkareem, M.A.; Xu, L.; Ali, M.K.A.; Elagouz, A.; Mi, J.; Guo, S.J.; Liu, Y.L.; Zuo, L. Vibration energy harvesting in automotive suspension system: A detailed review. Appl. Energy 2018, 229, 672–699. [Google Scholar]
- Long, G.M.; Ding, F.; Zhang, N.; Zhang, J.; Qin, A. Regenerative active suspension system with residual energy for in-wheel motor driven electric vehicle. Appl. Energy 2020, 260, 114180. [Google Scholar] [CrossRef]
- Gu, C.; Yin, J.; Luo, J.; Chen, X.B.; Wang, J.M. Performance-oriented controls of a novel rocker-pushrod electromagnetic active vehicle suspension. Mech. Syst. Signal Process. 2018, 109, 1–14. [Google Scholar] [CrossRef]
- Zou, J.Y.; Guo, X.X.; Abdelkareem, M.A.A.; Xu, L.; Zhang, J. Modelling and ride analysis of a hydraulic interconnected suspension based on the hydraulic energy regenerative shock absorbers. Mech. Syst. Signal Process. 2019, 127, 345–369. [Google Scholar] [CrossRef]
- Zheng, P.; Gao, J.W. Damping force and energy recovery analysis of regenerative hydraulic electric suspension system under road excitation: Modelling and numerical simulation. Math. Biosci. Eng. 2019, 16, 6298–6318. [Google Scholar]
- Li, S.Y.; Xu, J.; Pu, X.H.; Tao, T.; Gao, H.N.; Mei, X.S. Energy-harvesting variable/constant damping suspension system with motor based electromagnetic damper. Energy 2019, 189, 116199. [Google Scholar] [CrossRef]
- Wei, W.; Li, Q.; Xu, F.C.; Zhang, X.Y.; Jin, J.J.; Jin, J.Q.; Sun, F. Research on an electromagnetic actuator for vibration suppression and energy regeneration. Actuators 2020, 9, 42. [Google Scholar] [CrossRef]
- Mei, X.T.; Zhou, S.X.; Yang, Z.C.; Kaizuka, T.; Nakano, K. The benefits of an asymmetric tri-stable energy harvester in low-frequency rotational motion. Appl. Phys. Express 2019, 12, 057002. [Google Scholar] [CrossRef]
- Mei, X.T.; Zhou, S.X.; Yang, Z.C.; Kaizuka, T.; Nakano, K. A tri-stable energy harvester in rotational motion: Modeling, theoretical analyses and experiments. J. Sound Vibr. 2020, 469, 115142. [Google Scholar]
- Banerjee, S.S.; Arief, I.; Berthold, R.; Wiese, M.; Bartholdt, M.; Ganguli, D.; Mitra, S.; Mandal, S.; Wallaschek, J.; Raatz, A.; et al. Super-elastic ultrasoft natural rubber-based piezoresistive sensors for active sensing interface embedded on soft robotic actuator. Appl. Mater. Today 2021, 25, 101219. [Google Scholar] [CrossRef]
- Arief, I.; Zimmermann, P.; Hait, S.; Park, H.; Ghosh, A.K.; Janke, A.; Chattopadhyay, S.; Nagel, J.; Heinrich, G.; Wiessner, S.; et al. Elastomeric microwell-based triboelectric nanogenerators by in situ simultaneous transfer-printing. Mater. Horizons 2022, 9, 1468–1478. [Google Scholar] [CrossRef]
- Liu, Y.J.; Zeng, Q.; Tong, S.C.; Chen, C.L.P.; Liu, L. Adaptive neural network control for active suspension systems with time-varying vertical displacement and speed constraints. IEEE Trans. Ind. Electron. 2019, 66, 9458–9466. [Google Scholar] [CrossRef]
- Ma, X.B.; Wong, P.K.; Zhao, J. Practical multi-objective control for automotive semi-active suspension system with nonlinear hydraulic adjustable damper. Mech. Syst. Signal Process. 2019, 117, 667–688. [Google Scholar] [CrossRef]
- Arief, I.; Mukhopadhyay, P.K. Magnetorheology in CoNi nanoplatelet-based MRFs: Effect of platelet orientation and oscillatory shear. J. Magn. Magn. Mater. 2019, 479, 326–331. [Google Scholar] [CrossRef]
- Arief, I.; Mukhopadhyay, P.K. Synthesis of dimorphic MR fluid containing NiCo nanoflowers by the polymer assisted polyol method and study of its magnetorheological properties. Phys. B 2014, 448, 73–76. [Google Scholar] [CrossRef]
- Khoshnoud, F.; Zhang, Y.C.; Shimura, R.; Shahba, A.; Jin, G.M.; Pissanidis, G.; Chen, Y.K.; De Silva, C.W. Energy regeneration from suspension dynamic modes and self-powered actuation. IEEE-ASME Trans. Mechatron. 2015, 20, 2513–2524. [Google Scholar] [CrossRef] [Green Version]
- Nakano, K.; Suda, Y.; Nakadai, S. Self-powered active vibration control using a single electric actuator. J. Sound Vibr. 2003, 260, 213–235. [Google Scholar] [CrossRef]
- Roundy, S. On the effectiveness of vibration-based energy harvesting. J. Intell. Mater. Syst. Struct. 2005, 16, 809–823. [Google Scholar] [CrossRef]
- Zuo, L.; Tang, X. Large-scale vibration energy harvesting. J. Intell. Mater. Syst. Struct. 2013, 24, 1405–1430. [Google Scholar] [CrossRef]
- Yang, X.F.; Zhao, W.T.; Liu, Y.L.; Chen, L.; Meng, X.P. Design and experimental study of the energy-regenerative circuit of a hybrid vehicle suspension. Sci. Prog. 2020, 103, 0036850419874999. [Google Scholar] [CrossRef] [Green Version]
- Kim, J.H.; Shin, Y.J.; Chun, Y.D.; Kim, J.H. Design of 100W regenerative vehicle suspension to harvest energy from road surfaces. Int. J. Precis. Eng. Manuf. 2018, 19, 1089–1096. [Google Scholar] [CrossRef]
- Arroyo, E.; Badel, A.; Formosa, F. Energy harvesting from ambient vibrations: Electromagnetic device and synchronous extraction circuit. J. Intell. Mater. Syst. Struct. 2013, 24, 2023–2035. [Google Scholar]
- Sapiński, B. Energy-harvesting linear MR damper: Prototyping and testing. Smart Mater. Struct. 2014, 23, 035021. [Google Scholar]
- Sapiński, B.; Rosół, M.; Węgrzynowski, M. Investigation of an energy harvesting MR damper in a vibration control system. Smart Mater. Struct. 2016, 25, 125017. [Google Scholar] [CrossRef]
- Zhu, X.J.; Deng, L.; Sun, S.S.; Yan, T.H.; Yu, J.Q.; Ma, Z.S.; Li, W.H. Development of a variable stiffness magnetorheological damper with self-powered generation capability. J. Intell. Mater. Syst. Struct. 2020, 31, 209–219. [Google Scholar] [CrossRef] [Green Version]
- Firoozy, P.; Ebrahimi-Nejad, S. Broadband energy harvesting from time-delayed nonlinear oscillations of magnetic levitation. J. Intell. Mater. Syst. Struct. 2020, 31, 737–755. [Google Scholar] [CrossRef]
- Zou, J.Y.; Guo, X.X.; Xu, L.; Tan, G.F.; Zhang, C.C.; Zhang, J. Design, modeling, and analysis of a novel hydraulic energy-regenerative shock absorber for vehicle suspension. Shock Vib. 2017, 2017, 3186584. [Google Scholar] [CrossRef] [Green Version]
- Wu, Z.F.; Xu, G.Z. Modeling and analysis of a hydraulic energy-harvesting shock absorber. Math. Probl. Eng. 2020, 2020, 1580297. [Google Scholar] [CrossRef]
- Chen, Y.Z.; Qin, B.N.; Guo, S.J.; Yu, L.Y.; Zuo, L. Asymmetric energy harvesting and hydraulically interconnected suspension: Modeling and validations. In Proceedings of the International Design Engineering Technical Conferences and Computers and Information in Engineering Conference, Anaheim, CA, USA, 18–21 August 2019. [Google Scholar]
- Guntur, H.L.; Hendrowati, W.; Syuhri, S.N.H. Designing hydro-magneto-electric regenerative shock absorber for vehicle suspension considering conventional-viscous shock absorber performance. J. Mech. Sci. Technol. 2020, 34, 55–67. [Google Scholar] [CrossRef]
- Bowen, L.; Viñolas, J.; Olazagoitia, J.L.; Otero, J.E. An innovative energy harvesting shock absorber system using cable transmission. IEEE-ASME Trans. Mechatron. 2019, 24, 689–699. [Google Scholar] [CrossRef]
- Salman, W.; Qi, L.F.; Zhu, X.; Pan, H.Y.; Zhang, X.T.; Bano, S.; Zhang, Z.T.; Yuan, Y.P. A high-efficiency energy regenerative shock absorber using helical gears for powering low-wattage electrical device of electric vehicles. Energy 2018, 159, 361–372. [Google Scholar] [CrossRef]
- Zhang, R.; Wang, X. Parameter study and optimization of a half-vehicle suspension system model integrated with an arm-teeth regenerative shock absorber using Taguchi method. Mech. Syst. Signal Proc. 2019, 126, 65–81. [Google Scholar]
- Zhou, R.; Sun, F.; Yan, M.Y.; Jin, J.J.; Li, Q.; Xu, F.C.; Zhang, X.Y.; Nakano, K. Design, analysis and prototyping of a magnetic energy-harvester suspension for vehicles. Smart Mater. Struct. 2020, 29, 105034. [Google Scholar] [CrossRef]
- Zhou, R.; Yan, M.Y.; Sun, F.; Jin, J.J.; Li, Q.; Xu, F.C.; Zhang, M.; Zhang, X.Y.; Nakano, K. Experimental validations of a magnetic energy-harvesting suspension and its potential application for self-powered sensing. Energy 2022, 239, 122205. [Google Scholar] [CrossRef]
- Jiang, W.K.; Song, Y.Y.; Xu, Y.M.; Zhou, R.; Sun, F.; Zhang, X.Y. Energy-harvesting characteristics of a dual-mode magnetic suspension for vehicles: Analysis and experimental verification. Actuators 2022, 11, 363. [Google Scholar]
- Wu, L.P.; Zhou, R.; Bao, J.S.; Yang, G.; Sun, F.; Xu, F.C.; Jin, J.J.; Zhang, Q.; Jiang, W.K.; Zhang, X.Y. Vehicle stability analysis under extreme operating conditions based on LQR control. Sensors 2022, 22, 9791. [Google Scholar] [CrossRef]
- Liu, Y.L.; Xu, L.; Zuo, L. Design, modeling, lab, and field tests of a mechanical-motion-rectifier-based energy harvester using a ball-screw mechanism. IEEE-ASME Trans. Mechatron. 2017, 22, 1933–1943. [Google Scholar] [CrossRef]
- Gao, Z.P.; Chen, S.Z.; Zhao, Y.Z.; Liu, Z. Numerical evaluation of compatibility between comfort and energy recovery based on energy flow mechanism inside electromagnetic active suspension. Energy 2019, 170, 521–536. [Google Scholar]
- Zuo, L.; Zhang, P.S. Energy harvesting, ride comfort, and road handling of regenerative vehicle suspensions. J. Vib. Acoust.-Trans. ASME 2013, 135, 011002. [Google Scholar] [CrossRef]

Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhou, R.; Song, Y.; Jin, J.; Xu, F.; Sun, F.; Yang, L.; Yan, M. Dynamic Performance of a Magnetic Energy-Harvesting Suspension: Analysis and Experimental Verification. Actuators 2023, 12, 308. https://doi.org/10.3390/act12080308
Zhou R, Song Y, Jin J, Xu F, Sun F, Yang L, Yan M. Dynamic Performance of a Magnetic Energy-Harvesting Suspension: Analysis and Experimental Verification. Actuators. 2023; 12(8):308. https://doi.org/10.3390/act12080308
Chicago/Turabian StyleZhou, Ran, Yuanyuan Song, Junjie Jin, Fangchao Xu, Feng Sun, Lijian Yang, and Mingyin Yan. 2023. "Dynamic Performance of a Magnetic Energy-Harvesting Suspension: Analysis and Experimental Verification" Actuators 12, no. 8: 308. https://doi.org/10.3390/act12080308
APA StyleZhou, R., Song, Y., Jin, J., Xu, F., Sun, F., Yang, L., & Yan, M. (2023). Dynamic Performance of a Magnetic Energy-Harvesting Suspension: Analysis and Experimental Verification. Actuators, 12(8), 308. https://doi.org/10.3390/act12080308