1. Introduction
Autonomous driving is a popular scenario for the application of artificial intelligence technology, and vehicle chassis control by wire is an inevitable requirement for vehicles to achieve autonomous driving [
1,
2]. The electronic mechanical brake (EMB) is considered one of the most-ideal actuators for achieving vehicle brake control by wire [
3,
4].
Compared to traditional hydraulic brakes or electronic hydraulic brakes (EHBs) [
5], it has many advantages. Firstly, the pumps, pipelines, valves, and other components of the hydraulic system have complex structures and risks of leakage, while pure mechanical transmission methods are more reliable. Secondly, the EHB’s control-by-wire action is usually on/off valves, and the control output is discrete [
6]. However, the EMB can achieve continuous adjustment, making the control execution performance superior [
7,
8].
The EMB actuators generally need to convert the rotational motion of the motor into linear motion similar to a piston cylinder to compress the friction plate onto the brake disc to achieve vehicle braking [
9]. The existing actuators include screw mechanisms [
10,
11], linkage mechanisms [
12], and cam mechanisms [
13,
14]. Besides, the brakes are installed inside the wheel rim, with very limited space, and need to withstand a few tons of force, so the existing mechanisms generally have problems such as poor load-bearing capacity, large size, and low efficiency.
The screw mechanism can be divided into the ball screw mechanism and sliding screw mechanism. The screw converts the relative rotation between the nut and the screw into relative movement through the principle of thread transmission. Balls are installed between the screw and nut of the ball screw, which convert the relative sliding into rolling, improving efficiency and reducing wear. However, compared to sliding screws, ball screws have become more complex in structure and more difficult to process and have an increased volume, but the load-bearing capacity is reduced. In addition, the lead of the ball screw is limited by the size of the ball compared to the sliding screw, resulting in a small transmission ratio and the need for a large speed-ratio-reduction mechanism. However, the application of sliding screws in the EMB is also limited due to efficiency and wear issues.
The principle of the linkage mechanism for clamping is to use the moving pair at the end of the mechanism or approximate movement with the swing of the large arm length. However, the design of the linkage mechanism itself is relatively complex, and the characteristics of the transmission are closely related to the length of the rod. It is very difficult to design ideal transmission characteristics in a limited space. Because the clamping force required is very large and the rods usually bear a bending force, the load on some kinematic pair is also very large. To ensure strength, its structural dimensions will become larger. This limits its application on the EMB.
The principle of the cam mechanism to achieve motion conversion is cam pairs. Due to the characteristic of high contact pairs, general cam mechanics are usually not used in situations with particularly high loads.
The negative radius roller cam mechanism is different from general cam mechanisms, and it has some attractive advantages for use on EMBs:
Because the contact surface between the cam and the roller is internally tangent, the negative radius roller cam mechanism has low contact stress and high bearing capacity [
15].
Because the rollers are achieved through rolling bearings, there are no relatively sliding components in the negative radius roller cam mechanism, which has higher efficiency and less wear.
In terms of design, compared to the screw and the linkage mechanism, the cam mechanism is flexible to design the transmission relationship and the size changes very little.
The traditional design of the cam mechanism is often focused on the motion law of the follower [
16,
17]. Starting from the motion law, the method of using differential geometry and other methods to analytically solve the cam profile are relatively mature [
18]. For applications that only require specific movements such as push, return, far rest, and near rest, this method can effectively solve most problems [
19]. However, in the EMB, because the input motion is arbitrary, the output motion pattern is not the most-direct design goal, and simply ensuring whether there is an impact is not enough [
20,
21]. The cam mechanism in the EMB acts as a transmission mechanism, having other design goals we need to care about [
22]. The traditional design of the cam mechanism is often focused on the motion law of the follower [
16,
17]. Starting from the motion law, the method of using differential geometry and other methods to analytically solve the cam profile are relatively mature [
18]. For applications that only require specific movements such as push, return, far rest, and near rest, this method can effectively solve most problems [
19]. However, in the EMB, because the input motion is arbitrary, the output motion pattern is not the most-direct design goal, and simply ensuring whether there is an impact is not enough [
20,
21]. The cam mechanism in the EMB acts as a transmission mechanism, having other design goals we need to care about [
22].
Considering the application scenarios of cams in complex situations such as high-speed and specific loads [
23,
24], relevant scholars have analyzed and studied the performance of cam transmission. Some scholars have studied the influence of different variable offset on the pressure angle [
25]; studied the influence of different motion laws (such as sinusoidal motion law, cycloidal motion law, 3-4-5 motion law, etc.) on contact stress [
26]; as well as the changes of the pressure angle and curvature radius under Bézier curves of different orders [
27]. These methods are all based on motion laws, which have good guiding significance for designing cam mechanisms. However, most of the above methods are the summary of the laws under the condition of controlling univariate changes, or only a part of the parameters of the cam mechanism are included, making it difficult to achieve ideal results for complex design goals.
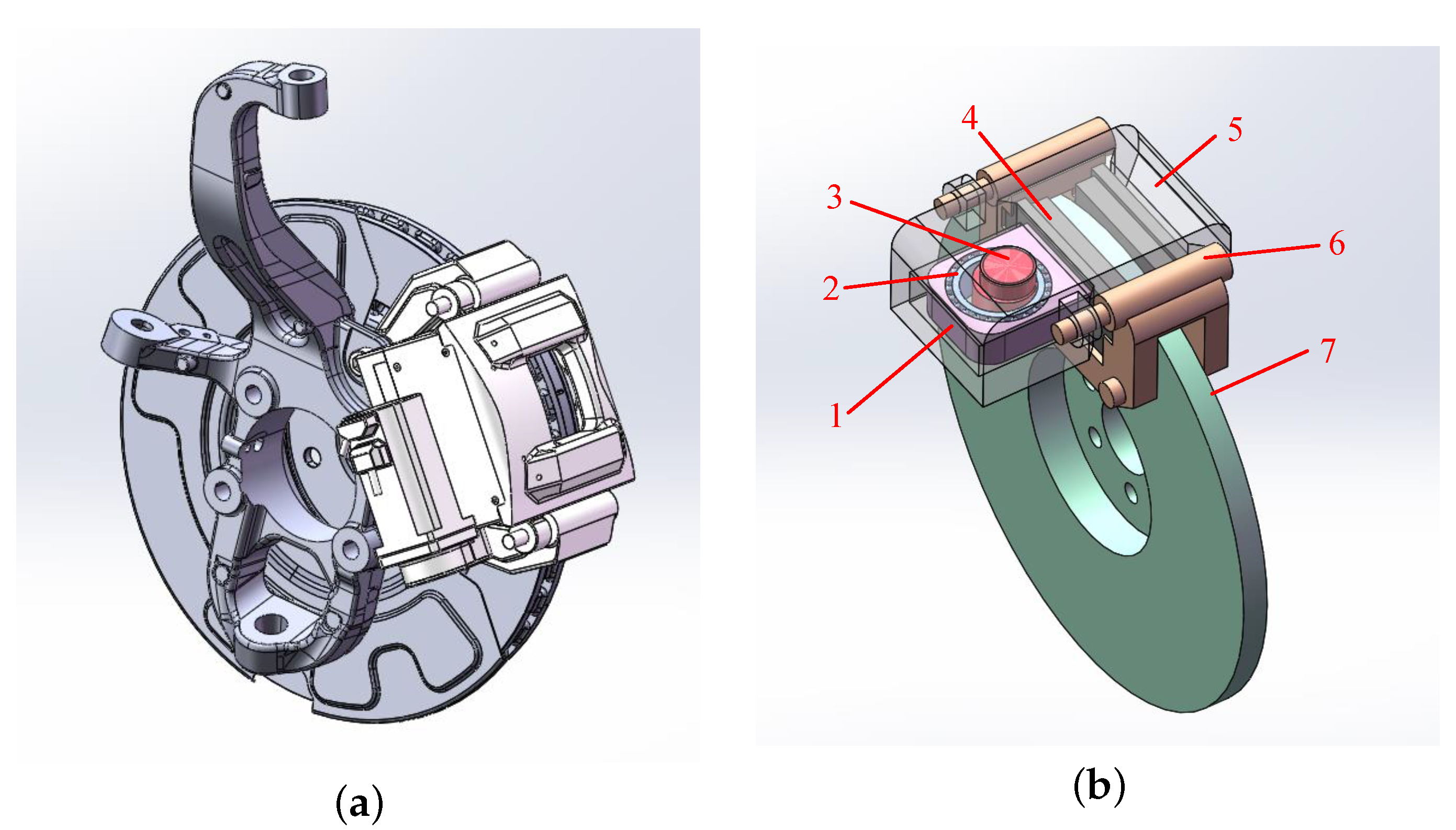
The research question in this article is to design a novel EMB. It has advantages over existing configuration of EMBs. By optimizing the design of the profile, the transmission characteristics of the cam mechanism can better comply with the EMB working conditions. The main contributions of this article include the following:
We propose a novel EMB based on negative radius roller cam mechanisms;
We propose a profile-based analysis method for negative radius roller cam mechanisms. The advantage of this method is that it can directly obtain most parameters using relatively simple expressions;
We find a set of simple and universal cam mechanism design parameters to optimize the design;
We improved the particle swarm optimization (PSO) algorithm for designing cam profiles by designing correction algorithms. The correction algorithms we propose can guide particles to meet constraints and accelerate algorithm convergence.
Section 2 of this article will elaborate the design question of the cam profiles faced by the EMB and derive the motion laws and other characteristics of negative radius roller cam mechanisms from its profile;
Section 3 provides the specific process of solving the cam profiles using improved PSO algorithm;
Section 4 discusses the results obtained using the method presented in this article and compares and verifies the design results using ADAMS.
3. Cam Design
3.1. Characteristics of Caliper Device
The caliper device is the final executing device for braking, so the mechanical characteristics of the caliper, friction plate, and brake disc will be an important basis for designing the transmission characteristics. To ensure that there is no contact between the friction plate and the brake disc during non-braking, a certain gap needs to be left between the friction plate and the brake disc [
32]. In addition, relevant studies have shown that there is a nonlinear relationship between clamping force and friction plate deformation, which can generally be fit well with cubic polynomials [
33,
34]. For convenience, this article characterizes the characteristics of the caliper device in the following form.
where
denotes the braking clearance,
denotes the deformation amount, and
K denotes the stiffness coefficient.
Furthermore, set the brake clearance mm, the maximum required clamping force kN, the stiffness coefficient kN/mm, and the maximum deformation of the caliper device mm. Therefore, the total lift required by the cam is mm, with the initial radius of the cam mm and the inner radius of the driven bearing mm.
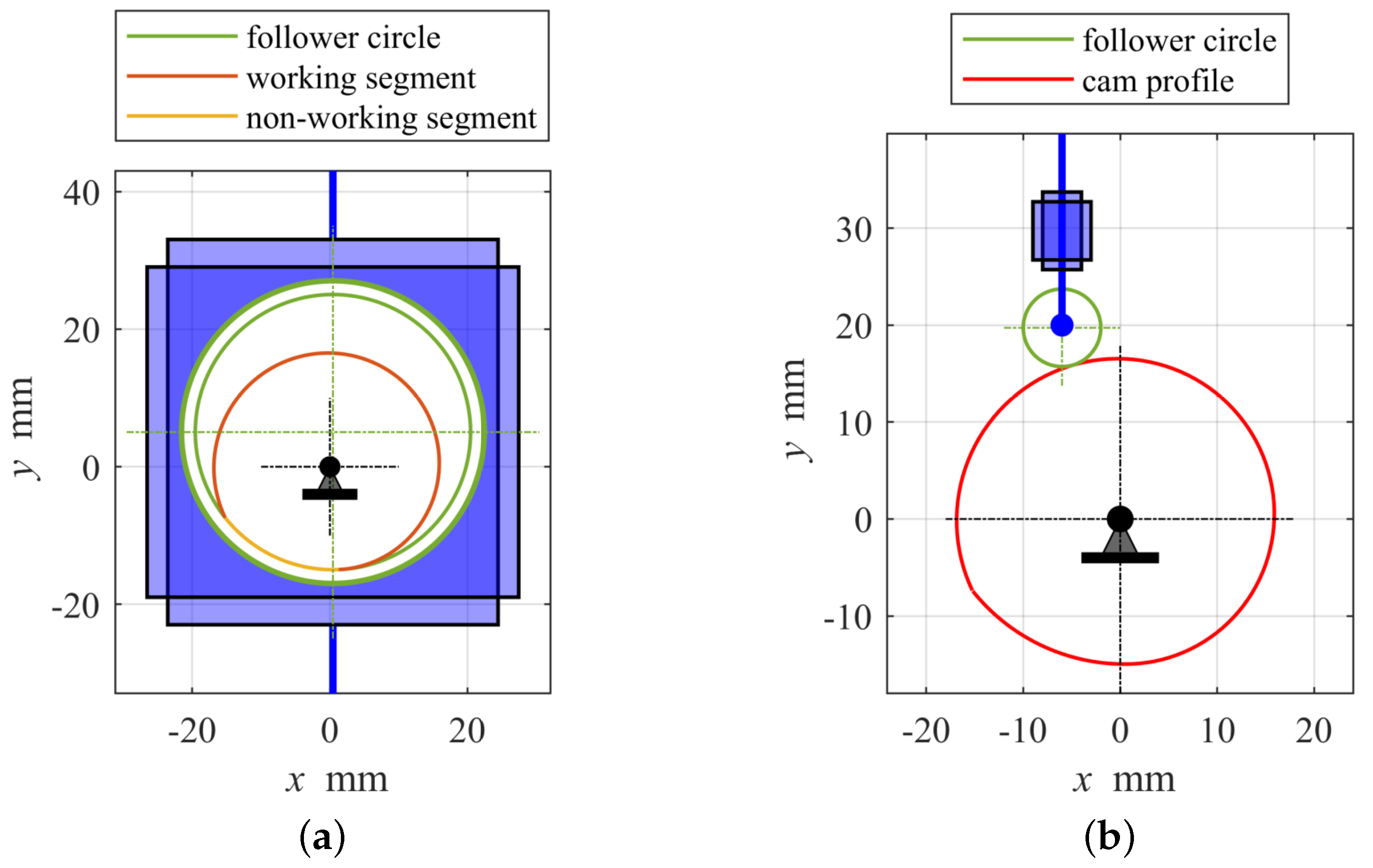
3.2. Design of Non-Working Segment Profile of Cam
The operation of the EMB is clamping to different clamping force or loosening, which is different from the common cam working process. This requires the cam to swing to a different angle rather than rotate continuously. Therefore, the cam profile in the EMB will not be used for a complete cycle. The design in this paper mainly focuses on the working segment profile. The working segment profile means that the profile can be tangent to the driven bearing in the normal working process. The profile not tangent to the driven bearing becomes the non-working segment. Determining the non-working segment is essentially a boundary constraint for the working segment. In order to enhance the strength of the camshaft as much as possible and not interfere with other parts, we selected the arc section with the same inner diameter of the driven bearing as the non-working segment. The initial position of cam rotation is the most easily interfered position. As shown in
Figure 6, blue represents the driven bearing inner ring, and red represents the polar radius of the initial and final positions.
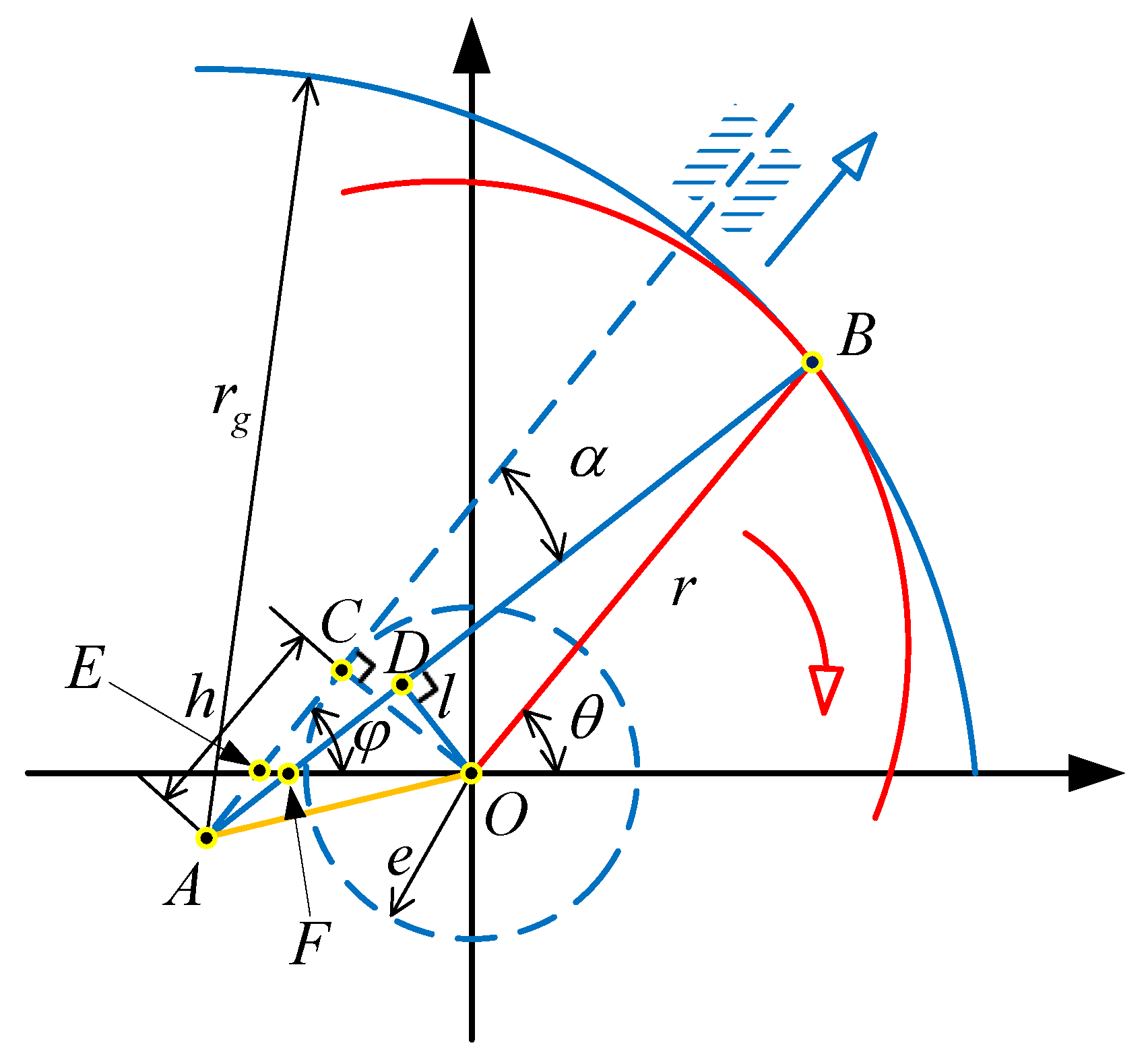
Let the initial contact position of the cam and driven inner ring be , the radius from the contact point to the rotation center of the cam be , the final contact position be , and the radius to the rotation center be . The design of the non-working segment shall ensure that it will not interfere when the cam moves. Therefore, in the initial position state, the end position with the largest radius is just on the driven circle.
Make the non-working segment profile tangent to the working segment profile at the initial position. Therefore,
The slope at the end of the initial position profile is
Obviously, the initial tangent point should be on the left side of the straight line
, and the rotation center
O cannot be outside the roller. According to the geometric relationship, the initial position tangent angle should meet the following requirements:
In addition, the initial profile angle
and the total profile angle
of the working segment need to be resolved. In
, using the cosine theorem:
Therefore, by using the cosine theorem in
and
twice, the total profile angle can be obtained as
Let
be the movement direction of the follower at the initial position, and make the vertical line
through
O vertical with respect to
, then
is the offset distance, then the initial profile angle is
With the above information, the profile of the non-working segment of the cam is determined and can also be used to calculate the boundary conditions of the working segment.
3.3. Improved PSO Algorithm Design
According to the EMB function, the working segment profile of the cam can also be divided into two parts: (1) clearance elimination section; (2) clamping force control section. Then, the design requirements of the two sections can be summarized as follows:
(1) The rotation angle of the clearance elimination section shall be small to shorten the clearance elimination time;
(2) The transition from the clearance elimination section to the clamping force control section shall be free of impact;
(3) In the clamping force control section, the nonlinear relation between the rotation angle and the driving torque shall be weak, so as to facilitate the motor to control the clamping force;
(4) In the clamping force control section, the smaller the torque required to drive the cam is, the better, that is a large gain;
(5) The contact stress at any position of the clamping force control section shall meet the requirements without stress concentration;
(6) The cam mechanism meets the design total lift requirements;
(7) The profile shall be smooth enough, and the fluctuation of curvature radius shall be small;
(8) The profile will not interfere with distortion;
(9) Minimize the pressure angle during cam driving to improve transmission efficiency.
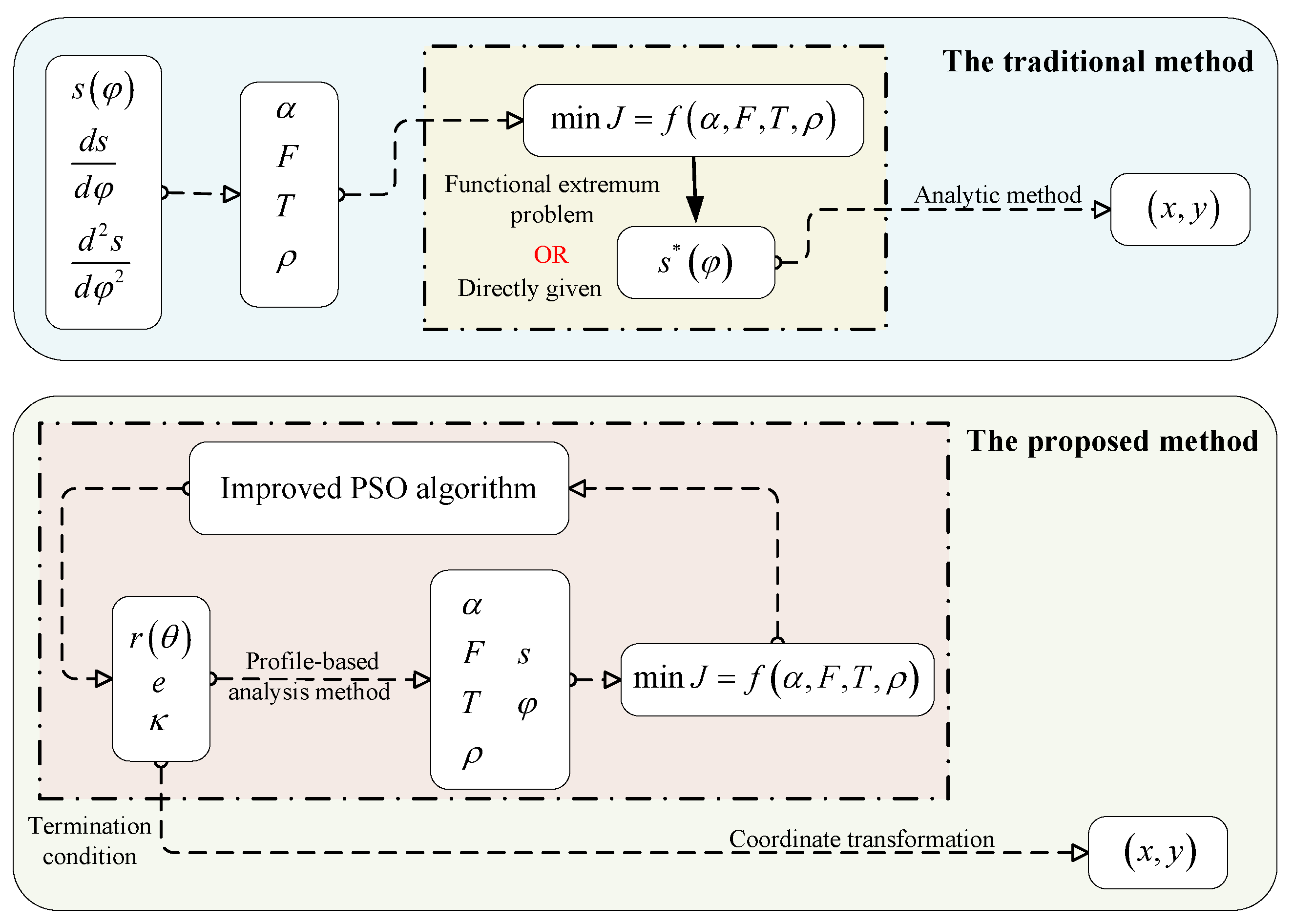
Based on the above design requirements, (1), (3), (4), (7), and (9) can be taken as the objectives of the profile design, and (2), (5), (6), and (8) are constraints. However, it is almost impossible to solve this functional extremum problem. Heuristic algorithms have been commonly used to solve such complex optimization problems in recent years, such as the genetic algorithm [
35,
36], the PSO algorithm [
37,
38], the ant colony algorithm [
39], etc. Because some indicators of the objective function are composed of discrete key points, they do not have properties such as differentiability, continuity, etc. Therefore, many gradient-based optimization algorithms are difficult to apply. The PSO algorithm does not require the aforementioned properties and is relatively easy to program and implement. Therefore, in this study, the optimal solution is solved by the PSO algorithm. The process of the profile design is shown in
Figure 7. A correction algorithm is proposed to accelerate the iterative convergence and improve the robustness of the algorithm, which is the main difference from the general PSO algorithm.
3.3.1. Design Variable
The purpose of the design variable selection is to give a complete description of the negative radius roller cam mechanism with a limited number of variables. Firstly, the coordinates describing the profile are selected in polar coordinates. The reason is that, in
Section 2.3, the expression of the profile in polar coordinates can easily obtain various performance parameters of the cam.
Secondly, we used the spline curve to approximate the theoretical optimal profile. A sufficient number of key points are interpolated with the cubic spline curve, and the profile of any shape can be approximated with sufficient accuracy theoretically. Here, it is necessary to determine the number of key points
N. Theoretically, the greater the number of key points is, the higher the accuracy of curve approximation will be, but the calculation cost will increase accordingly. More importantly, each key point cannot be completely independent. For a profile, the polar radius of adjacent key points often needs to be smooth and continuous, and the relations inside the particles will greatly affect the fitness of the particles. When the number of particles is too large, the internal freedom of the particles is too great, resulting in a very slow process of convergence to the optimal profile. To deal with this problem and improve the efficiency of the algorithm, in
Section 3.3.4, this study will put forward a correction algorithm for the particle itself as an improvement to the PSO algorithm.
Third is the boundary condition selection and connection with the non-working segment. As coordinates, the cubic spline curve can be fully constrained by two boundary conditions. Meanwhile, the working segment and non-working segment of the cam need to be well connected. In
Section 3.2, the non-working segment is designed, and they are tangentially connected at the initial position. At the final position, the working segment and the non-working segment need to be intersected. Because the cam is not allowed to cross the working segment into the non-working segment during normal operation, the tangential connection at the final position has little significance. Additionally, the distortion generated by the tangent will have an adverse impact on the motion characteristics of the final position. Therefore, the natural boundary condition is selected for the final position. In
Section 3.2, the initial and total profile angles
and
of the working segment are determined, so the critical points of the cubic spline curve can be written as
where, when
,
, the polar radius of the initial position is often given in advance in the axial strength design, so only the polar radius of the other
critical points can be determined.
Finally is the offset design. The polar radius of critical points and the initial tangent angle are able to uniquely determine the profile of the cam. However, the offset can also affect the characteristics of the cam mechanism.
Therefore, each particle can be expressed as
3.3.2. Objective Function
Firstly, the rotation angle of clearance elimination section is used as the evaluation measurement of the clearance elimination speed. The clearance elimination section cam angle only needs to inversely solve the angle when the lift equals the clearance.
Secondly, we measured the linearity of driving torque to the rotation angle. The relation curve between the driving torque and rotation angle is the load characteristic of the EMB in front of the motor. Because the stiffness curve of the caliper device is not linear, it is not beneficial to the control of the EMB. It is expected to reduce the nonlinearity of the actuator after driving through the cam mechanism. When the derivative of the driving torque to the rotation angle approaches a certain constant, the driving torque linearity is better. To obtain a more-accurate linearity, the profile is interpolated to obtain more sample points, and then, the derivative variance is used as a measure, .
Thirdly, the smaller the torque required for driving is, the better. Take the maximum value of the driving torque as the measurement.
Fourthly, the profile shall be smooth enough. Therefore, the absolute value of the curvature radius difference of adjacent key points shall be used as the measurement.
Finally, considering the transmission efficiency, it is measured by the pressure angle. The influence of the pressure angle on the transmission efficiency is represented on the cam by the lateral force generated on the follower when the cam is driven. It is more appropriate to measure the transmission efficiency with the maximum of the pressure angle tangent value
(the absolute value because the pressure angle position is distinguished by the positive and negative pressure angles in
Section 2). The transmission efficiency is close to 0 when the pressure angle is close to 90°, and
at this time. Different weights are applied to the gap-elimination section and clamping section because the forces are less on the gap-elimination section.
To sum up, the weighted convex combination of the objective functions above can obtain a comprehensive objective function.
where
are the goal weight factors.
3.3.3. Constraints
Because the cubic spline curve has a second-order continuous derivative, the whole working segment can naturally ensure continuity and no impact, so the design constraint (2) is satisfied, while other constraints can be written as
where
refers to the maximum contact stress when the cam is working,
refers to the allowable contact stress,
refers to the lift at the end of the profile, and
refers to the maximum curvature radius of the working segment profile.
The PSO algorithm cannot directly deal with the constraint, so we added the constraint into the target function in the form of a penalty function to synthesize the fitness value of the particle. The particles then move according to the fitness value to search for the optimal result.
where
g is the penalty function, and it is represented by the piecewise function:
where
is the error not meeting the constraint
, and
is the penalty factor, which is used to distinguish the constraint from the objective function. In general, it should be greater than the objective function
. There is basically no case where the constraint of the equation just meets the constraint, so this term is not required;
is used to guide particles close to the direction meeting the constraint. For the constraint of the equation, two guiding factors can be used to approach from two directions of the equation.
3.3.4. Correction
There is too much freedom when using the key point to describe the cam profile, that is there is no constraint on the relationship between the key points. This leads to two problems: (1) some particles whose parameters break through the feasible domain will cause errors in the profile solution process and lead to program crash; (2) it is very inefficient to guide particles to the optimal profile by punishment. Therefore, the internal correction measures of particles are proposed in this study to limit the internal freedom of the particles to a certain extent. The particle is forced to move to the direction meeting the constraint, so as to improve the convergence speed of the algorithm. The particle correction specifically includes the following three aspects:
(1) Correction of particle parameter range: In
Section 3.2, we give the range of the initial tangent angle as shown in Equation (
21). For the offset distance, it is obvious that it shall meet
to ensure that the initial tangent angle is not negative and the rotation center is within the driven circle. For the polar radius, it shall be ensured that the driven circle will not be interfered with in the horizontal direction and shall not be smaller than the polar radius of the critical point at the initial position,
. When the parameters in the particles exceed the above limits, they are randomly assigned again within the feasible domain.
(2) Correction between adjacent key points: The correction between adjacent key points includes three parts: one is to ensure that the curvature radius of the profile is less than the curvature radius of the roller; the other is to ensure that the polar radius increases monotonously; the third is to slow down the change rate of the polar radius.
The condition that the profile of the roller cam mechanism with a negative radius is undistorted is that the radius of curvature is less than the radius of the roller. This condition can be guided by the penalty function with very low efficiency. Therefore, the correction of adjacent key points is significant.
As shown in
Figure 8a, when the tangent angle and polar radius of the first key point are determined, to make the radius of curvature of the profile smaller than the radius of the roller, we can solve the critical case when the curvature is
. Solution
can be obtained by using the cosine theorem:
where
is the difference between the profile angles of two adjacent key points and
is shown in Equation (
22).
Then, solve
, because
, so although the known
is not the angle between
and
, the triangle has only one solution, and the solution is
As shown in
Figure 8b for subsequent key points, because the cubic spline curve must pass through the first two key points and the critical state of the curvature radius is when the three key points are on the circle with radius of
, the polar radius of the third key point shall be less than that case. The upper limit
of
can be solved according to the geometrical relationship (see the
Appendix A for details). Finally, the constraint relationship between adjacent key points can be comprehensively summarized as
Analyzing the clamping process of the EMB, it can be known that the lift of the cam always needs to be increased, so the polar radius of key point should also be monotonically increased.
When the polar radius of a key point does not meet the range constrained by Equations (
33) and (
34), the key point is reinitialized with bias. Translate the subsequent key points as shown in Equation (
35), preventing a chain reaction after reinitializing an abnormal key point and eliminate the advantageous features obtained through training.
where
represents the corrected polar radius of the key point.
The correction of curvature radius constraints is particularly important in the early stages of the algorithm. Because the initial motion amplitude and blindness of particles are large, which frequently appear, the profile cannot be solved. In the later stage of the algorithm, particle movement is more cautious and general. At this time, the constraint of the curvature radius should be relaxed to increase the degrees of freedom of particle activity, so that the particles can smoothly complete the movement and approach the optimal profile. Therefore, the correction process follows the general principle, with 100% triggering in the early stage and a gradual decrease in the probability of triggering in the later stage.
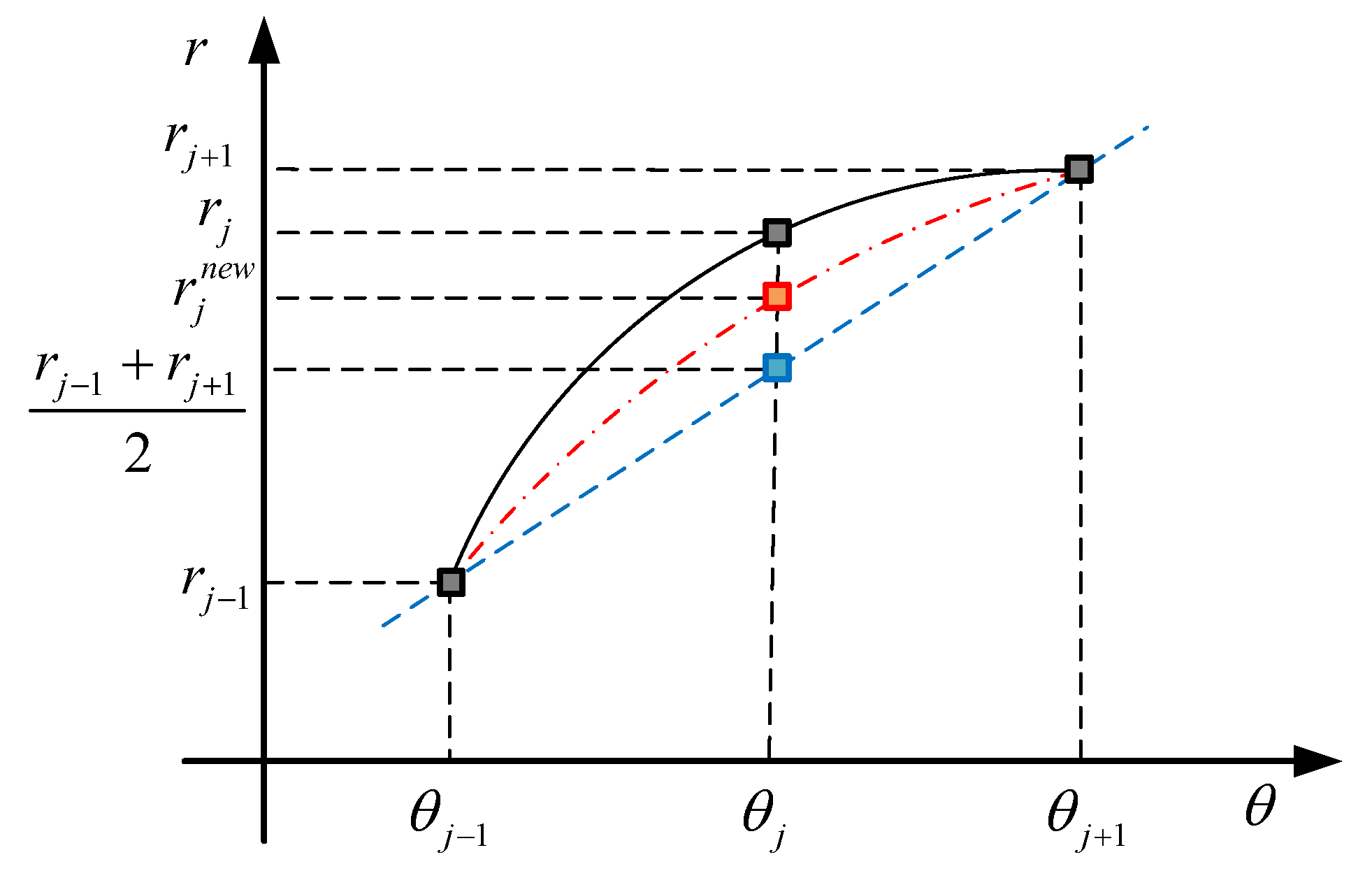
The correction of the rate of change in the polar radius of key points: The rate of change of the polar radius is related to the speed characteristics, and the greater the fluctuation of the rate of change of the polar radius, the greater the fluctuation of the speed characteristics of the cam is. Therefore, it is necessary to correct the change rate of the polar radius. As shown in
Figure 9, the black solid line represents the polar radius of the three adjacent key points before correction, as shown by the blue dashed line. When the key points in the middle position are at the midpoint of the connecting line between the two key points, the change in polar radius is equal, and the rate of change is zero. Therefore, in order to reduce the rate of change of the polar radius, the corrected polar radius is located between the two and represented by a red dotted line. The new polar radius is represented as
The correction of the rate of change of the polar radius is also based on probability. For the corrected expression of Equation (
36), repeated iterations will result in
, and ultimately, all particles will become linearly increasing polar radii. Especially, excessive corrective intervention in the later stage of the algorithm will make it difficult for particles to autonomously search for the optimal profile, so the triggering probability of the algorithm is low and gradually decreases with the iterations.
(3) Correction of global key points: There is an important equality constraint in the constraint to ensure that the total lift of the cam meets the design requirements. However, the convergence speed of the approximation equation through particle movement is relatively slow, so the correction of global key points is used to correct the particle’s approximation towards the direction that meets the total lift requirements. Considering the significant correlation between the increase in the pole radius of the cam profile and the increase in the cam lift, the ratio of the actual total lift of the current particle to the designed total lift is used to perform a stretching transformation on the pole radius of the key point, as shown in Equation (
37). Although the transformation cannot guarantee that the total lift meets the design requirements, it will make it closer. After multiple iterations, the equation constraints will be quickly approximated.
3.3.5. Location Update
The PSO algorithm [
33] simulates bird predation. Each particle will determine the size and direction of its next motion based on the position of the globally optimal particle and the optimal position it has experienced. The expected motion speed of each particle:
where
is the expected motion velocity of the
i-th particle for the
-st iteration;
and
are learning factors,
and
are random numbers, increasing search randomness;
is the historical best position of the
i-th particle;
is the global optimal position for the
k-th iteration.
At the same time, in order to avoid repeated oscillations in the initial stage of particle motion, each particle is affected by the inertia of the previous motion, and the actual motion speed is
where
is the inertia factor of motion;
is the actual motion velocity of the
i-th particle for the
k-th iteration.
As the iteration progresses, both global and individual experiences are accumulated, and particle motion becomes more cautious. In order to obtain more-accurate solutions and gradually reduce the inertia factor, this article chose a linearly decreasing inertia factor:
where
and
are the upper and lower bounds of the inertia factor,
i is the current number of iterations, and
is the maximum number of iterations.
Update the particle position after obtaining the actual motion speed:
During the iteration process, the global optimal position and corresponding fitness are recorded each time. When the set number of iterations is reached, the iteration exits and the optimal particle is extracted to obtain the profile of the cam.
5. Conclusions
This article proposes a novel type of EMB based on the native radius roller cam mechanism. To achieve the ideal characteristics of the EMB, we proposed a design method for the core component, the cam mechanism. Firstly, we propose a new analysis method for negative radius roller cams, starting from the profile. Secondly, we used the improved PSO algorithm to solve the complex multi-objective optimization problem, which is essentially a nonlinear functional extreme value problem. Then, the effectiveness of the method was demonstrated through algorithm self-validation and comparison with ADAMS simulation. Finally, we discussed the advantage of the cam EMB compared with the screw mechanism.
In the future, we will design and process a negative radius roller cam mechanism EMB and matching gap automatic adjustment devices. Besides, the native radius roller cam mechanism can not only be used in EMBs, but also in potential applications such as machine tool fixtures that require the control of the clamping force.
In addition, the profile-based analysis method has certain practical value for analyzing unknown cams, cams with machining errors, or cams with wear by only detecting the profile. It can quickly establish a cam mechanism dynamics model for simulation and other purposes.
However, the process of PSO involves a large amount of randomness, and different initial values also have a certain impact on the algorithm’s results, resulting in inconsistent final iteration results, and the optimality of the solution cannot be theoretically proven. However, the results are sufficient to prove that the application performance of cam mechanisms on EMBs can be improved by designing different profiles.


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}















