
A Mechanical Fault Diagnosis Method for UCG-Type On-Load Tap Changers in Converter Transformers Based on Multi-Feature Fusion


Abstract
1. Introduction
- (1)
- This paper focuses on the mechanical fault diagnosis of swing-arm-type (UCG-type) OLTCs, which are employed in 800 kV high-voltage DC converter transformers.
- (2)
- A multi-feature extraction method is proposed, which overcomes the shortcomings of insufficient information of a single feature, which leads to a low accuracy of fault diagnosis.
- (3)
- The feature importance evaluation based on random forest algorithm is introduced to screen the features and eliminate redundant features, so as to find the most effective feature combination, which can further improve the accuracy of fault diagnosis.
- (4)
- The parameters of LSSVM are optimized by the PSO algorithm, and a small-sample-size fault diagnosis model based on PSO-LSSVM is established, and then the model is applied to the fault diagnosis of a UCG-type OLTC; good fault diagnosis results are obtained.
2. Proposed Mechanical Fault Diagnosis Method
- (1)
- Step I: An experimental test platform for the UCG-type converter transformer OLTC is constructed. Multiple vibration sensors are used to collect OLTC vibration signals under different states.
- (2)
- Step II: Multi-dimensional feature extraction is performed on the collected OLTC vibration signals, creating a dataset of features. The random forest algorithm is used to screen the features to eliminate the influence of any redundant features.
- (3)
- Step III: An OLTC fault diagnosis model based on PSO-optimized LSSVM is established. The detailed optimization process is discussed in Section 4.2. Firstly, the number of PSO optimization iterations is preset. After each iteration, an optimal combination of hyperparameters is obtained and it is used to conduct 20 fault diagnosis tests. Consequently, the average optimal accuracy rate is calculated. Then, the optimization LSSVM model is obtained by synthesizing the results of multiple optimizations and selecting the hyperparameters corresponding to the optimal accuracy. Finally, the optimal LSSVM model is employed for OLTC mechanical fault diagnosis, yielding the diagnostic results.
3. OLTC Vibration Signal Acquisition
4. Multi-Feature Extraction Method for OLTC Vibration Signals
4.1. Statistical Feature Extraction in the Time/Frequency Domain
4.2. Singular Value Feature Extraction of Time-Frequency Matrix
4.2.1. Synchrosqueezed Wavelet Transform
4.2.2. Singular Value Decomposition Feature Extraction
4.3. Multi-Scale Mode Feature Extraction
- (1)
- Step I: Add m sets of white noise to the original sequence x to obtain a new sequence, which is given bywhere is the noise of the r-th sequence, and represents the k-th mode component of the EMD decomposition.
- (2)
- Step II: Calculate the first residual signal and mode component IMF1, which are given bywhere represents the local mean of the generated signal, and is the averaging operator.
- (3)
- Step III: Continue to add white noise to , and then find the mean value to obtain , and calculate the modal component IMF2 of the second set of residual signal , which are given by
- (4)
- Step IV: Repeat Step III to obtain the k-th residual signal and the k-th mode component, which can be obtained by
- (5)
- Step V: Return to Step IV until the residual signal can no longer be decomposed or meets the stop criterion, obtaining all mode components.
4.4. Feature Screening Based on Random Forest Algorithm
4.4.1. Construction Principles of the Random Forest Algorithm
- (1)
- Step I: Use the bootstrap method to randomly select 2H/3 of the samples from the dataset to create a training set.
- (2)
- Step II: Generate a decision tree for each training set. Randomly select M features (without repetition) as candidate features, and use these M features to determine the optimal feature that results in the best splitting effect.
- (3)
- Step III: Repeat step I and step II until k decision trees are generated.
- (4)
- Step IV: The trained random forest is used to make predictions on the testing set, and the final prediction result is determined by a voting mechanism.
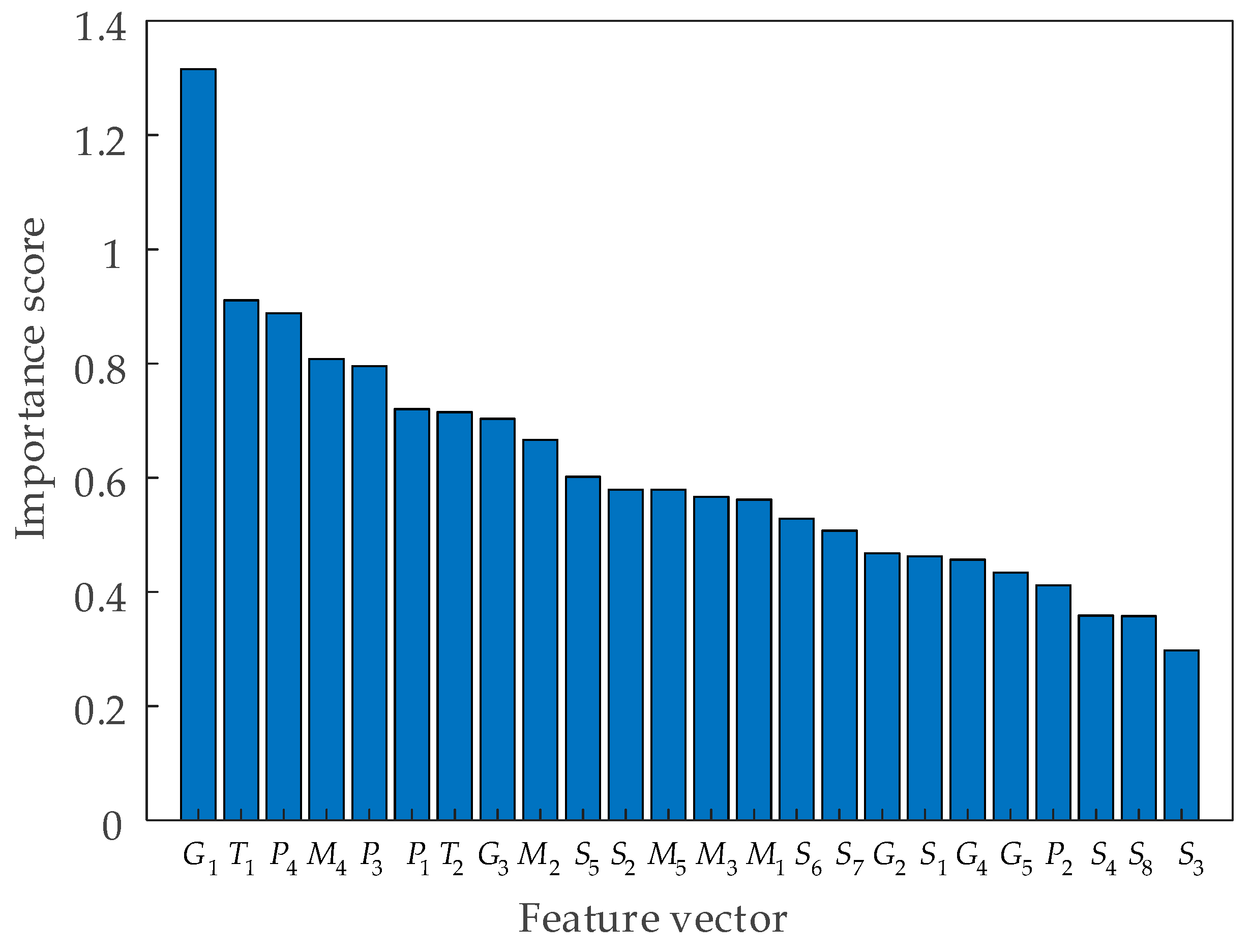
4.4.2. Feature Importance Evaluation
4.4.3. Feature Screening Process Based on the Random Forest Algorithm
- (1)
- Step I: Extract features from the UCG-type OLTC vibration signals.
- (2)
- Step II: Construct a random forest model.
- (3)
- Step III: Calculate the importance scores of the features.
- (4)
- Step IV: Based on the feature importance scores, screen features step by step according to the ranking from high to low.
5. PSO-LSSVM-Based OLTC Fault Diagnosis
5.1. LSSVM
- (1)
- Step I: By introducing Lagrange multipliers , the optimization problem can be transformed into solving a linear programming problem, thereby improving the computational efficiency. The constructed Lagrange function is given by
- (2)
- Step II: Solve the Karush–Kuhn-Tucker (KKT) conditions. The KKT conditions can be obtained by taking derivatives of in Equation (20) and setting them to zero, which are given by
- (3)
- Step III: Solve the system of linear equations. By expressing the linear equations in matrix form, the optimal and can be obtained using matrix operations.
5.2. PSO-Optimized LSSVM for OLTC Fault Diagnosis
- (1)
- Step I: Initialize the parameters of PSO. The search range for parameter c is set to [0.1, 300], and the search range for parameter g is set to [0.1, 10]. The optimization parameter dimension D is equal to 2, the maximum number of iterations is 20, and the particle swarm size N is equal to 5. The initial maximum velocity of the particle is set to 10, and its minimum velocity is set to -10. The formula for PSO is obtained from reference [43]. The initialization processes of the particle positions and velocities are given as follows:where rand(•) represents a random vector, and denote the lower and upper bounds of the problem, respectively. represents the current position of the i-th particle, and the velocity indicates the direction and rate of position changes.
- (2)
- Step II: Calculate the initial fitness value. The dataset is divided into a training set and testing set in an 8:2 ratio. The current particle is used to train the LSSVM model, and the classification accuracy of the training set is obtained. The fitness value of the particle is then calculated by using the classification error rate of the testing set, which is given by the following formula:where Accuracy refers to the classification accuracy of the testing set.
- (3)
- Step III: Update the individual optimal position of the particle. Let the current position of the particle be , and its current fitness value be . If , then update .
- (4)
- Step IV: Update the global optimal position of the particle. For each generation, find the particle with the smallest . The current global best fitness value of the particle is . If the individual optimal position of any particle , then the global optimal position is updated to .
- (5)
- Step V: Update the position and velocity of the particle. The velocity update equation for the particle is given as follows [43]:The position update formula for the particle is given as follows [43]:where and are random numbers in the range of [0, 1], and are learning factors whose value is set to 1.5, and is the inertia weight, which is set to 0.8.
- (6)
- Step VI: Repeat steps (3) to (5). When the maximum number of iterations or other stopping criteria are met, the optimal combination of parameters c and g are obtained.
- (1)
- Step I: Setting the number of optimizations.
- (2)
- Step II: Optimizing the regularization parameter c and kernel parameter g of LSSVM using PSO to obtain the optimal parameter combination for each optimization.
- (3)
- Step III: Using the optimized LSSVM parameters to perform 20 training and testing iterations, calculating and recording the average accuracy of the test set.
- (4)
- Step IV: To avoid PSO falling into local optima, the parameter combination with the highest average accuracy of LSSVM is found by the multiple optimizations, and the optimal LSSVM model is obtained.
6. Experiment and Result Analysis
6.1. Pre-Processing of OLTC Vibration Signals
6.2. Comparative Analysis of Different Feature Combinations
6.3. Feature Analysis Based on Random Forest Algorithm
6.4. Experimental Results and Comparative Analysis
7. Conclusions
- (1)
- Compared with single-dimensional features, multi-dimensional features contain more abundant fault information, and the multi-dimensional feature fusion method can significantly improve the accuracy of fault diagnosis. The accuracy of fault diagnosis can reach 97.98% by using a combination of time/frequency domain, SWT-SVD, and multi-scale modal features.
- (2)
- The redundant features in multi-dimensional features affect the accuracy of the LSSVM fault diagnosis. The random forest algorithm was used to eliminate the influence of redundant features, and the accuracy of the LSSVM fault diagnosis was further improved by 0.6%.
- (3)
- By introducing the PSO algorithm to optimize the hyperparameters of LSSVM, and comprehensively comparing multiple optimization results, the optimal hyperparameters of the LSSVM model were obtained, which effectively improved the diagnostic performance of the proposed model. Compared with the traditional SVM, CNN, LSTM, and BP neural network models, the method proposed in this paper achieved the highest accuracy of 98.58%, indicating that it can effectively identify OLTC faults.
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Cichoń, A.; Włodarz, M. OLTC Fault detection Based on Acoustic Emission and Supported by Machine Learning. Energies 2024, 17, 220. [Google Scholar] [CrossRef]
- Liu, J.; Wang, G.; Zhao, T.; Zhang, L. Fault Diagnosis of On-Load Tap-Changer Based on Variational Mode Decomposition and Relevance Vector Machine. Energies 2017, 10, 946. [Google Scholar] [CrossRef]
- Bengtsson, C. Status and trends in transformer monitoring. IEEE Trans. Power Deliv. 1996, 11, 1379–1384. [Google Scholar] [CrossRef]
- Simas, F.E.F.; de Almeida, L.A.L.; de C. Lima, A.C. Vibration monitoring of on-load tap changers using a genetic algorithm. In Proceedings of the IEEE Instrumentation & Measurement Technology Conference, Ottawa, ON, Canada, 16–19 May 2005; pp. 2288–2293. [Google Scholar]
- Bengtsson, C.; Kols, H.; Martinsson, L.; Foata, M.; Leonard, F.; Rajotte, C.; Aubin, J. Acoustic diagnosis of on tap changers. In Proceedings of the CIGRE 1996 Session, Paris, France, 21–28 August 1996. [Google Scholar]
- Yan, Y.; Ma, H.; Song, D.; Feng, Y.; Duan, D. OLTC Fault Diagnosis Method Based on Time Domain Analysis and Kernel Extreme Learning Machine. J. Comput. 2022, 33, 91–106. [Google Scholar] [CrossRef]
- Duan, R.; Wang, F. Fault diagnosis of on-load tap-changer in converter transformer based on time–frequency vibration analysis. IEEE Trans. Ind. Electron. 2016, 63, 3815–3823. [Google Scholar] [CrossRef]
- Rivas, E.; Burgos, J.C.; Garcia-Prada, J.C. Condition assessment of power OLTC by vibration analysis using wavelet transform. IEEE Trans. Power Deliv. 2009, 24, 687–694. [Google Scholar] [CrossRef]
- Kang, P.; Birtwhistle, D. Condition monitoring of power transformer on-load tap-changers. Part I: Automatic condition diagnostics. IEEE Proc.-Gener. Transm. Distrib. 2001, 148, 301–306. [Google Scholar]
- Kang, P.; Birtwhistle, D. Condition monitoring of power transformer on-load tap-changers. Part II: Detection of ageing from vibration signatures. IEEE Proc.-Gener. Transm. Distrib. 2001, 148, 307–311. [Google Scholar]
- Gao, P.; Ma, H.; Zhang, H.; Chen, K.; Wang, C. Comparison of EMD entropy and wavelet entropy in vibration signals of OLTC. Proc. CSU-EPSA 2012, 24, 48–53. (In Chinese) [Google Scholar]
- Zhang, Z.; Chen, W.; Tang, S.; Wang, Y.; Wan, F. State Feature Extraction and Anomaly Diagnosis of On-Load Tap-Changer Based on Complementary Ensemble Empirical Mode Decomposition and Local Outlier Factor. Trans. China Electrotech. Soc. 2019, 34, 4508–4518. (In Chinese) [Google Scholar]
- Qian, G.; Wang, S. Fault Diagnosis of On-Load Tap-Changer Based on the Parameter-adaptive VMD and SA-ELM. In Proceedings of the 2020 IEEE International Conference on High Voltage Engineering and Application (ICHVE), Beijing, China, 6–10 September 2020; IEEE: New York, NY, USA, 2020; pp. 1–4. [Google Scholar]
- Zhao, T.; Zhang, L.; Li, Q. Feature Analysis Methodology for Phase Portrait Structure of Mechanical Vibration Signals of On-load Tap Changers in Multidimensional Space. High Volt. Eng. 2007, 33, 102–105. (In Chinese) [Google Scholar]
- Chen, S.; Zhu, H.Y. Wavelet transform for processing power quality disturbances. EURASIP J. Adv. Signal Process. 2007, 2007, 047695. [Google Scholar] [CrossRef]
- Lian, J.; Liu, Z.; Wang, H.; Dong, X. Adaptive variational mode decomposition method for signal processing based on mode characteristic. Mech. Syst. Signal Process. 2018, 107, 53–77. [Google Scholar] [CrossRef]
- Nazari, M.; Sakhaei, S.M. Successive variational mode decomposition. Signal Process. 2020, 174, 107610. [Google Scholar] [CrossRef]
- Dong, J.; Valzania, L.; Maillard, A.; Pham, T.; Gigan, S.; Unser, M. Phase retrieval: From computational imaging to machine learning: A tutorial. IEEE Signal Process. Mag. 2023, 40, 45–57. [Google Scholar] [CrossRef]
- Jiang, C. Fault recognition of on-load tap-changer based on improved BP neural network. In Proceedings of the 2017 3rd International Conference on Computational Systems and Communications (ICCSC 2017), Tokyo, Japan, 24–26 November 2017; pp. 24–28. [Google Scholar]
- Cui, L.; Chen, Z.; Liu, D. On-load Tap Changer Fault Diagnosis Based on Improved Whale Algorithm Optimized LSTM Neural Network. In Proceedings of the 2024 IEEE 7th Advanced Information Technology, Electronic and Automation Control Conference (IAEAC), Chongqing, China, 15–17 March 2024; IEEE: New York, NY, USA, 2024; Volume 7, pp. 1085–1089. [Google Scholar]
- Dong, Y.; Zhou, H.; Sun, Y.; Liu, Q.; Wang, Y. On-Load Tap-Changer Mechanical Fault Diagnosis Method Based on CEEMDAN Sample Entropy and Improved Ensemble Probabilistic Neural Network. In Proceedings of the 2021 IEEE 4th International Electrical and Energy Conference (CIEEC), Wuhan, China, 28–30 May 2021; IEEE: New York, NY, USA, 2021; pp. 1–6. [Google Scholar]
- Liang, X.; Wang, Y.; Gu, H. A mechanical fault diagnosis model of on-load tap changer based on same-source heterogeneous data fusion. IEEE Trans. Instrum. Meas. 2021, 71, 1–9. [Google Scholar] [CrossRef]
- Han, S.; Gao, F.; Wang, B.; Liu, Y.; Wang, K.; Wu, D.; Zhang, C. Audible Sound Identification of on Load Tap Changer Based on Mel Spectrum Filtering and CNN. Power Syst. Technol. 2021, 45, 3609–3617. [Google Scholar]
- Yan, J.; Cheng, Y.; Wang, Q.; Liu, L.; Zhang, W.; Jin, B. Transformer and graph convolution-based unsupervised detection of machine anomalous sound under domain shifts. IEEE Trans. Emerg. Top. Comput. Intell. 2024, 8, 2827–2842. [Google Scholar] [CrossRef]
- Cheng, Y.; Chen, B.; Zhang, W. Enhanced spectral coherence and its application to bearing fault diagnosis. Measurement 2022, 188, 110418. [Google Scholar] [CrossRef]
- Liu, L.; Zhang, W.; Gu, F.; Song, D.; Tang, G.; Cheng, Y. An unsupervised transfer network with adaptive input and dynamic channel pruning for train axle bearing fault diagnosis. Struct. Health Monit. 2024. [Google Scholar]
- Mumuni, F.; Mumuni, A. Automated data processing and feature engineering for deep learning and big data applications: A survey. J. Inf. Intell. 2024. [Google Scholar]
- Yang, B.; Lei, Y.; Li, X.; Li, N. Targeted transfer learning through distribution barycenter medium for intelligent fault diagnosis of machines with data decentralization. Expert Syst. Appl. 2024, 244, 122997. [Google Scholar] [CrossRef]
- Yang, B.; Lei, Y.; Li, X.; Li, N. Label recovery and trajectory designable network for transfer fault diagnosis of machines with incorrect annotation. IEEE CAA J. Autom. Sin. 2024, 11, 932–945. [Google Scholar] [CrossRef]
- Castiglioni, I.; Rundo, L.; Codari, M.; Di Leo, G.; Salvatore, C.; Interlenghi, M.; Gallivanone, F.; Cozzi, A.; D’Amico, N.C.; Sardanelli, F. AI applications to medical images: From machine learning to deep learning. Phys. Medica 2021, 83, 9–24. [Google Scholar] [CrossRef] [PubMed]
- Yu, C.; Kang, M.; Chen, Y.; Wu, J.; Zhao, X. Acoustic modeling based on deep learning for low-resource speech recognition: An overview. IEEE Access 2020, 8, 163829–163843. [Google Scholar] [CrossRef]
- Zhang, C.; Mousavi, A.A.; Masri, S.F.; Gholipour, G.; Yan, K.; Li, X. Vibration feature extraction using signal processing techniques for structural health monitoring: A review. Mech. Syst. Signal Process. 2022, 177, 109175. [Google Scholar] [CrossRef]
- Dargan, S.; Kumar, M.; Ayyagari, M.R.; Kumar, G. A survey of deep learning and its applications: A new paradigm to machine learning. Arch. Comput. Methods Eng. 2020, 27, 1071–1092. [Google Scholar] [CrossRef]
- De Lange, M.; Aljundi, R.; Masana, M.; Parisot, S.; Jia, X.; Leonardis, A.; Slabaugh, G.; Tuytelaars, T. A continual learning survey: Defying forgetting in classification tasks. IEEE Trans. Pattern Anal. Mach. Intell. 2021, 44, 3366–3385. [Google Scholar]
- Gao, S.; Zhou, C.; Zhang, Z.; Geng, J.; He, R.; Yin, Q.; Xing, C. Mechanical fault diagnosis of an on-load tap changer by applying cuckoo search algorithm-based fuzzy weighted least squares support vector machine. Math. Probl. Eng. 2020, 2020, 3432409. [Google Scholar] [CrossRef]
- Marini, F.; Walczak, B. Particle swarm optimization (PSO). A tutorial. Chemom. Intell. Lab. Syst. 2015, 149, 153–165. [Google Scholar] [CrossRef]
- Lu, L.; Shan, C.; Zhou, H.; Su, Z.; Sun, H.; Li, X.; Wang, Y. Research on Multi-modal feature extraction and covolutional neural network for deterioration identification of GIS equipment. In Proceedings of the 2023 IEEE 4th China International Youth Conference on Electrical Engineering (CIYCEE), Chengdu, China, 8–10 December 2023; IEEE: New York, NY, USA, 2023; pp. 1–7. [Google Scholar]
- Daubechies, I.; Lu, J.; Wu, H.T. Synchrosqueezed wavelet transforms: An empirical mode decomposition-like tool. Appl. Comput. Harmon. Anal. 2011, 30, 243–261. [Google Scholar] [CrossRef]
- Hao, J.; Yang, Y.; Zhou, Z.; Wu, S. Fetal electrocardiogram signal extraction based on fast independent component analysis and singular value decomposition. Sensors 2022, 22, 3705. [Google Scholar] [CrossRef]
- Emeksiz, C.; Tan, M. Wind speed estimation using novelty hybrid adaptive estimation model based on decomposition and deep learning methods (ICEEMDAN-CNN). Energy 2022, 249, 123785. [Google Scholar] [CrossRef]
- Rigatti, S.J. Random forest. J. Insur. Med. 2017, 47, 31–39. [Google Scholar] [CrossRef] [PubMed]
- Lee, W.M. Python Machine Learning; John Wiley & Sons: Hoboken, NJ, USA, 2019. [Google Scholar]
- Ismail, S.; Shabri, A.; Samsudin, R. A hybrid model of self-organizing maps (SOM) and least square support vector machine (LSSVM) for time-series forecasting. Expert Syst. Appl. 2011, 38, 10574–10578. [Google Scholar] [CrossRef]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Feature | Calculation Formula | Feature | Calculation Formula |
|---|---|---|---|
| Mean | Crest Factor | ||
| Root Amplitude | Form Factor | ||
| Root Mean Square | Impulse Factor | ||
| Peak-to-Peak Value | Margin Indicator |
| Feature | Calculation Formula | Feature | Calculation Formula |
|---|---|---|---|
| Average Energy | Frequency Standard Deviation | ||
| Central Frequency | Dispersion Factor |
| Feature Name | Average Training Accuracy | Average Testing Accuracy |
|---|---|---|
| Time/Frequency Domain | 94.98 ± 3.21% | 90.11 ± 5.19% |
| SWT-SVD | 75.53 ± 3.58% | 71.72 ± 6.72% |
| Multi-Scale Modal Features | 97.85 ± 2.25% | 90.69 ± 4.71% |
| Time/Frequency Domain + SWT-SVD | 98.71 ± 0.65% | 92.35 ± 3.84% |
| Time/Frequency Domain + Multi-Scale Modal Features | 99.22 ± 0.28% | 94.01 ± 3.25% |
| SWT-SVD + Multi-Scale Modal Features | 99.18 ± 0.35% | 95.23 ± 3.57% |
| Time/Frequency Domain + SWT-SVD+ Multi-Scale Modal Features | 100.00 ± 0.00% | 97.98 ± 2.14% |
| Parameter Combination of (c, g) | AverageAccuracy | Parameter Combination of (c, g) | Average Accuracy |
|---|---|---|---|
| (286.63, 7.02) | 97.20 ± 2.08% | (154.98, 3.05) | 97.62 ± 2.28% |
| (182.83, 1.40) | 98.58 ± 1.84% | (166.75, 1.86) | 98.32 ± 1.98% |
| (189.88, 9.44) | 96.96 ± 3.17% | (142.74, 0.19) | 96.94 ± 3.34% |
| (114.21, 5.82) | 97.06 ± 2.34% | (289.86, 1.16) | 98.54 ± 2.01% |
| (290.85, 5.76) | 97.28 ± 2.21% | (293.28, 8.22) | 97.10 ± 2.23% |
| Diagnostic Model | Average Training Accuracy | Average Testing Accuracy |
|---|---|---|
| The proposed model | 100.00 ± 0.00% | 98.58 ± 1.84% |
| SVM [1] | 80.50 ± 5.18% | 80.00 ± 2.92% |
| CNN [20] | 99.58 ± 0.05% | 96.10 ± 3.12% |
| LSTM [19] | 98.75 ± 0.85% | 94.00 ± 4.58% |
| BP [18] | 98.15 ± 0.91% | 94.90 ± 3.98% |
| Diagnostic Model | Average Training Accuracy | Average Testing Accuracy | Average Training Time |
|---|---|---|---|
| The proposed model | 100.00 ± 0.00% | 95.5 ± 3.73% | 0.315 s |
| SVM | 80.00 ± 3.05% | 76.5 ± 3.21% | 0.327 s |
| CNN | 100.00 ± 0.00% | 90.0 ± 6.25% | 2.619 s |
| LSTM | 100.00 ± 0.00% | 88.0 ± 11.97% | 4.291 s |
| BP | 100.00 ± 0.00% | 86.5 ± 10.32% | 0.789 s |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Shi, Y.; Ruan, Y.; Li, L.; Zhang, B.; Yuan, K.; Luo, Z.; Huang, Y.; Xia, M.; Li, S.; Lu, S. A Mechanical Fault Diagnosis Method for UCG-Type On-Load Tap Changers in Converter Transformers Based on Multi-Feature Fusion. Actuators 2024, 13, 387. https://doi.org/10.3390/act13100387
Shi Y, Ruan Y, Li L, Zhang B, Yuan K, Luo Z, Huang Y, Xia M, Li S, Lu S. A Mechanical Fault Diagnosis Method for UCG-Type On-Load Tap Changers in Converter Transformers Based on Multi-Feature Fusion. Actuators. 2024; 13(10):387. https://doi.org/10.3390/act13100387
Chicago/Turabian StyleShi, Yanhui, Yanjun Ruan, Liangchuang Li, Bo Zhang, Kaiwen Yuan, Zhao Luo, Yichao Huang, Mao Xia, Siqi Li, and Sizhao Lu. 2024. "A Mechanical Fault Diagnosis Method for UCG-Type On-Load Tap Changers in Converter Transformers Based on Multi-Feature Fusion" Actuators 13, no. 10: 387. https://doi.org/10.3390/act13100387
APA StyleShi, Y., Ruan, Y., Li, L., Zhang, B., Yuan, K., Luo, Z., Huang, Y., Xia, M., Li, S., & Lu, S. (2024). A Mechanical Fault Diagnosis Method for UCG-Type On-Load Tap Changers in Converter Transformers Based on Multi-Feature Fusion. Actuators, 13(10), 387. https://doi.org/10.3390/act13100387