


Fast Parameter Identification of the Fractional-Order Creep Model



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
1. Introduction
2. Preliminaries
3. Problem Formulation
4. Creep Model Identification
4.1. Trust Region Reflective Algorithm
4.2. Two-Layer Trust Region Reflective Algorithm
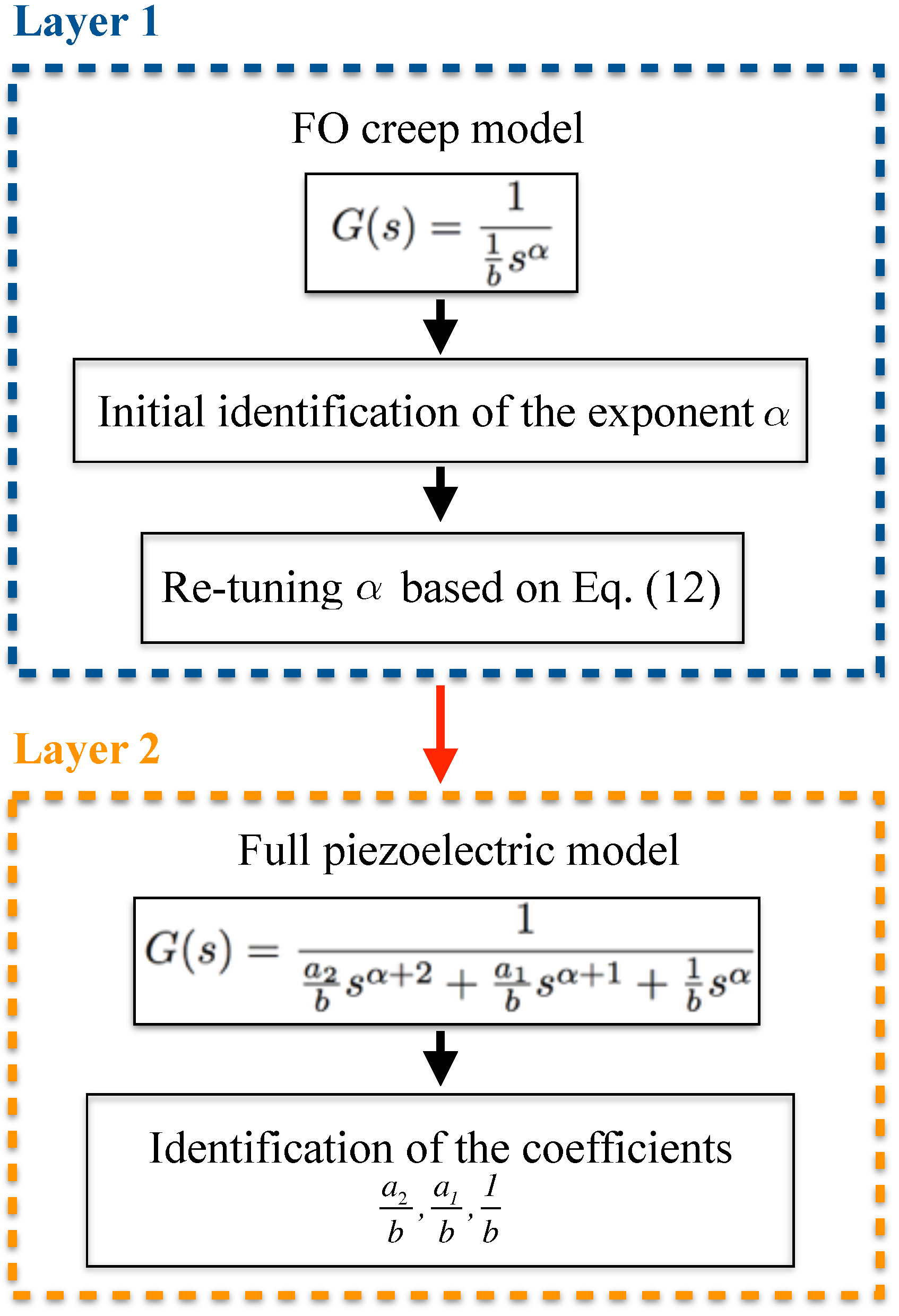
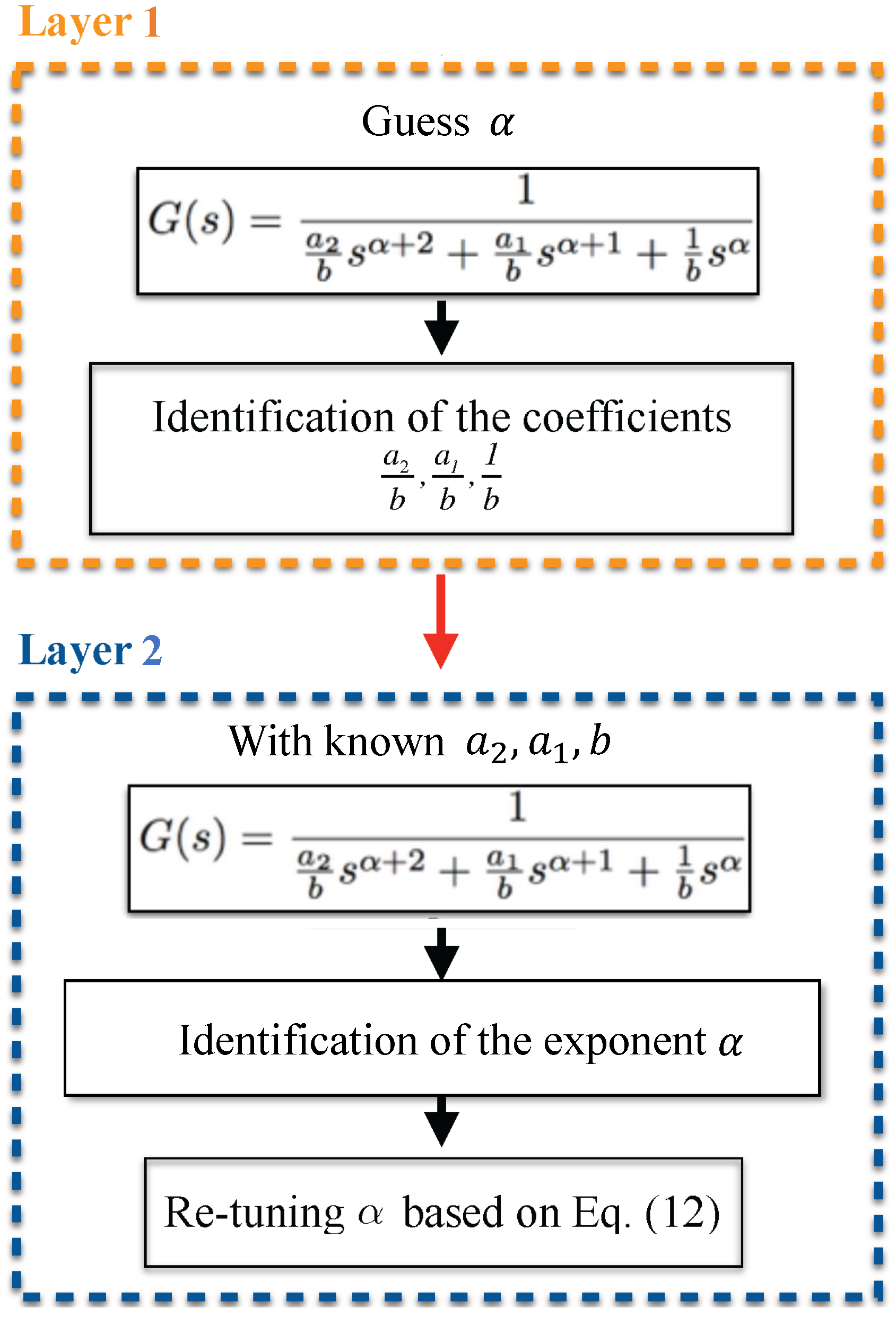
- Layer 1: The fractional-order exponent is initially identified based on the creep model in Equation (5) with its numerator fixed as 1 and considering free identification mode. In this layer, a relatively greater sampling time can be used. Note that a value is also identified for , which is disregarded as this parameter will be re-identified in the next layer. The estimated value for is then re-tuned using Equation (12) to arrive at a more accurate creep rate.
- Layer 2: integer-order coefficients and b are identified by using the determined in layer 1. Here, the sampling time should be smaller while the time frame can be selected as , with defined in Section 4. In this layer, the fix exponent mode is considered. Note that to alleviate the computational burden, the numerator can still be fixed at 1. As shown in Figure 1, with fixed exponents and numerator, the coefficients of the denominator and are identified. As the coefficient of should be 1 (see Equation (4)), all three parameters , and b are obtained.
5. Experimental Setups
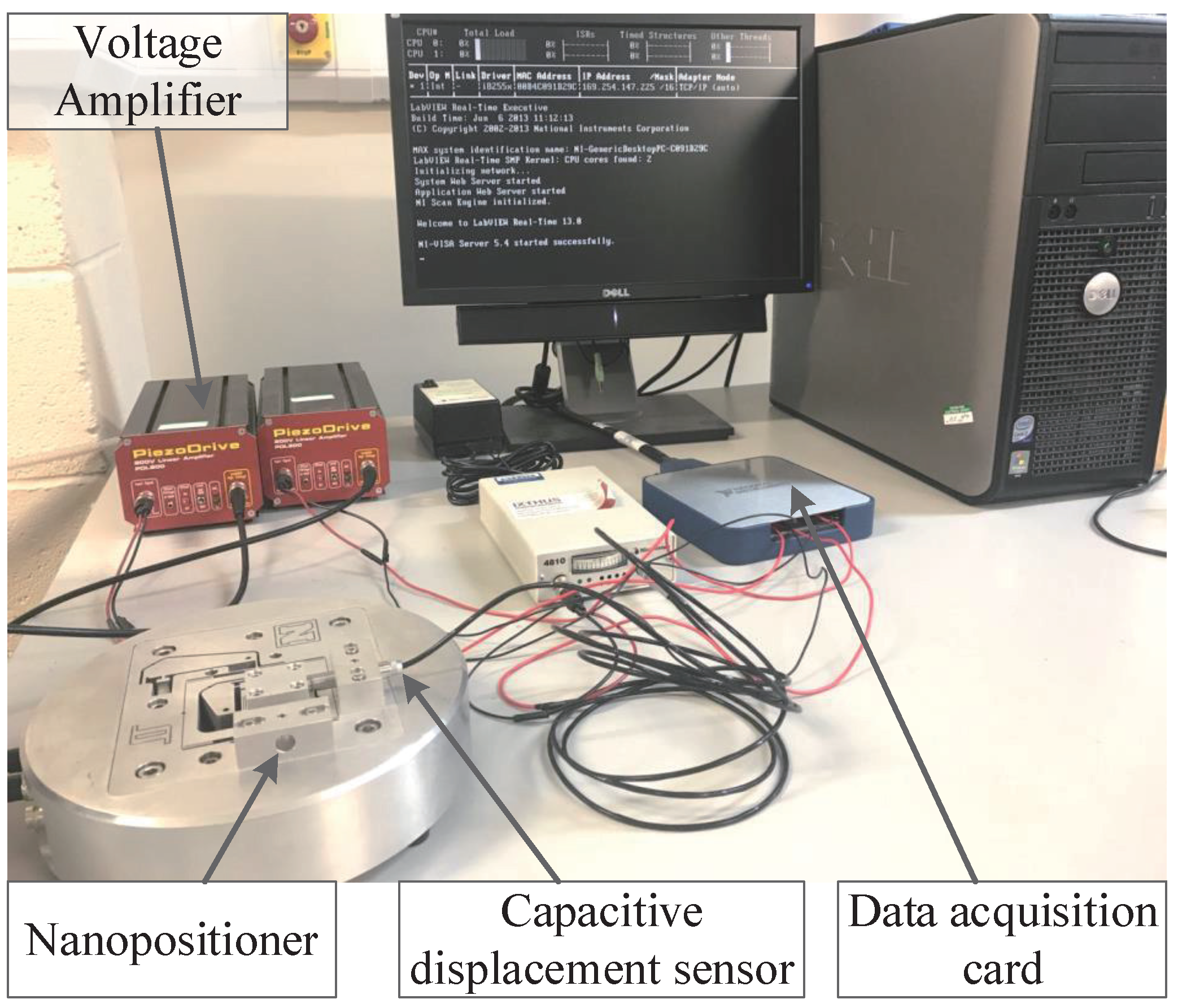
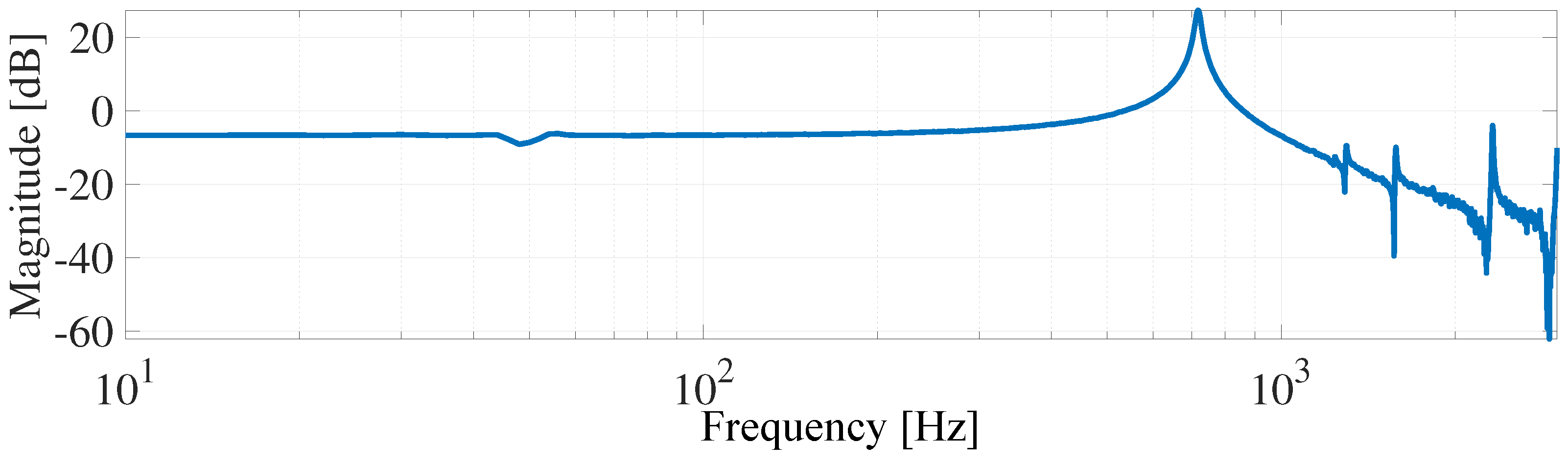
- Setup 1: A stack of piezo-actuated serial kinematic nanopositioning stage, designed by the EasyLab, University of Nevada, Reno, USA [62], is shown in Figure 3. A voltage amplifier supplies the actuation voltage in the range of 0–200 V, and the output displacement (±20 m) is measured by a high-resolution capacitive sensor in real-time [63]. Note that the experiment was conducted with an input of 0.7455 V, and the output was recorded every 0.005 s. As shown in Figure 4, the first resonant mode of the nanopositioner utilized in this paper is almost at 700 Hz. Therefore, the estimation time must be in the order of 1 ms, since, as stated in Section 4, the estimation time should be less than a period of the resonant mode frequency targeted, which provides the condition to tune the controller gains quickly enough. This figure also reveals some unmodeled dynamics that the identification approach needs to be robust against. As shown in Figure 4, there are several high-frequency resonant modes in the recorded frequency response, and the frequencies of the second and third modes are very close. Therefore, the third mode will influence the output signal and may lead to error in the system parameters identification as the system is modeled as a second-order resonant system.
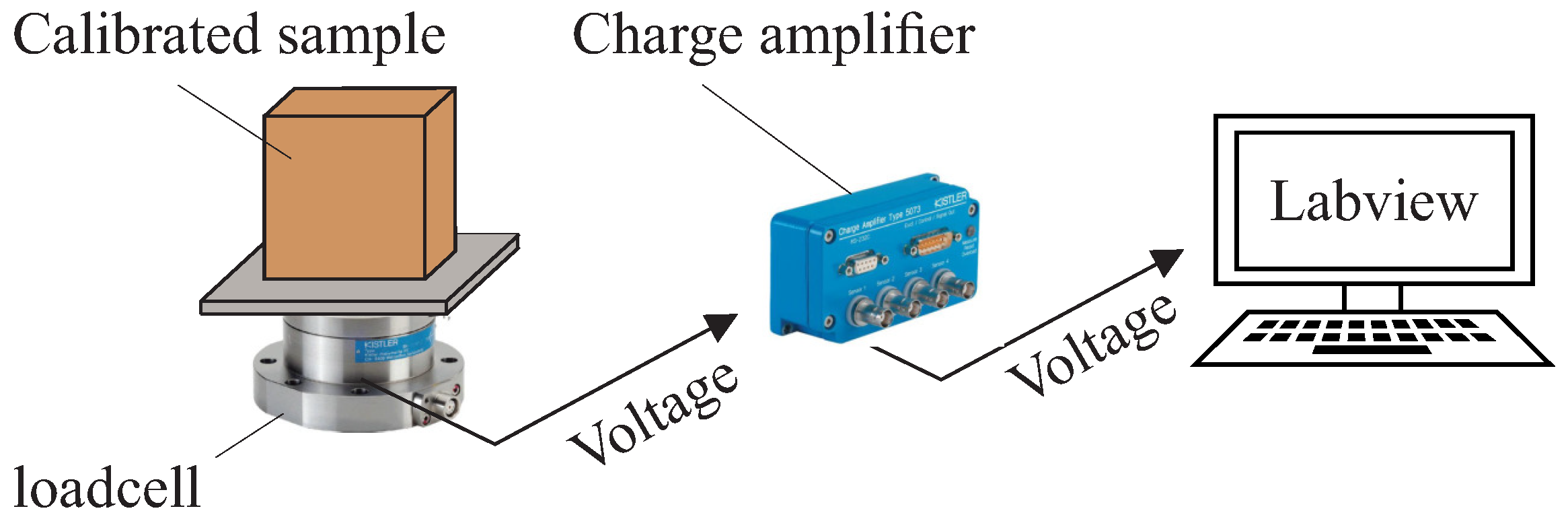
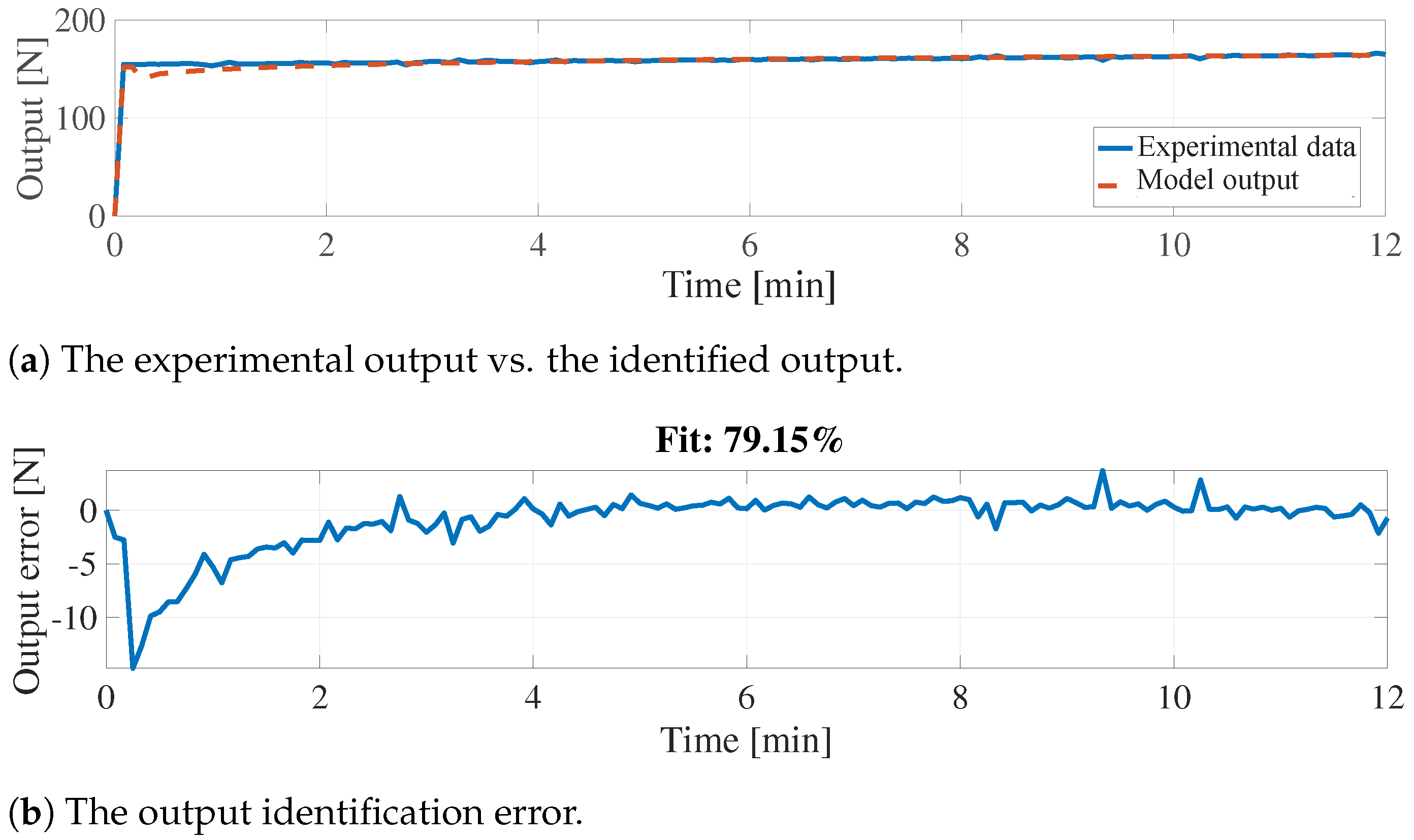
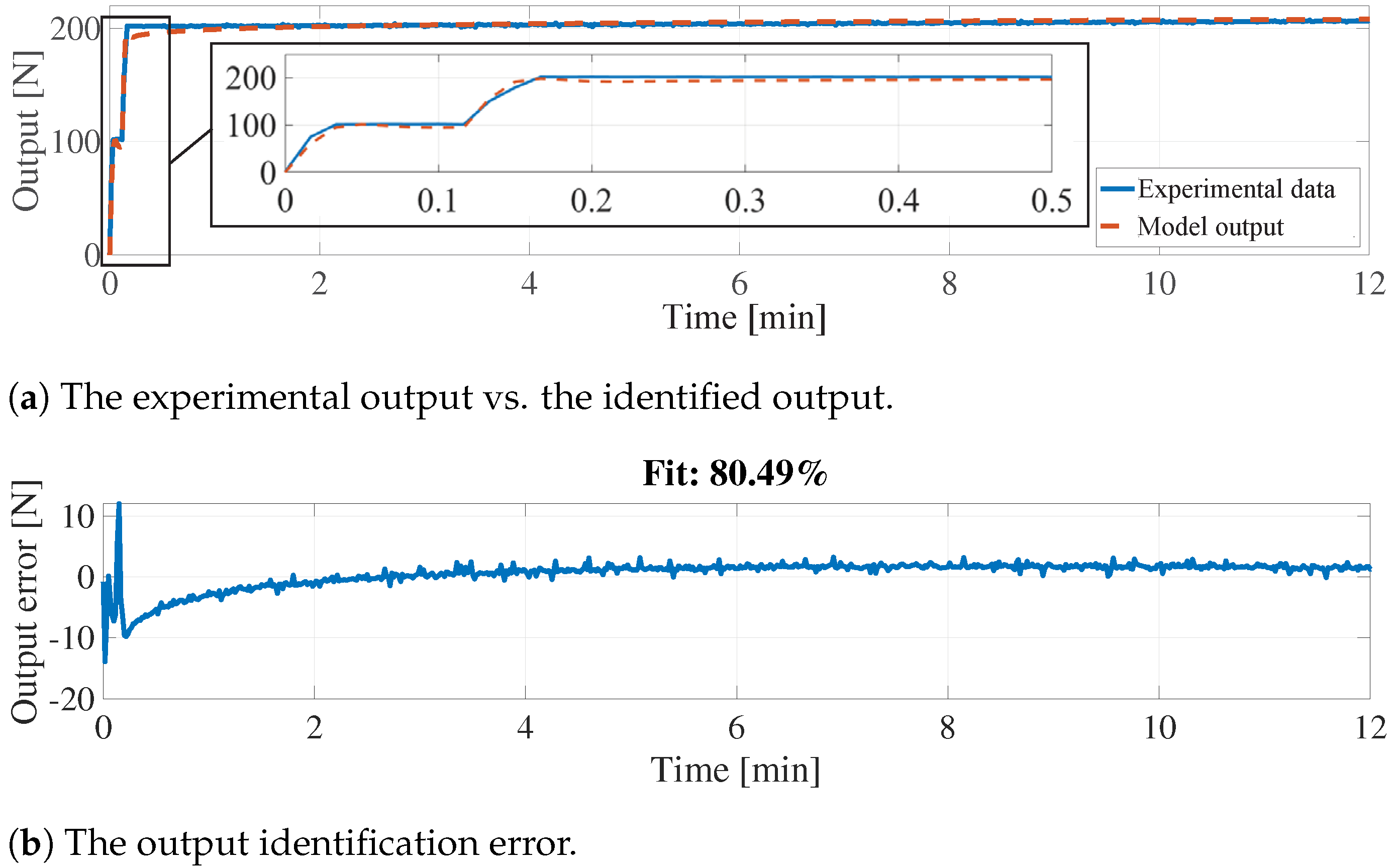
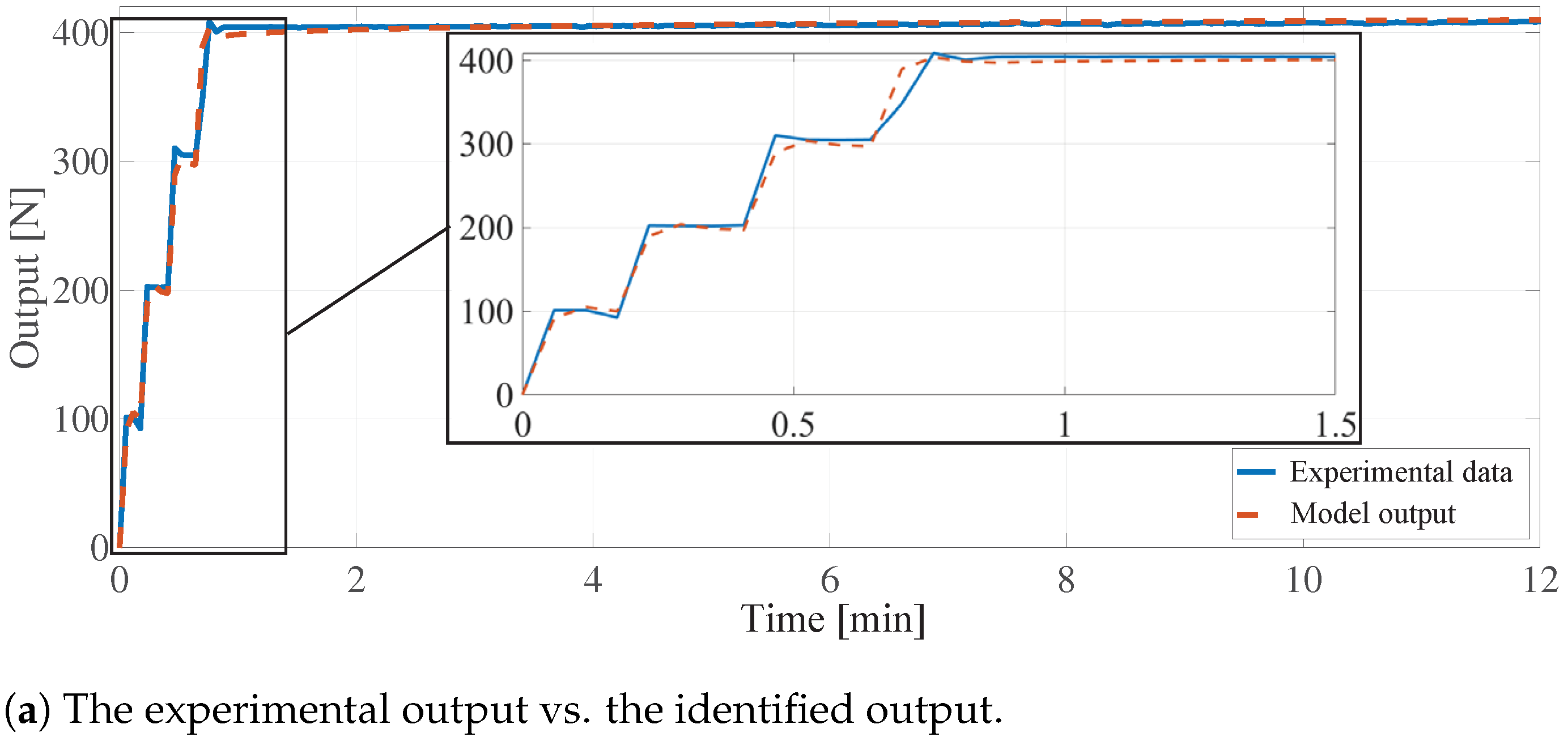
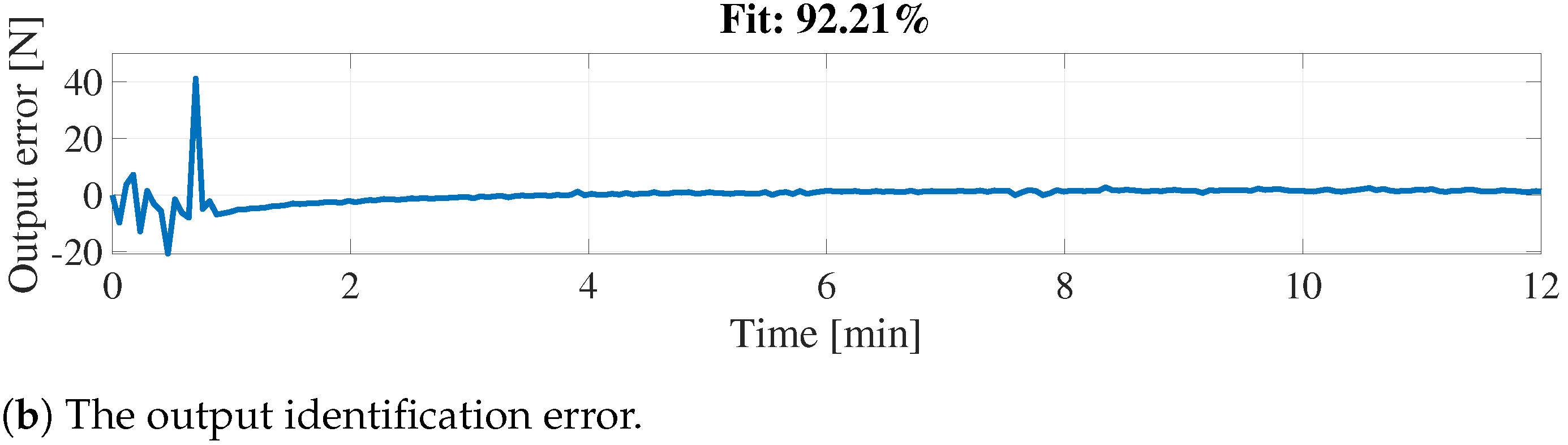
- Setup 2: Kistler 9272 four component dynamometer mounted on a vertical drill-string assembly, housed in the Drill-string Laboratory at the Centre for Applied Dynamics research (CADR), University of Aberdeen, Aberdeen, Scotland, UK [64]. A schematic of setup 2 is shown in Figure 5. This setup uses a stacked sensor configuration. The load-cell generates electric charge proportional to the measured forces and torques, relying on the principle of piezoelectricity. To convert the generated charges to corresponding voltage levels, a charge amplifier is required, for which a Kistler 5073A-type charge amplifier is utilized. Note that the experiment was conducted with different scenarios, i.e., one-step 50 N and 150 N loads, two-step 200 N input, and four-step 400 N input, and the output was recorded every 0.005 s.
6. Results and Discussion
7. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Sabarianand, D.; Karthikeyan, P.; Muthuramalingam, T. A review on control strategies for compensation of hysteresis and creep on piezoelectric actuators based micro systems. Mech. Syst. Signal Process. 2020, 140, 106634. [Google Scholar] [CrossRef]
- Yang, C.; Youcef-Toumi, K. Principle, implementation, and applications of charge control for piezo-actuated nanopositioners: A comprehensive review. Mech. Syst. Signal Process. 2022, 171, 108885. [Google Scholar] [CrossRef]
- Chen, J.; Gong, L.; Meng, R. Application of Fractional Calculus in Predicting the Temperature-Dependent Creep Behavior of Concrete. Fractal Fract. 2024, 8, 482. [Google Scholar] [CrossRef]
- Liu, Y.; Shan, J.; Qi, N. Creep modeling and identification for piezoelectric actuators based on fractional-order system. Mechatronics 2013, 23, 840–847. [Google Scholar] [CrossRef]
- El-Rifai, O.M.; Youcef-Toumi, K. Creep in piezoelectric scanners of atomic force microscopes. In Proceedings of the 2002 American Control Conference (IEEE Cat. No. CH37301), IEEE, Anchorage, AK, USA, 8–10 May 2002; Volume 5, pp. 3777–3782. [Google Scholar]
- Ge, R.; Wang, X.; Long, J.; Chen, Z.; Zhang, X. Creep modeling and control methods of piezoelectric actuators based on fractional order theory. In Proceedings of the Sixth International Conference on Electromechanical Control Technology and Transportation (ICECTT 2021), Chongqing, China, 14–16 May 2021; SPIE: San Francisco, CA, USA, 2022; Volume 12081, pp. 71–80. [Google Scholar]
- Voda, A.; Charef, A.; Idiou, D.; Machado, M.M.P. Creep modeling for piezoelectric actuators using fractional order system of commensurate order. In Proceedings of the 2017 21st International Conference on System Theory, Control and Computing (ICSTCC), IEEE, Sinaia, Romania, 19–21 October 2017; pp. 120–125. [Google Scholar]
- Tominaga, K.; Hamai, K.; Gupta, B.; Kudoh, Y.; Takashima, W.; Prakash, R.; Kaneto, K. Suppression of electrochemical creep by cross-link in polypyrrole soft actuators. Phys. Procedia 2011, 14, 143–146. [Google Scholar] [CrossRef]
- Gu, G.Y.; Gupta, U.; Zhu, J.; Zhu, L.M.; Zhu, X. Modeling of viscoelastic electromechanical behavior in a soft dielectric elastomer actuator. IEEE Trans. Robot. 2017, 33, 1263–1271. [Google Scholar] [CrossRef]
- Pesotski, D.; Janocha, H.; Kuhnen, K. Adaptive compensation of hysteretic and creep non-linearities in solid-state actuators. J. Intell. Mater. Syst. Struct. 2010, 21, 1437–1446. [Google Scholar] [CrossRef]
- Yang, Q.; Jagannathan, S. Creep and hysteresis compensation for nanomanipulation using atomic force microscope. Asian J. Control 2009, 11, 182–187. [Google Scholar] [CrossRef]
- Panja, P. Dynamics of a fractional order predator-prey model with intraguild predation. Int. J. Model. Simul. 2019, 39, 256–268. [Google Scholar] [CrossRef]
- Deressa, C.T.; Duressa, G.F. Investigation of the dynamics of COVID-19 with SEIHR nonsingular and nonlocal kernel fractional model. Int. J. Model. Simul. 2022, 42, 1030–1048. [Google Scholar] [CrossRef]
- Qureshi, S.; Abro, K.A.; Gómez-Aguilar, J. On the numerical study of fractional and non-fractional model of nonlinear Duffing oscillator: A comparison of integer and non-integer order approaches. Int. J. Model. Simul. 2022, 43, 362–375. [Google Scholar] [CrossRef]
- Xu, Y.; Luo, Y.; Luo, X.; Chen, Y.; Liu, W. Fractional-Order Modeling of Piezoelectric Actuators with Coupled Hysteresis and Creep Effects. Fractal Fract. 2023, 8, 3. [Google Scholar] [CrossRef]
- Li, J.; Hu, B.; Sheng, J.; Huang, L. A Fractional-Order Creep-Damage Model for Carbonaceous Shale Describing Coupled Damage Caused by Rainfall and Blasting. Fractal Fract. 2024, 8, 459. [Google Scholar] [CrossRef]
- Chen, Y.; Petras, I.; Xue, D. Fractional order control-a tutorial. In Proceedings of the 2009 American Control Conference, IEEE, St. Louis, MO, USA, 10–12 June 2009; pp. 1397–1411. [Google Scholar]
- Shahri, E.S.A.; Alfi, A.; Tenreiro Machado, J. Stabilization of fractional-order systems subject to saturation element using fractional dynamic output feedback sliding mode control. J. Comput. Nonlinear Dyn. 2017, 12, 031014. [Google Scholar] [CrossRef]
- Delavari, H.; Heydarinejad, H. Fractional-order backstepping sliding-mode control based on fractional-order nonlinear disturbance observer. J. Comput. Nonlinear Dyn. 2018, 13, 111009. [Google Scholar] [CrossRef]
- Muñoz-Vázquez, A.J.; Parra-Vega, V.; Sánchez-Orta, A. Fractional-Order Nonlinear Disturbance Observer Based Control of Fractional-Order Systems. J. Comput. Nonlinear Dyn. 2018, 13, 071007. [Google Scholar] [CrossRef]
- Muñoz-Vázquez, A.J.; Martínez-Reyes, F. Output feedback fractional integral sliding mode control of robotic manipulators. J. Comput. Nonlinear Dyn. 2019, 14, 054502. [Google Scholar] [CrossRef]
- Soukkou, A.; Soukkou, Y.; Haddad, S.; Benghanem, M.; Rabhi, A. Finite-Time Synchronization of Fractional-Order Energy Resources Demand-Supply Hyperchaotic Systems Via Fractional-Order Prediction-Based Feedback Control Strategy with Bio-Inspired Multiobjective Optimization. J. Comput. Nonlinear Dyn. 2023, 18, 031003. [Google Scholar] [CrossRef]
- Muñoz-Vázquez, A.J.; Treesatayapun, C. Discrete-Time Adaptive Fractional Nonlinear Control Using Fuzzy Rules Emulating Networks. J. Comput. Nonlinear Dyn. 2023, 18, 071002. [Google Scholar] [CrossRef]
- San-Millan, A.; Feliu-Batlle, V.; Aphale, S.S. Fractional order implementation of Integral Resonant Control–A nanopositioning application. ISA Trans. 2018, 82, 223–231. [Google Scholar] [CrossRef]
- Conejero, J.A.; Franceschi, J.; Picó-Marco, E. Fractional vs. ordinary control systems: What does the fractional derivative provide? Mathematics 2022, 10, 2719. [Google Scholar] [CrossRef]
- Liu, Y.; Shan, J.; Gabbert, U.; Qi, N. Hysteresis and creep modeling and compensation for a piezoelectric actuator using a fractional-order Maxwell resistive capacitor approach. Smart Mater. Struct. 2013, 22, 115020. [Google Scholar] [CrossRef]
- Liu, L.; Yun, H.; Li, Q.; Ma, X.; Chen, S.L.; Shen, J. Fractional order based modeling and identification of coupled creep and hysteresis effects in piezoelectric actuators. IEEE/ASME Trans. Mechatron. 2020, 25, 1036–1044. [Google Scholar] [CrossRef]
- Tashakori, S.; Vaziri, V.; Aphale, S.S. A comparative quantification of existing creep models for piezoactuators. In Proceedings of the 10th International Conference on Wave Mechanics and Vibrations, WMVC2022, Lisbon, Portugal, 4–6 July 2022; Springer: Cham, Switzerland, 2022. [Google Scholar]
- Le Lay, L. Identification Fréquentielle et Temporelle par Modèle non Entier. Ph.D. Thesis, University of Bordeaux, Bordeaux, France, 1998. Available online: http://www.theses.fr/1998BOR10605 (accessed on 27 October 2024).
- Malti, R.; Aoun, M.; Sabatier, J.; Oustaloup, A. Tutorial on system identification using fractional differentiation models. IFAC Proc. Vol. 2006, 39, 606–611. [Google Scholar] [CrossRef]
- Malti, R.; Victor, S.p.; Nicolas, O.; Oustaloup, A. System identification using fractional models: State of the art. In Proceedings of the International Design Engineering Technical Conferences and Computers and Information in Engineering Conference, Las Vegas, NV, USA, 4–7 September 2007; Volume 4806, pp. 295–304. [Google Scholar]
- Malti, R.; Victor, S.; Oustaloup, A. Advances in system identification using fractional models. J. Comput. Nonlinear Dyn. 2008, 3. [Google Scholar] [CrossRef]
- Gupta, R.; Gairola, S.; Diwiedi, S. Fractional order system identification and controller design using PSO. In Proceedings of the 2014 Innovative Applications of Computational Intelligence on Power, Energy and Controls with their impact on Humanity (CIPECH) IEEE, Ghaziabad, India, 28–29 November 2014; pp. 149–153. [Google Scholar]
- Liu, L.; Shan, L.; Jiang, C.; Dai, Y.; Liu, C.; Qi, Z. Parameter identification of the fractional-order systems based on a modified PSO algorithm. J. Southeast Univ. (Engl. Ed.) 2018, 34, 6–14. [Google Scholar]
- Zhou, S.; Cao, J.; Chen, Y. Genetic algorithm-based identification of fractional-order systems. Entropy 2013, 15, 1624–1642. [Google Scholar] [CrossRef]
- Zhang, L.; Chen, Y.; Sun, R.; Jing, S.; Yang, B. A task scheduling algorithm based on PSO for grid computing. Int. J. Comput. Intell. Res. 2008, 4, 37–43. [Google Scholar] [CrossRef]
- Oustaloup, A.; Melchior, P.; Lanusse, P.; Cois, O.; Dancla, F. The CRONE toolbox for Matlab. In Proceedings of the CACSD, Conference Proceedings-IEEE International Symposium on Computer-Aided Control System Design (Cat. No. 00TH8537) IEEE, Anchorage, AK, USA, 25–27 September 2000; pp. 190–195. [Google Scholar]
- Valerio, D.; Da Costa, J.S. Ninteger: A non-integer control toolbox for MatLab. In Proceedings of the Fractional Differentiation and Its Applications; ENSEIRB: Bordeaux, France, 2004. [Google Scholar]
- Tepljakov, A.; Petlenkov, E.; Belikov, J. FOMCON: A MATLAB toolbox for fractional-order system identification and control. Int. J. Microelectron. Comput. Sci. 2011, 2, 51–62. [Google Scholar]
- Xue, D.; Chen, Y.; Atherton, D.P. Linear Feedback Control: Analysis and Design with MATLAB; SIAM: Philadelphia, PA, USA, 2007. [Google Scholar]
- Jumarie, G. Modified Riemann–Liouville derivative and fractional Taylor series of nondifferentiable functions further results. Comput. Math. Appl. 2006, 51, 1367–1376. [Google Scholar] [CrossRef]
- Atangana, A.; Gómez-Aguilar, J. Numerical approximation of Riemann–Liouville definition of fractional derivative: From Riemann–Liouville to Atangana-Baleanu. Numer. Methods Partial. Differ. Equ. 2018, 34, 1502–1523. [Google Scholar] [CrossRef]
- Scherer, R.; Kalla, S.L.; Tang, Y.; Huang, J. The Grünwald–Letnikov method for fractional differential equations. Comput. Math. Appl. 2011, 62, 902–917. [Google Scholar] [CrossRef]
- Ortigueira, M.D.; Machado, J.T. What is a fractional derivative? J. Comput. Phys. 2015, 293, 4–13. [Google Scholar] [CrossRef]
- Tepljakov, A. FOMCON: Fractional-order modeling and control toolbox. In Fractional-Order Modeling and Control of Dynamic Systems; Springer: Cham, Switzerland, 2017; pp. 107–129. [Google Scholar]
- Sabatier, J.; Farges, C. Initial value problems should not be associated with fractional model descriptions whatever the derivative definition used. AIMS Math 2021, 6, 11318–11329. [Google Scholar] [CrossRef]
- Kilbas, A.A.; Srivastava, H.M.; Trujillo, J.J. Theory and Applications of Fractional Differential Equations; Springer: Cham, Switzerland, 2006; Volume 204. [Google Scholar]
- Monje, C.A.; Chen, Y.; Vinagre, B.M.; Xue, D.; Feliu-Batlle, V. Fractional-Order Systems and Controls: Fundamentals and Applications; Springer Science & Business Media: Cham, Switzerland, 2010. [Google Scholar]
- Yuan, Z.; Zhou, S.; Zhang, Z.; Xiao, Z.; Hong, C.; Chen, X.; Zeng, L.; Li, X. Piezo-actuated smart mechatronic systems: Nonlinear modeling, identification, and control. Mech. Syst. Signal Process. 2024, 221, 111715. [Google Scholar] [CrossRef]
- Salapaka, S.; Sebastian, A.; Cleveland, J.P.; Salapaka, M.V. High bandwidth nano-positioner: A robust control approach. Rev. Sci. Instrum. 2002, 73, 3232–3241. [Google Scholar] [CrossRef]
- Mohammadzaheri, M.; Grainger, S.; Bazghaleh, M. A system identification approach to the characterization and control of a piezoelectric tube actuator. Smart Mater. Struct. 2013, 22, 105022. [Google Scholar] [CrossRef]
- Moore, S.I.; Yong, Y.K.; Omidbeike, M.; Fleming, A.J. Serial-kinematic monolithic nanopositioner with in-plane bender actuators. Mechatronics 2021, 75, 102541. [Google Scholar] [CrossRef]
- Aphale, S.; Fleming, A.J.; Moheimani, S. High speed nano-scale positioning using a piezoelectric tube actuator with active shunt control. Micro Nano Lett. 2007, 2, 9–12. [Google Scholar] [CrossRef]
- Kuiper, S.; Schitter, G. Active damping of a piezoelectric tube scanner using self-sensing piezo actuation. Mechatronics 2010, 20, 656–665. [Google Scholar] [CrossRef]
- Fleming, A.J.; Moheimani, S.R. Sensorless vibration suppression and scan compensation for piezoelectric tube nanopositioners. IEEE Trans. Control Syst. Technol. 2005, 14, 33–44. [Google Scholar] [CrossRef]
- Das, S. Functional Fractional Calculus; Springer: Berlin/Heidelberg, Germany, 2011; Volume 1. [Google Scholar]
- Chen, Y.; Petras, I.; Vinagre, B. A List of Laplace and Inverse Laplace Transforms Related to Fractional Order Calculus. 2001. Available online: http://people.tuke.sk/ivo.petras/foclaplace.pdf (accessed on 30 November 2001).
- Bellavia, S.; Gratton, S.; Riccietti, E. A Levenberg–Marquardt method for large nonlinear least-squares problems with dynamic accuracy in functions and gradients. Numer. Math. 2018, 140, 791–825. [Google Scholar] [CrossRef]
- Gavin, H.P. The Levenberg–Marquardt Algorithm for Nonlinear Least Squares Curve-Fitting Problems; Department of Civil and Environmental Engineering, Duke University: Durham, NC, USA, 2019; Volume 19. [Google Scholar]
- Le, T.M.; Fatahi, B.; Khabbaz, H.; Sun, W. Numerical optimization applying trust-region reflective least squares algorithm with constraints to optimize the non-linear creep parameters of soft soil. Appl. Math. Model. 2017, 41, 236–256. [Google Scholar] [CrossRef]
- Ahsan, M.; Choudhry, M.A. System identification of an airship using trust region reflective least squares algorithm. Int. J. Control Autom. Syst. 2017, 15, 1384–1393. [Google Scholar] [CrossRef]
- Fairbairn, M.W.; Moheimani, S.R. Control techniques for increasing the scan speed and minimizing image artifacts in tapping-mode atomic force microscopy: Toward video-rate nanoscale imaging. IEEE Control Syst. Mag. 2013, 33, 46–67. [Google Scholar]
- Babarinde, A.K.; Li, L.; Zhu, L.; Aphale, S.S. Experimental validation of the simultaneous damping and tracking controller design strategy for high-bandwidth nanopositioning—A PAVPF approach. IET Control Theory Appl. 2020, 14, 3506–3514. [Google Scholar] [CrossRef]
- Vaziri, V.; Oladunjoye, I.O.; Kapitaniak, M.; Aphale, S.S.; Wiercigroch, M. Parametric analysis of a sliding-mode controller to suppress drill-string stick-slip vibration. Meccanica 2020, 55, 2475–2492. [Google Scholar] [CrossRef]

Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Tashakori, S.; San-Millan, A.; Vaziri, V.; Aphale, S.S. Fast Parameter Identification of the Fractional-Order Creep Model. Actuators 2024, 13, 534. https://doi.org/10.3390/act13120534
Tashakori S, San-Millan A, Vaziri V, Aphale SS. Fast Parameter Identification of the Fractional-Order Creep Model. Actuators. 2024; 13(12):534. https://doi.org/10.3390/act13120534
Chicago/Turabian StyleTashakori, Shabnam, Andres San-Millan, Vahid Vaziri, and Sumeet S. Aphale. 2024. "Fast Parameter Identification of the Fractional-Order Creep Model" Actuators 13, no. 12: 534. https://doi.org/10.3390/act13120534
APA StyleTashakori, S., San-Millan, A., Vaziri, V., & Aphale, S. S. (2024). Fast Parameter Identification of the Fractional-Order Creep Model. Actuators, 13(12), 534. https://doi.org/10.3390/act13120534