
Coordinated Control for the Trajectory Tracking of Four-Wheel Independent Drive–Four-Wheel Independent Steering Electric Vehicles Based on the Extension Dynamic Stability Domain


Abstract
:1. Introduction
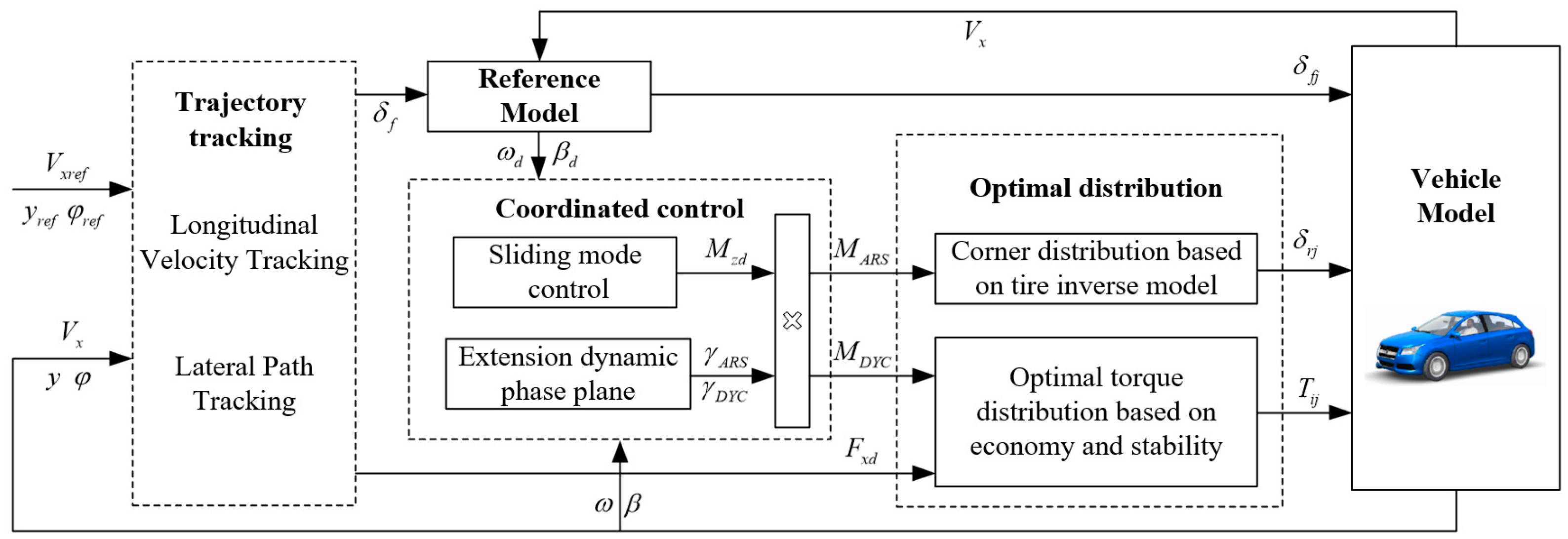
- A hierarchical chassis coordinated control architecture is proposed, consisting of a trajectory tracking layer, coordinated control layer, and optimal distribution layer, taking into account trajectory tracking performance, handling stability, and economy.
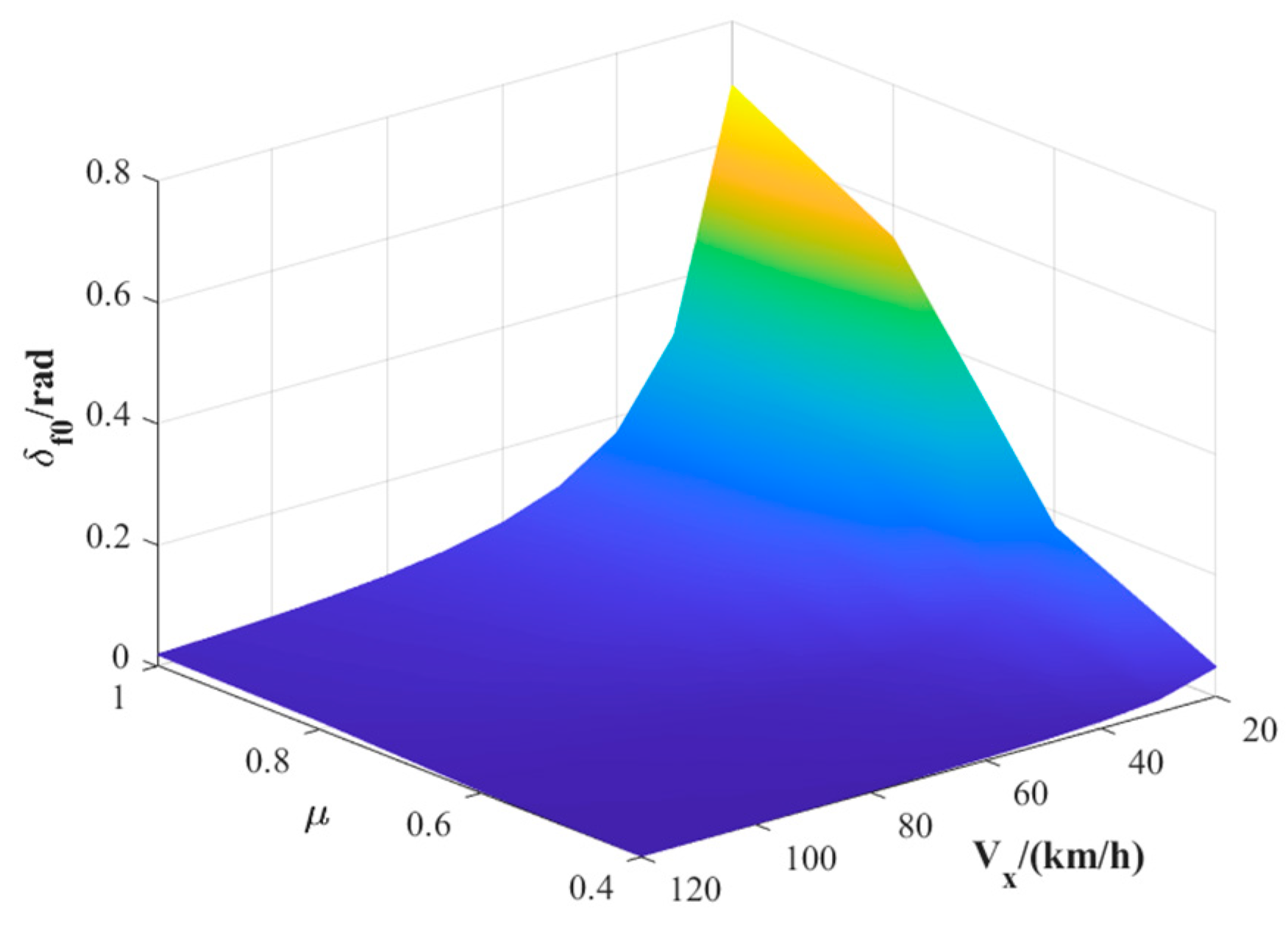
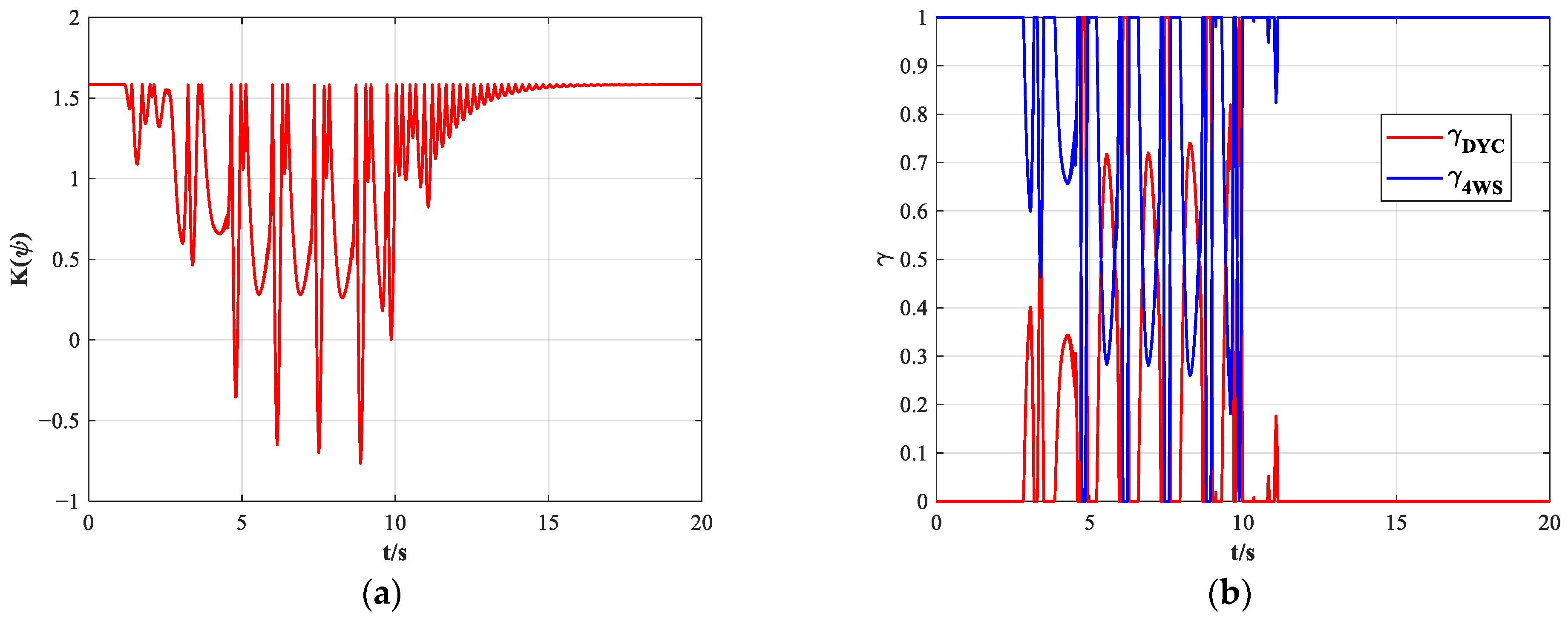
- The extension theory is employed to extend the traditional phase plane, constructing an extension dynamic stability domain based on the vehicle’s linear response characteristics. The boundary values of the extension domain are adaptively adjusted according to vehicle speed and road adhesion coefficient, determining the control weights for ARS and DYC. This method is simple and efficient, overcoming the limitations of traditional stability domain boundaries that cannot be adjusted and are difficult to accurately obtain.
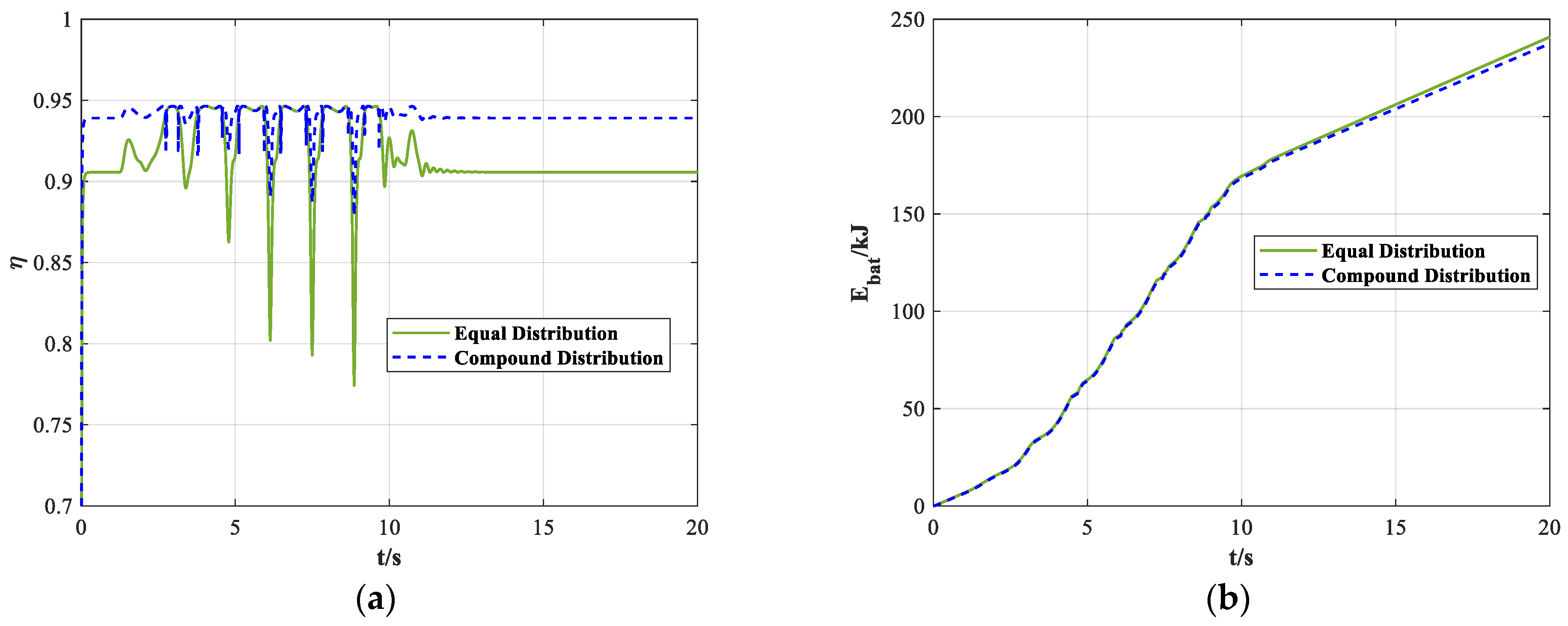
- A compound torque distribution strategy is developed that combines economic distribution with stability distribution, taking into account driving efficiency and tire adhesion rate as indicators. The real-time optimal distribution of wheel torque is achieved using the mutant particle swarm algorithm (MPSO) and the quadratic programming algorithm, respectively. It demonstrates good real-time performance and enables multi-objective optimization of stability and economy.
2. Chassis Coordinated Control
2.1. Vehicle Model
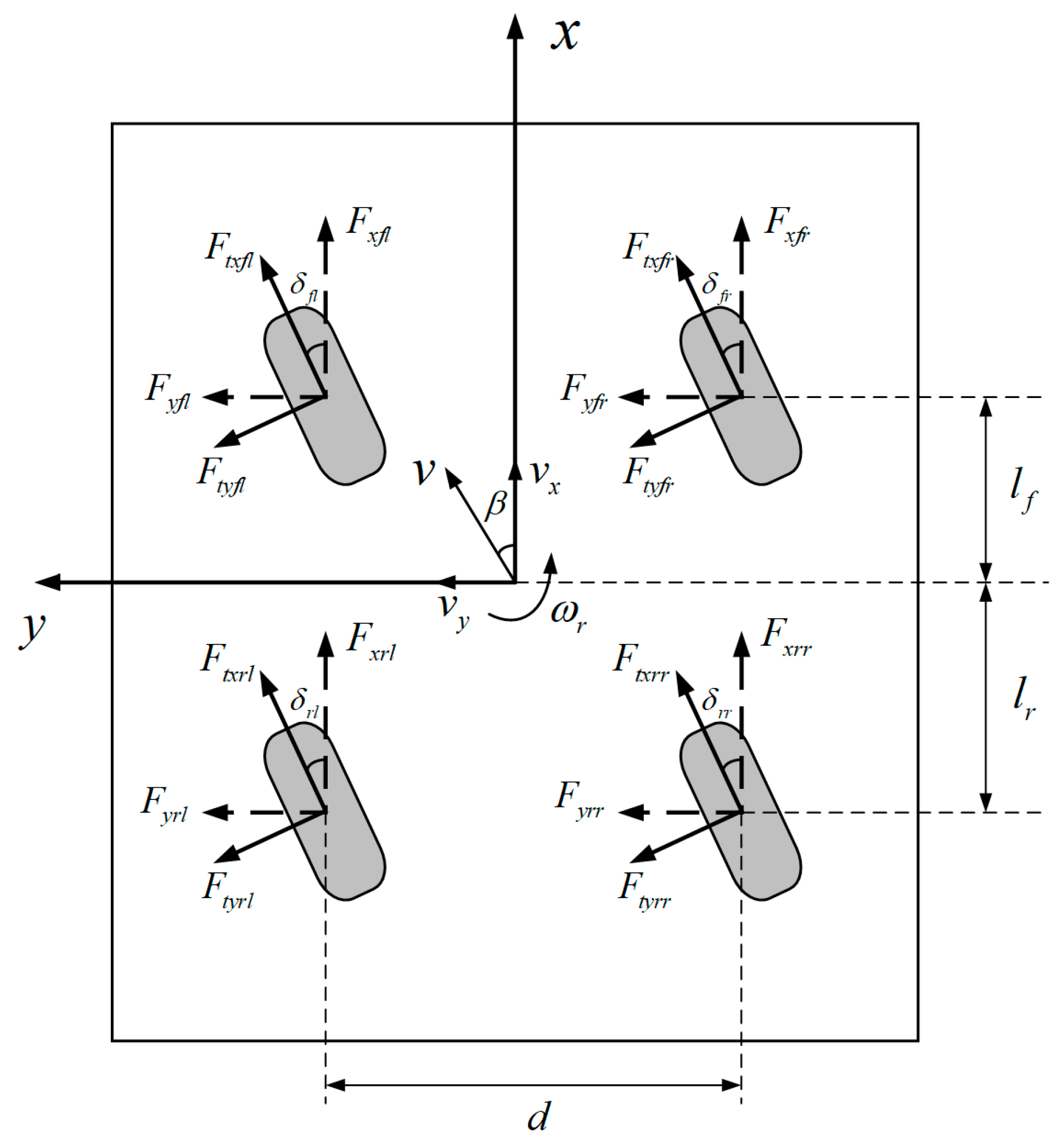
2.1.1. Vehicle Dynamic Model
2.1.2. Tire Model
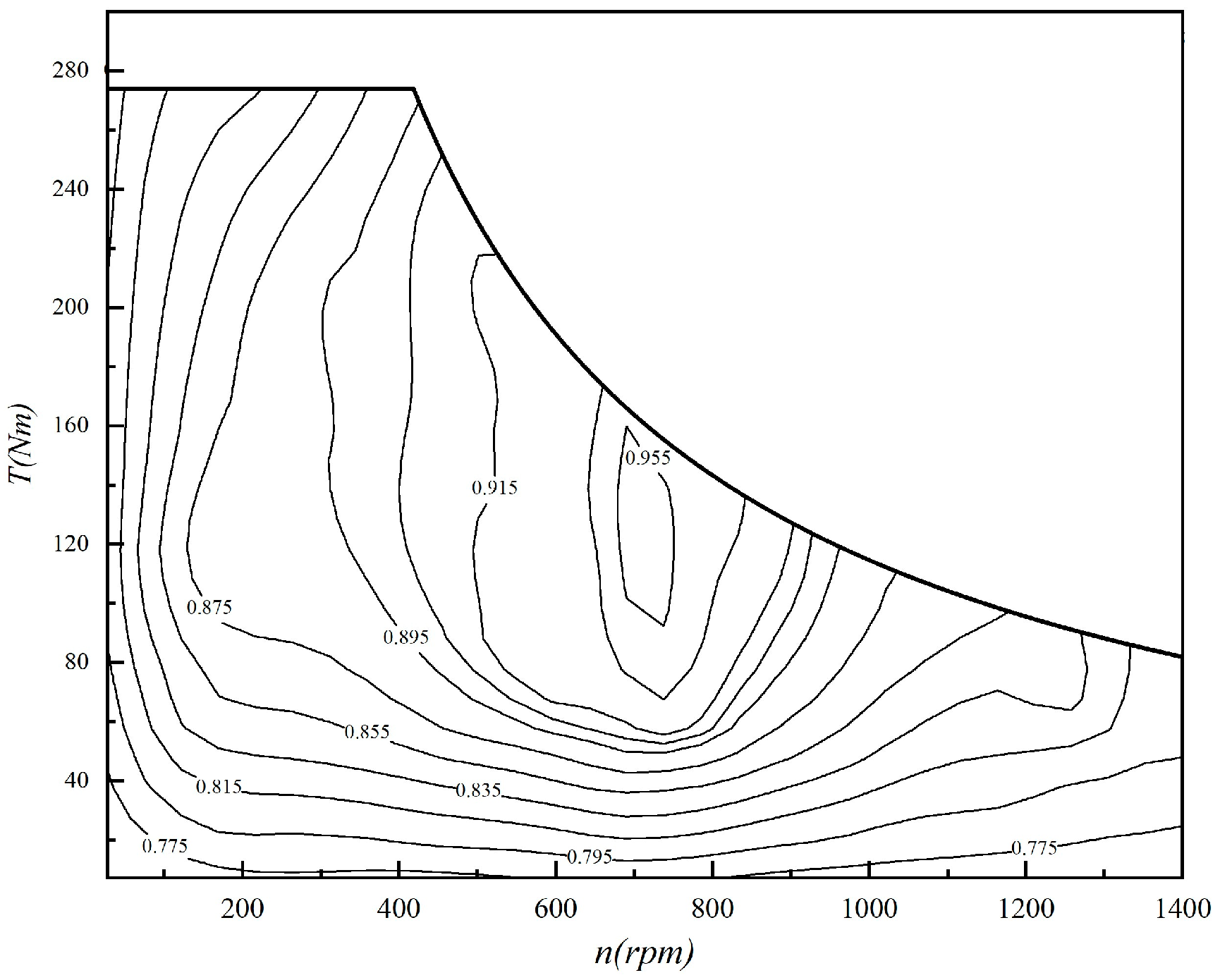
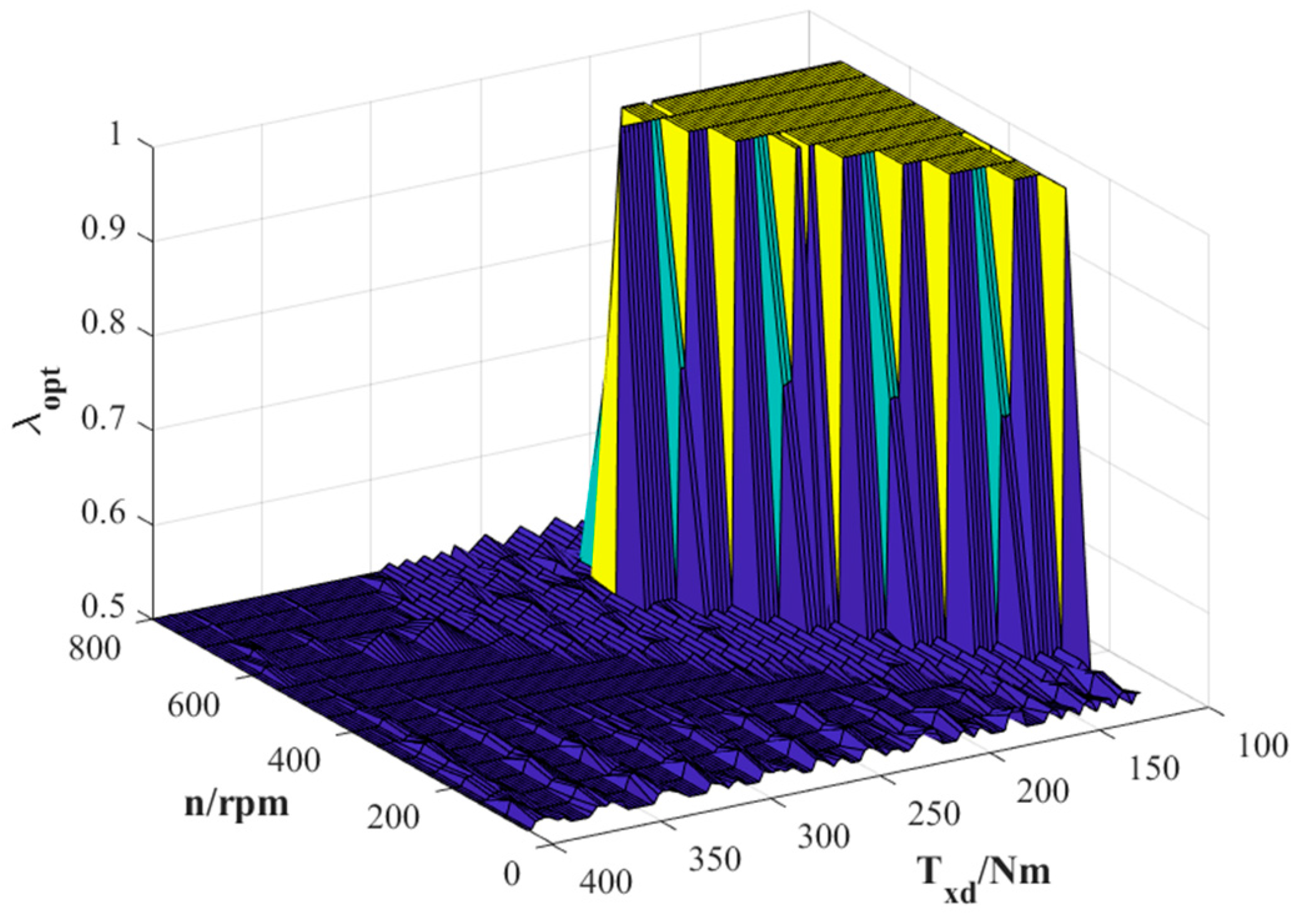
2.1.3. Motor Model
- In-wheel motor model:
- 2.
- Steering motor model
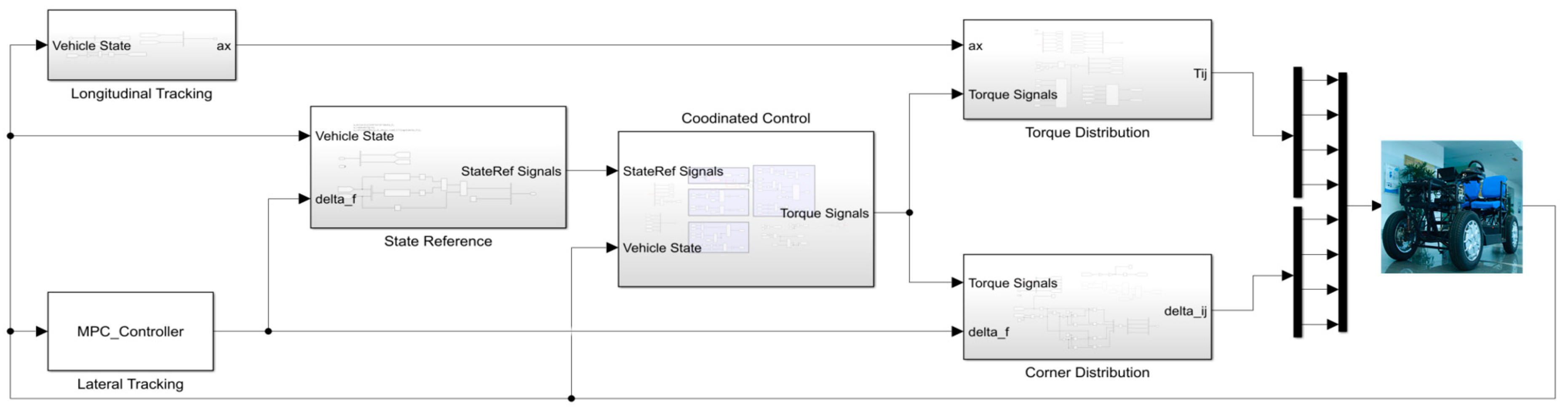
2.2. Chassis Control Architecture
2.3. Trajectory Tracking Layer
2.3.1. Longitudinal Velocity Tracking
2.3.2. Lateral Path Tracking
2.4. Coordinated Control Layer
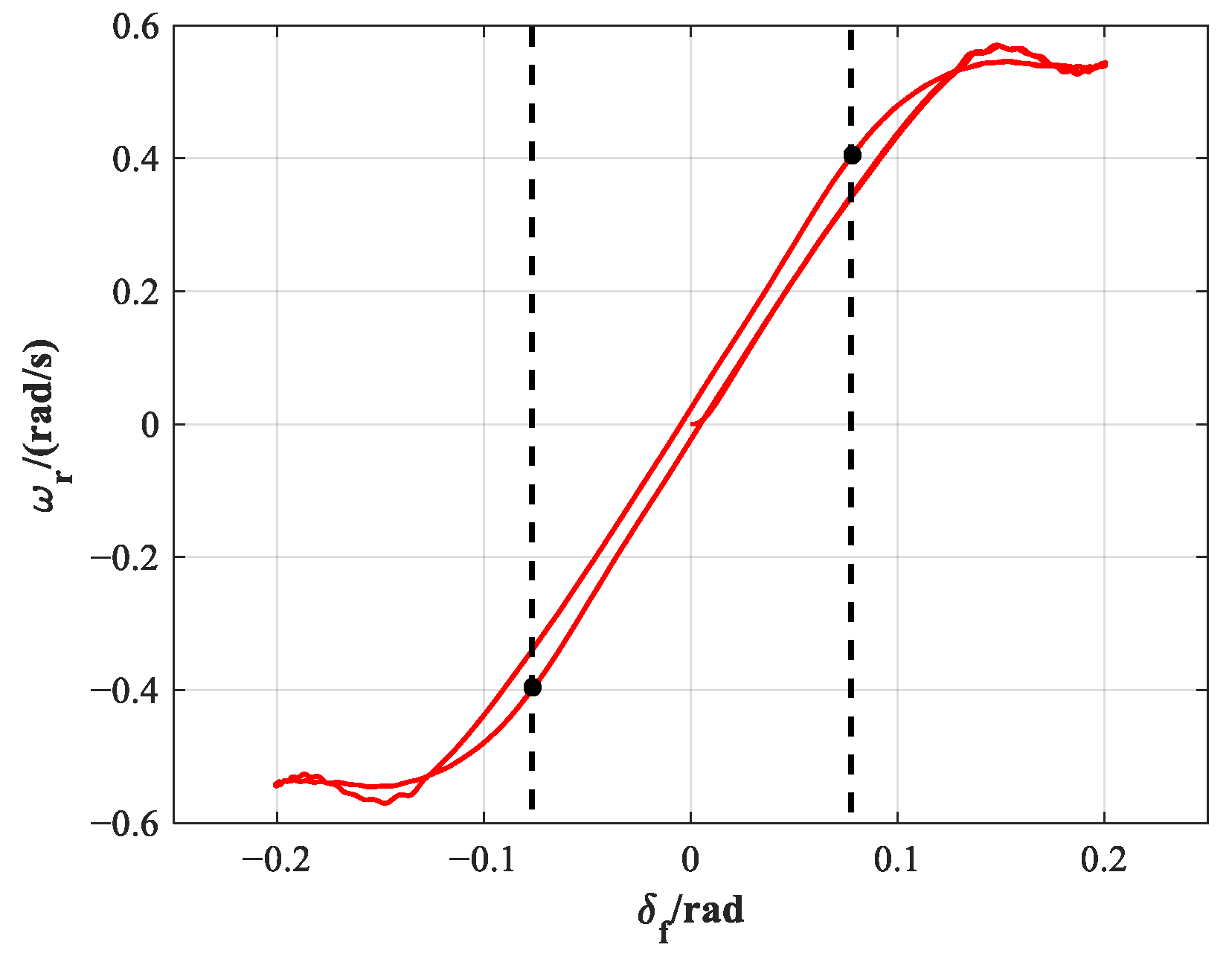
2.4.1. Reference States
2.4.2. Additional Yaw Moment
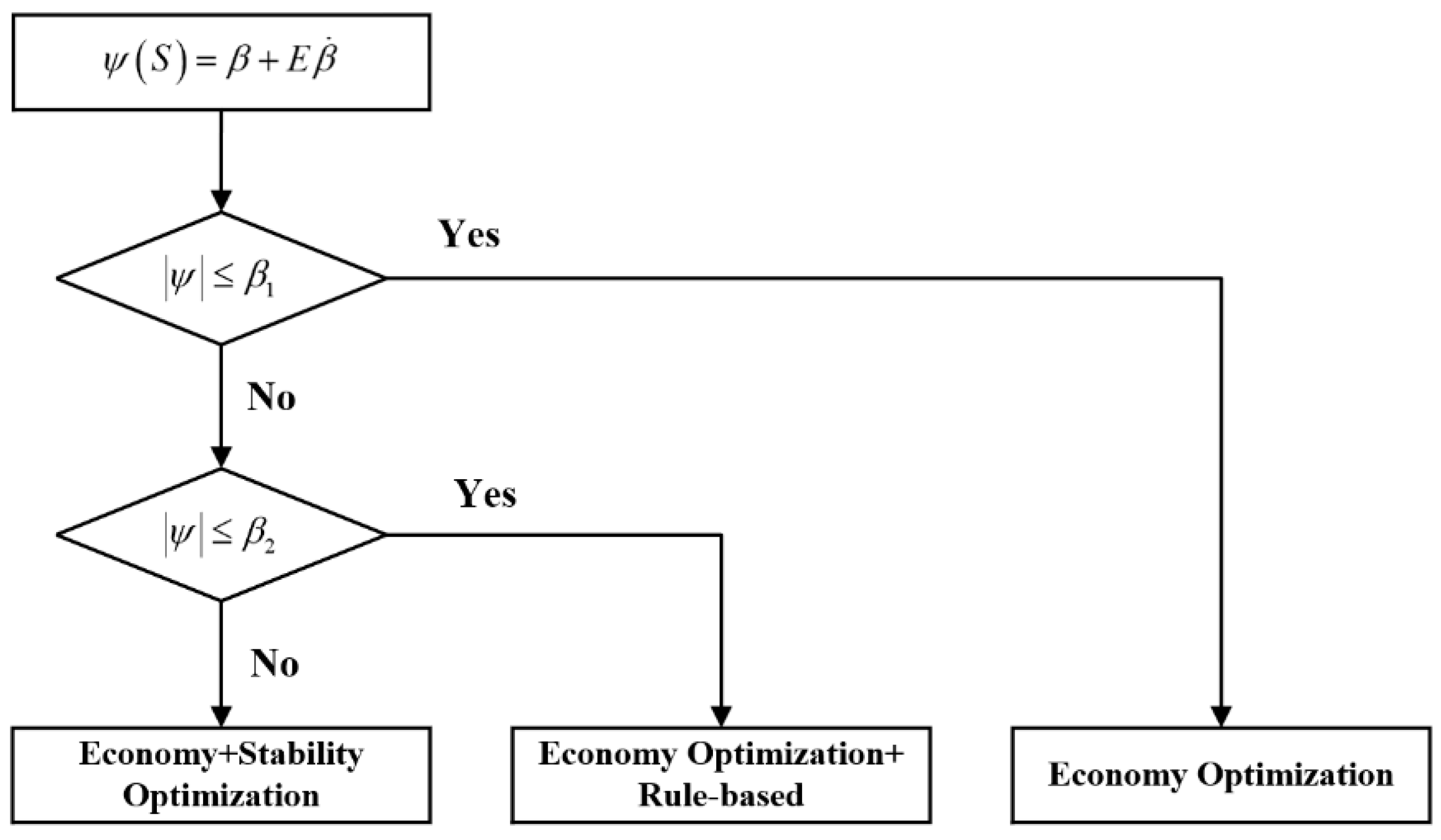
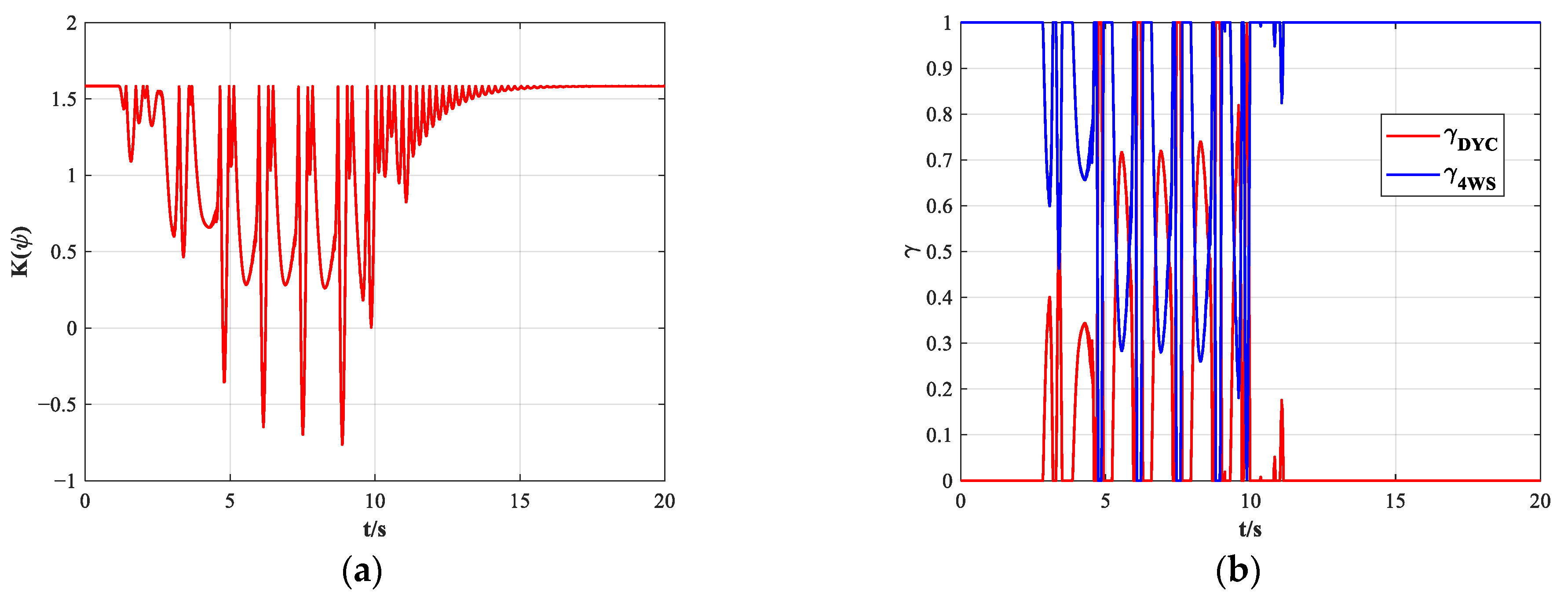
2.4.3. Coordinated Strategy
- Characteristic State Extraction:
- 2.
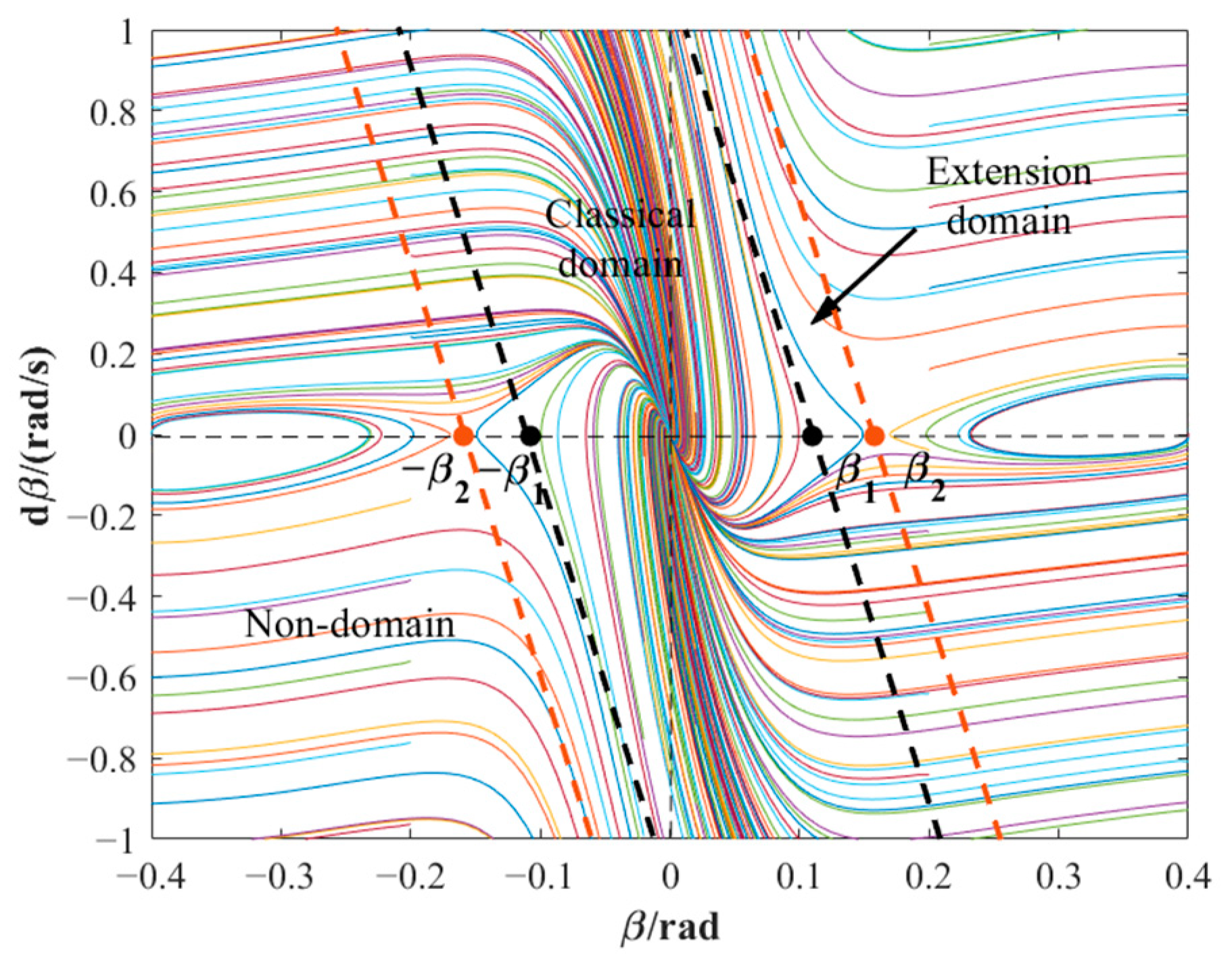
- Domain Division
- Non-domain Boundary
- 2.
- Extension Domain Boundary
- 3.
- Correction Calculation
- 4.
- Measurement Pattern Recognition
2.5. Optimal Distribution Layer
2.5.1. Torque Distribution
- Classical Domain
- 2.
- Extension Domain
- 3.
- Non-domain
2.5.2. Corner Distribution
3. Simulation and Results
3.1. Environment and Configuration
3.2. Results and Analysis
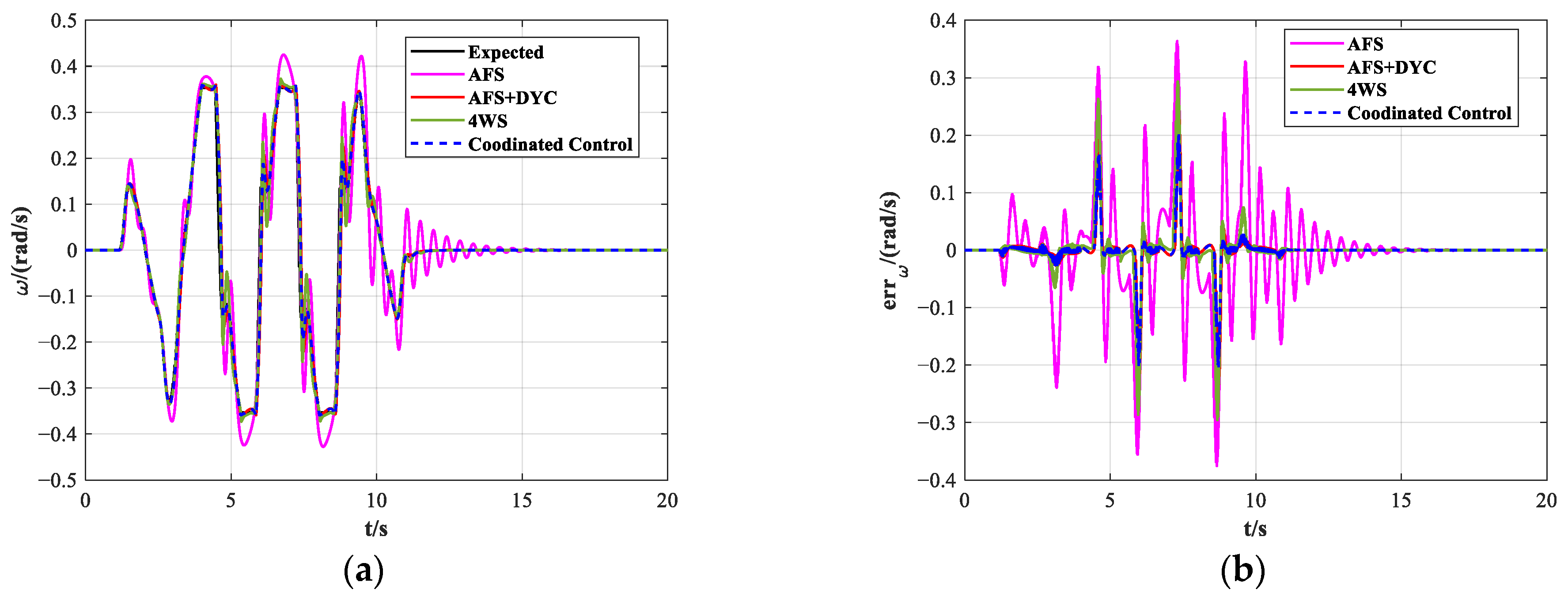
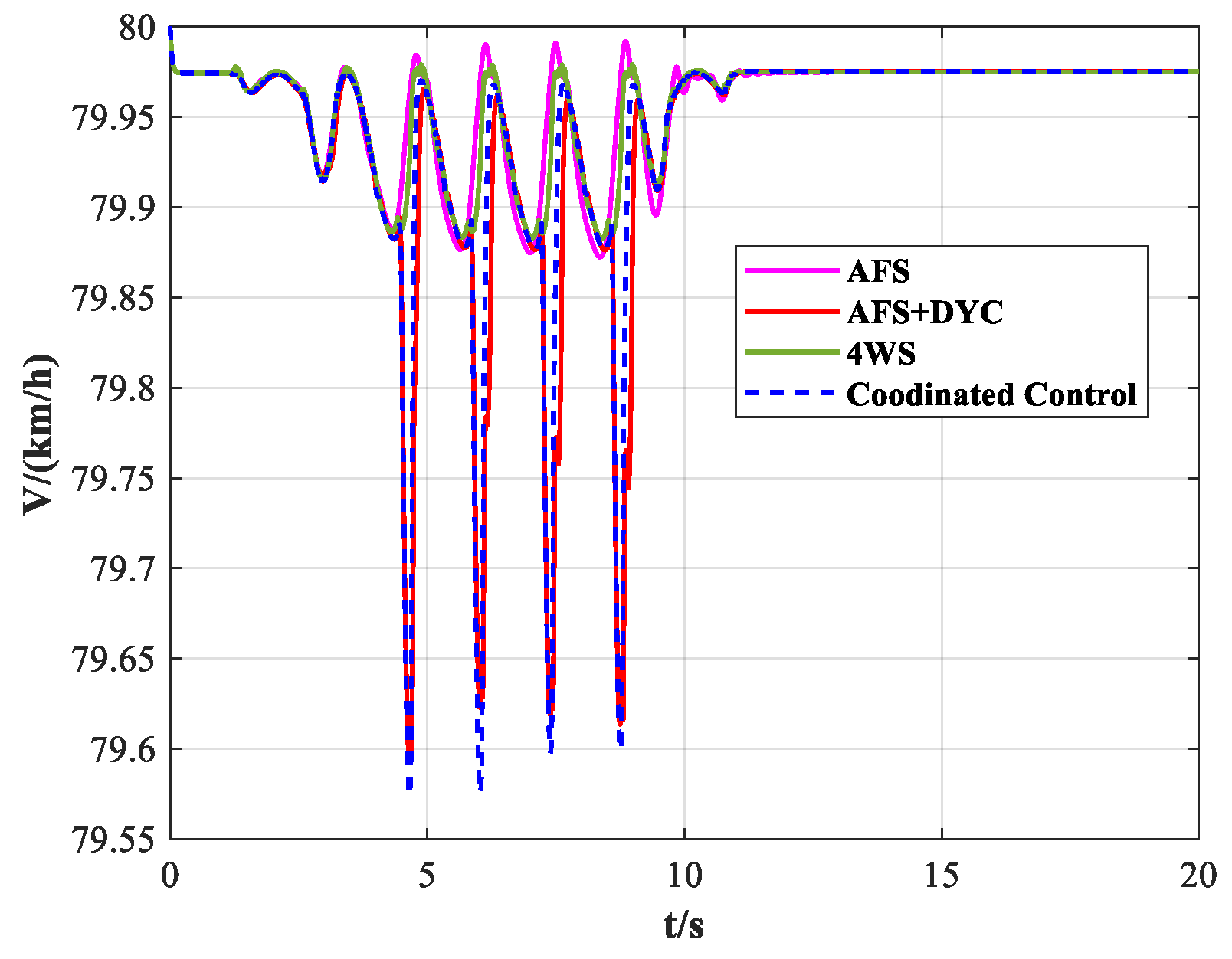
3.2.1. Slalom Test
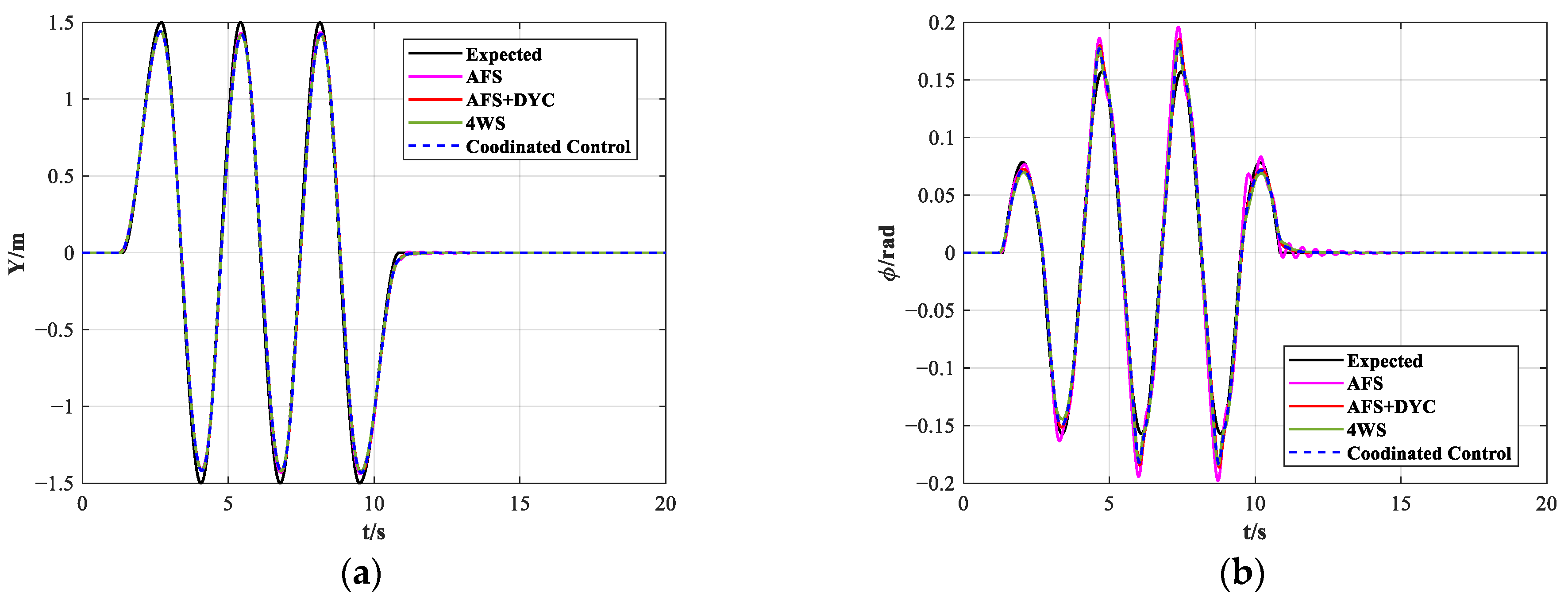
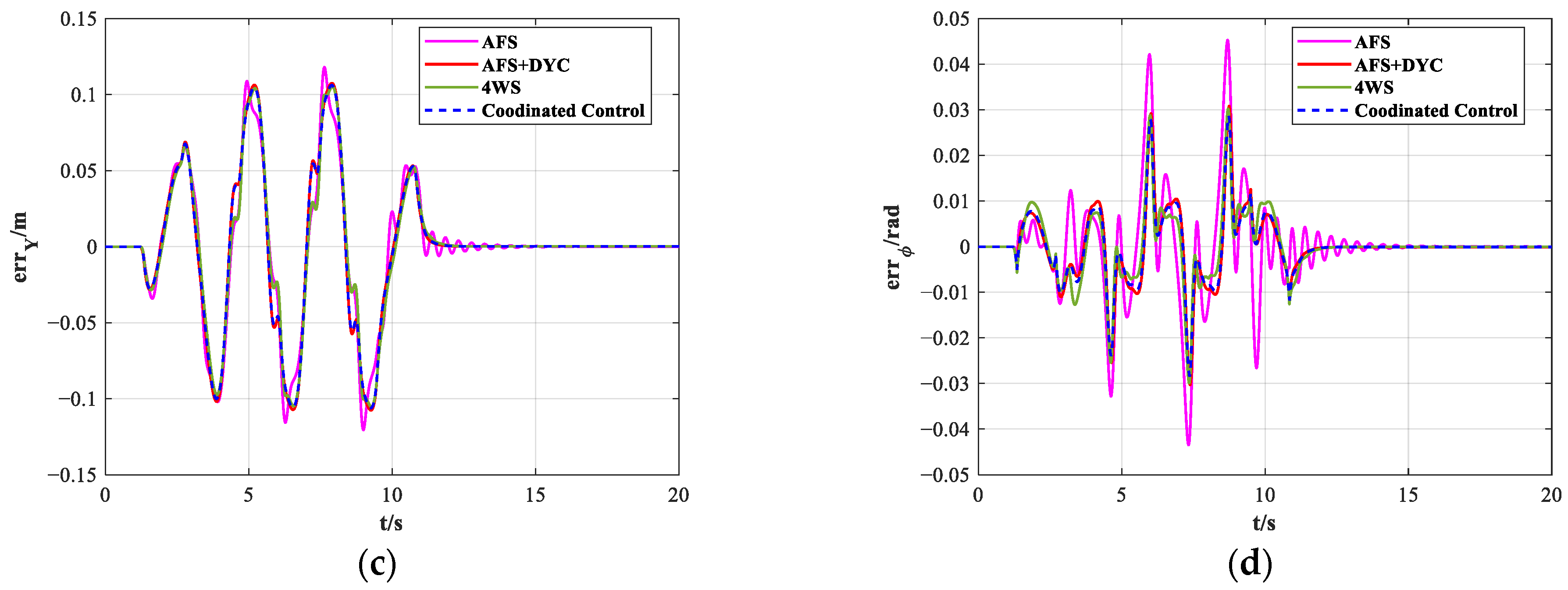
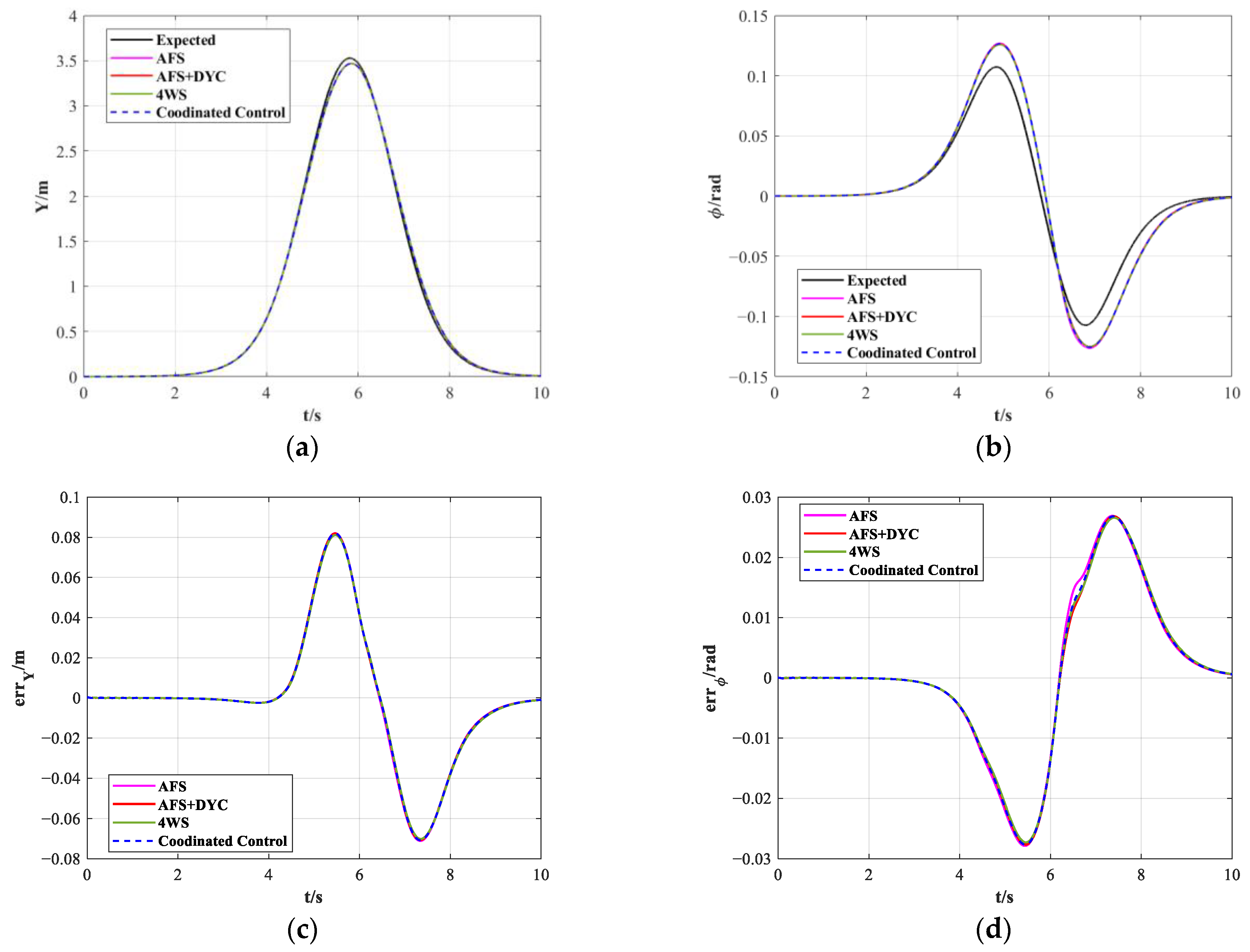
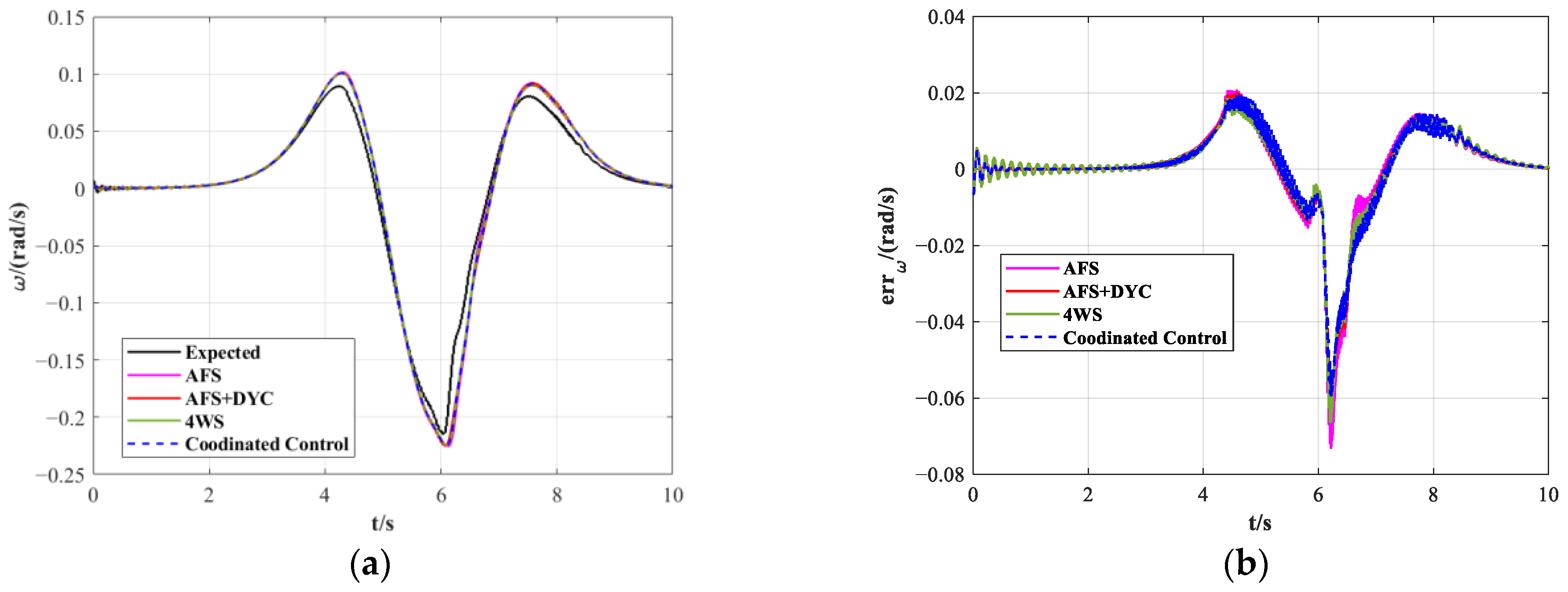
3.2.2. Double-Lane Change
4. Discussion
- The designed PID-based longitudinal velocity tracking controller and MPC-based lateral path tracking controller in this study both achieve good tracking performance, meeting the accuracy requirements of trajectory tracking control.
- When comparing the 4WS and AFS + DYC strategies, the 4WS strategy provides better path tracking performance, while the AFS + DYC strategy offers better handling stability.
- Stability and path tracking accuracy interact with each other. Improved stability leads to a decrease in path tracking accuracy, and the increase in path tracking accuracy reduces vehicle stability. The proposed coordinated control strategy maximizes the advantages of the steering and drive subsystems. By combining 4WS with DYC, it comprehensively controls stability and path tracking accuracy. This strategy can achieve better trajectory tracking control while improving the vehicle’s handling stability, realizing coordinated control with dual objectives.
- The proposed compound torque distribution strategy can enhance the vehicle’s economy while maintaining trajectory tracking performance and stability.
- Division of Stability Domain:
- Adaptive Adjustment of Control Weights:
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- He, S.W.; Fan, X.B.; Wang, Q.W.; Chen, X.B.; Zhu, S.W. Review on Torque Distribution Scheme of Four-Wheel In-Wheel Motor Electric Vehicle. Machines 2022, 10, 619. [Google Scholar] [CrossRef]
- Peng, H.; Chen, X.B. Active Safety Control of X-by-Wire Electric Vehicles: A Survey. SAE Int. J. Veh. Dyn. Stab. NVH 2022, 6, 115–133. [Google Scholar] [CrossRef]
- Zhang, L.; Zhang, Z.Q.; Wang, Z.P.; Deng, J.J.; Dorrell, D.G. Chassis Coordinated Control for Full X-by-Wire Vehicles—A Review. Chin. J. Mech. Eng. 2021, 34, 42. [Google Scholar] [CrossRef]
- Hang, P.; Chen, X.B. Towards Autonomous Driving: Review and Perspectives on Configuration and Control of Four-Wheel Independent Drive/Steering Electric Vehicles. Actuators 2021, 10, 184. [Google Scholar] [CrossRef]
- Song, P.; Tomizuka, M.; Zong, C.F. A novel integrated chassis controller for full drive-by-wire vehicles. Veh. Syst. Dyn. 2015, 53, 215–236. [Google Scholar] [CrossRef]
- Lai, F.; Huang, C.Q.; Jiang, C.Y. Comparative Study on Bifurcation and Stability Control of Vehicle Lateral Dynamics. SAE Int. J. Veh. Dyn. Stab. NVH 2022, 6, 35–52. [Google Scholar] [CrossRef]
- Peng, H.N.; Wang, W.D.; Xiang, C.L.; Li, L.; Wang, X.Y. Torque Coordinated Control of Four In-Wheel Motor Independent-Drive Vehicles With Consideration of the Safety and Economy. IEEE Trans. Veh. Technol. 2019, 68, 9604–9618. [Google Scholar] [CrossRef]
- Xu, F.X.; Liu, X.H.; Chen, W.; Zhou, C. Dynamic Switch Control of Steering Modes for Four Wheel Independent Steering Rescue Vehicle. IEEE Access 2019, 7, 135595–135605. [Google Scholar] [CrossRef]
- Zhang, B.H.; Lu, S.B.; Zhao, L.; Xiao, K.X. Fault-tolerant control based on 2D game for independent driving electric vehicle suffering actuator failures. Proc. Inst. Mech. Eng. Part D J. Automob. Eng. 2020, 234, 3011–3025. [Google Scholar] [CrossRef]
- Wang, J.N.; Gao, S.L.; Wang, K.; Wang, Y.; Wang, Q.S. Wheel torque distribution optimization of four-wheel independent-drive electric vehicle for energy efficient driving. Control Eng. Pract. 2021, 110, 104779. [Google Scholar] [CrossRef]
- Li, D.F.; Liu, A.; Pan, H.; Chen, W.T. Safe, Efficient and Socially-Compatible Decision of Automated Vehicles: A Case Study of Unsignalized Intersection Driving. Automot. Innov. 2023, 6, 281–296. [Google Scholar] [CrossRef]
- Zhang, X.; Li, J.; Ma, Z.; Chen, D.; Zhou, X. Lateral Trajectory Tracking of Self-Driving Vehicles Based on Sliding Mode and Fractional-Order Proportional-Integral-Derivative Control. Actuators 2023, 13, 7. [Google Scholar] [CrossRef]
- Liu, K.; Wen, G.; Fu, Y.; Wang, H. A Hierarchical Lane-Changing Trajectory Planning Method Based on the Least Action Principle. Actuators 2023, 13, 10. [Google Scholar] [CrossRef]
- Tong, Y.W.; Li, C.; Wang, G.; Jing, H. Integrated Path-Following and Fault-Tolerant Control for Four-Wheel Independent-Driving Electric Vehicles. Automot. Innov. 2022, 5, 311–323. [Google Scholar] [CrossRef]
- Hang, P.; Xia, X.; Chen, G.; Chen, X. Active Safety Control of Automated Electric Vehicles at Driving Limits: A Tube-Based MPC Approach. IEEE Trans. Transp. Electrif. 2022, 8, 1338–1349. [Google Scholar] [CrossRef]
- Guo, N.; Zhang, X.; Zou, Y. Real-Time Predictive Control of Path Following to Stabilize Autonomous Electric Vehicles Under Extreme Drive Conditions. Automot. Innov. 2022, 5, 453–470. [Google Scholar] [CrossRef]
- Ren, Y.; Zheng, L.; Khajepour, A. Integrated model predictive and torque vectoring control for path tracking of 4-wheel-driven autonomous vehicles. IET Intell. Transp. Syst. 2019, 13, 98–107. [Google Scholar] [CrossRef]
- Hu, C.; Wang, R.; Yan, F.; Chen, N. Output Constraint Control on Path Following of Four-Wheel Independently Actuated Autonomous Ground Vehicles. IEEE Trans. Veh. Technol. 2016, 65, 4033–4043. [Google Scholar] [CrossRef]
- Mousavinejad, E.; Han, Q.L.; Yang, F.W.; Zhu, Y.; Vlacic, L. Integrated control of ground vehicles dynamics via advanced terminal sliding mode control. Veh. Syst. Dyn. 2017, 55, 268–294. [Google Scholar] [CrossRef]
- Mirzaeinejad, H.; Mirzaei, M.; Rafatnia, S. A novel technique for optimal integration of active steering and differential braking with estimation to improve vehicle directional stability. ISA Trans. 2018, 80, 513–527. [Google Scholar] [CrossRef]
- Zhang, H.; Li, X.S.; Shi, S.M.; Liu, H.F.; Guan, R.; Liu, L. Phase Plane Analysis for Vehicle Handling and Stability. Int. J. Comput. Intell. Syst. 2011, 4, 1179–1186. [Google Scholar] [CrossRef]
- Liang, Y.; Li, Y.; Yu, Y.; Zheng, L. Integrated lateral control for 4WID/4WIS vehicle in high-speed condition considering the magnitude of steering. Veh. Syst. Dyn. 2019, 58, 1711–1735. [Google Scholar] [CrossRef]
- Tian, J.; Wang, Q.; Ding, J.; Wang, Y.Q.; Ma, Z.S. Integrated Control With DYC and DSS for 4WID Electric Vehicles. IEEE Access 2019, 7, 124077–124086. [Google Scholar] [CrossRef]
- Chen, W.W.; Liang, X.T.; Wang, Q.D.; Zhao, L.F.; Wang, X. Extension coordinated control of four wheel independent drive electric vehicles by AFS and DYC. Control Eng. Pract. 2020, 101, 104504. [Google Scholar] [CrossRef]
- Zheng, Z.C.; Zhao, X.; Wang, S.; Yu, Q.; Zhang, H.C.; Li, Z.K.; Chai, H.; Han, Q. Extension coordinated control of distributed-driven electric vehicles based on evolutionary game theory. Control Eng. Pract. 2023, 137, 105583. [Google Scholar] [CrossRef]
- Liu, R.Q.; Wei, M.X.; Zhao, W.Z. Trajectory tracking control of four wheel steering under high speed emergency obstacle avoidance. Int. J. Veh. Des. 2018, 77, 1–21. [Google Scholar] [CrossRef]
- Xu, N.; Zhou, J.F.; Li, X.Y.; Li, F. Analysis of the Effect of Inflation Pressure on Vehicle Handling and Stability under Combined Slip Conditions Based on the UniTire Model. SAE Int. J. Veh. Dyn. Stab. NVH 2021, 5, 259–277. [Google Scholar] [CrossRef]
- Yu, Z.; Wang, J. Automatic Vehicle Trajectory Tracking Control with Self-calibration of Nonlinear Tire Force Function. In Proceedings of the 2017 American Control Conference (ACC), Seattle, WA, USA, 24–26 May 2017; pp. 985–990. [Google Scholar]
- Attia, R.; Orjuela, R.; Basset, M. Combined longitudinal and lateral control for automated vehicle guidance. Veh. Syst. Dyn. 2014, 52, 261–279. [Google Scholar] [CrossRef]
- Qiao, Y.R.; Chen, X.B.; Liu, Z. Trajectory Tracking Coordinated Control of 4WID-4WIS Electric Vehicle Considering Energy Consumption Economy Based on Pose Sensors. Sensors 2023, 23, 5496. [Google Scholar] [CrossRef] [PubMed]
- Wu, X.J.; Zhou, B.; Wen, G.L.; Long, L.F.; Cui, Q.J. Intervention criterion and control research for active front steering with consideration of road adhesion. Veh. Syst. Dyn. 2018, 56, 553–578. [Google Scholar] [CrossRef]
- Wong, A.; Kasinathan, D.; Khajepour, A.; Chen, S.K.; Litkouhi, B. Integrated torque vectoring and power management framework for electric vehicles. Control Eng. Pract. 2016, 48, 22–36. [Google Scholar] [CrossRef]
- Marini, F.; Walczak, B. Particle swarm optimization (PSO). A tutorial. Chemom. Intell. Lab. Syst. 2015, 149, 153–165. [Google Scholar] [CrossRef]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Control Strategy | Lateral Offset (m) | Heading Angle Error (Rad) | ||
|---|---|---|---|---|
| Max | RMS | Max | RMS | |
| AFS | 0.1206 | 0.0439 | 0.0453 | 0.0107 |
| AFS + DYC | 0.1076 | 0.0453 | 0.0308 | 0.0071 |
| 4WS | 0.1053 | 0.0435 | 0.0302 | 0.0070 |
| Coordinated Control | 0.1062 | 0.0445 | 0.0286 | 0.0067 |
| Control Strategy | Yaw Rate Error (Rad/s) | Sideslip Angle Error (Rad) | ||
|---|---|---|---|---|
| Max | RMS | Max | RMS | |
| AFS | 0.3752 | 0.0878 | 0.0536 | 0.0171 |
| AFS + DYC | 0.2393 | 0.0306 | 0.0328 | 0.0112 |
| 4WS | 0.2957 | 0.0433 | 0.0347 | 0.0118 |
| Coordinated Control | 0.2037 | 0.0258 | 0.0326 | 0.0108 |
| Control Strategy | Lateral Offset (m) | Heading Angle Error (Rad) | ||
|---|---|---|---|---|
| Max | RMS | Max | RMS | |
| AFS | 0.0821 | 0.0324 | 0.0278 | 0.0130 |
| AFS + DYC | 0.0819 | 0.0322 | 0.0276 | 0.0128 |
| 4WS | 0.0811 | 0.0320 | 0.0273 | 0.0127 |
| Coordinated Control | 0.0814 | 0.0321 | 0.0276 | 0.0127 |
| Control Strategy | Yaw Rate Error (Rad/s) | Sideslip Angle Error (Rad) | ||
|---|---|---|---|---|
| Max | RMS | Max | RMS | |
| AFS | 0.3752 | 0.0878 | 0.0536 | 0.0171 |
| AFS + DYC | 0.2393 | 0.0306 | 0.0328 | 0.0112 |
| 4WS | 0.2957 | 0.0433 | 0.0347 | 0.0118 |
| Coordinated Control | 0.2037 | 0.0258 | 0.0326 | 0.0108 |
| Control Strategy | Stability Domain Division | Control Weights | ||
|---|---|---|---|---|
| Extension Domain | Non-Domain | System | Strategy | |
| Ref [24] | Phase diagram boundaries | Scaling factor | AFS + DYC | Correlation function |
| Ref [25] | Tire’s linear zone | Phase diagram boundaries | AFS + DYC | Game theory |
| Proposed strategy | Vehicle’s linear zone | Phase diagram boundaries | 4WS + DYC | Correlation function |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Qiao, Y.; Chen, X.; Yin, D. Coordinated Control for the Trajectory Tracking of Four-Wheel Independent Drive–Four-Wheel Independent Steering Electric Vehicles Based on the Extension Dynamic Stability Domain. Actuators 2024, 13, 77. https://doi.org/10.3390/act13020077
Qiao Y, Chen X, Yin D. Coordinated Control for the Trajectory Tracking of Four-Wheel Independent Drive–Four-Wheel Independent Steering Electric Vehicles Based on the Extension Dynamic Stability Domain. Actuators. 2024; 13(2):77. https://doi.org/10.3390/act13020077
Chicago/Turabian StyleQiao, Yiran, Xinbo Chen, and Dongxiao Yin. 2024. "Coordinated Control for the Trajectory Tracking of Four-Wheel Independent Drive–Four-Wheel Independent Steering Electric Vehicles Based on the Extension Dynamic Stability Domain" Actuators 13, no. 2: 77. https://doi.org/10.3390/act13020077