
Double Air Chambers Pneumatic Artificial Muscle and Non-Hysteresis Position Control


Abstract
1. Introduction
2. Double Air Chambers Pneumatic Artificial Muscle
2.1. Rubber-Less Artificial Muscle
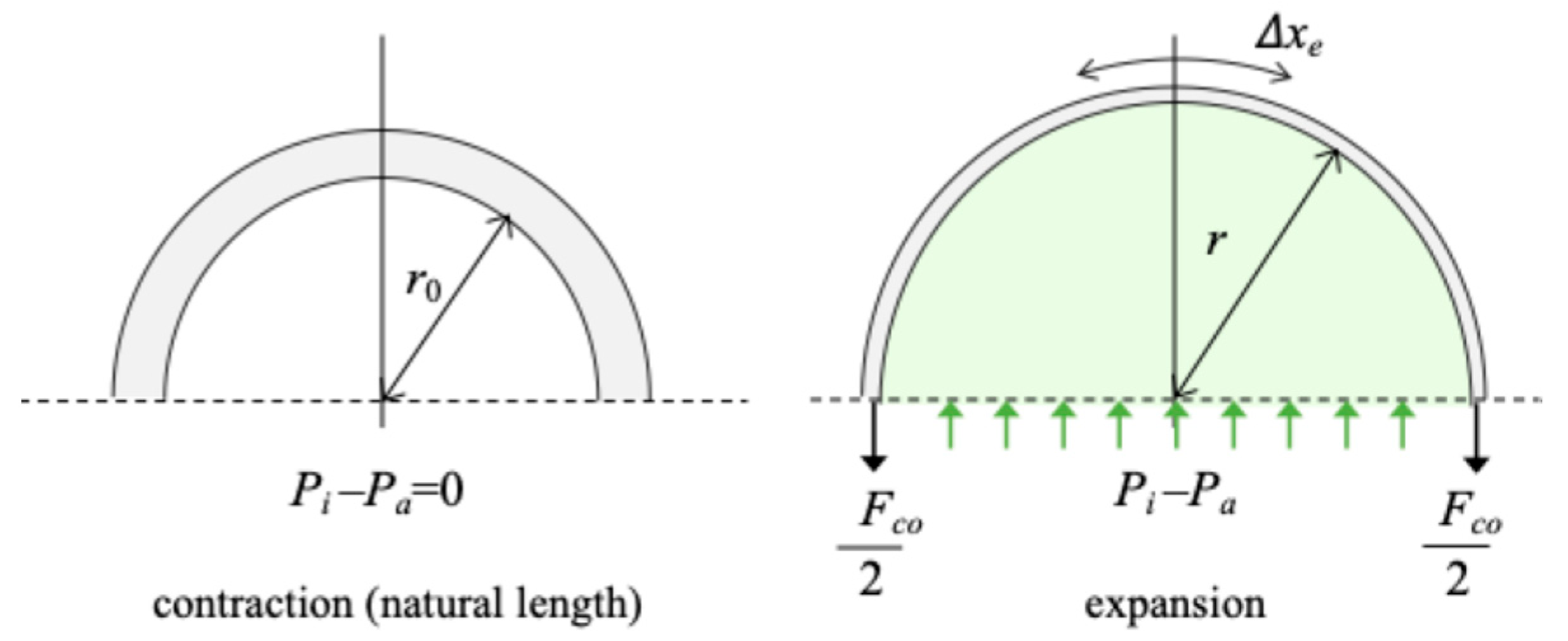
2.2. Hysteresis Occurring Mechanism of RLAM
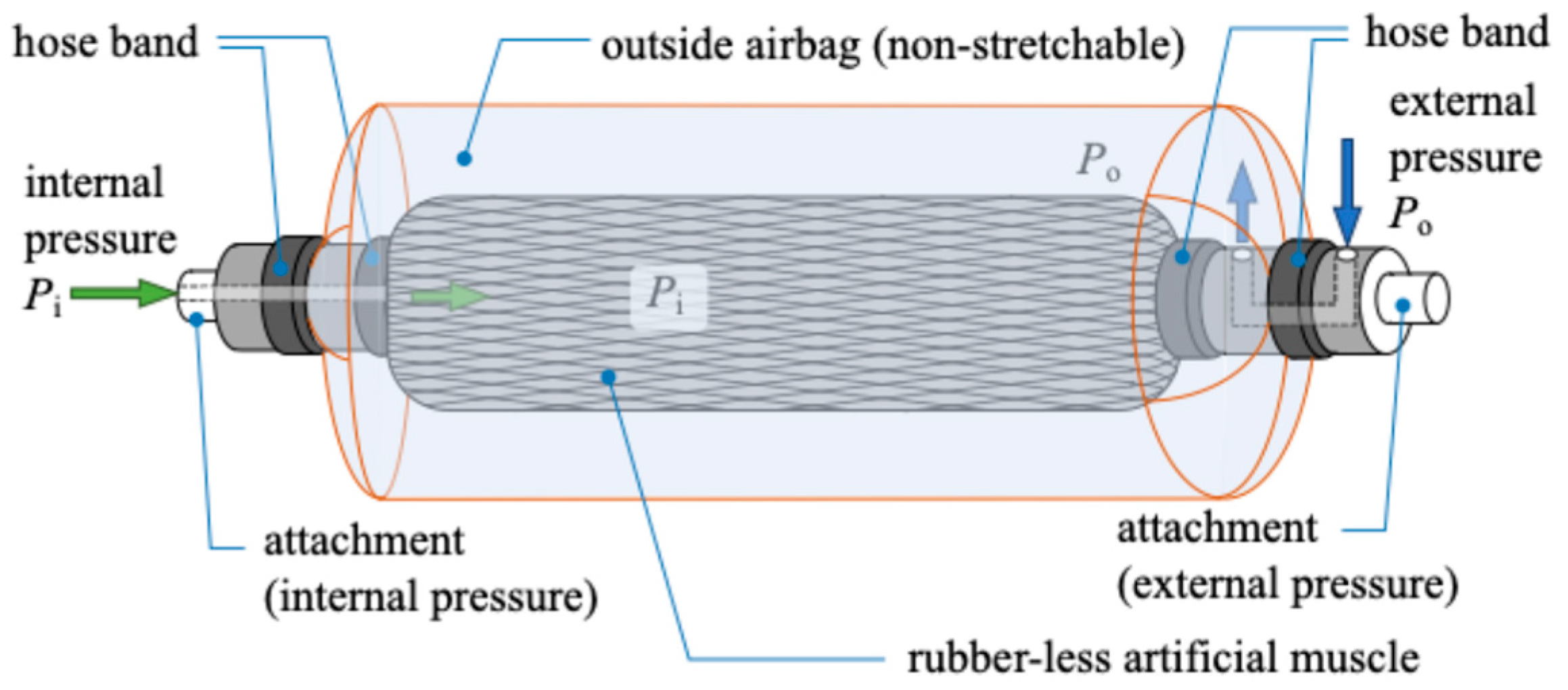
2.3. Double Air Chambers Pneumatic Artificial Muscle (W-PAM)
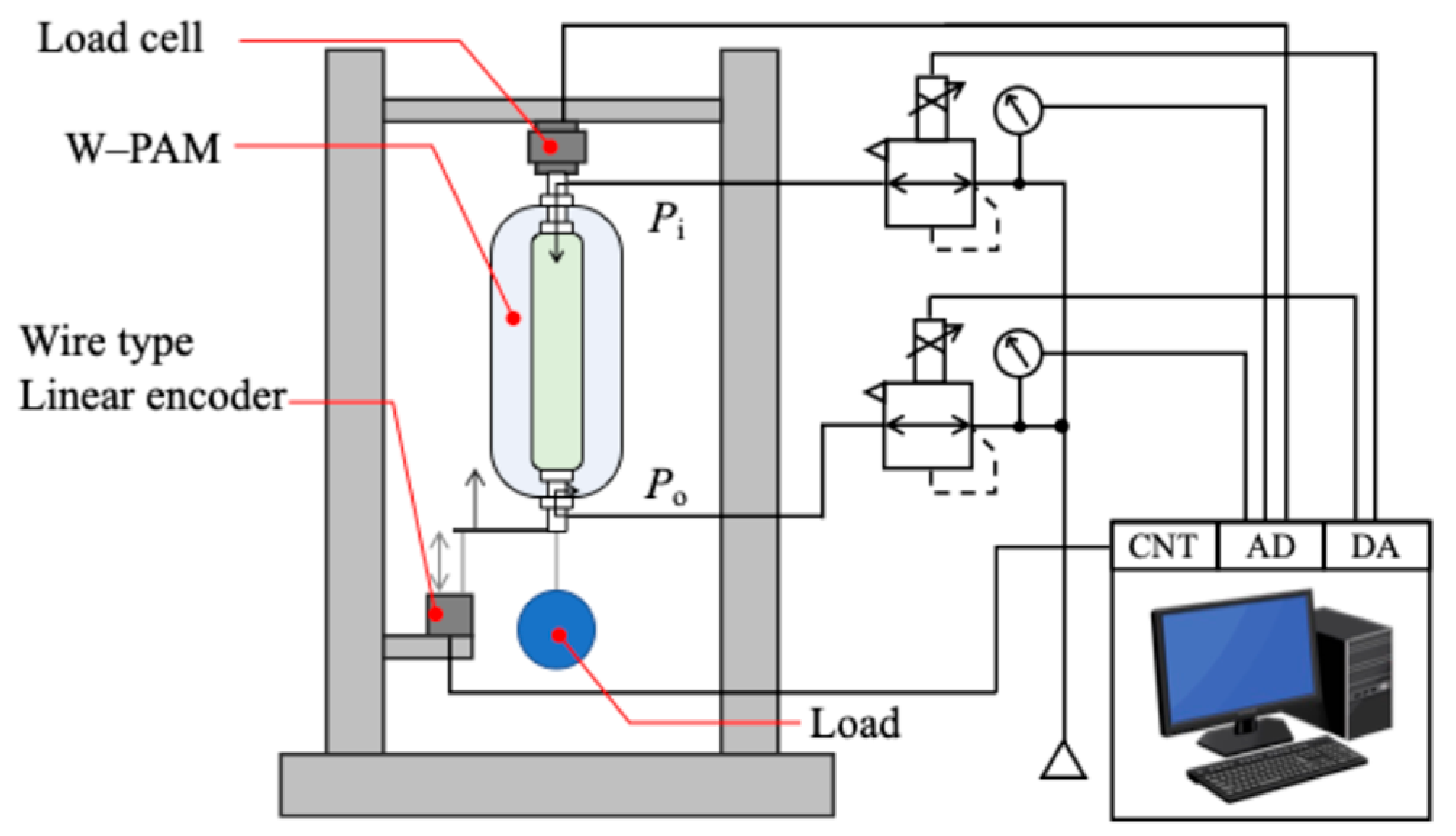
3. Operation of External Pressure Based on the Feedback Control
4. Experimental Results
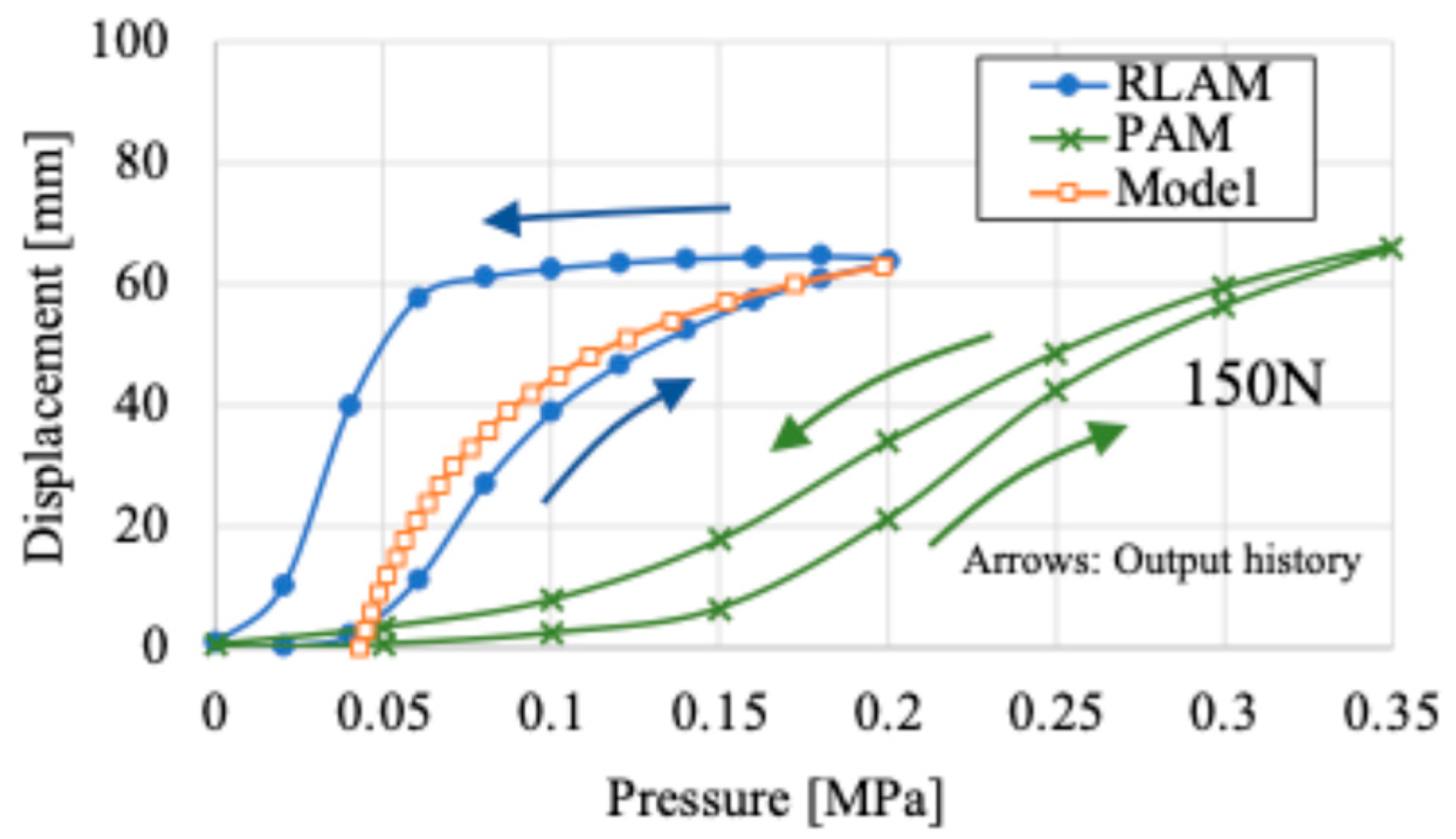
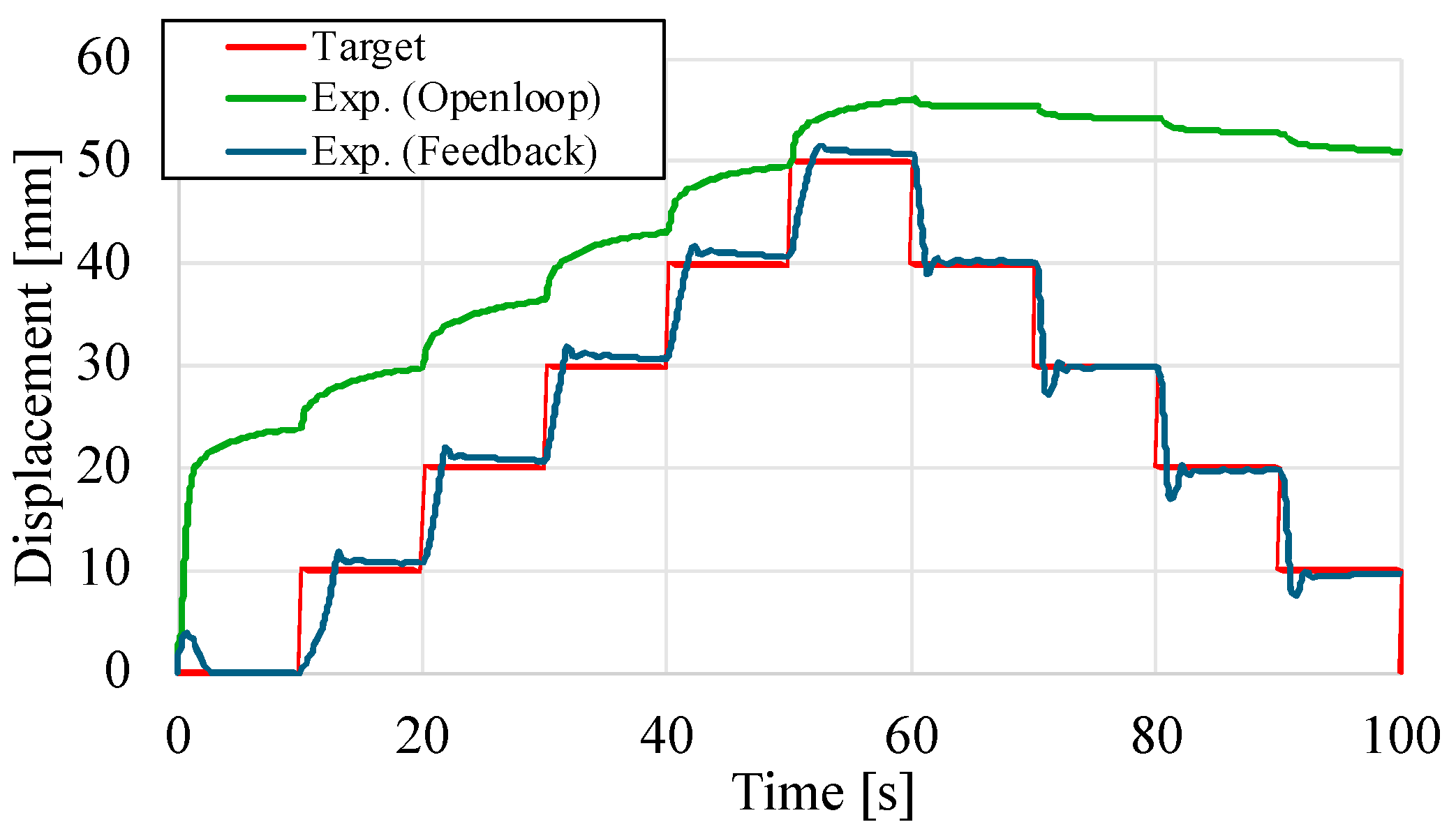
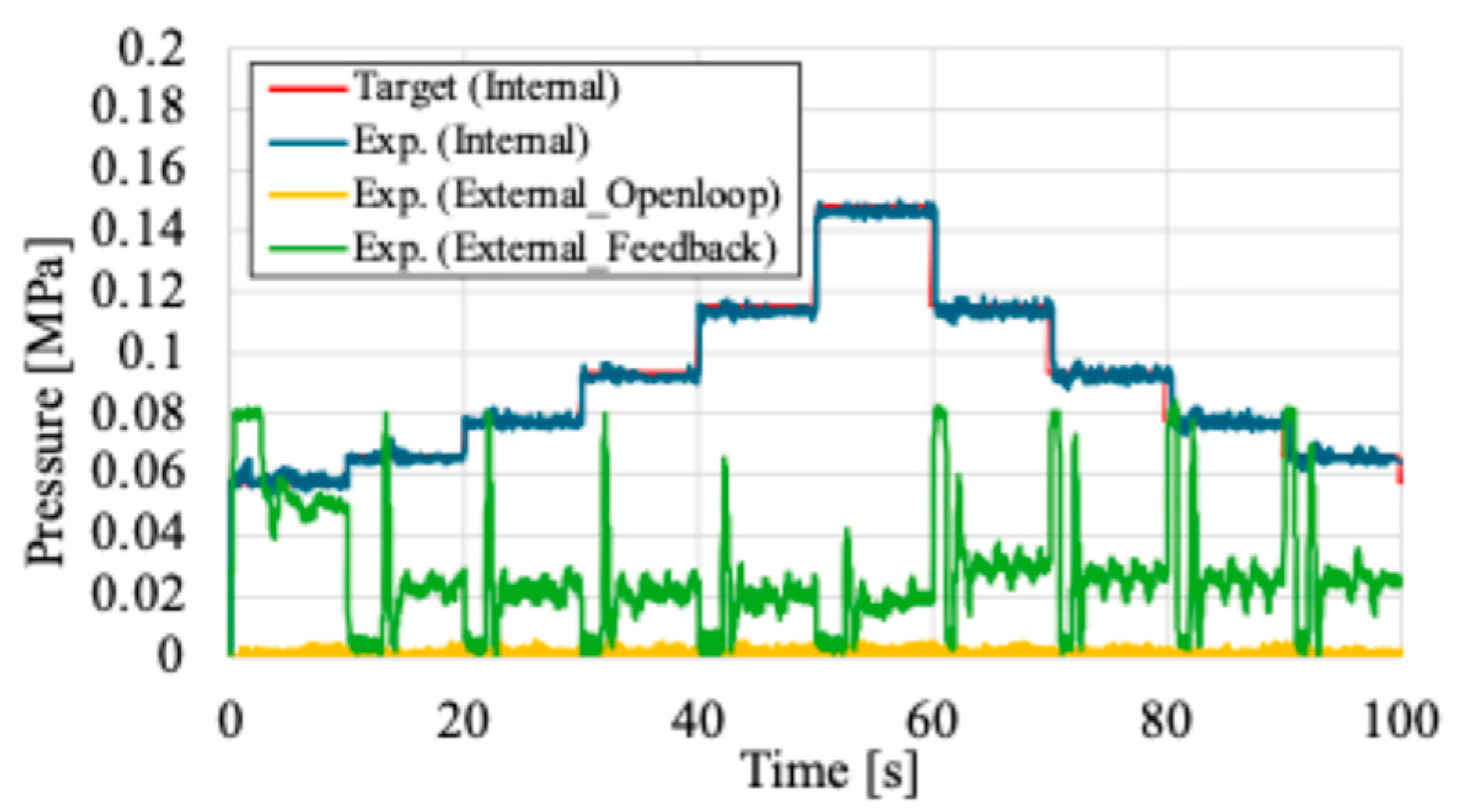
4.1. Hysteresis Elimination by Applying Feedback Control
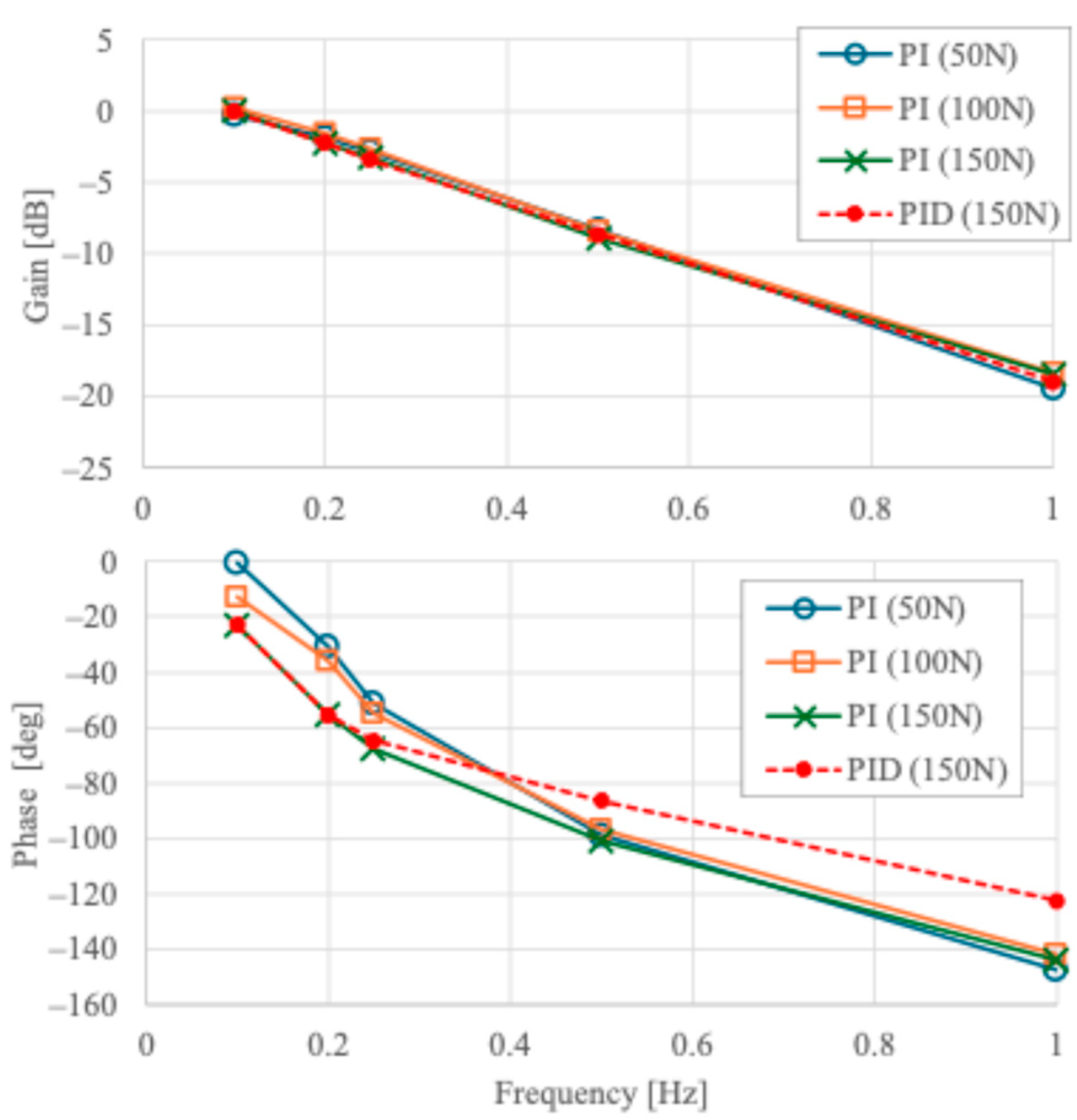
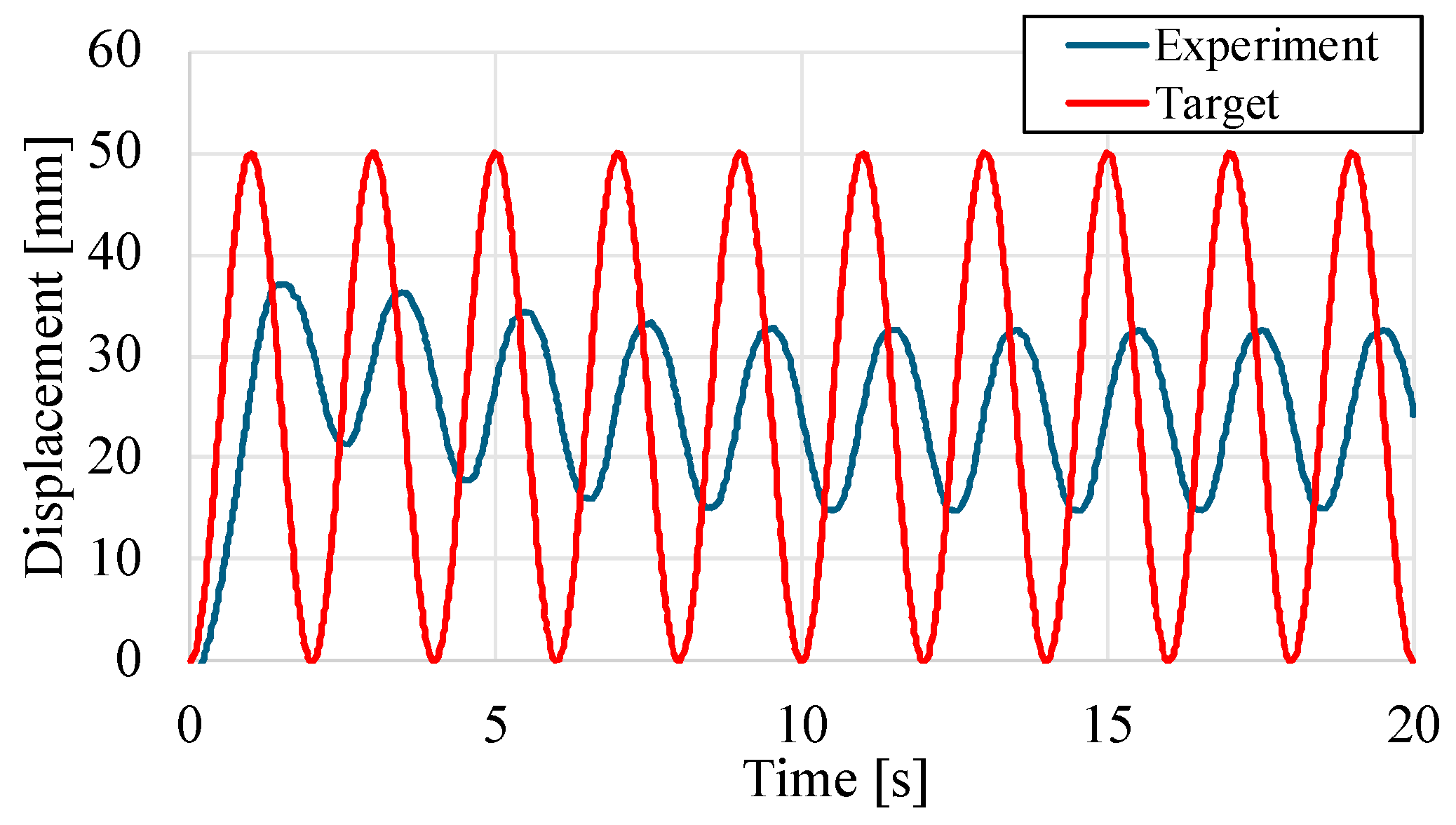
4.2. Frequency Response of Proposed Feedback Control
5. Conclusions
- Hysteresis was eliminated by controlling the amount of contraction using external pressure-regulated position feedback control of W-PAM.
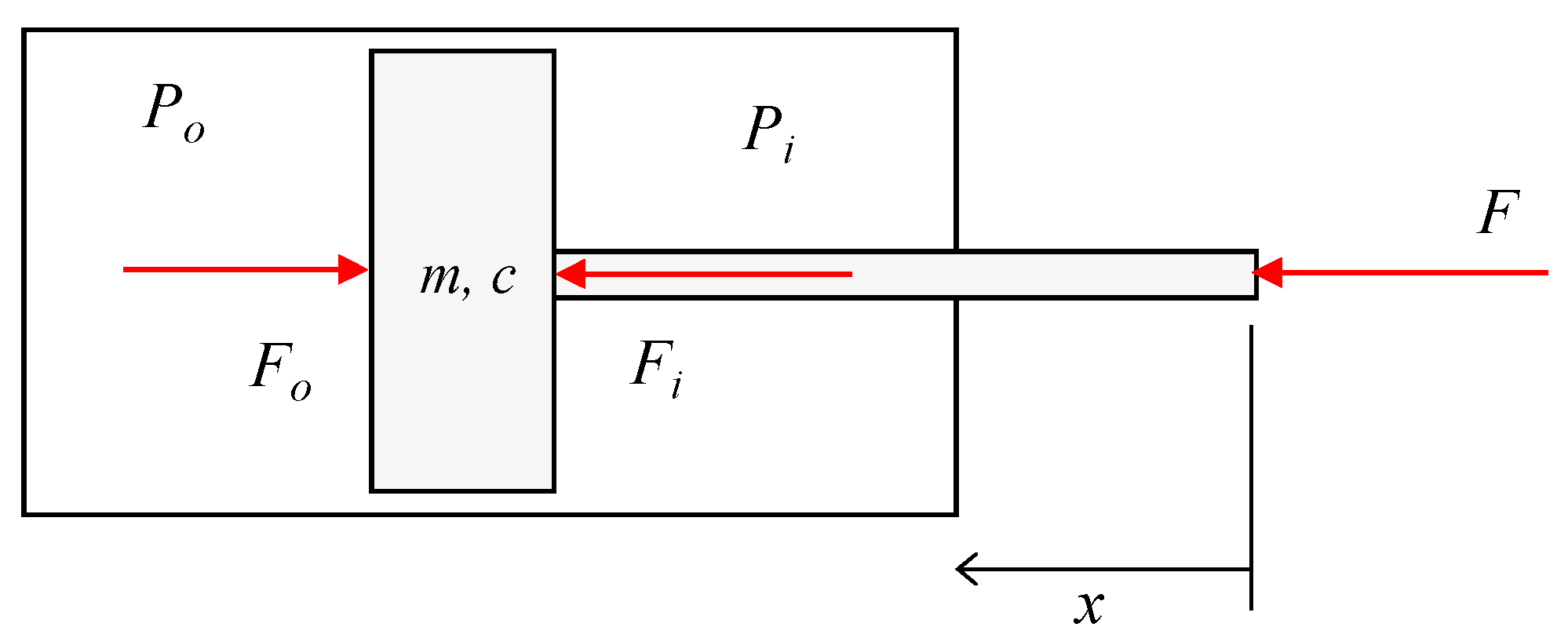
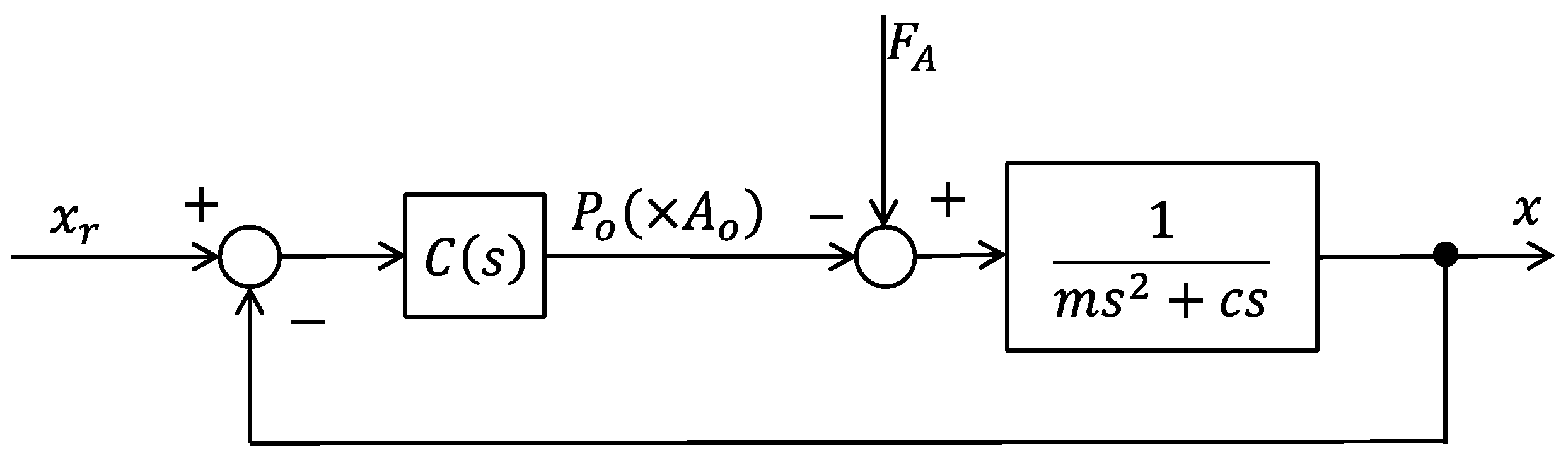
- The response of the external pressure-regulated position feedback control of W-PAM was predicted using a simplified double air chambers cylinder model, and the results showed that the characteristics were equivalent to those of the position feedback control of a type 1 system with input disturbance. The results of the analysis and experiments confirmed that the controller including an integrator can achieve good results without steady-state error and with good disturbance suppression characteristics.
- The position feedback control of W-PAM with external pressure operation was compared between PI and PID controllers and the results showed that the amplitude gain did not change, but the phase lag increased with increasing load. It was also confirmed that the phase lag was smaller with the PID controller.
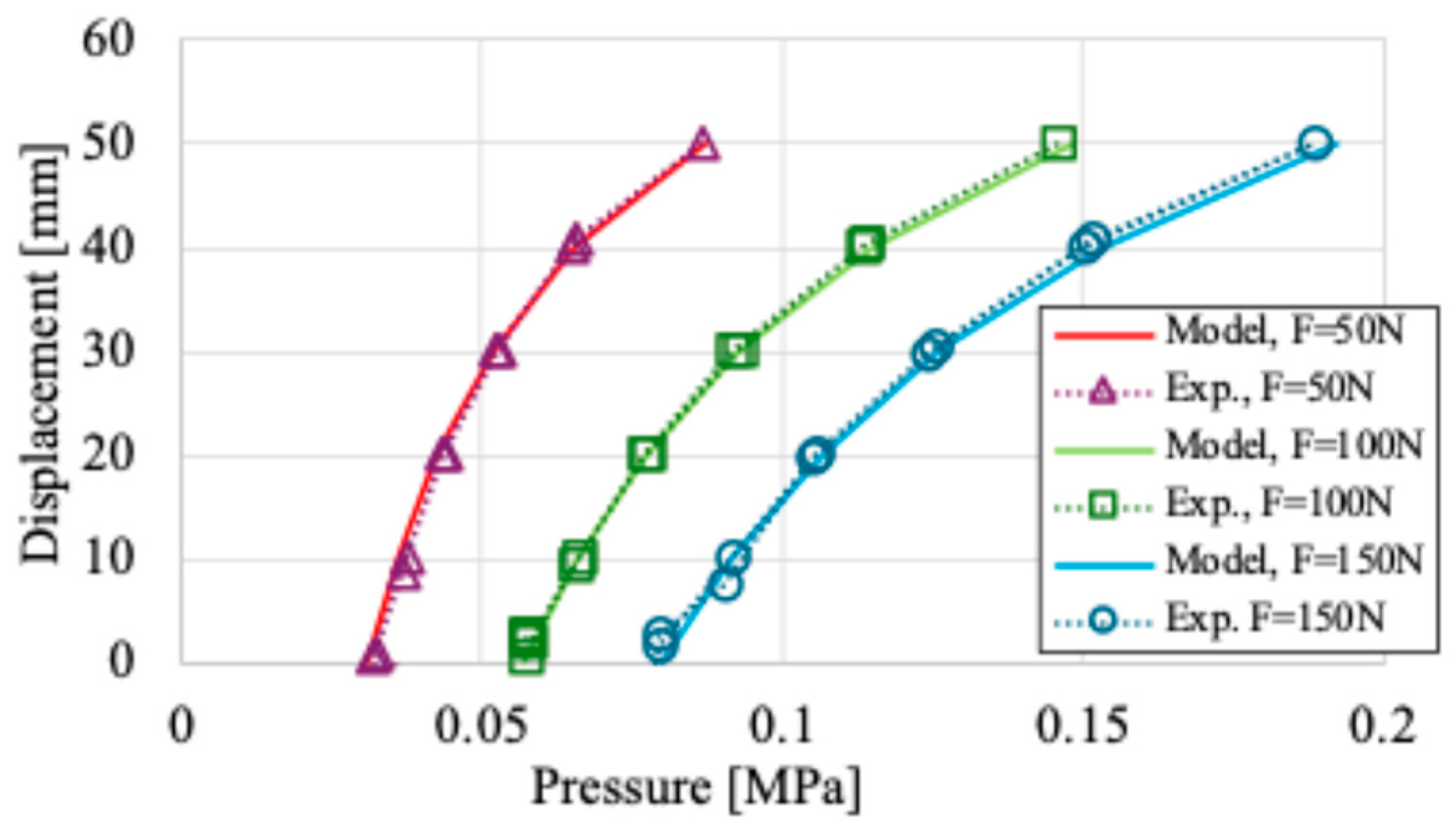
- It is indicated that W-PAM and the external pressure-regulated position feedback control are useful to represent the W-PAM in a mechanical equilibrium model and to obtain a response without hysteresis.
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Ohta, P.; Valle, L.; King, J.; Low, K.; Yi, J.; Atkeson, C.G.; Park, Y.-L. Design of a Lightweight Soft Robotic Arm Using Pneumatic Artificial Muscles and Inflatable Sleeves. Soft Robot. 2018, 5, 204–215. [Google Scholar] [CrossRef] [PubMed]
- Tondu, B.; Ippolito, S.; Guiochet, J.; Daidie, A. A Seven-Degrees-of-Freedom Robot-Arm Driven by Pneumatic Artificial Muscles for Humanoid Robots. Int. J. Robot. Res. 2005, 24, 257–274. [Google Scholar] [CrossRef]
- Zanchettin, A.M.; Bascetta, L.; Rocco, P. Acceptability of Robotic Manipulators in Shared Working Environments through Human-like Redundancy Resolution. Appl. Ergon. 2013, 44, 982–989. [Google Scholar] [CrossRef]
- Tsai, C.-S.; Hu, J.-S.; Tomizuka, M. Ensuring Safety in Human-Robot Coexistence Environment. In Proceedings of the 2014 IEEE/RSJ International Conference on Intelligent Robots and Systems, Chicago, IL, USA, 14–18 September 2014; pp. 4191–4196. [Google Scholar]
- Gopura, R.A.R.C.; Bandara, D.S.V.; Kiguchi, K.; Mann, G.K.I. Developments in Hardware Systems of Active Upper-Limb Exoskeleton Robots: A Review. Robot. Auton. Syst. 2016, 75, 203–220. [Google Scholar] [CrossRef]
- Young, A.J.; Ferris, D.P. State of the Art and Future Directions for Lower Limb Robotic Exoskeletons. IEEE Trans. Neural Syst. Rehabil. Eng. 2017, 25, 171–182. [Google Scholar] [CrossRef]
- Dollar, A.M.; Herr, H. Lower Extremity Exoskeletons and Active Orthoses: Challenges and State-of-the-Art. IEEE Trans. Robot. 2008, 24, 144–158. [Google Scholar] [CrossRef]
- Yan, T.; Cempini, M.; Oddo, C.M.; Vitiello, N. Review of Assistive Strategies in Powered Lower-Limb Orthoses and Exoskeletons. Robot. Auton. Syst. 2015, 64, 120–136. [Google Scholar] [CrossRef]
- Giovacchini, F.; Vannetti, F.; Fantozzi, M.; Cempini, M.; Cortese, M.; Parri, A.; Yan, T.; Lefeber, D.; Vitiello, N. A Light-Weight Active Orthosis for Hip Movement Assistance. Robot. Auton. Syst. 2015, 73, 123–134. [Google Scholar] [CrossRef]
- Asbeck, A.T.; De Rossi, S.M.M.; Holt, K.G.; Walsh, C.J. A Biologically Inspired Soft Exosuit for Walking Assistance. Int. J. Robot. Res. 2015, 34, 744–762. [Google Scholar] [CrossRef]
- Gorissen, B.; Reynaerts, D.; Konishi, S.; Yoshida, K.; Kim, J.-W.; De Volder, M. Elastic Inflatable Actuators for Soft Robotic Applications. Adv. Mater. 2017, 29, 1604977. [Google Scholar] [CrossRef]
- Nakamura, T. Fluid-Driven Soft Actuators for Soft Robots. J. Robot. Mechatron. 2024, 36, 251–259. [Google Scholar] [CrossRef]
- Polygerinos, P.; Correll, N.; Morin, S.A.; Mosadegh, B.; Onal, C.D.; Petersen, K.; Cianchetti, M.; Tolley, M.T.; Shepherd, R.F. Soft Robotics: Review of Fluid-Driven Intrinsically Soft Devices; Manufacturing, Sensing, Control, and Applications in Human-Robot Interaction. Adv. Eng. Mater. 2017, 19, 1700016. [Google Scholar] [CrossRef]
- Ling, Y.Y.; Leong, S.S.; Yee, Y.W. A Review of 3D Printing Processes and Materials for Soft Robotics. Rapid Prototyp. J. 2020, 26, 1345–1361. [Google Scholar] [CrossRef]
- Gul, J.Z.; Sajid, M.; Rehman, M.M.; Siddiqui, G.U.; Shah, I.; Kim, K.-H.; Lee, J.-W.; Choi, K.H. 3D Printing for Soft Robotics—A Review. Sci. Technol. Adv. Mater. 2018, 19, 243–262. [Google Scholar] [CrossRef]
- Lee, H.; Jang, Y.; Choe, J.K.; Lee, S.; Song, H.; Lee, J.P.; Lone, N.; Kim, J. 3D-Printed Programmable Tensegrity for Soft Robotics. Sci. Robot. 2020, 5, eaay9024. [Google Scholar] [CrossRef]
- Chou, C.-P.; Hannaford, B. Measurement and Modeling of McKibben Pneumatic Artificial Muscles. IEEE Trans. Robot. Autom. 1996, 12, 90–102. [Google Scholar] [CrossRef]
- Tondu, B. Analysis and Modeling of the Dynamic Behaviour of the McKibben Artificial Muscle. IFAC Proc. Vol. 1997, 30, 295–300. [Google Scholar] [CrossRef]
- Tondu, B.; Lopez, P. Modeling and Control of McKibben Artificial Muscle Robot Actuators. IEEE Control Syst. 2000, 20, 15–38. [Google Scholar] [CrossRef]
- Tondu, B. Modelling of the McKibben Artificial Muscle: A Review. J. Intell. Mater. Syst. Struct. 2012, 23, 225–253. [Google Scholar] [CrossRef]
- Tondu, B.; Lopez, P. The McKibben Muscle and Its Use in Actuating Robot-arms Showing Similarities with Human Arm Behaviour. Ind. Robot. Int. J. 1997, 24, 432–439. [Google Scholar] [CrossRef]
- Ferraresi, C.; Franco, W.; Bertetto, A.M. Straight Fibres Pneumatic Muscle: An Actuator with High Traction Force. In Proceedings of the Sixth International Conference on Fluid Power, Tampere, Finland, 26–28 May 1999; pp. 787–798. [Google Scholar]
- Durante, F.; Antonelli, M.G.; Beomonte Zobel, P.; Raparelli, T. A Procedure for the Fatigue Life Prediction of Straight Fibers Pneumatic Muscles. Actuators 2021, 10, 300. [Google Scholar] [CrossRef]
- Durante, F.; Antonelli, M.; Zobel, P.B.; Raparelli, A. Development of a Straight Fibers Pneumatic Muscle. Int. J. Autom. Technol. 2018, 12, 413–423. [Google Scholar] [CrossRef]
- Kojima, A.; Okui, M.; Hisamichi, I.; Tsuji, T.; Nakamura, T. Straight-Fiber-Type Artificial Muscle Deformation Under Pressurization. IEEE Robot. Autom. Lett. 2019, 4, 2592–2598. [Google Scholar] [CrossRef]
- Nakamura, T.; Shinohara, H. Position and Force Control Based on Mathematical Models of Pneumatic Artificial Muscles Reinforced by Straight Glass Fibers. In Proceedings of the 2007 IEEE International Conference on Robotics and Automation, Rome, Italy, 10–14 April 2007; pp. 4361–4366. [Google Scholar]
- Sato, T.; Saito, N.; Ogasawara, T.; Sato, T. Development of Rubberless Artificial Muscle and Fundamental Characteristics. In Proceedings of the IECON 2011-37th Annual Conference of the IEEE Industrial Electronics Society, Melbourne, VIC, Australia, 7–10 November 2011; pp. 2124–2129. [Google Scholar]
- Saito, N.; Sato, T.; Ogasawara, T.; Takahashi, R.; Sato, T. Mechanical Equilibrium Model of Rubberless Artificial Muscle and Application to Position Control of Antagonistic Drive System. Ind. Robot. Int. J. 2013, 40, 347–354. [Google Scholar] [CrossRef]
- Saito, N.; Satoh, T. Structure of a Rubberless Artificial Muscle and Evaluation of a Lifetime. In Proceedings of the IECON 2016-42nd Annual Conference of the IEEE Industrial Electronics Society, Florence, Italy, 23–26 October 2016; pp. 648–653. [Google Scholar]
- Saito, N.; Satoh, T. Force and Position Control of Rubberless Artificial Muscle Antagonistic Drive System. JFPS Int. J. Fluid Power Syst. 2014, 8, 44–51. [Google Scholar] [CrossRef]
- Daerden, F.; Lefeber, D. The Concept and Design of Pleated Pneumatic Artificial Muscles. Int. J. Fluid Power 2001, 2, 41–50. [Google Scholar] [CrossRef]
- Verrelst, B.; Van Ham, R.; Vanderborght, B.; Lefeber, D.; Daerden, F.; Van Damme, M. Second Generation Pleated Pneumatic Artificial Muscle and Its Robotic Applications. Adv. Robot. 2006, 20, 783–805. [Google Scholar] [CrossRef]
- Drozdov, A.D.; Christiansen, J.D. Constitutive Equations for the Nonlinear Elastic Response of Rubbers. Acta Mech. 2006, 185, 31–65. [Google Scholar] [CrossRef]
- Saito, N.; Satoh, T. Posture Control Considering Joint Stiffness of a Robotic Arm Driven by Rubberless Artificial Muscle. Int. J. Autom. Technol. 2016, 10, 503–510. [Google Scholar] [CrossRef]
- Al-Fahaam, H.; Nefti-Meziani, S.; Theodoridis, T.; Davis, S. The Design and Mathematical Model of a Novel Variable Stiffness Extensor-Contractor Pneumatic Artificial Muscle. Soft Robot. 2018, 5, 576–591. [Google Scholar] [CrossRef]
- Hassan, T.; Cianchetti, M.; Moatamedi, M.; Mazzolai, B.; Laschi, C.; Dario, P. Finite-Element Modeling and Design of a Pneumatic Braided Muscle Actuator With Multifunctional Capabilities. IEEE/ASME Trans. Mechatron. 2019, 24, 109–119. [Google Scholar] [CrossRef]
- Zheng, H.; Shen, X. Double-Acting Sleeve Muscle Actuator for Bio-Robotic Systems. Actuators 2013, 2, 129–144. [Google Scholar] [CrossRef] [PubMed]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Symbol | Meaning |
|---|---|
| Internal pressure | |
| Pressure outside of the air chamber | |
| Atmospheric pressure | |
| Force in the direction to inflate air chamber | |
| Force in the direction to contraction air chamber | |
| External force received from load | |
| Frictional force between air chamber and mesh sleeve | |
| Friction coefficient | |
| Effective surface area of air chamber | |
| Output adjustment coefficient 1 | |
| Internal pressure when PAM extends | |
| Internal pressure when PAM contracts |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Saito, N.; Satoh, T.; Saga, N. Double Air Chambers Pneumatic Artificial Muscle and Non-Hysteresis Position Control. Actuators 2024, 13, 282. https://doi.org/10.3390/act13080282
Saito N, Satoh T, Saga N. Double Air Chambers Pneumatic Artificial Muscle and Non-Hysteresis Position Control. Actuators. 2024; 13(8):282. https://doi.org/10.3390/act13080282
Chicago/Turabian StyleSaito, Naoki, Toshiyuki Satoh, and Norihiko Saga. 2024. "Double Air Chambers Pneumatic Artificial Muscle and Non-Hysteresis Position Control" Actuators 13, no. 8: 282. https://doi.org/10.3390/act13080282
APA StyleSaito, N., Satoh, T., & Saga, N. (2024). Double Air Chambers Pneumatic Artificial Muscle and Non-Hysteresis Position Control. Actuators, 13(8), 282. https://doi.org/10.3390/act13080282