
Backlash Elimination Control for Robotic Joints with Dual–Motor Drive

Abstract
:1. Introduction
2. Variable Bias Torque Control Method
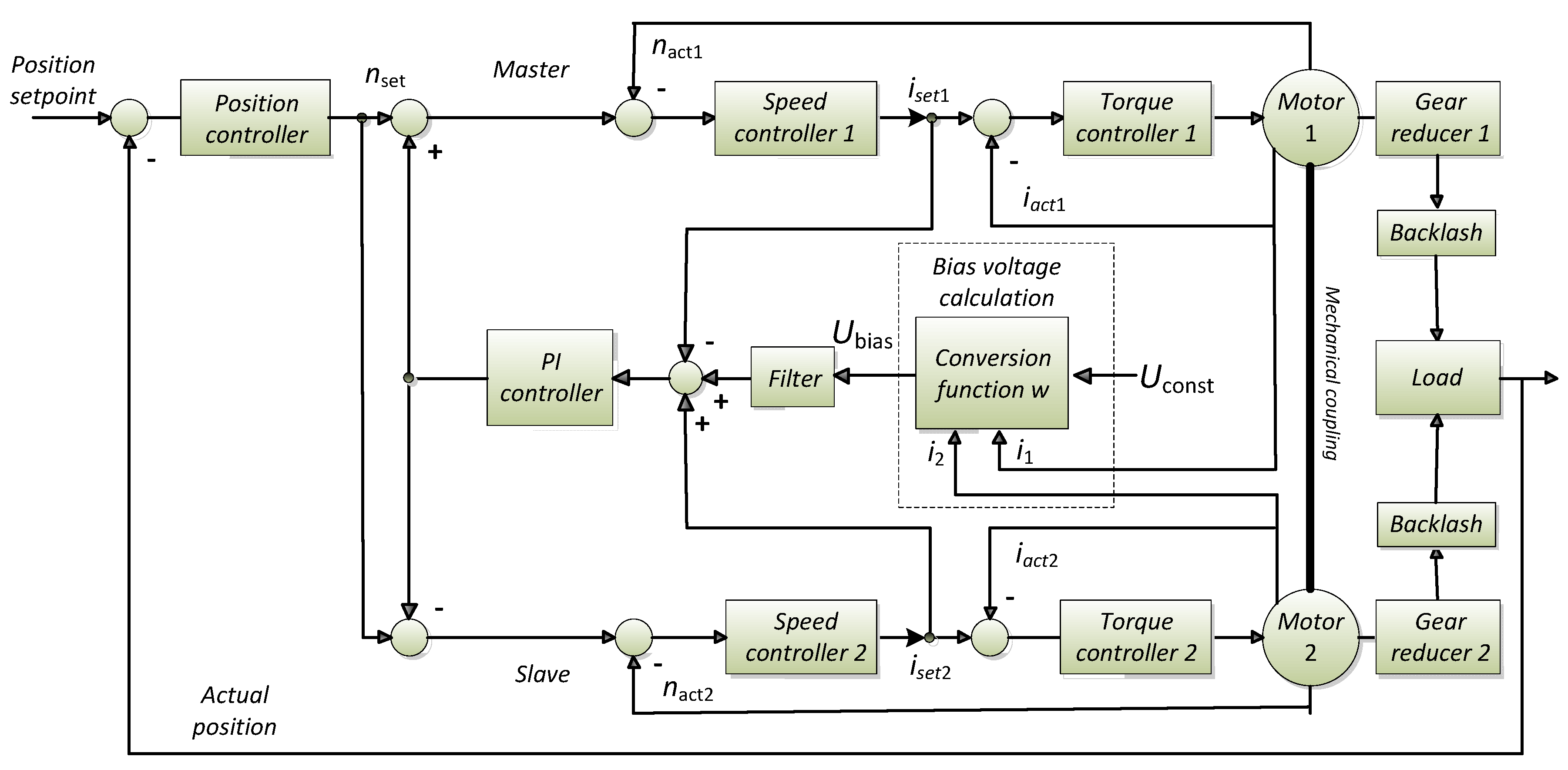
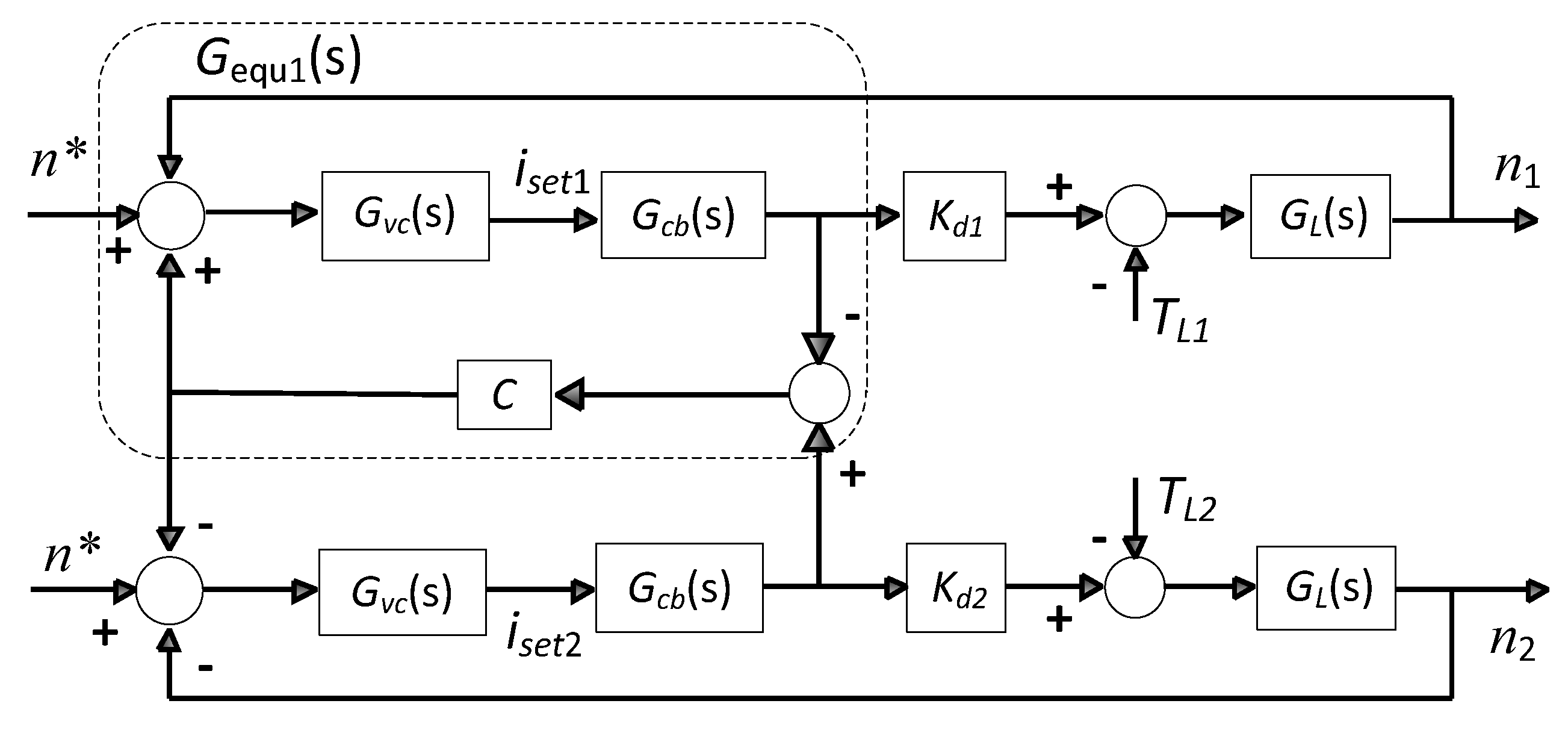
2.1. Control Scheme of the Dual–Motor Drive System
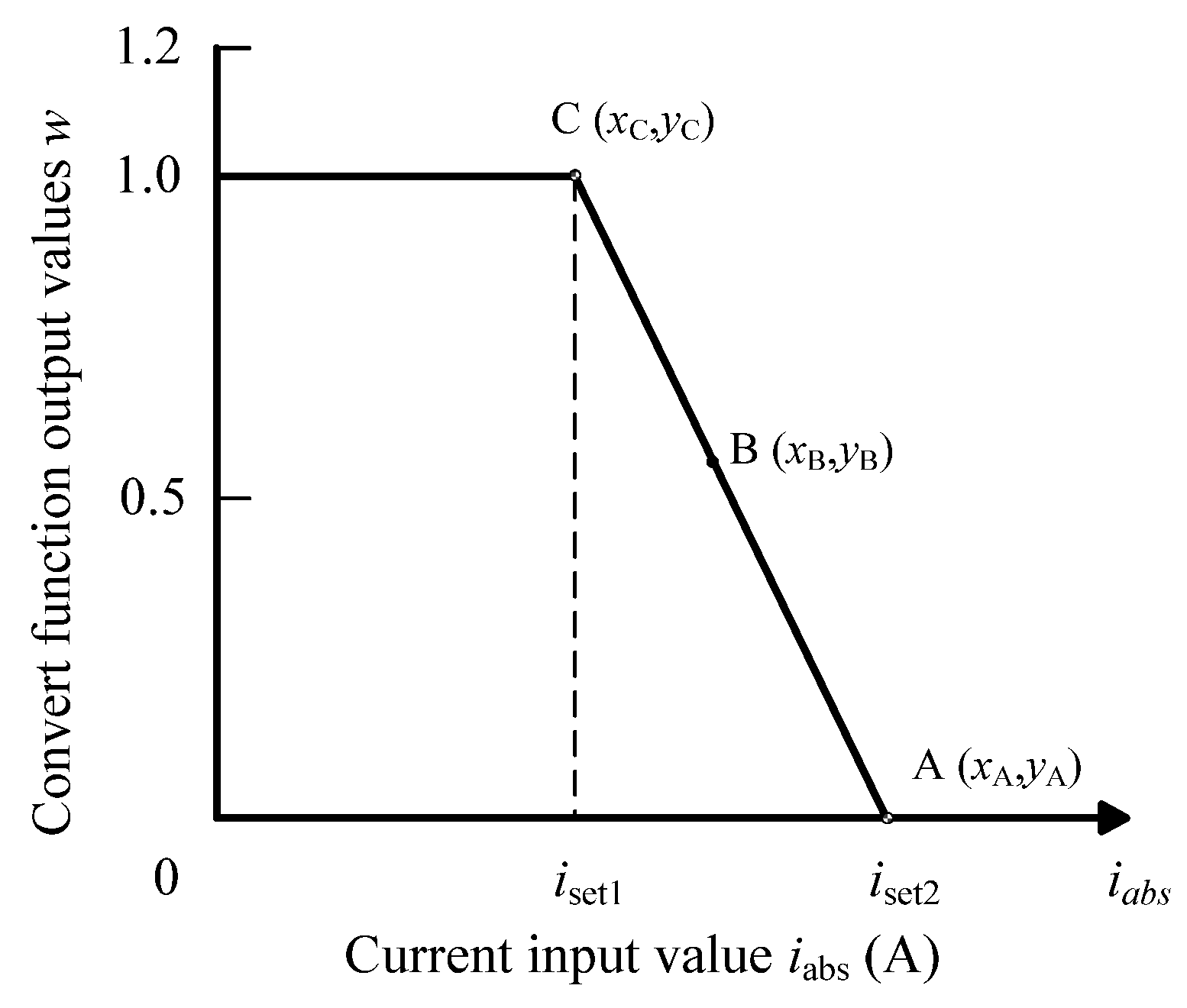
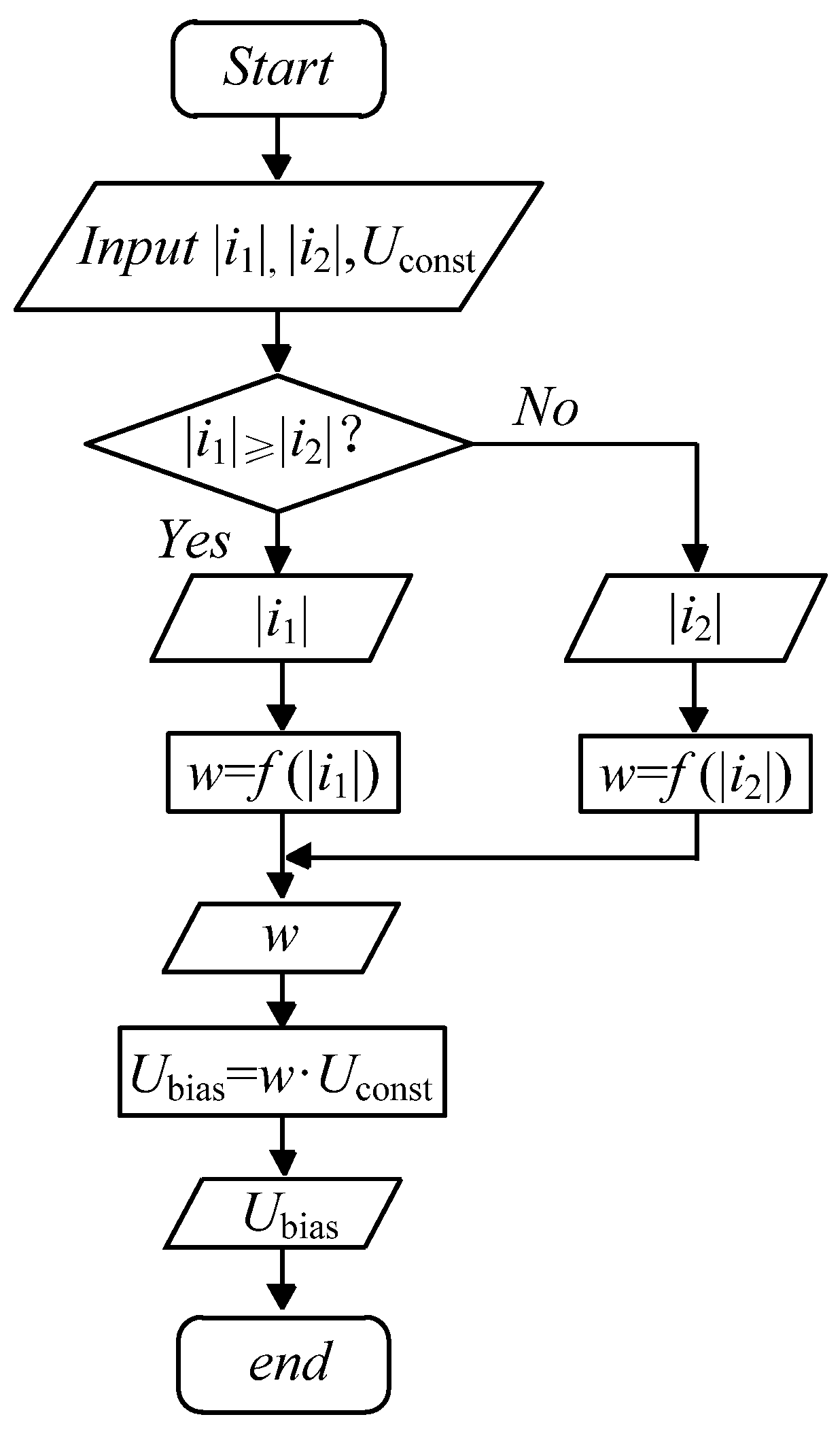
2.2. Calculation of Backlash Elimination Bias Voltage
2.3. Method of Selecting the Current Setting Value
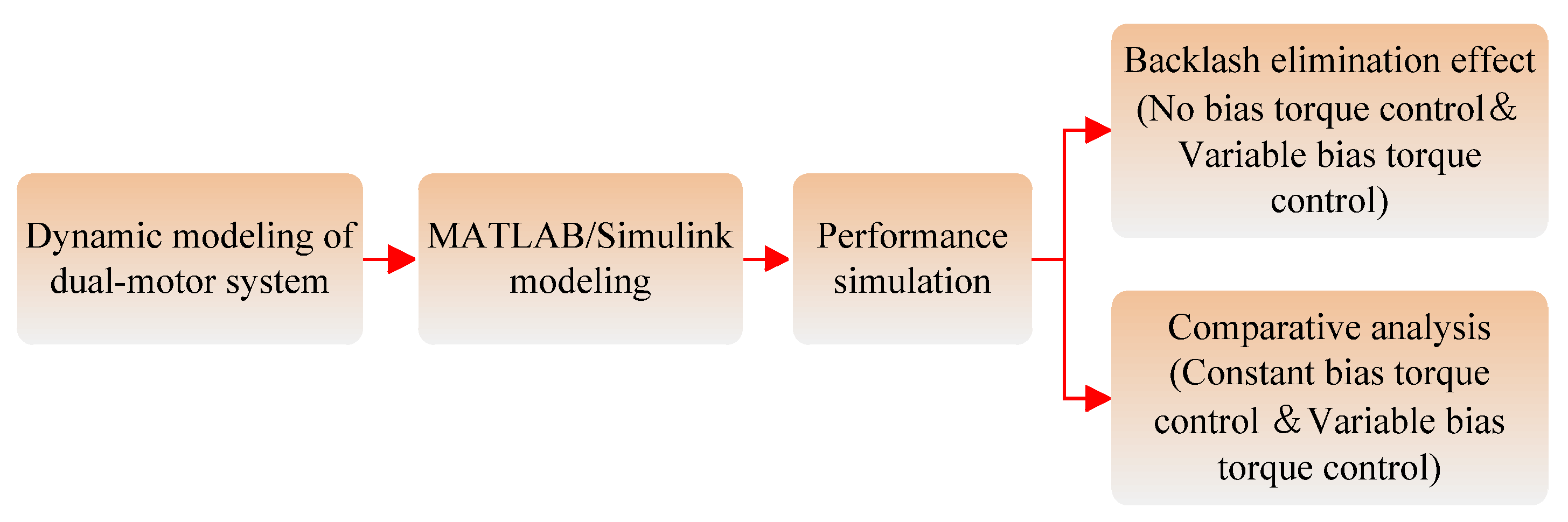
3. Dynamic Modeling and Simulation
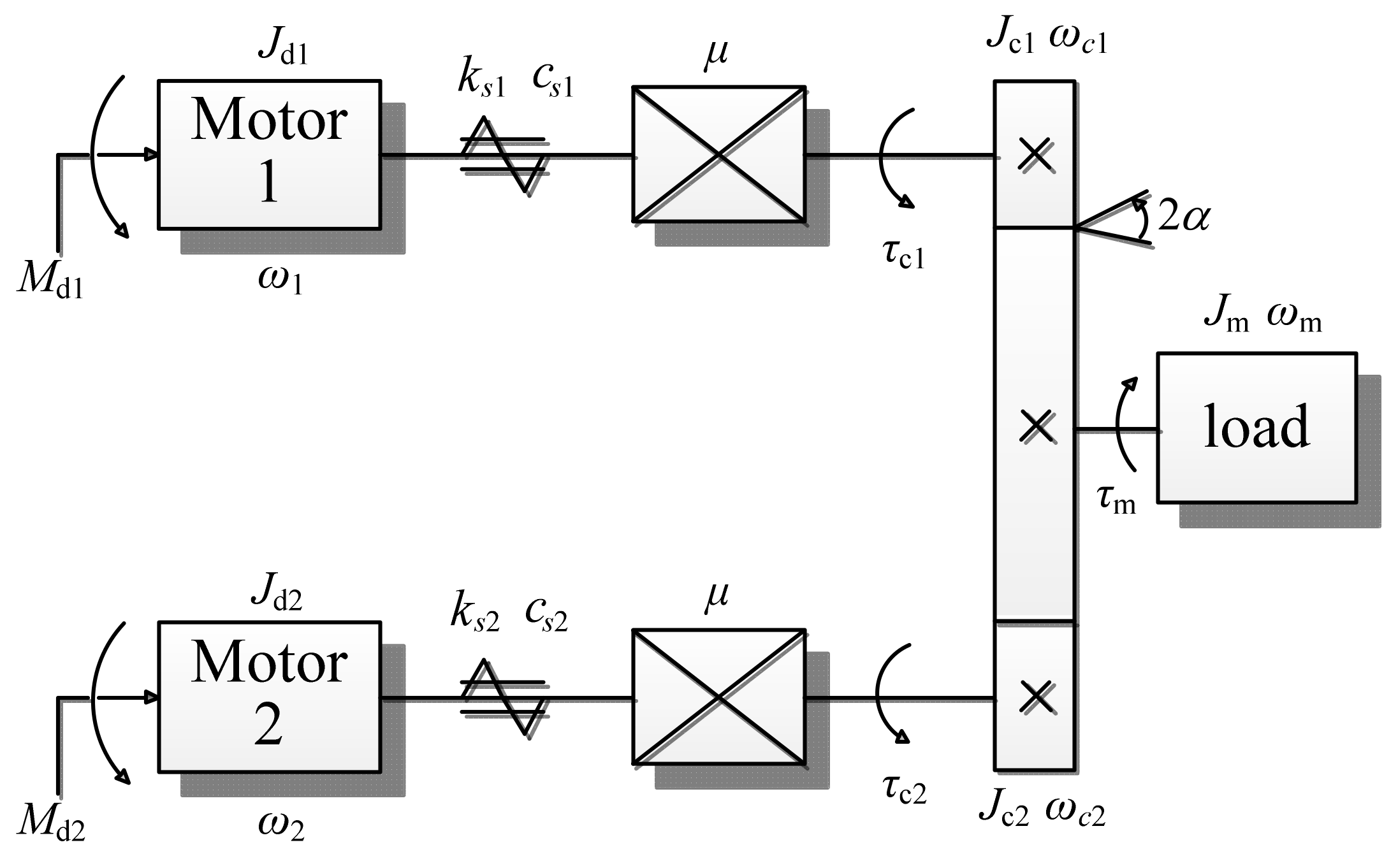
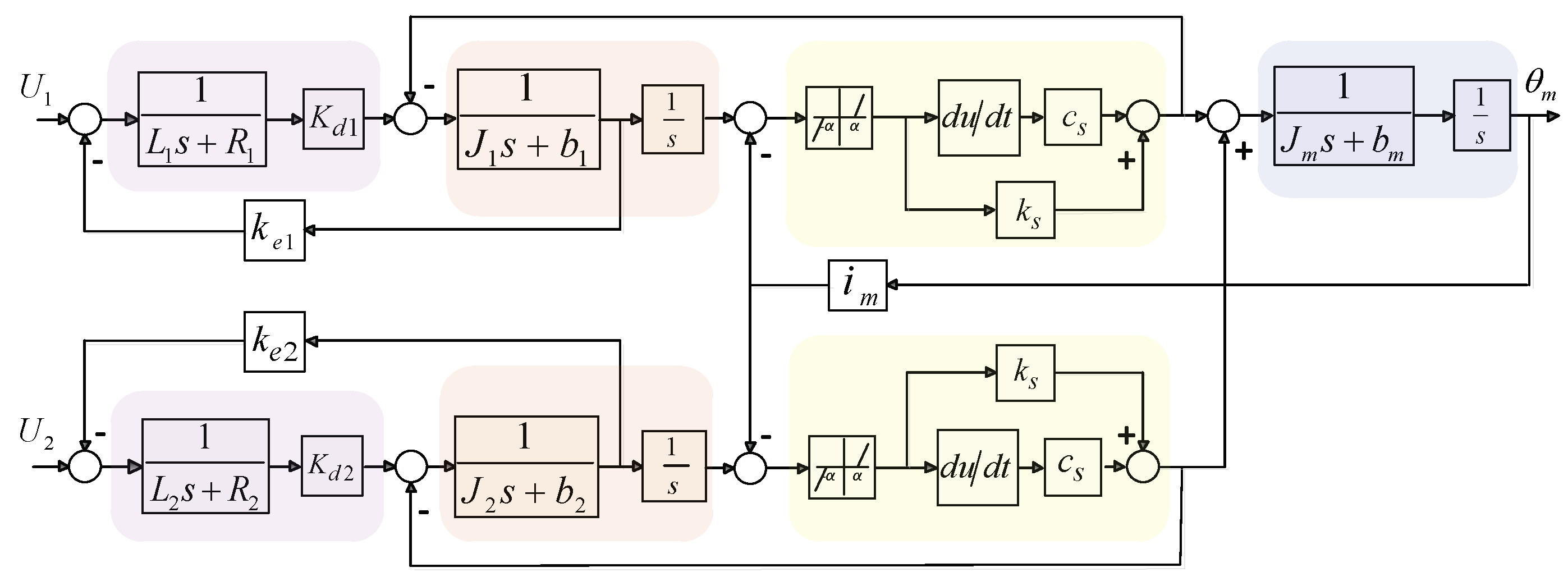
3.1. Dynamics Modeling of the Dual–Motor Drive System
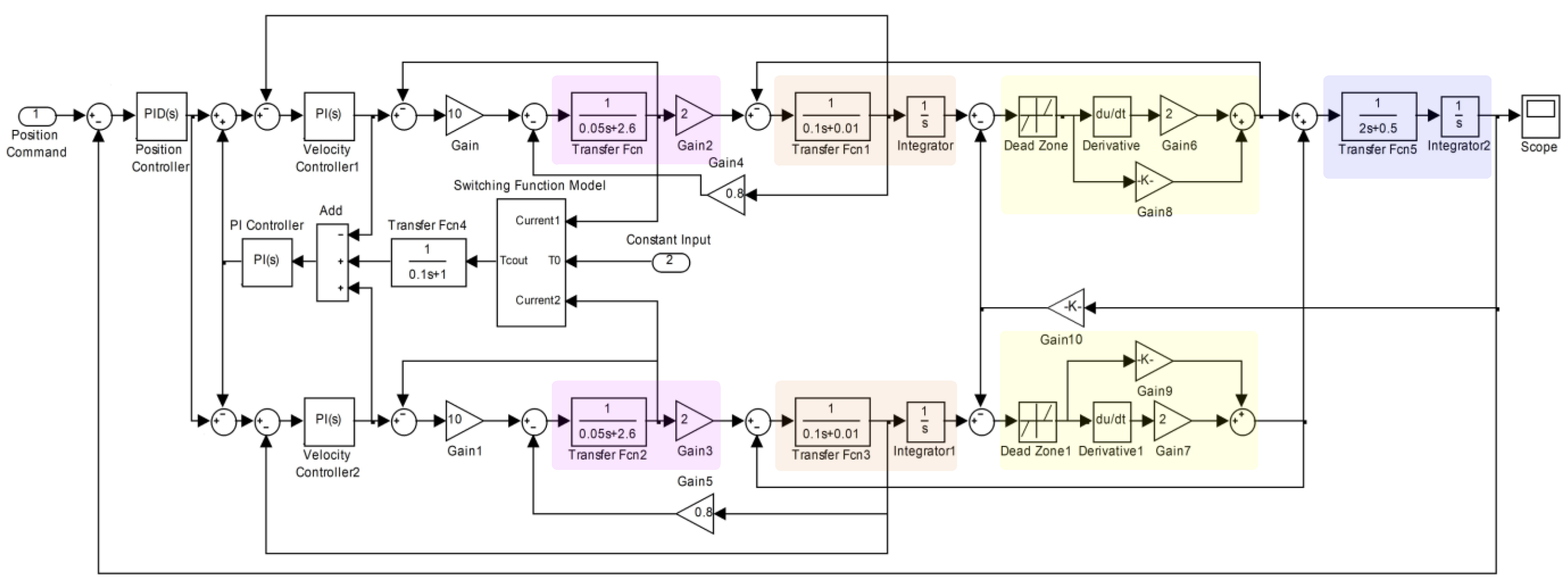
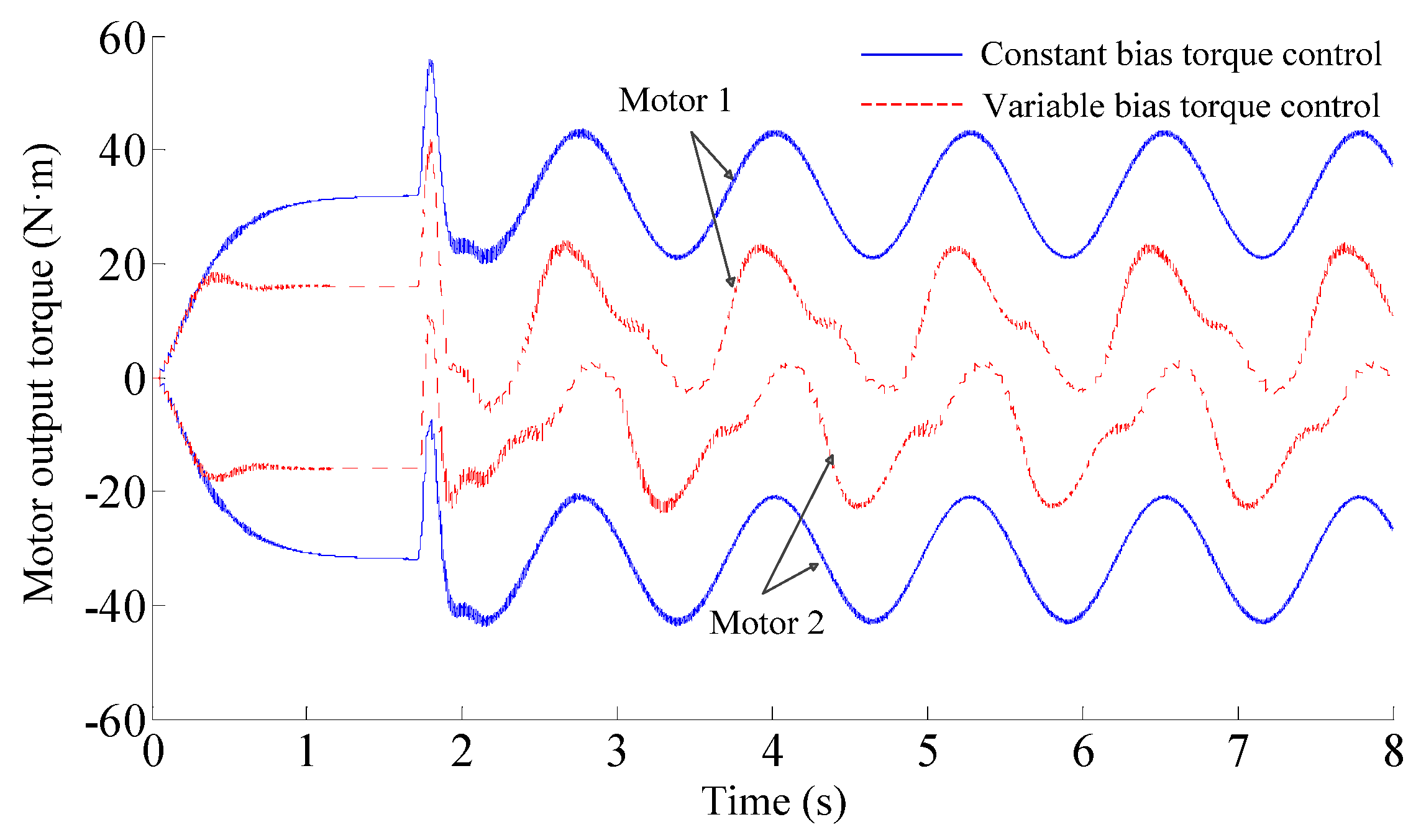
3.2. Simulation of the Backlash Elimination Performance
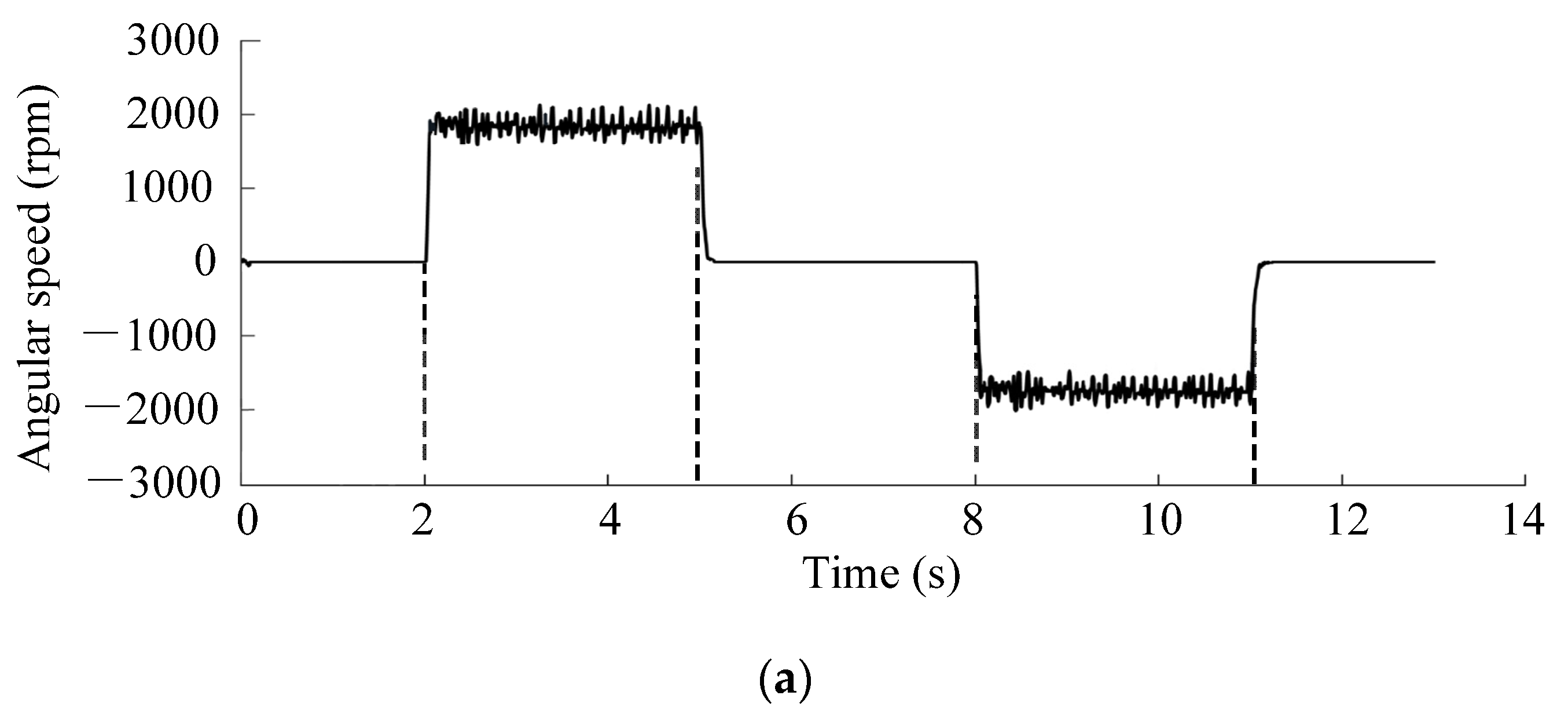
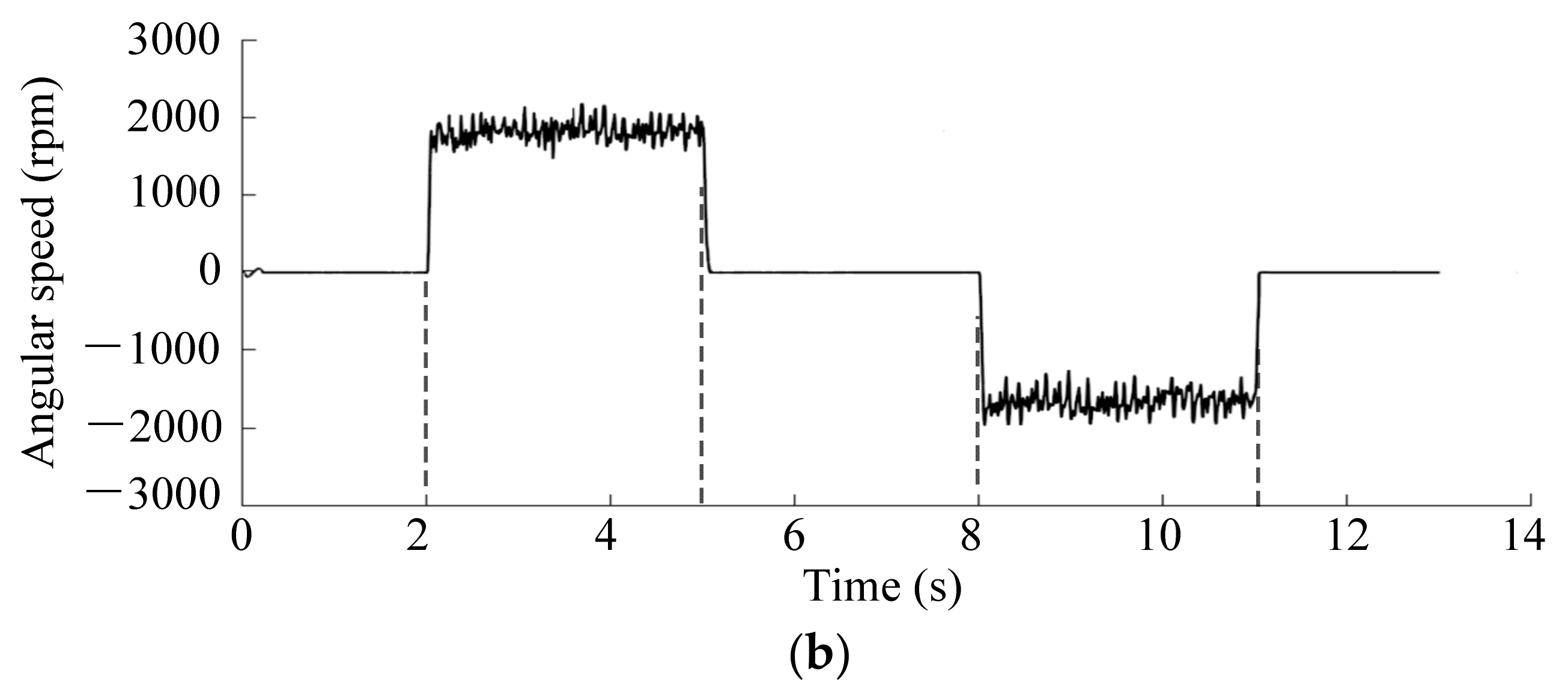
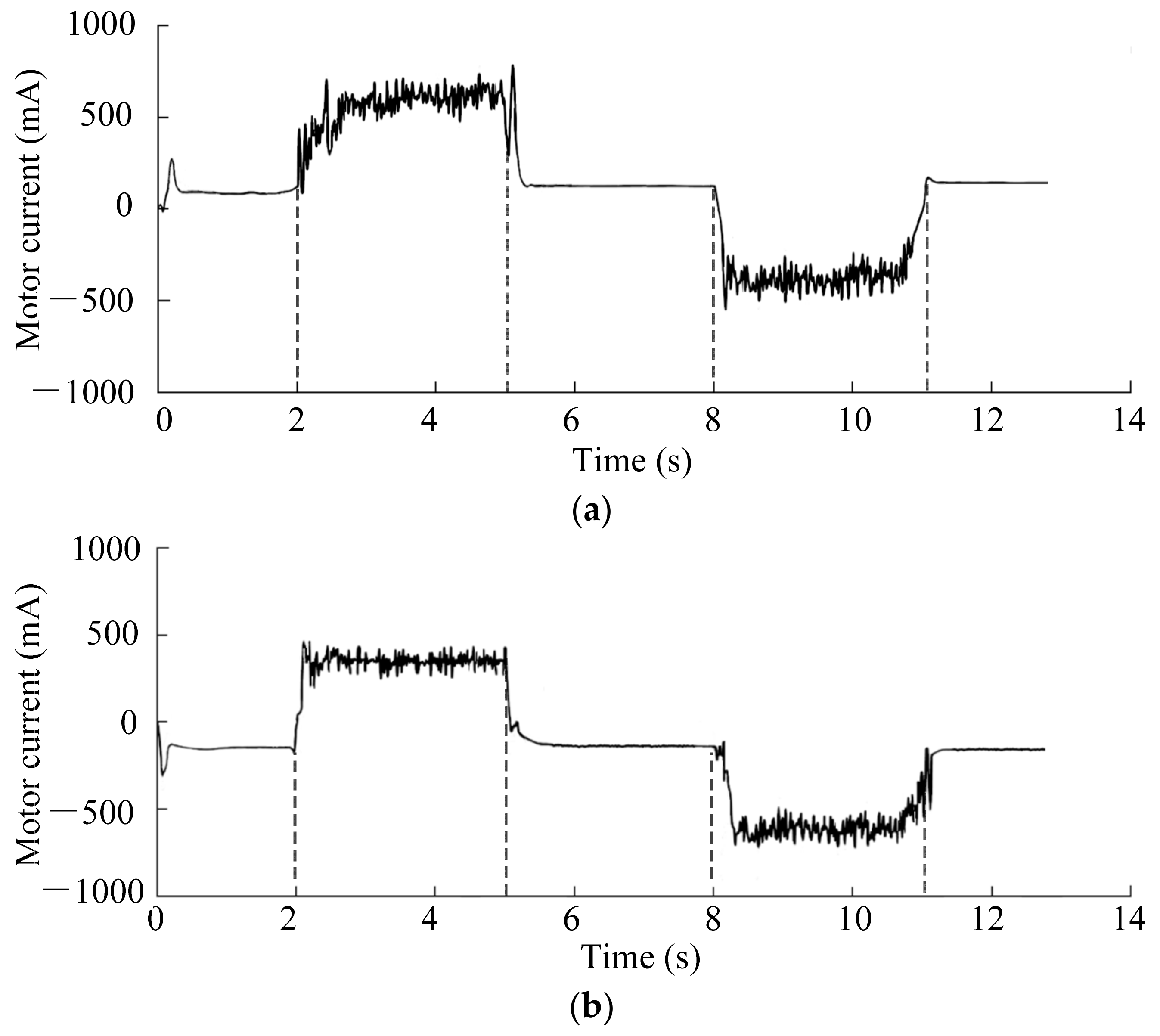
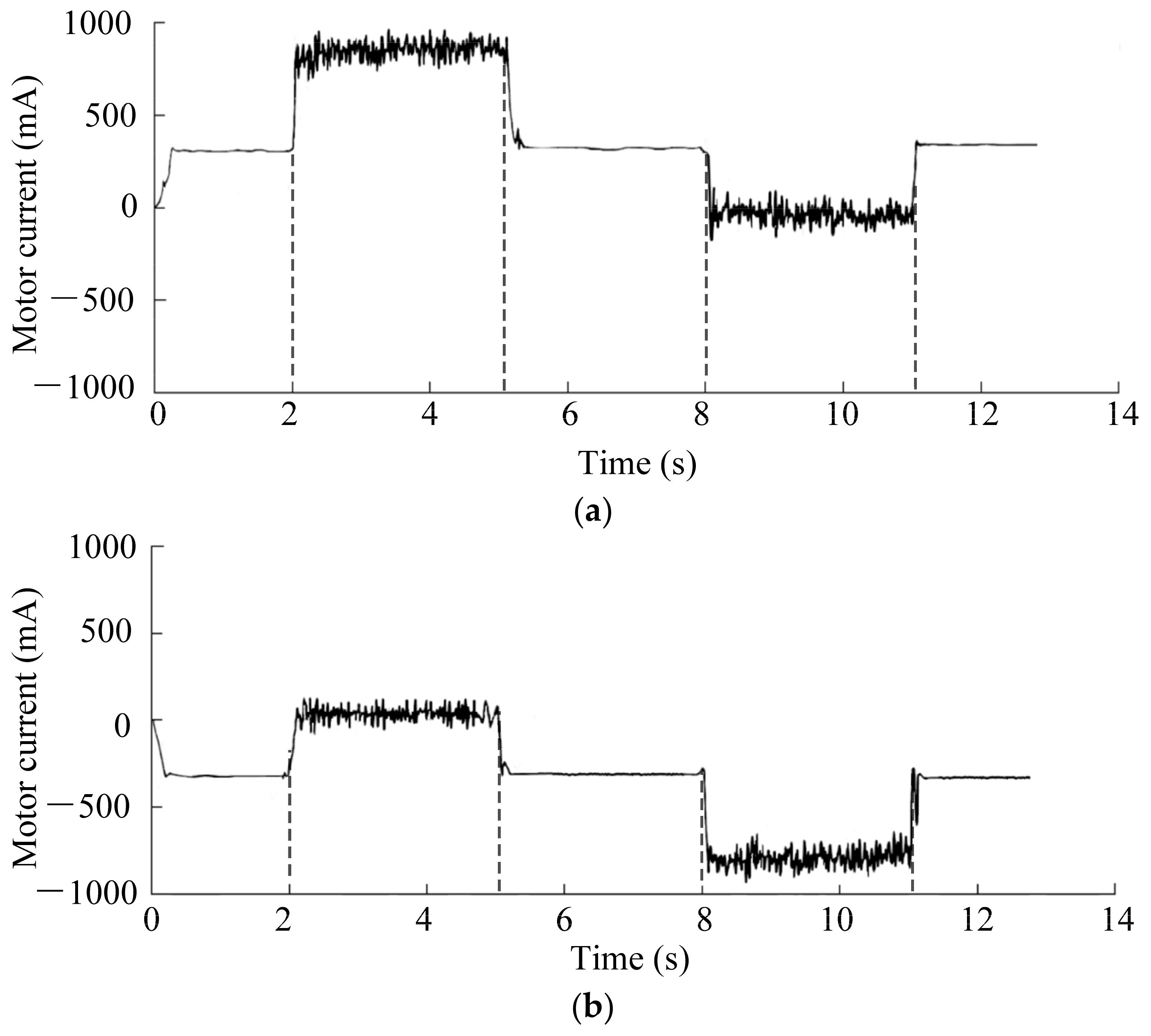
4. Experimental Verifications
4.1. Description of Robot Joint Test Bench
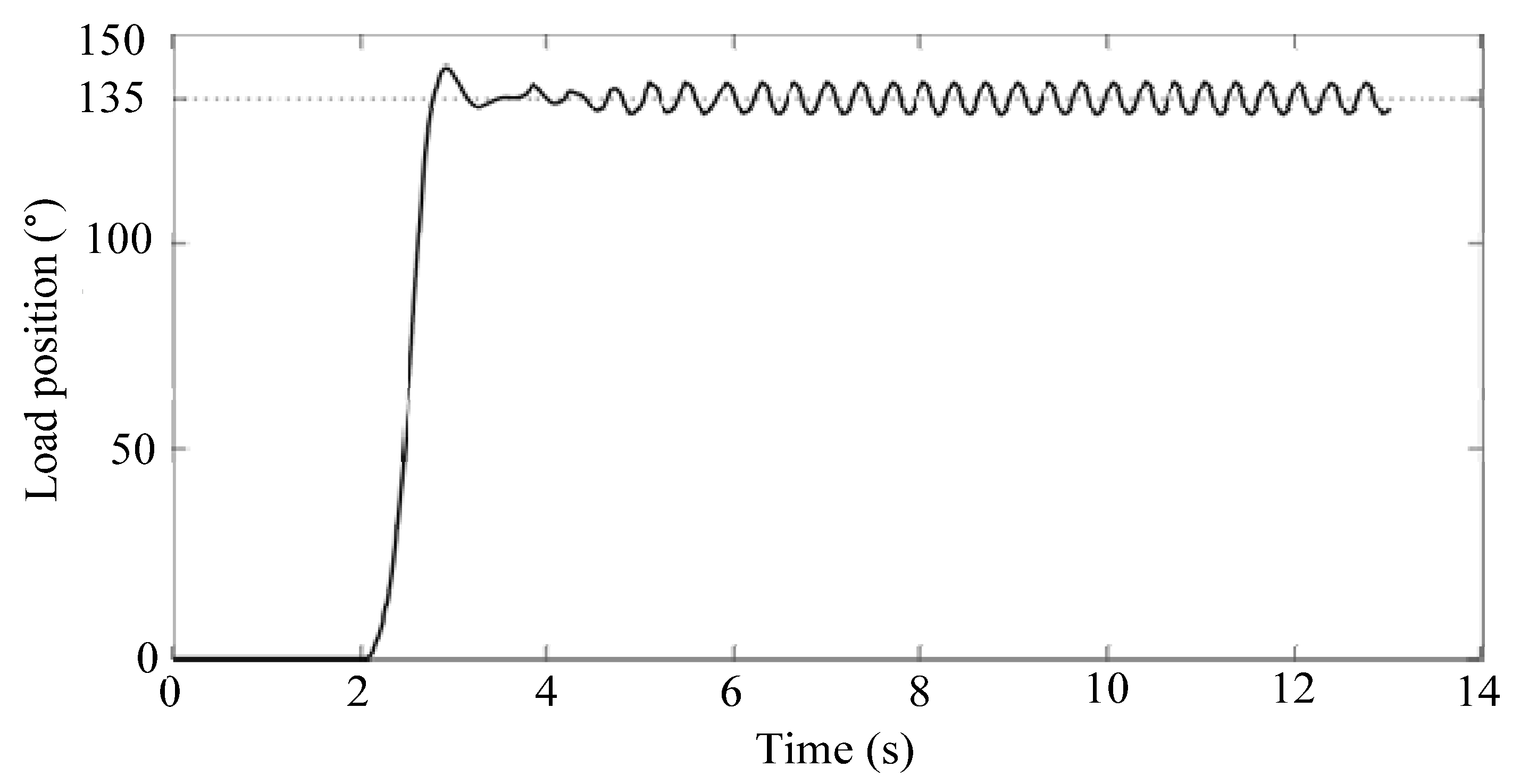
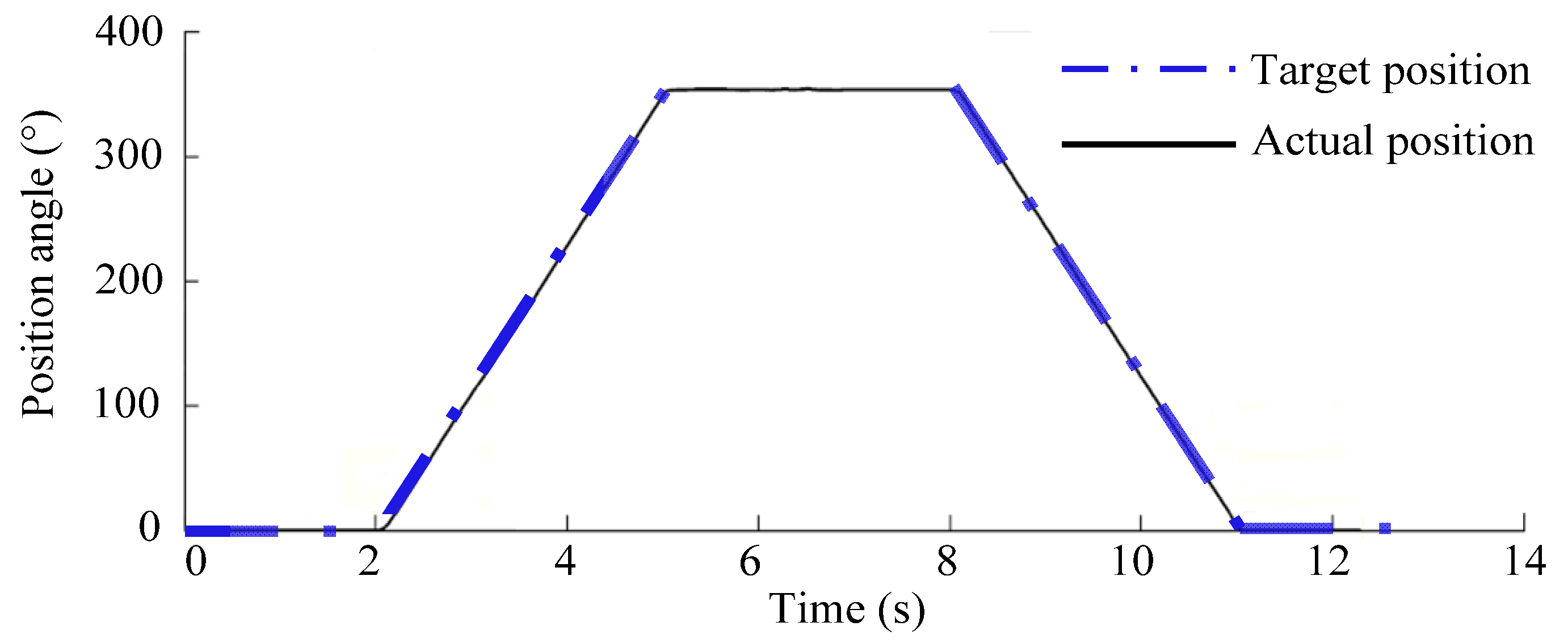
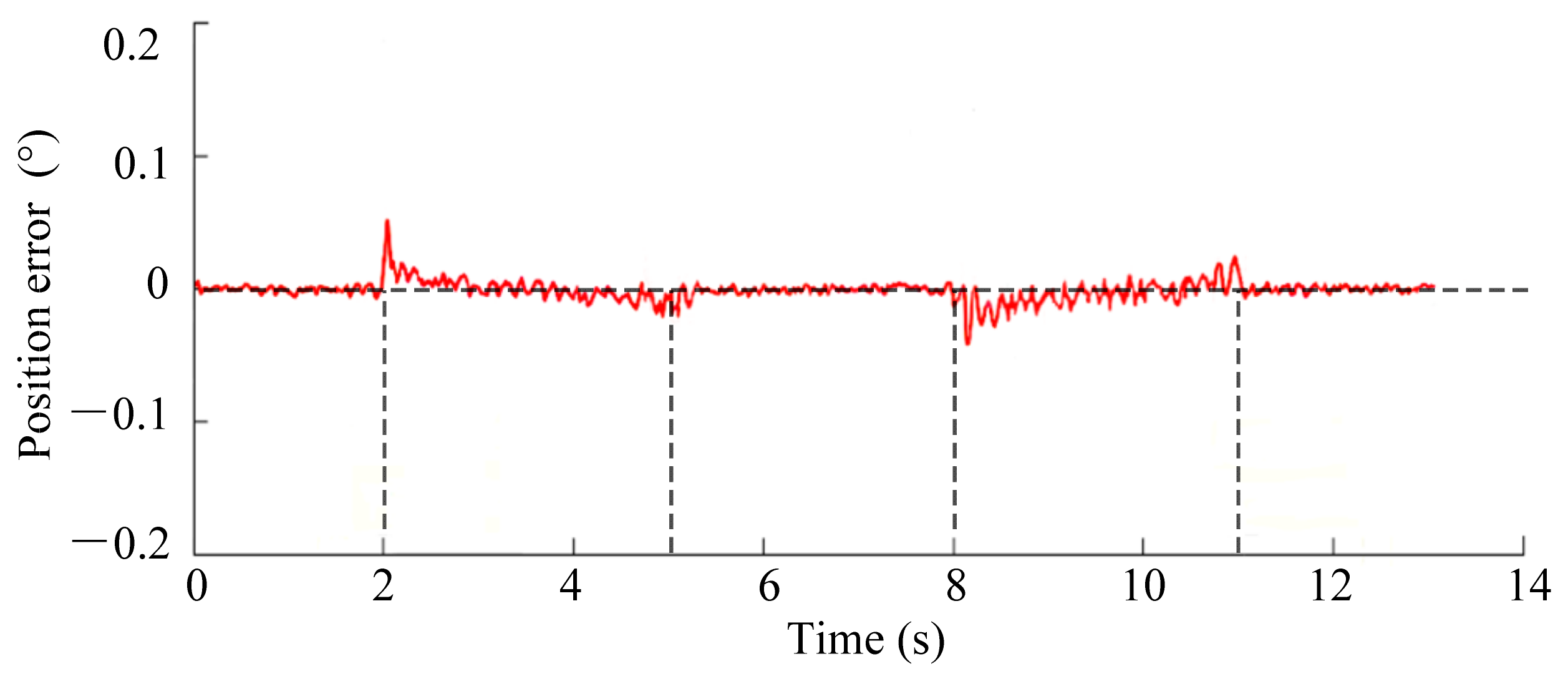
4.2. Results and Discussions
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Gan, L.; Wang, L.P.; Huang, F. Adaptive backlash compensation for CNC machining applications. Machines 2023, 11, 193. [Google Scholar] [CrossRef]
- Gu, Y.K.; Li, W.F.; Zhang, J.; Qiu, G.Q. Effects of wear, backlash and bearing clearance on dynamic characteristics of a spur gear system. IEEE Access 2019, 7, 117639–117651. [Google Scholar] [CrossRef]
- Sun, L.; Li, X.X.; Chen, L.M.; Shi, H.; Jiang, Z.C. Dual–motor coordination for high–quality servo with transmission backlash. IEEE T. Ind. Electron. 2023, 70, 1182–1196. [Google Scholar] [CrossRef]
- Yang, X.; Lu, D.; Zhang, J.; Zhao, W.H. Analysis on steady–state vibration induced by backlash in machine tool rotary table. Proc. Inst. Mech. Eng. Part C J. Mech. Eng. Sci. 2017, 231, 4163–4171. [Google Scholar] [CrossRef]
- Shi, J.F.; Gou, X.F.; Zhu, L.Y. Modeling and analysis of a spur gear pair considering multi–state mesh with time–varying parameters and backlash. Mech. Mach. Theory 2019, 134, 582–603. [Google Scholar] [CrossRef]
- Zhang, H.; Wang, J.; He, G. A comparative investigation of meshing characteristics of anti–backlash single–and double–roller enveloping hourglass worm gears. J. Adv. Mech. Des. Syst. 2019, 13, 1–19. [Google Scholar] [CrossRef]
- Yu, L.; Wang, G.L.; Zou, S.D. The experimental research on gear eccentricity error of backlash–compensation gear device based on transmission error. Int. J. Precis. Eng. Man. 2018, 19, 5–12. [Google Scholar] [CrossRef]
- Wang, G.J.; Zhu, D.D.; Zou, S.D.; Jiang, Y.J.; Tian, X. Simulation and experimental research on electrical control anti–backlash based on a novel type of variable tooth thickness involute gear pair. Stroj. Vestn. J. Mech. Eng. 2022, 68, 26–140. [Google Scholar] [CrossRef]
- Li, F.J.; Wang, S.J.; Li, H. Backstepping integral nonsingular terminal sliding mode based fault–tolerant control of dual–motor synchronous anti–backlash servo system with extended state observer. In Proceedings of the 2021 China Automation Congress, Beijing, China, 22–24 October 2021; pp. 3831–3838. [Google Scholar]
- Xu, J.Q.; Fang, L.J.; Zhao, Q.K.; Wang, H.Z. Linear active disturbance rejection anti–backlash control for dual–motor coaxial driving robotic joint. In Proceedings of the 34th Chinese Control and Decision Conference (CCDC), Hefei, China, 15–17 August 2022; pp. 4289–4294. [Google Scholar]
- Qiu, X.B.; Cui, Y.Q.; Shan, D.S.; Zhang, C. Research on anti–backlash control strategy of asymmetric dual–motor driving system based on a small power auxiliary motor. In Proceedings of the 2017 International Conference on Computer System, Electronics and Control (ICCSEC), Dalian, China, 25–27 December 2017; pp. 174–177. [Google Scholar]
- Jiang, H.; Fu, H.Y.; Han, Z.Y.; Jin, H.Y. Elimination of Gear Clearance for the rotary table of ultra heavy duty vertical milling lathe based on dual servo motor driving system. Appl. Sci. 2020, 10, 4050. [Google Scholar] [CrossRef]
- Gawronski, W.; Beech–Brandt, J.J.; Ahlstrom, H.G.; Maneri, E. Torque–bias profile for improved tracking of the deep space network antennas. IEEE Antennas Propag. 2000, 42, 35–45. [Google Scholar] [CrossRef]
- Wu, J.F.; Zhang, R.; Yang, G.X. Design and experiment verification of a new heavy friction–stir–weld robot for large–scale complex surface structures. Ind. Robot 2015, 42, 332–338. [Google Scholar] [CrossRef]
- Zeng, T.; Ren, X.; Zhang, Y. Fixed–Time sliding mode control and high–gain nonlinearity compensation for dual–motor driving system. IEEE Trans. Ind. Inform. 2020, 16, 4090–4098. [Google Scholar] [CrossRef]
- Wang, C.; Yang, M.; Zheng, W.L.; Hu, K.; Xu, D.G. Analysis and suppression of limit cycle oscillation for transmission system with backlash nonlinearity. IEEE Trans. Ind. Electron. 2017, 64, 9261–9270. [Google Scholar] [CrossRef]
- Verl, A.; Engelberth, T. Adaptive preloading for rack–and pinion drive systems. CIRP ANN–Manuf. Techn. 2018, 67, 369–372. [Google Scholar] [CrossRef]
- Engelberth, T.; Neubauer, M.; Verl, A. Master–switch for electrically preloaded rack–and–pinion drives—Accuracy improvement of indirectly position controlled systems. ATP Mag. 2019, 3, 54–63. [Google Scholar] [CrossRef]
- Fan, G.L.; Tang, X.C.; Shen, Y.; Deng, L.N. Model predictive control method for multi–motor system with dead zone. In Proceedings of the 2021 6th International Conference on Automation, Control and Robotics Engineering, Dalian, China, 15–17 July 2021; pp. 333–337. [Google Scholar]
- Wang, B.; Iwasaki, M.; Yu, J. Command filtered adaptive backstepping control for dual–motor servo systems with torque disturbance and uncertainties. IEEE Trans. Ind. Electron. 2022, 69, 1773–1781. [Google Scholar] [CrossRef]
- Ren, H.P.; He, B. Anti–backlash control of machine tool feed system driven by dual motor. Electr. Mach. Control 2014, 18, 60–66. [Google Scholar]
- Robertz, S.G.; Halt, L.; Kelkar., S.; Nilsson, K.; Robertsson, A.; Schär, D.; Schiffer, J. Precise robot motions using dual motor control. In Proceedings of the 2010 IEEE International Conference on Robotics and Automation, Anchorage, AK, USA, 3–7 May 2010; pp. 5613–5620. [Google Scholar]
- Tian, G.; Gao, Z.H.; Liu, P.; Bian, Y.S. Dynamic modeling and stability analysis for a spur gear system considering gear backlash and bearing clearance. Machines 2022, 10, 439. [Google Scholar] [CrossRef]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Unit | Value |
|---|---|---|
| Rated power of motors 1 and 2 | W | 20 |
| Rated speed of motors 1 and 2 | rpm | 8850 |
| Rated torque of motors 1 and 2 | mN·m | 22.9 |
| Armature inductance of motors 1 and 2 | mH | 0.115 |
| Armature resistance of motors 1 and 2 | Ω | 1.33 |
| Torque coefficient of motors 1 and 2 | mN·m/A | 16.3 |
| Counter electromotive force coefficient of motors 1 and 2 | V/rpm | 0.0017 |
| Equivalent moment of inertia of motors 1 and 2 | gcm2 | 10.49 |
| Inertia of individual flywheel | Kgm2 | 7.75 × 10−3 |
| The reduction ratio of reducers 1 and 2 | — | 66 |
| Reduction ratio of backlash elimination unit | — | 2.8 |
| Encoder resolution | ° | 0.09 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Sun, L.; Gu, H. Backlash Elimination Control for Robotic Joints with Dual–Motor Drive. Actuators 2024, 13, 291. https://doi.org/10.3390/act13080291
Sun L, Gu H. Backlash Elimination Control for Robotic Joints with Dual–Motor Drive. Actuators. 2024; 13(8):291. https://doi.org/10.3390/act13080291
Chicago/Turabian StyleSun, Longfei, and Huiying Gu. 2024. "Backlash Elimination Control for Robotic Joints with Dual–Motor Drive" Actuators 13, no. 8: 291. https://doi.org/10.3390/act13080291
APA StyleSun, L., & Gu, H. (2024). Backlash Elimination Control for Robotic Joints with Dual–Motor Drive. Actuators, 13(8), 291. https://doi.org/10.3390/act13080291